The adoption of electric vehicles promises numerous benefits for modern society. At the same time, there remain significant hurdles to their wide distribution, primarily related to battery-based energy sources. This review concerns the systematization of knowledge in one of the areas of the electric vehicle control, namely, the energy management issues when using braking controllers. The braking process optimization is summarized from two aspects. First, the advantageous solutions are presented that were identified in the field of gradual and urgent braking. Second, several findings discovered in adjacent fields of automation are debated as prospects for their possible application in braking control.
- electric vehicles
- energy efficiency
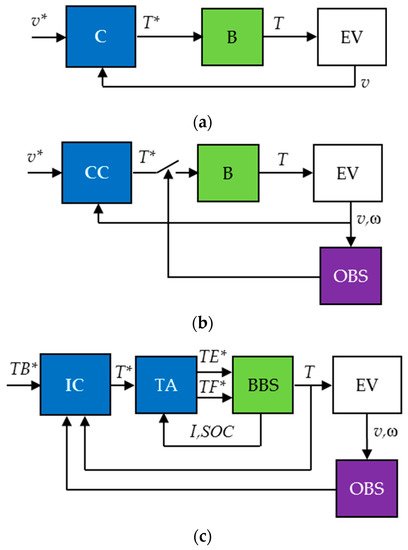
1. Braking Controllers
-
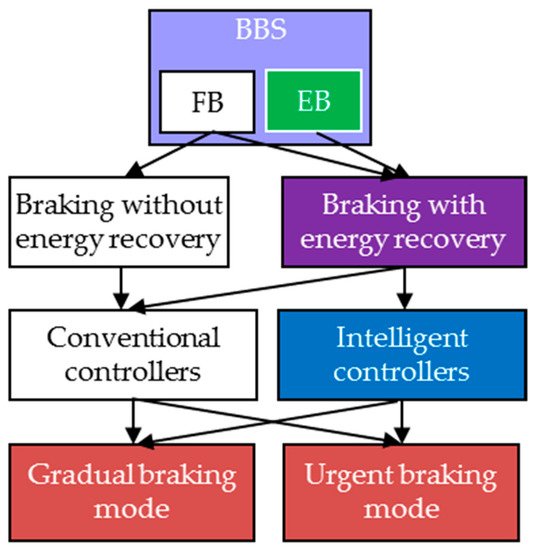
By braking modes—for gradual braking and urgent braking;
-
By estimation of the road surface—with no estimation and with surface estimation tools;
-
BY braking torque sharing—with fixed torque distribution and with its smart allocation;
-
By the toolboxes used for simulation—MATLAB/Simulink® (MathWorks, Natick, Massachusetts, USA), AMESim® (Siemens PLM Software, Plano, Texas, USA), CARSim® (Mechanical Simulation Corporation, Ann Arbor, Michigan, USA), and co-simulation, including digital twins;
-
By the tools used for model validation—without verification, with physical imitators, and with real vehicles.
2. Gradual and Urgent Braking Modes
3. Antilock Braking Systems
This entry is adapted from the peer-reviewed paper 10.3390/en14154477
References
- Kumar, V.; Nakra, B.C.; Mittal, A.P. A review on classical and fuzzy PID controllers. Int. J. Intell. Control Syst. 2011, 16, 170–181.
- Algadah, K.M.; Alaboodi, A.S. Anti-lock braking system components modelling. Int. J. Innov. Technol. Exploring Eng. 2019, 9, 3969–3975.
- Challa, A.; Ramakrushnan, K.; Subramanian, S.C.; Vivekanandan, G.; Sivaram, S. Analysis of thresholds in rule-based antilock braking control algorithms. IFAC-PapersOnLine 2020, 53, 404–409.
- Vodovozov, V.; Raud, Z.; Aksjonov, A.; Petlenkov, E. Fuzzy logic control of electric vehicles in changing braking conditions. In Proceedings of the XI International Conference on Electrical Power Drive Systems (ICEPDS), Saint-Petersburg, Russia, 4–7 October 2020; pp. 1–6.
- Liu, Q.; Sun, Z. Study on electro-hydraulic parallel brake system using HILS. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008; pp. 1–4.
- Varga, B.O.; Moldovanu, D.; Mariaşiu, F.; Iclodean, C.D. Simulation in the loop of electric vehicles. In Modeling and Simulation for Electric Vehicle Applications; Intech Open Access: London, UK, 2016; pp. 1–22.
- Lin, M.; Wang, L.; Cao, W.; Ma, B.; Cai, P. A simulation study of the design and development of vehicles regenerative braking system. Int. J. Simul. Syst. Sci. Technol. 2016, 17, 26.1–26.6.
- Ahmad, F.; Hudha, K.; Mazlan, S.A.; Jamaluddin, H.; Aparow, V.R.; Yunos, M.R.M. Simulation and experimental investigation of vehicle braking system employing a fixed caliper based electronic wedge brake. Simulation 2018, 94, 327–340.
- Chen, Z.; Lv, T.; Guo, N.; Xiao, R.; Shen, J. Study of braking energy recovery of electric vehicles equipped with super capacitor. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 7231–7236.
- Xie, Y.-B.; Wang, S.-C. Research on regenerative braking control strategy and Simulink simulation for 4WD electric vehicle. In Proceedings of the 2nd International Conference on Manufacturing Technologies (ICMT), Lakeland, FL, USA, 15–17 January 2018; pp. 1–6.
- Raud, Z.; Vodovozov, V.; Lillo, N.; Rassõlkin, A. Reserves for regenerative braking of battery electric vehicles. In Proceedings of the Electric Power Quality and Supply Reliability Conference (PQ), Rakvere, Estonia, 11–13 June 2014; pp. 1–6.
- Vodovozov, V.; Lehtla, T. Design considerations for propulsion drives of electric vehicles. In Proceedings of the 14th International Symposium “Topical Problems in the Field of Electrical and Power Engineering”, Pärnu, Estonia, 13–18 January 2014; pp. 35–39.
- Raesian, N.; Khajehpour, N.; Yaghoobi, M. A new approach in anti-lock braking system (ABS) based on adaptive neuro-fuzzy self-tuning PID controller. In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation (ICCIA), Shiraz, Iran, 27–29 December 2011; pp. 530–535.
- Guo, L.; Hui, W. The optimum cooperative controller of the steering/anti-lock braking system of the vehicle using the coordination model. In Proceedings of the International Conference on Mechatronic Science, Electric Engineering and Computer, Jilin, China, 19–22 August 2011; pp. 2031–2034.
- Wang, J.; Qiao, J.; Qi, Z. Research on control strategy of regenerative braking and anti-lock braking system for electric vehicle. In Proceedings of the 27th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium (EVS), Barcelona, Spain, 17–20 November 2013; pp. 1–7.
- Vodovozov, V.; Aksjonov, A.; Petlenkov, E.; Raud, Z. Neural network-based model reference control of braking electric vehicles. Energies 2021, 14, 2373.
- Yang, Y.; Luo, C.; Li, P. Regenerative braking control strategy of electric-hydraulic hybrid (EHH) vehicle. Energies 2017, 10, 1038.
- Konrad, R. (Ed.) Brakes, Brake Control and Driver Assistance Systems: Function, Regulation and Components; Springer: Friedrichshafen, Germany, 2014; p. 275.
- Bhandari, R.; Patil, S.; Singh, R.K. Surface prediction and control algorithms for anti-lock brake system. Transp. Res. Part C Emerg. Technol. 2012, 21, 181–195.
- Taixiong, Z.; Yage, Z. Development of hardware-in-the-loop and virtual reality co-simulation platform for automotive anti-lock braking system. In Proceedings of the IET International Conference on Information Science and Control Engineering (ICISCE), Shenzhen, China, 7–9 December 2012; pp. 1–6.
- Zhang, X.; Lin, H. UAV anti-skid braking system simulation. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 8453–8458.