Electrical power system stability is of upmost importance for a secure and reliable supply of electrical energy to residential, commercial and industrial premises. Voltage stability of microgrids, as new components of a power system, is an emerging research area within the concept of power system stability. The main purpose of developing microgrids is to facilitate the integration of renewable energy sources into the power grid. Renewable energy sources are normally connected to the grid via power electronic inverters. As various types of renewable energy sources are increasingly connected to the electrical power grid, power systems of the near future will have more inverter-based generators (IBGs) instead of synchronous generators (SGs). Since IBGs have significant differences in their characteristics compared to SGs , particularly with regard to their inertia and capability to provide reactive power, their impacts on the system dynamics are different compared to SGs. A comprehensive review on voltage stability of power systems with the inclusion of inverter-based generators is presented.
- voltage stability
- electrical power system stability
- microgrid
- renewable energy system
1. Introduction
Distributed generators (DGs), mostly based on renewable energy, interfaced to the power grid with power electronic inverters are called inverter-based generators (IBGs), or sometimes more generally are called inverter-based resources (IBRs). To make DERs controllable, they are put in the form of microgrids (MGs).
Synchronous generators (SGs) have well-defined controllers, which easily control the flow of both real and reactive power. Also, an SG usually has a heavy rotor, which provides considerable inertia that prevents sudden changes in the speed of the rotor, and this eventually helps maintain the stability of the power system when disturbances occur in a section of the system. IBGs, on the other hand, do not naturally provide inertia except if it is made virtually. Also, power flow control in IBGs is not as flexible as SG's control. Although control schemes have been developed to control IBGs active and reactive power, firstly, they cannot be controlled over a wide range that was the case for SGs, and secondly, they have an intermittent power output, which is almost continuously varying and is not exactly predictable. According to the report by the IEEE PES Task Force on Microgrid Stability Analysis and Modeling [1][2], though having a generating unit close to the load in an MG helps in the reduction of voltage drop, the limitation on the output current of IBRs is a crucial factor for voltage instability of MGs. A Microgrid generates dynamics that impact the direction of the current flow and its magnitude [3]. Furthermore, the short-circuit capacity of an IBG compared to an SG is low, which may cause a considerable drop in the MG fault level [4][5]. The low short-circuit capacity also limits its ability in providing the inrush current for induction motors [6], and creates a bus with lower strength compared with a similar bus connected to an SG.
These characteristics of IBGs cause some significant changes in the system characteristics concerning the power system stability and in particular the voltage stability [7]. To address these changes, various operation and control schemes have been proposed for power IBGs, for example [8][9][10][11][12][13].
2. Voltage Stability of Microgrids
Microgrids are managed autonomously, and act as either consumers or generators from both grid and market perspectives [14]. Microgrids can isolate themselves from the main power network in case of a fault or large disturbance [15][16]. The disconnection or reconnection is done through a single point of connection to the utility known as the point of common coupling (PCC). A microgrid must meet the established interface and interoperation requirements at the PCC, such as the one defined in the IEEE Standard 1547 for connecting inverters [15][16].
Microgrid voltage stability phenomenon is broadly classified based on disturbances in the system; however, it can be further classified based on various other factors: whether the microgrid operates grid-connected or islanded; whether the study is about the DC-link voltage stability or it is about the system voltage stability; whether the system response to a small disturbance is examined or its response to large disturbance; and all other factors that affect the microgrid voltage stability such as the Q-V droop sensitivity, the inverter dynamics, load dynamics, and dynamics of other components, e.g., under load transformers tap changers. Figure 1 shows some of these classifications and the corresponding factors.
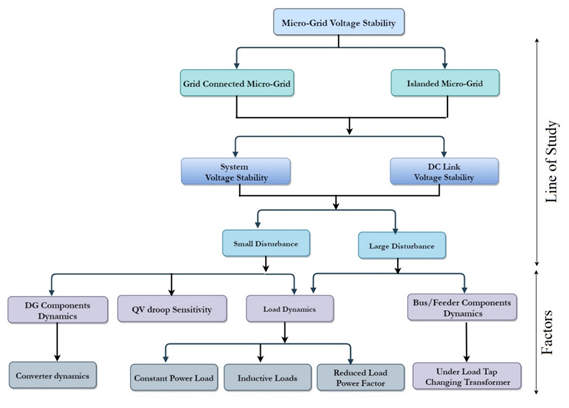
Figure 1. Study line for voltage stability in microgrids.
Static voltage stability analysis is usually not sufficient for MGs [17][18], and dynamic voltage stability analysis should be used. It is obvious that to be effective in enhancing voltage stability, IBGs should have active and reactive power control to support the system. Many voltage support strategies for grid-connected IBGs have been reported in the literature, such as [19][20][21][22]. Enhancing voltage stability of islanded MGs with voltage support is reported in [23][24]. To mitigate the voltage instability of islanded MGs, prioritized reactive current injection from the inverter has been presented as a means for voltage support. Since islanded MGs contain considerable resistive line parameters [25][26], a sufficient active current component is also required in conjunction with the reactive current to enhance the dynamic voltage stability. Based on this requirement, effective coordination between the active and reactive current components for an IBG has been proposed in [27].
2.1. Microgrid Configurations
A general criterion for a bus of a power grid to contribute towards voltage stability is to be a strong bus, i.e., having high strength, giving smaller voltage changes in response to disturbances that may occur [28]. The PCC of an MG is generally classified as a weak junction; it has a low short-circuit level and limited frequency/voltage control capability. Therefore, the first point of study for microgrid voltage stability should consider the microgrid layout architecture. Microgrid topology has considerable impact on loadability and voltage stability. It should be noted that a meshed-networked microgrid has the highest loadability while a radial network has the lowest loadability and this fact should be considered when evaluating voltage stability of microgrids.
A microgrid may also be categorized based on the type of the loads it is serving as an AC microgrid or a DC microgrid. Although the AC loads are the prominent type of loads in electrical systems, DC MGs have started attracting attention due to several advantages, including their direct inherent simple DC connectivity, improved efficiency with less power conversions and associated losses, and lack of reactive power complexity [29][30]. A particular topology of interest is a DC microgrid connected to an AC grid. Reference [31] presents a qualitative comparison analysis of power management systems for grid-connected DC MGs. A seamless interchange method between interconnected and islanded mode of a DC MG is presented in [32]. A feasible power flow solution of DC MGs and analysis of existence of the feasible power flow solution of the DC MG under droop control is presented in [33]. The large-signal stability analysis of a DC MG from a system-level perspective is presented in [34] based on the Lyapunov method. In [35], a seamless disconnection of DC MGs from upstream power grid is presented. In [36], DC MGs are used as Virtual Synchronous Machines (VSM) connected to the AC grid. An autonomous integration concept for DC microgrids into the AC grid is proposed based on the VSM concept. It utilizes a DC–AC converter as a universal VSM-based interface (VSMBI) between the AC grid and various DERs connected on the DC side. A review on protection of DC MGs is presented in [37].
Control of DC MGs and their load sharing are other active research areas. DC MGs are controlled for two main objectives: regulating the DC-link voltage to maintain the power balance between the sources and loads under steady state, and controlling dynamic conditions, which is a key for the reliable and stable operation of DC MG and load sharing while in the isolation mode [38]. Appropriate load sharing approaches are used to distribute the loads in proportion to rated power of the participant converters, which reduce the stress on each source and prevent the circulating currents [39]. The most widely implemented methods for sharing loads are the droop-based control methods, in which load sharing is achieved by adding a virtual resistance control loop as an external loop for the converter’s voltage control loop to facilitate sharing of the currents. The main advantage of droop-based control methods is its simplicity and ease of use. However, its accuracy is affected by voltage deviations due to dynamics of the loads and resistances of the power lines [40]. In order to improve the load sharing accuracy, centralized approaches based on communication networks were proposed.
2.2. Interlinking Converters, DC-Link Voltage, and Islanded Microgrids
The DC-link and interlinking converters (ICs) are key elements for coupling DGs into a microgrid. In an AC grid, active power flow is proportional to the voltage angle δ, hence frequency can be controlled by the active power or vice versa. In a DC grid, the active power flow is proportional to the DC voltage. Therefore, the DC link voltage can be controlled by the power and vice versa. The control system of a DC microgrid is considerably simpler than an AC microgrid due to the absence of control complexity for angular and frequency stability. The autonomous control of various parallel-connected converters can be easily realized through a DC bus signal control method where different voltage levels represent different operating states [41]. Stabilization of the DC-link voltage is also an important factor for maintaining microgrid dispatchability. As a common design criterion, droop control is implemented with the largest droop coefficient, while limiting the DC voltage deviation at the maximum load condition [42]. Besides normal droop control, non-linear and adaptive droop control were also researched to achieve acceptable voltage regulation at full load [43][44][45].
DGs may act as dispatchable or non-dispatchable units. Since dispatchable units are mainly responsible for stabilizing the voltage of the DC microgrid, grid forming ICs operating as constant voltage sources employ outer voltage control loops and inner current loops to stabilize the DC-link voltage to a set reference voltage [46]. Non-dispatchable energy units are mainly responsible for maintaining constant power output. Their corresponding ICs are known as grid-feeding converters and also require DC-link voltage as one of the signals in its constant current control loop [46]. In grid-connected mode, the grid normally absorbs all the power generated by IC in a microgrid. However, in the cases of grid loss, each inverter should receive, from a supervisory controller, new settings of the output power suitable to the microgrid load. However, slow-acting supervisory control may lead to significant DC link voltage rise due to the excess of circulating power among the ICs during low load [47]. In islanded AC–DC hybrid microgrids (HMG), the amount and direction of power transfer is realized through a droop characteristic implemented by the IC. The IC interfacing autonomous AC and DC subgrids always consider the loadability of both subgrids by measuring the frequency of AC grid and voltage of DC grid. The normalized frequency and normalized DC voltage are then utilized to determine the droop characteristic of HMG [48].
2.3. The Effect of Size and Duration of Disturbance
Another line of study for the microgrid voltage stability can be classified in terms of size and duration of disturbances, and the physical nature of voltage instability [49]. There may be different factors leading to various forms of disturbances resulting in voltage instability problems.
2.4. The Effect of Load Dynamics
Load dynamics affect the voltage instability among other factors. Load dynamics depend upon several parameters such as variation of active and reactive power flows with voltage and frequency. Usually, a microgrid with a constant-impedance static load has stable dynamics. Conversely, a microgrid with a constant-power load (CPL) may become unstable due to incremental negative impedance, which may result in the collapse of the load bus voltage. Many loads like motor drives or electronic loads with closed-loop power electronic converters behave as CPLs. On the other hand, the open-loop converter behaves like a resistive load [50]. During a small disturbance, the load current increases to keep the constant power output and at the same time, the load voltage will decrease. In case of an improper converter control, the load voltage may drop to very small values close to zero and may lead to complete voltage collapse [51]. Fault-induced delayed voltage recovery (FIDVR) is also a factor in the voltage stability of microgrids having high level of inductive loads. Induction motors under stalling condition may absorb up to three times their nominal reactive power to re-magnetize. The insufficient reactive power supply in such cases leads to system voltage instability. An effective strategy to improve voltage stability in a microgrid with multi-induction motor (MIM) loads was proposed by applying methods of superimposed starting strategy and fast motor cutting strategy [52].
For a constant sending-end voltage, a sudden reduction in the receiving-end load lagging power factor (i.e., an increase in receiving-end load reactive power) can cause the system to change from a stable operating condition to an unsatisfactory and possibly unstable operating condition [53], as shown in the P-V curve in Figure 2. The penetration of DG units in a microgrid can increase or decrease the voltage stability margin depending on their power factors as well as their locations. For the long-term voltage stability, it is more beneficial to have DGs operating at generating lagging power factors to improve the voltage security margin, i.e., increasing the distance to voltage collapse. When a DG operates at a leading power factor, the short-term voltage stability is generally improved as the voltage dips are reduced.
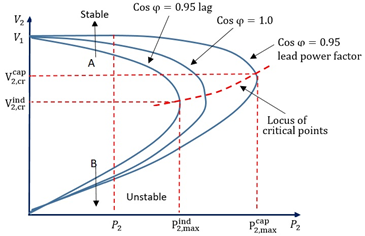
Figure 2. Effect of reactive power compensation on the P-V characteristic.
2.5. Coordination of Voltage Control Loops
Reactive power is generally supplied for improving the bus/feeder voltage profile during short-term faults. In islanded microgrid clusters, where generating units are nearby and feeder lengths are relatively short, it is easy to achieve desired reactive power-sharing by manipulating voltage control associated with DGs.
This entry is adapted from the peer-reviewed paper 10.3390/electronics10020115
References
- CIGRE. Microgrids 1: Engineering. Economics, & Experience. Conseil International des Grands Réseaux Electriques (CIGRÉ): Paris, France, 2015.
- IEEE PES. Microgrid Stability, Definitions, Analysis, and Modeling; IEEE PES: Task Force on Microgrid Stability Analysis and Modeling. NY, USA, 2008.
- Beheshtaein, S; Savaghebi, M.; Vasquez, J.C.; Guerrero, J.M. Protection of AC and DC microgrids: Challenges, solutions and future trends. In Proceedings of the IECON 2015–41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, JP, USA, 9–12 November 2015; pp. 5253–5260, doi:10.1109/IECON.
- Basak, ; Chowdhury, S.; Halder Nee Dey, S.; Chowdhury, S.P. A literature review on integration of distributed energy resources in the perspective of control, protection and stability of microgrid. Renew. Sustain. Energy Rev. 2012, 16, 5545–5556, doi:10.1016/j.rser.2012.05.043.
- Bhaskara, N.; Chowdhury, B.H. Microgrids—A review of modeling, control, protection, simulation and future potential. IEEE Power Energy Soc. Gen. Meet. 2012, doi:10.1109/PESGM.2012.6345694.
- Hossain, A.; Pota, H.R.; Hossain, M.J.; Blaabjerg, F. Evolution of microgrids with converter-interfaced generations: Challenges and opportunities. Int. J. Electr. Power Energy Syst. 2019, 109, 160–186, doi:10.1016/j.ijepes.2019.01.038.
- Schiffer, J.; Ortega, R.; Astolfi, A.; Raisch, J.; Sezi, T. Conditions for stability of droop-controlled inverter-based microgrids. Automatica 2014, 50, 2457–2469, doi:10.1016/j.automatica.2014.08.009.
- Leitner, S; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-signal stability analysis of an inverter-based microgrid with internal model-based controllers. IEEE Trans. Smart Grid 2017, 9, 5393–5402.
- Bottrell, N; Prodanovic, M.; Green, T.C. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119, doi:10.1109/TPEL.2013.2241455.
- Kroposki, B.; Lasseter, R.; Ise, T.; Morozumi, S.; Papathanassiou, S.; Hatziargyriou, N. Making microgrids work. IEEE Power Energy Mag. 2008, 6, 40–53.
- Diaz, L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Intelligent distributed generation and storage units for DC microgrids—A new concept on cooperative control without communications beyond droop control. IEEE Trans. Smart Grid 2014, 5, 2476–2485, doi:10.1109/TSG.2014.2341740.
- Guerrero, M.; Vasquez, J.C.; Matas, J.; de Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172.
- Sanduleac, M.; Toma, L.; Eremia, M.; Ciorner, I.; Bulac, C.; Tristiu, I.; Lantoc, A.; Martins, J.F. On the electrostatic inertia in microgrids with inverter-based generation only—An analysis on dynamic stability. Energies 2019, 12, doi:10.3390/en12173274.
- Bullich-Massagué, E.; Díaz-González, F.; Aragüés-Peñalba, M.; Girbau-Llistuella, F.; Olivella-Rosell, P.; Sumper, A. Microgrid clustering architectures. Appl. Energy 2018, 212, 340–361, doi:10.1016/j.apenergy.2017.12.048.
- Hatziargyriou, N.; Dimeas, A.; Tsikalakis, A. Centralized and decentralized control of microgrids. Int. J. Distrib. Energy Resour. 2005, 1, 197–212.
- Katiraei, F.; Iravani, M.R.; Lehn, P. Microgrid autonomous operation during and subsequent to islanding process. IEEE Power Eng. Soc. Gen. Meet. 2004, 2, 2175.
- Mahmoud, M.S. Microgrid Control Problems and Related Issues. In the book Microgrid: Advanced Control Methods and Renewable Energy System Integration; Elsevier, 2017; Chapter 1, pp. 1–42.
- Islam, M.; Mithulananthan, N.; Hossain, M.J. Dynamic voltage support by TL-PV systems to mitigate short-term voltage instability in residential DN. IEEE Trans. Power Syst. 2017, 33, 4360–4370.
- Varma, K.; Siavashi, E.M. PV-STATCOM: A new smart inverter for voltage control in distribution systems. IEEE Trans. Sustain. Energy 2018, 9, 1681–1691.
- Kawabe, K.; Ota, Y.; Yokoyama, A.; Tanaka, K. Novel dynamic voltage support capability of photovoltaic systems for improvement of short-term voltage stability in power systems. IEEE Trans. Power Syst. 2016, 32, 1796–1804.
- Islam, M.; Nadarajah, M.; Hossain, M.J. Short-term voltage stability enhancement in residential grid with high penetration of rooftop PV units. IEEE Trans. Sustain. Energy 2018, 10, 2211–2222.
- Alaboudy, H.K.; Zeineldin, H.H.; Kirtley, J. Simple control strategy for inverter-based distributed generator to enhance microgrid stability in the presence of induction motor loads. IET Gener. Transm. Distrib. 2013, 7, 1155–1162.
- Farrokhabadi, M.; Cañizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L.; Mendoza-Araya, P.A.; Tonkoski, R.; Tamrakar, U.; Hatziargyriou, N.; Lagosal, D.; et al. Microgrid stability definitions, analysis, and examples. IEEE Trans. Power Syst. 2020, 35, 13–29.
- Afrin, ; Yang, F.; Lu, J. Optimized reactive power support strategy for photovoltaic inverter to intensify the dynamic voltage stability of islanded microgrid. Int. Trans. Electr. Energy Syst. 2020, 30, e12356.
- Ayaz, S.; Azizipanah-Abarghooee, R.; Terzija, V. European LV microgrid benchmark network: Development and frequency response analysis. In Proceedings of the 2018 IEEE International Energy Conference, Limassol, Cyprus, 3–7 June 2018; pp. 1–6.
- Afrin, N.; Yang, F.; Lu, J. Voltage support strategy for PV inverter to enhance dynamic voltage stability of islanded microgrid. Int. J. Electr. Power Energy Syst. 2020, 121, 106059.
- IEEE Standards. IEEE Guide for Planning DC Links Terminating at AC Locations Having Low Short-Circuit Capacities. in IEEE Std 1204-1997, pp.1-216, 21 Jan. 1997, doi: 10.1109/IEEESTD.1997.85949 IEEE: NY,
- Golieva, A. Low Short-Circuit Ratio Connection of Wind Power Plants; M.Sc. Thesis, Norwegian University of Science and Technology (NTNU): Norway, 2015.
- Anand, S.; Fernandes, B.G.; Guerrero, J. Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low-Voltage DC Microgrids. IEEE Trans. Power Electron. 2013, 28, 1900–1913.
- Papadimitriou, N.; Zountouridou, E.I.; Hatziargyriou, N.D. Review of hierarchical control in DC microgrids. Electr. Power Syst. Res. 2015, 122, 159–167.
- Neto, J.d.S.; Barros, T.A.S.; Silveira, J.P.C.; Filho, E.R.; Vasquez, J.C.; Guerrero, J.M. Power management techniques for grid-connected DC microgrids: A comparative evaluation. Appl. Energy 2020, 269, doi:10.1016/j.apenergy.2020.115057.
- Kleftakis, V.; Lagos, D.; Papadimitriou, C.; Hatziargyriou, N.D. Seamless Transition between Interconnected and Islanded Operation of DC Microgrids. IEEE Transactions on Smart Grid 2019, v. 10 no. 1, pp. 248- 256.
- Liu, Z.; Liu, R.; Zhang, X.; Su, M.; Sun, Y.; Han, H.; Wang, P. Feasible power-flow solution analysis of DC microgrids under droop control. IEEE Trans. Smart Grid 2020, 11, 2771.
- Xie, W.; Han, M.; Cao, W.; Guerrero, J.M.; Vasquez, J.C. System-Level Large-Signal Stability Analysis of Droop-Controlled DC Microgrids. IEEE Trans. Power Electron. 2021, 36, 4224.
- Liu, G.; Caldognetto, T.; Mattavelli, P.; Magnone, P. Power-Based Droop Control in DC Microgrids Enabling Seamless Disconnection From Upstream Grids. IEEE Trans. Power Electron. 2019, 34, 2039.
- Chen, D.; Xu, Y.; Huang, A.Q. Integration of DC Microgrids as Virtual Synchronous Machines Into the AC Grid. IEEE Trans. Ind. Electron. 2017, 64, 7455.
- Zhang, L.; Tai, N.; Huang, W.; Liu, J.; Wang, Y. A review on protection of DC microgrids. J. Mod. Power Syst. Clean Energy 2018, 6, 1113.
- Tah, A.; Das, D. An Enhanced Droop Control Method for Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC Microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1194–1204.
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303.
- Dragičević, T.; Lu, J.C.V.X.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891.
- Shuai, Z.; Fang, J.; Ning, F.; Shen, Z.J. Hierarchical structure and bus voltage control of DC microgrid. Renew. Sustain. Energy Rev. 2018, 82, 3670–3682.
- Meng, L.; Shafiee, Q.; Ferrari Trecate, G.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948.
- Meng, L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Tertiary and Secondary Control Levels for Efficiency Optimization and System Damping in Droop Controlled DC–DC Converters. IEEE Trans. Smart Grid 2015, 6, 2615–2626.
- Chen, F.; Burgos, R.; Boroyevich, D.; Vasquez, J.C.; Guerrero, J.M. Investigation of Nonlinear Droop Control in DC Power Distribution Systems. IEEE Trans. Power Electron. 2019, 34, 9404–9421.
- Farasat, M.; Mehraeen, S.; Arabali, A.; Trzynadlowski, A. GA-based optimal power flow for microgrids with DC distribution network. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3372–3379.
- Peyghami, S.; Mokhtari, H.; Blaabjerg, F. Hierarchical power sharing control in DC microgrids. In Microgrid; Elsevier: Amsterdam, The Netherlands, 2017; pp. 63–100.
- Issa, W.; Al-naemi, F.; Konstantopoulos, G.; Sharkh, S.; Abusara, M. Stability Analysis and Control of a Microgrid against Circulating Power between Parallel Inverters. Energy Procedia 2019, 157, 1061–1070.
- Loh, C.; Li, Y.K.C.D.; Blaabjerg, F. Autonomous operation of hybrid microgrid with ac and dc subgrids. IEEE Trans. Power Electron. 2013, 28, 2214–2223.
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill New York: USA, 1994.
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125, doi:10.1109/TVT.2006.877483.
- Al-Nussairi, M.K.; Bayindir, R.; Padmanaban, S.; Mihet-Popa, L.; Siano, P. Constant power loads (CPL) with Microgrids: Problem definition, stability analysis and compensation techniques. Energies 2017, 10, 1656, doi:10.3390/en10101656.
- Lin, L.; Zhao, X.; Zhu, J.; Zhang, X.; Yang, R. Simulation Analysis of Microgrid Voltage Stability with Multi-induction Motor Loads. Electr. Power Compon. Syst. 2018, 46, 560–569, doi:10.1080/15325008.2018.1459958.
- Eremia, M.; Shahidehpour, M. Handbook of Electrical Power System Dynamics: Modeling, Stability, and Control; Wiely: NJ, USA, 2013.