Building on the recent progress of four-dimensional (4D) printing to produce dynamic
structures, this study aimed to bring this technology to the next level by introducing control-based 4D
printing to develop adaptive 4D-printed systems with highly versatile multi-disciplinary applications,
including medicine, in the form of assisted soft robots, smart textiles as wearable electronics and
other industries such as agriculture and microfluidics. This study introduced and analyzed adaptive
4D-printed systems with an advanced manufacturing approach for developing stimuli-responsive
constructs that organically adapted to environmental dynamic situations and uncertainties as nature
does. The adaptive 4D-printed systems incorporated synergic integration of three-dimensional
(3D)-printed sensors into 4D-printing and control units, which could be assembled and programmed
to transform their shapes based on the assigned tasks and environmental stimuli. This paper
demonstrates the adaptivity of these systems via a combination of proprioceptive sensory feedback,
modeling and controllers, as well as the challenges and future opportunities they present.
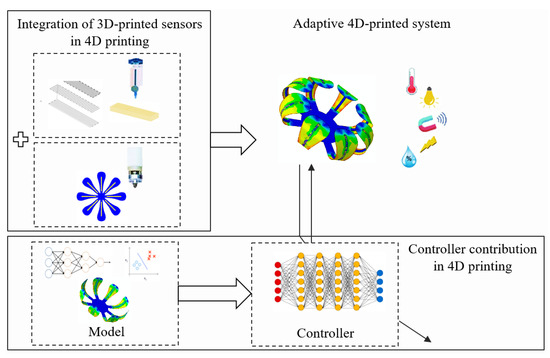
The synergic integration of the main components to develop adaptive 4D-printed systems are explained in this section (). In addition to the incorporation of 3D-printed sensors and 4D printing, controller units are required to command the necessary input to the 4D-printed system based on the acquired information. The 4D-printed systems developed so far are mainly reliant on the morphology of soft materials rather than the sophisticated control methods. However, considering the potential exposure to a wide range of dynamic environments, 4D-printed systems demand more robust controllers, particularly in highly sensitive tasks.
Figure 3. Adaptive 4D-printed systems composition.
A closed-loop controller for the 4D-printed soft robots was recently introduced in order to improve the performance of the soft robots [
112]. The active control of 4D prints was achieved by combining the 3D-printed shape-memory polymer composites with a controller that regulated power input to the composite in order to manipulate the material’s heating behavior, considering the variations in resistance caused by the changes in strain or temperature [
113]. However, the dynamic modeling of such systems was not simply due to their non-linear behavior, infinite degrees of freedom, hyperelasticity, heterogeneous materials properties and hysteresis [
114]. In other words, predicting the motion of the actuators based on the input-stimuli could not readily be calculated via the inverse kinematics equations used in the rigid bodies such as the Cosserat rod theory [
115] beam theory [
116] and constant curvature model [
117] methods, because of the computational expenses and steady-state assumptions [
118]. Therefore, machine-learning methods could be an appropriate choice to realize adaptive 4D-printed systems [
119].
To equip the 4D-printed systems with adaptive controllability required for real-world dynamic variations, ML algorithms are suitable solutions due to recent advancements in nonlinear systems modeling [
120,
121,
122]. The finite element model (FEM) is employed to train the ML algorithm to effectively calculate volumetric properties such as spatially heterogeneous mechanical strengths, variable stiffness, and the targeted anisotropy during the 4D-printing process. Further, the control algorithms will be developed and incorporated into the 4D-printing platform to compute the precise actuation signal to adapt to the uncertain and dynamic environments [
123,
124,
125,
126]. However, closed-loop controllers are preferred here to make the most of the integrated 3D-printed sensors in handling uncertainties for wide frequency bandwidths [
122,
127,
128,
129,
130]. Indeed, in order to increase the efficiency of control strategies in terms of time and computational costs, model-based ML [
131] in conjunction with self-learning controllers [
132,
133] are preferred compared to the model-free controllers to deal with the complexity involved in diverse scenarios [
66,
129,
134,
135,
136]. A forward dynamics model using recurrent or convolutional neural networks could be employed to implement a model-based feedback controller for an adaptive 4D-printed system [
137]. Then, a policy-based reinforcement-learning feedback controller can be used to learn the nonlinear model of a 4D-printed soft robot through experiments and simulation data to compensate for the uncertainties. The self-learning algorithms play a significant role in adaptive 4D-printed systems to optimize the controller commands based on the information acquired from the interaction with the environment via the 3D-printed sensors [
138,
139,
140,
141,
142].
Model-based ML algorithms, however, require a large pool of data containing different scenarios of environmental changes to be trained to represent the 4D-printed system model with time-variable properties and multi-dimensional control states [
143,
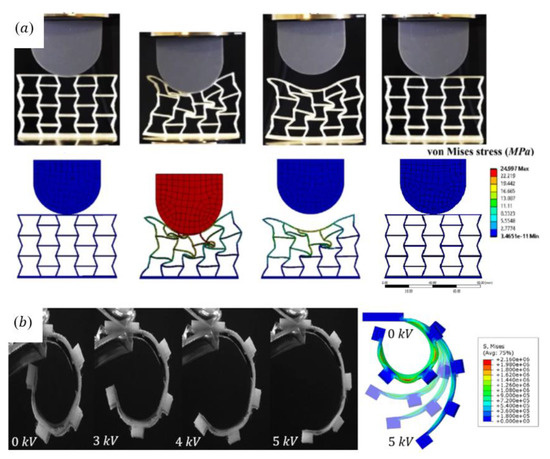
144]. The training process could be repetitious and expensive if it merely relies on experimental tests, therefore, the FEM () can be used in the offline loop for constructing a comprehensive and reliable model exploring the various possible scenarios [
143,
144,
145,
146,
147,
148,
149].
Figure 4. Finite element model (FEM) of 4D-printed systems (
a) A reversible energy-absorbing metastructure (reproduced from [
27] with the permission of Elsevier); (
b) A dielectric elastomer (DE) soft gripper (reproduced from [
65] with the permission of Elsevier).
Recent advancements in control-based 4D printing with integrating the sensors, ML models trained by FEM results, and controlling the entire 4D-printed systems are gathered in . To the best of the knowledge of the authors, there has yet to be an entirely adaptive 4D-printed system, as defined in this paper. However, there are some promising studies in integrated 3D-printed sensors in 4D printing [
7,
16,
38,
39,
40,
67,
150], the application of the FEM [
151] and ML-based controllers in 4D-printed systems [
34,
66,
135]. These relevant research results support the possibility of realizing the proposed adaptive 4D-printed systems.
Table 2. Studies toward adaptive 4D-printed systems.
Additionally, there have been several studies on the design and fabrication of 4D-printed compliant mechanisms promoting controlled self-management and self-actuation without needing sensors [
34,
56,
63,
152,
153,
154]. Further investigations on equipping such mechanisms with controllers to provide more flexibility and adaptability are envisaged, allowing for their wider ranges of autonomous operations. It is interesting to note that, there have been only a few studies on the use of the FEM to design and optimize controllers in 4D-printed systems. This will certainly increase the robustness and repeatability of 4D-printed systems in diverse applications with variable unstructured environments.
This entry is adapted from the peer-reviewed paper 10.3390/app10093020