The planet Mars is the most probable among the terrestrial planets in our solar system to support human settlement or colonization in the future. The detection of water ice or liquid water on the shallow subsurface of Mars is a crucial scientific objective for both the Chinese Tianwen-1 and United States Mars 2020 missions, which were launched in 2020. Both missions were equipped with Rover-mounted ground-penetrating radar (GPR) instruments, specifically the RoPeR on the Zhurong rover and the RIMFAX radar on the Perseverance rover. The in situ radar provides unprecedented opportunities to study the distribution of shallow subsurface water ice on Mars with its unique penetrating capability. The presence of water ice on the shallow surface layers of Mars is one of the most significant indicators of habitability on the extraterrestrial planet.
- Mars
- water ice
- shallow subsurface
- Martian-based ground-penetrating radars
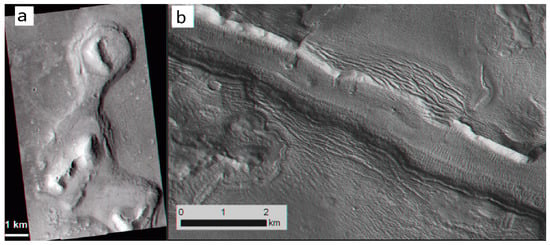
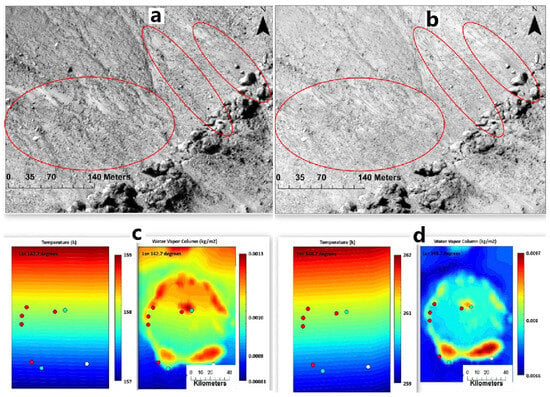
1. Remote Sensing Photography
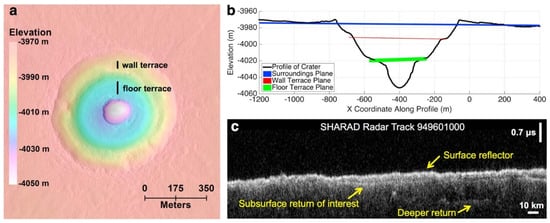
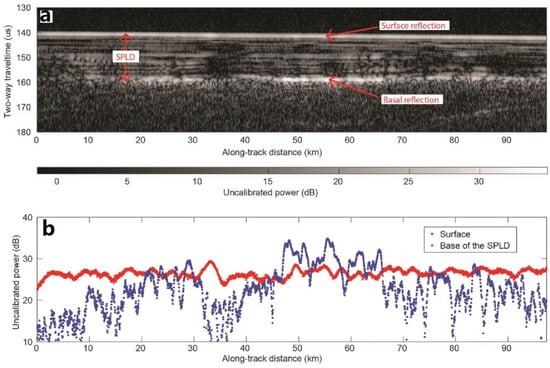
2. Radar Observation
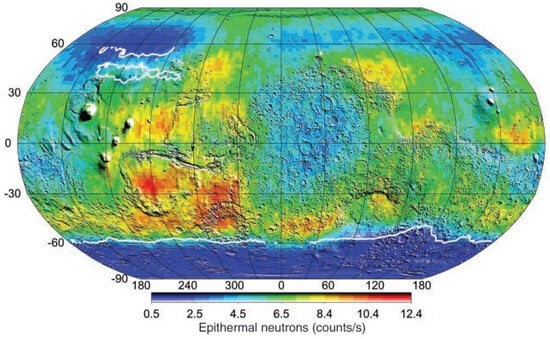
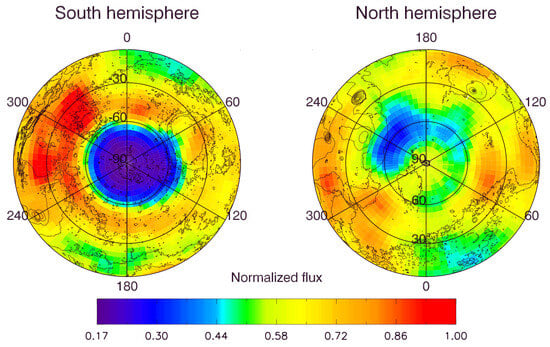
3. Measurements by Gamma Ray Spectroscopy and Neutron Spectrometers
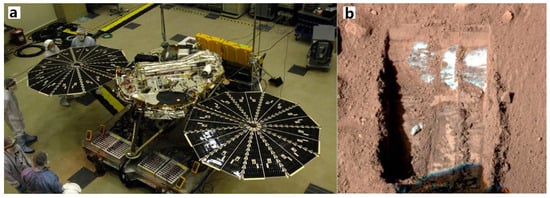
4. Soil Analysis
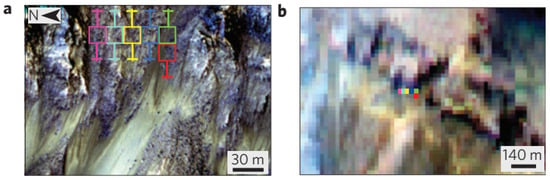
5. Other Observation Methods
This entry is adapted from the peer-reviewed paper 10.3390/rs16050824
References
- Malin, M.; Danielson, G.; Ravine, M.; Soulanille, T. Design and development of the Mars Observer Camera. Int. J. Imaging Syst. Technol. 1991, 3, 76–91.
- Wiens, R.C.; Maurice, S.; Robinson, S.H.; Nelson, A.E.; Cais, P.; Bernardi, P.; Newell, R.T.; Clegg, S.; Sharma, S.K.; Storms, S.; et al. The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests. Space Sci. Rev. 2020, 217, 4.
- Thomas, N.; Cremonese, G.; Ziethe, R.; Gerber, M.; Brändli, M.; Bruno, G.; Erismann, M.; Gambicorti, L.; Gerber, T.; Ghose, K.; et al. The Colour and Stereo Surface Imaging System (CaSSIS) for the ExoMars Trace Gas Orbiter. Space Sci. Rev. 2017, 212, 1897–1944.
- Martínez-Alonso, S.; Mellon, M.T.; Banks, M.E.; Keszthelyi, L.P.; McEwen, A.S.; Team, T.H. Evidence of volcanic and glacial activity in Chryse and Acidalia Planitiae, Mars. Icarus 2011, 212, 597–621.
- Pedersen, G.; Head, J., III; Wilson, L. Formation, erosion and exposure of Early Amazonian dikes, dike swarms and possible subglacial eruptions in the Elysium Rise/Utopia Basin Region, Mars. Earth Planet. Sci. Lett. 2010, 294, 424–439.
- Howari, F.M.; Sharma, M.; Xavier, C.M.; Nazzal, Y.; Alaydaroos, F. Atmospheric, Geomorphological, and Compositional Analysis of Martian Asimov and Hale Craters: Implications for Recurring Slope Lineae. Front. Astron. Space Sci. 2022, 8, 244.
- Li, C.; Zhang, R.; Yu, D.; Dong, G.; Liu, J.; Geng, Y.; Sun, Z.; Yan, W.; Ren, X.; Su, Y.; et al. China’s Mars exploration mission and science investigation. Space Sci. Rev. 2021, 217, 57.
- Pedersen, G.B.M.; Head, J.W. Evidence of widespread degraded Amazonian-aged ice-rich deposits in the transition between Elysium Rise and Utopia Planitia, Mars: Guidelines for the recognition of degraded ice-rich materials. Planet. Space Sci. 2010, 58, 1953–1970.
- Zhou, B.; Shen, S.; Lu, W.; Liu, Q.; Tang, C.; Li, S.; Fang, G. The Mars rover subsurface penetrating radar onboard China’s Mars 2020 mission. Earth Planet. Phys. 2020, 4, 345–354.
- Picardi, G.; Biccari, D.; Seu, R.; Plaut, J.; Johnson, W.; Jordan, R.; Safaeinili, A.; Gurnett, D.; Huff, R.; Orosei, R.; et al. MARSIS: Mars advanced radar for subsurface and ionosphere sounding. In Mars Express: The Scientific Payload; NASA/ADS: Cambridge, MA, USA, 2004; Volume 1240, pp. 51–69.
- Picardi, G.; Plaut, J.J.; Biccari, D.; Bombaci, O.; Calabrese, D.; Cartacci, M.; Cicchetti, A.; Clifford, S.M.; Edenhofer, P.; Farrell, W.M.; et al. Radar soundings of the subsurface of Mars. Science 2005, 310, 1925–1928.
- Seu, R.; Biccari, D.; Orosei, R.; Lorenzoni, L.; Phillips, R.; Marinangeli, L.; Picardi, G.; Masdea, A.; Zampolini, E. SHARAD: The MRO 2005 shallow radar. Planet. Space Sci. 2004, 52, 157–166.
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L.; et al. SHARAD sounding radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. Planets 2007, 112, E05S05.
- Zhou, H.; Feng, X.; Zhou, B.; Dong, Z.; Fang, G.; Zeng, Z.; Liu, C.; Li, Y.; Lu, W. Polarized Orientation Calibration and Processing Strategies for Tianwen-1 Full-Polarimetric Mars Rover Penetrating Radar Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5119914.
- Qiu, X.; Ding, C. Radar Observation of the Lava Tubes on the Moon and Mars. Remote Sens. 2023, 15, 2850.
- Chen, R.; Zhang, L.; Xu, Y.; Liu, R.; Bugiolacchi, R.; Zhang, X.; Chen, L.; Zeng, Z.; Liu, C. Martian soil as revealed by ground-penetrating radar at the Tianwen-1 landing site. Geology 2023, 51, 315–319.
- Dong, Z.; Feng, X.; Zhou, H.; Liu, C.; Lu, Q.; Liang, W. Assessing the effects of induced field rotation on water ice detection of Tianwen-1 full-polarimetric Mars rover penetrating radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13.
- Liu, H.; Li, J.; Meng, X.; Zhou, B.; Fang, G.; Spencer, B.F. Discrimination Between Dry and Water Ices by Full Polarimetric Radar: Implications for China’s First Martian Exploration. IEEE Trans. Geosci. Remote Sens. 2022, 61, 5100111.
- Grima, C.; Kofman, W.; Herique, A.; Orosei, R.; Seu, R. Quantitative analysis of Mars surface radar reflectivity at 20 MHz. Icarus 2012, 220, 84–99.
- Nouvel, J.F.; Herique, A.; Kofman, W.; Safaeinili, A. Radar signal simulation: Surface modeling with the facet method. Radio Sci. 2004, 39, RS1013.
- Jordan, R.; Picardi, G.; Plaut, J.; Wheeler, K.; Kirchner, D.; Safaeinili, A.; Johnson, W.; Seu, R.; Calabrese, D.; Zampolini, E.; et al. The Mars express MARSIS sounder instrument. Planet. Space Sci. 2009, 57, 1975–1986.
- Xiong, S.; Muller, J.P.; Tao, Y.; Ding, C.; Zhang, B.; Li, Q. Combination of MRO SHARAD and deep-learning-based DTM to search for subsurface features in Oxia Planum, Mars. Astron. Astrophys. 2023, 676, A16.
- Bramson, A.M.; Byrne, S.; Putzig, N.E.; Sutton, S.; Plaut, J.J.; Brothers, T.C.; Holt, J.W. Widespread excess ice in arcadia planitia, Mars. Geophys. Res. Lett. 2015, 42, 6566–6574.
- Orosei, R.; Lauro, S.E.; Pettinelli, E.; Cicchetti, A.; Coradini, M.; Cosciotti, B.; Di Paolo, F.; Flamini, E.; Mattei, E.; Pajola, M.; et al. Radar evidence of subglacial liquid water on Mars. Science 2018, 361, 490–493.
- Fan, M.; Lyu, P.; Su, Y.; Du, K.; Zhang, Q.; Zhang, Z.; Dai, S.; Hong, T. The Mars orbiter subsurface investigation radar (MOSIR) on China’s Tianwen-1 mission. Space Sci. Rev. 2021, 217, 8.
- Hong, T.; Su, Y.; Fan, M.; Dai, S.; Lv, P.; Ding, C.; Zhang, Z.; Wang, R.; Liu, C.; Du, W.; et al. Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter. Remote Sens. 2021, 13, 5049.
- Hamran, S.E.; Paige, D.A.; Allwood, A.; Amundsen, H.E.; Berger, T.; Brovoll, S.; Carter, L.; Casademont, T.M.; Damsgård, L.; Dypvik, H.; et al. Ground penetrating radar observations of subsurface structures in the floor of Jezero crater, Mars. Sci. Adv. 2022, 8, eabp8564.
- Li, C.; Zheng, Y.; Wang, X.; Zhang, J.; Wang, Y.; Chen, L.; Zhang, L.; Zhao, P.; Liu, Y.; Lv, W.; et al. Layered subsurface in Utopia Basin of Mars revealed by Zhurong rover radar. Nature 2022, 610, 308–312.
- Farley, K.A.; Williford, K.H.; Stack, K.M.; Bhartia, R.; Chen, A.; de la Torre, M.; Hand, K.; Goreva, Y.; Herd, C.D.; Hueso, R.; et al. Mars 2020 mission overview. Space Sci. Rev. 2020, 216, 1–41.
- Herve, Y.; Ciarletti, V.; Le Gall, A.; Corbel, C.; Hassen-Khodja, R.; Benedix, W.; Plettemeier, D.; Humeau, O.; Vieau, A.J.; Lustrement, B.; et al. The WISDOM radar on board the ExoMars 2022 Rover: Characterization and calibration of the flight model. Planet. Space Sci. 2020, 189, 104939.
- Evans, L.G.; Reedy, R.C.; Starr, R.D.; Kerry, K.E.; Boynton, W.V. Analysis of gamma ray spectra measured by Mars Odyssey. J. Geophys. Res. Planets 2006, 111, E03S04.
- Saunders, R.; Arvidson, R.; Badhwar, G.; Boynton, W.; Christensen, P.; Cucinotta, F.; Feldman, W.; Gibbs, R.; Kloss, C.; Landano, M.; et al. 2001 Mars Odyssey mission summary. Space Sci. Rev. 2004, 110, 1–36.
- Boynton, W.; Feldman, W.; Squyres, S.; Prettyman, T.; Bruckner, J.; Evans, L.; Reedy, R.; Starr, R.; Arnold, J.; Drake, D.; et al. Distribution of hydrogen in the near surface of Mars: Evidence for subsurface ice deposits. Science 2002, 297, 81–85.
- Mitrofanov, I.; Anfimov, D.; Kozyrev, A.; Litvak, M.; Sanin, A.; Tret’Yakov, V.; Krylov, A.; Shvetsov, V.; Boynton, W.V.; Shinohara, C.; et al. Maps of subsurface hydrogen from the high energy neutron detector, Mars Odyssey. Science 2002, 297, 78–81.
- Mitrofanov, I.; Malakhov, A.; Bakhtin, B.; Golovin, D.; Kozyrev, A.; Litvak, M.; Mokrousov, M.; Sanin, A.; Tretyakov, V.; Vostrukhin, A.; et al. Fine Resolution Epithermal Neutron Detector (FREND) Onboard the ExoMars Trace Gas Orbiter. Space Sci. Rev. 2018, 214, 86.
- Mitrofanov, I.; Malakhov, A.; Djachkova, M.; Golovin, D.; Litvak, M.; Mokrousov, M.; Sanin, A.; Svedhem, H.; Zelenyi, L. The evidence for unusually high hydrogen abundances in the central part of Valles Marineris on Mars. Icarus 2022, 374, 114805.
- Nikiforov, S.; Mitrofanov, I.; Litvak, M.; Lisov, D.; Djachkova, M.; Jun, I.; Tate, C.; Sanin, A. Assessment of water content in martian subsurface along the traverse of the Curiosity rover based on passive measurements of the DAN instrument. Icarus 2020, 346, 113818.
- Mitrofanov, I.G.; Litvak, M.L.; Varenikov, A.B.; Barmakov, Y.N.; Behar, A.; Bobrovnitsky, Y.I.; Bogolubov, E.P.; Boynton, W.V.; Harshman, K.; Kan, E.; et al. Dynamic Albedo of Neutrons (DAN) Experiment Onboard NASA’s Mars Science Laboratory. Space Sci. Rev. 2012, 170, 559–582.
- Busch, M.W.; Aharonson, O. Measuring subsurface water distribution using the Dynamic Albedo of Neutrons instrument on Mars Science Laboratory. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2008, 592, 393–399.
- Smith, P.; Tamppari, L.; Arvidson, R.; Bass, D.; Blaney, D.; Boynton, W.; Carswell, A.; Catling, D.; Clark, B.; Duck, T.; et al. Introduction to special section on the phoenix mission: Landing site characterization experiments, mission overviews, and expected science. J. Geophys. Res. Planets 2008, 113, E00A18.
- Rennó, N.O.; Bos, B.J.; Catling, D.; Clark, B.C.; Drube, L.; Fisher, D.; Goetz, W.; Hviid, S.F.; Keller, H.U.; Kok, J.F.; et al. Possible physical and thermodynamical evidence for liquid water at the Phoenix landing site. J. Geophys. Res. Planets 2009, 114, E00E03.
- Bibring, J.P.; Langevin, Y.; Gendrin, A.; Gondet, B.; Poulet, F.; Berthé, M.; Soufflot, A.; Arvidson, R.; Mangold, N.; Mustard, J.; et al. Mars surface diversity as revealed by the OMEGA/Mars Express observations. Science 2005, 307, 1576–1581.
- Nazari-Sharabian, M.; Aghababaei, M.; Karakouzian, M.; Karami, M. Water on Mars—A literature review. Galaxies 2020, 8, 40.
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E. Characteristics of the numerous and widespread recurring slope lineae (RSL) in Valles Marineris, Mars. Icarus 2017, 285, 195–210.
- Ojha, L.; Wilhelm, M.B.; Murchie, S.L.; McEwen, A.S.; Wray, J.J.; Hanley, J.; Massé, M.; Chojnacki, M. Spectral evidence for hydrated salts in recurring slope lineae on Mars. Nat. Geosci. 2015, 8, 829–832.
- Carter, J.; Poulet, F.; Bibring, J.P.; Mangold, N.; Murchie, S. Hydrous minerals on Mars as seen by the CRISM and OMEGA imaging spectrometers: Updated global view. J. Geophys. Res. Planets 2013, 118, 831–858.
- Sun, V.Z.; Milliken, R.E. Ancient and recent clay formation on Mars as revealed from a global survey of hydrous minerals in crater central peaks. J. Geophys. Res. Planets 2015, 120, 2293–2332.
- Wernicke, L.J.; Jakosky, B.M. Martian hydrated minerals: A significant water sink. J. Geophys. Res. Planets 2021, 126, e2019JE006351.