This research delves into the challenges of Wi-Fi fingerprint-based indoor localization in dynamic environments, addressing the evolving nature of signal patterns and feature spaces over time. The study focuses on improving adaptive long-term localization accuracy by examining temporal variations in signal strength across 25 months. The research employs key methodologies such as mean-based feature selection, principal component analysis (PCA), and functional discriminant analysis (FDA) to examine signal features and address multicollinearity. The paper introduces an innovative algorithm, Ada-LT IP, which integrates data reduction and transfer learning techniques to enhance accuracy. The proposed method effectively mitigates signal fluctuations and reduces computational complexity, resulting in superior performance compared to current state-of-the-art approaches, as measured by mean absolute error. This research provides critical insights into enhancing adaptive long-term Wi-Fi indoor localization systems, paving the way for more reliable applications in real-world settings.
- indoor localization
- Wi-Fi fingerprinting
- functional discriminant analysis
- transferlearning
- features extraction
- computational complexity
1. Introduction
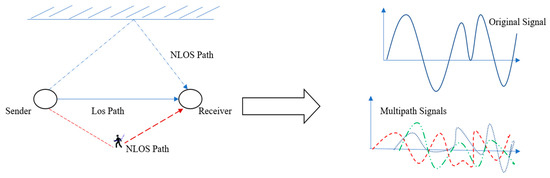
With the advent of the Internet of Things (IoT), along with the rollout of 5G and emerging 6G technologies, the significance of location-based services (LBS) has markedly increased. Accurate indoor positioning information is essential for a range of applications, including business location services, data mining, security monitoring, and venue management [1][2][3][4]. While global positioning system (GPS) technology operates effectively in outdoor settings, it proves inadequate for indoor localization due to weak signal reception in complex environments. Key challenges include limited line of sight, insufficient satellite signal penetration, and interference from internal obstacles, such as shadows and multipath fading [5][6][7][8][9]. As urbanization intensifies and a majority of activities shift indoors, the demand for reliable indoor positioning systems (IPSs) has surged. A variety of wireless technologies have emerged to address this need, including radio frequency identification (RFID) [10], Bluetooth [11], ultra-wideband (UWB) [12], Zigbee [13], inertial navigation [14], and visible light communication (VLC) [15]. However, the implementation of these technologies often incurs significant infrastructure costs. Effective IPSs leverage diverse signal characteristics—such as received signal strength (RSS), channel state information (CSI), angle of arrival (AOA), and time of arrival (TOA)—to accurately locate objects or individuals in environments where GPS signals are compromised. To meet the demands of indoor settings, these systems must provide high accuracy, rapid estimation times, and low power consumption. Nevertheless, the dynamic nature of indoor environments introduces variability in signal patterns, which can adversely affect positioning performance [16][17][18]. To achieve a balance between computational costs and accuracy, IPSs must optimize available resources while accounting for environmental factors and maintaining an acceptable margin of error. The mission of the application and the overall system cost are also critical determinants of positioning performance [19][20][21]. Among the various indoor positioning technologies, Wi-Fi fingerprint-based IPS (FPBIPS) stands out as a particularly promising solution owing to its cost-effectiveness and ease of implementation. However, FPBIPS is susceptible to challenges posed by multipath effects, shadowing, and scattering, which are influenced by the dynamic nature of indoor environments [22][23][24]. Additionally, signal attenuation in wireless communication systems—primarily attributed to path loss, shadowing, and multipath effects—can significantly degrade location accuracy [25]. Figure 1 illustrates the impact of multipath on the received signal within an indoor setting.
- (1)
-
We propose the application of functional discriminant analysis (FDA) in combination with transfer learning techniques to tackle the challenge of high offline fingerprint calibration overhead. To achieve this, we generate new feature spaces that focus on the most significant predictors. These predictors enhance the separability of the model, leading to improved accuracy in indoor positioning estimates.
- (2)
-
We examined the impact of sampling signal fluctuations on different algorithms in indoor localization scenarios. Multiple training samples were used to assess the influence of sampling fluctuations, while all collected testing samples for each month were used to evaluate algorithm robustness.
- (3)
-
We applied covariance analysis (CA) to reduce the multicollinearity problem of the various RSS values collected at a reference point (RP), aiming to minimize computational complexity.
- (4)
-
We compare the performance of different feature extraction methods, namely mean signal values, principal component analysis (PCA), and linear discriminant analysis (LDA/FDA), for adaptive LT Wi-Fi IP. We evaluate the effectiveness of these methods based on the achieved metrics and also investigate the hybrid effect of combining features extracted from multiple methods.
2. Related Works
This entry is adapted from the peer-reviewed paper 10.3390/s24175665
References
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J., Jr. Evolution of indoor positioning technologies: A survey. J. Sens. 2017, 2017, 2630413.
- Chin, W.L.; Hsieh, C.C.; Shiung, D.; Jiang, T. Intelligent indoor positioning based on artificial neural networks. IEEE Netw. 2020, 34, 164–170.
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Elikplim, N.R.; Li, L. A Survey on Fusion-Based Indoor Positioning. IEEE Commun. Surv. Tutor. 2020, 22, 566–594.
- Basri, C.; El Khadimi, A. Survey on indoor localization system and recent advances of WIFI fingerprinting technique. In Proceedings of the 2016 5th International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 29 September–1 October 2016; pp. 253–259.
- Bergen, M.H.; Jin, X.; Guerrero, D.; Chaves, H.A.; Fredeen, N.V.; Holzman, J.F. Design and implementation of an optical receiver for angle-of-arrival-based positioning. J. Light. Technol. 2017, 35, 3877–3885.
- Wann, C.D.; Yeh, Y.J.; Hsueh, C.S. Hybrid TDOA/AOA indoor positioning and tracking using extended Kalman filters. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, VIC, Australia, 7–10 May 2006; Volume 3, pp. 1058–1062.
- Xiong, W.; Bordoy, J.; Gabbrielli, A.; Fischer, G.; Schott, D.J.; Höflinger, F.; Wendeberg, J.; Schindelhauer, C.; Rupitsch, S.J. Two efficient and easy-to-use NLOS mitigation solutions to indoor 3-D AOA-based localization. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8.
- Alteneiji, A.; Ahmad, U.; Poon, K.; Ali, N.; Almoosa, N. Indoor localization in multi-path environment based on AoA with particle filter. In Proceedings of the 2020 3rd International Conference on Signal Processing and Information Security (ICSPIS), Dubai, United Arab Emirates, 25–26 November 2020; pp. 1–4.
- Lembo, S.; Horsmanheimo, S.; Honkamaa, P. Indoor positioning based on RSS fingerprinting in a LTE network: Method based on genetic algorithms. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6.
- Cheerla, S.; Ratnam, D.V. RSS based Wi-Fi positioning method using multi layer neural networks. In Proceedings of the 2018 Conference on Signal Processing and Communication Engineering Systems (SPACES), Vijayawada, India, 4–5 January 2018; pp. 58–61.
- Cheema, M.A. Indoor location-based services: Challenges and opportunities. SIGSPATIAL Spec. 2018, 10, 10–17.
- He, S.; Chan, S.H. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490.
- Wang, K.; Chen, Y.; Wang, Y.; Chen, X.; Chen, J. WiFi-based indoor positioning technologies for smart indoor spaces. IEEE Access 2020, 8, 199724–199742.
- Giuliano, R.; Mazzenga, F.; Petracca, M.; Vari, M. Indoor localization system for first responders in emergency scenario. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 1821–1826.
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G networks: Use cases and technologies. IEEE Commun. Mag. 2020, 58, 55–61.
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599.
- Curran, K.; Furey, E.; Lunney, T.; Santos, J.; Woods, D.; McCaughey, A. An evaluation of indoor location determination technologies. J. Locat. Based Serv. 2011, 5, 61–78.
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218.
- Xiang, Z.; Song, S.; Chen, J.; Wang, H.; Huang, J.; Gao, X. A wireless LAN-based indoor positioning technology. IBM J. Res. Dev. 2004, 48, 617–626.
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Zhou, G.; Xu, S.; Zhang, S.; Wang, Y.; Xiang, C. Multi-floor indoor localization based on multi-modal sensors. Sensors 2022, 22, 4162.
- Huang, L.; Yu, B.; Du, S.; Li, J.; Jia, H.; Bi, J. Multi-Level Fusion Indoor Positioning Technology Considering Credible Evaluation Analysis. Remote Sens. 2023, 15, 353.
- Ferris, B.; Fox, D.; Lawrence, N.D. Wifi-slam using gaussian process latent variable models. In Proceedings of the 20th International Joint Conference on Artifical Intelligence, Hyderabad, India, 6–12 January 2007; Volume 7, pp. 2480–2485.
- Du, X.; Liao, X.; Liu, M.; Gao, Z. CRCLoc: A crowdsourcing-based radio map construction method for WiFi fingerprinting localization. IEEE Internet Things J. 2021, 9, 12364–12377.
- Fang, S.H.; Lin, P.; Lin, T.N. Indoor localization by a novel probabilistic approach. In Proceedings of the 2007 IEEE 8th Workshop on Signal Processing Advances in Wireless Communications, Helsinki, Finland, 17–20 June 2007; pp. 1–4.
- Njima, W.; Ahriz, I.; Zayani, R.; Terre, M.; Bouallegue, R. Smart probabilistic approach with RSSI fingerprinting for indoor localization. In Proceedings of the 2017 25th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 21–23 September 2017; pp. 1–6.
- Singh, N.; Choe, S.; Punmiya, R. Machine learning based indoor localization using Wi-Fi RSSI fingerprints: An overview. IEEE Access 2021, 9, 127150–127174.
- Roy, P.; Chowdhury, C. A survey of machine learning techniques for indoor localization and navigation systems. J. Intell. Robot. Syst. 2021, 101, 63.
- Scherhaeufl, M.; Pichler, M.; Schimbaeck, E.; Mueller, D.J.; Ziroff, A.; Stelzer, A. Indoor localization of passive UHF RFID tags based on phase-of-arrival evaluation. IEEE Trans. Microw. Theory Tech. 2013, 61, 4724–4729.
- Giovanelli, D.; Farella, E.; Fontanelli, D.; Macii, D. Bluetooth-based indoor positioning through ToF and RSSI data fusion. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8.
- Yang, F.; Xiong, J.; Liu, J.; Wang, C.; Li, Z.; Tong, P.; Chen, R. A pairwise SSD fingerprinting method of smartphone indoor localization for enhanced usability. Remote Sens. 2019, 11, 566.
- Wang, W.; Li, T.; Wang, W.; Tu, Z. Multiple fingerprints-based indoor localization via GBDT: Subspace and RSSI. IEEE Access 2019, 7, 80519–80529.
- Dai, Q.; Qian, B.; Baotoeng, G.O.; Guo, X.; Ansari, N. GRIDLoc: A Gradient Blending and Deep Learning based Localization Approach Combining RSS and CSI. IEEE Wirel. Commun. Lett. 2024. early access.
- Farid, Z.; Nordin, R.; Ismail, M.; Abdullah, N.F. Hybrid indoor-based WLAN-WSN localization scheme for improving accuracy based on artificial neural network. Mob. Inf. Syst. 2016, 2016, 6923931.
- Liu, Z.; Dai, B.; Wan, X.; Li, X. Hybrid wireless fingerprint indoor localization method based on a convolutional neural network. Sensors 2019, 19, 4597.
- Zhang, L.; Tan, T.; Gong, Y.; Yang, W. Fingerprint database reconstruction based on robust PCA for indoor localization. Sensors 2019, 19, 2537.
- Abdi, H.; Williams, L.J. Principal component analysis. Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 433–459.
- Jolliffe, I.T.; Cadima, J. Principal component analysis: A review and recent developments. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2016, 374, 20150202.
- Liu, D.; Liu, Z.; Song, Z. LDA-based CSI amplitude fingerprinting for device-free localization. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020.
- Sanam, T.F.; Godrich, H. Device free indoor localization using discriminant features of CSI a canonical correlation paradigm. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 423–427.
- Yuan, Y.; Liu, X.; Liu, Z.; Xu, Z. MFMCF: A novel indoor location method combining multiple fingerprints and multiple classifiers. In Proceedings of the 2019 3rd International Symposium on Autonomous Systems (ISAS), Shanghai, China, 29–31 May 2019; pp. 216–221.
- Wang, J.; Wang, X.; Peng, J.; Hwang, J.G.; Park, J.G. Indoor fingerprinting localization based on fine-grained CSI using principal component analysis. In Proceedings of the 2021 Twelfth International Conference on Ubiquitous and Future Networks (ICUFN), Jeju Island, Republic of Korea, 17–20 August 2021; pp. 322–327.
- Liu, W.; Cheng, Q.; Deng, Z.; Chen, H.; Fu, X.; Zheng, X.; Zheng, S.; Chen, C.; Wang, S. Survey on CSI-based indoor positioning systems and recent advances. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8.
- Subhan, F.; Saleem, S.; Bari, H.; Khan, W.Z.; Hakak, S.; Ahmad, S.; El-Sherbeeny, A.M. Linear discriminant analysis-based dynamic indoor localization using bluetooth low energy (BLE). Sustainability 2020, 12, 10627.
- Hailu, T.; Edris, T. MultiDMet: Designing a Hybrid Multidimensional Metrics Framework to Predictive Modeling for Performance Evaluation and Feature Selection. Intell. Inf. Manag. 2023, 15, 391–425.
- Ferris, B.; Fox, D.; Lawrence, N.D. Wifi-slam using gaussian process latent variable models. In Proceedings of the 20th International Joint Conference on Artifical Intelligence, Hyderabad, India, 6–12 January 2007; Volume 7, pp. 2480–2485.
- Kjærgaard, M.B.; Treu, G.; Ruppel, P.; Küpper, A. Efficient indoor proximity and separation detection for location fingerprinting. In Proceedings of the 1st International ICST Conference on Mobile Wireless Middleware, Operating Systems and Applications, Chicago, IL, USA, 30 June–2 July 2010.
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space: Wireless indoor localization with little human intervention. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 269–280.
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304.
- Alzantot, M.; Youssef, M. Crowdinside: Automatic construction of indoor floorplans. In Proceedings of the 20th International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 6–9 November 2012; pp. 99–108.
- Constandache, I.; Gaonkar, S.; Sayler, M.; Choudhury, R.R.; Cox, L. Enloc: Energy-efficient localization for mobile phones. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2716–2720.
- Luo, R.C.; Hsiao, T.J. Indoor localization system based on hybrid Wi-Fi/BLE and hierarchical topological fingerprinting approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806.
- Chong AM, S.; Yeo, B.C.; Lim, W.S.; Pratap, S. Integration of UWB RSS to Wi-Fi RSS fingerprinting-based indoor positioning system. Cogent Eng. 2022, 9, 2087364.
- Huang, Q.; Zhang, Y.; Ge, Z.; Lu, C. Refining Wi-Fi based indoor localization with Li-Fi assisted model calibration in smart buildings. arXiv 2016, arXiv:1602.07399.
- Li, D.; Xu, J.; Yang, Z.; Tang, C. Train Once, Locate Anytime for Anyone: Adversarial Learning-based Wireless Localization. ACM Trans. Sens. Netw. 2024, 20, 1–21.
- Yong, L.H.; Zhao, M. Indoor positioning based on hybrid domain transfer learning. IEEE Access 2020, 8, 130527–130539.
- Zhang, Y.; Wu, C.; Chen, Y. A low-overhead indoor positioning system using CSI fingerprint based on transfer learning. IEEE Sens. J. 2021, 21, 18156–18165.