The transportation sector remains a major contributor to greenhouse gas emissions. The understanding of energy-efficient driving behaviors and utilization of energy-efficient driving strategies are essential to reduce vehicles’ fuel consumption. However, there is no comprehensive investigation into energy-efficient driving behaviors and strategies. Furthermore, many state-of-the-art AI models have been applied for the analysis of eco-friendly driving styles, but no overview is available. To fill the gap, this paper conducts a thorough literature review on ecological driving behaviors and styles, and analyzes the driving factors influencing energy consumption and state-of-the-art methodologies. With a thorough scoping review process, thirty-seven articles with full text were assessed, and the methodological and related data are compared. The results show that the factors that impact driving behaviors can be summarized into eleven features including speed, acceleration, deceleration, pedal, steering, gear, engine, distance, weather, traffic signal, and road parameters. This paper finds that supervised/unsupervised learning algorithms and reinforcement learning frameworks have been popularly used to model the vehicle’s energy consumption with multi-dimensional data. Furthermore, the literature shows that the driving data are collected from either simulators or real-world experiments, and the real-world data are mainly stored and transmitted by meters, controller area networks, onboard data services, smartphones, and additional sensors installed in the vehicle. Based on driving behavior factors, driver characteristics, and safety rules, this paper recommends nine energy-efficient driving styles including four guidelines for the drivers’ selection and adjustment of the vehicle parameters, three recommendations for the energy-efficient driving styles in different driving scenarios, and two subjective suggestions for different types of drivers and employers.
1. Introduction
The CO
2 emissions in the transportation sector form a significant component of the manmade greenhouse gas (GHG) which results in global warming through the greenhouse effect. While this sector gradually decarbonizes, it still contributes to almost 30% of GHG emissions [
1,
2], 65% of which are caused by road transport [
3]. Therefore, the strategies to improve fuel economy need to be studied to reduce CO
2 emissions.
Energy-efficient driving technology is an important factor in reducing vehicle fuel consumption. It refers to the decisions that a driver can make to improve the efficiency of the engine [
4]. These decisions could be multidimensional, involving vehicle selection [
5], route planning [
6], and driving behavior recommendation [
7]. Some industrial stakeholders, like the public transportation and logistics companies, already have enough vehicles, and the route should be planned based on not only the fuel economy, but also the work requirements and efficiency. The vehicle and route conditions can only be controlled by their manufacturers or constructors, and the drivers can only optimize their driving behaviors and styles to enhance energy efficiency. Therefore, driving behavior analysis is an important research domain to recommend the least fuel-consumption driving style in such industry sectors.
The relationship between fuel consumption and driving behavior has been a popular research topic recently with the development of artificial intelligence (AI) and machine learning (ML). The main factors representing and influencing driving behavior include velocity, acceleration, gear, road parameters, weather, etc., and the data can be collected through sensor networks and CANbus (controller area network) [
8]. With the ever-increasing volume of generated data, traditional models like linear regression cannot produce accurate estimation results in real-world applications [
9]. In recent years, many state-of-the-art machine learning (ML) (e.g., random forest [
10] and neural networks [
11]) and reinforcement learning (RL) [
12] models have been developed to perform research on energy consumption. Random forest is utilized in [
10] to classify the road types and more precise environment perception helps to enhance vehicle energy efficiency. The neural networks model is applied in [
11] to estimate the fuel consumption of three vehicles on distinct road conditions. The study in [
12] utilizes an RL model to generate energy-saving driving behaviors and integrates vision-perceptive methods to achieve higher energy efficiency. Meanwhile, some studies apply classification [
13] or clustering [
14] algorithms to find out the best practices in driving styles for fuel saving.
2. Energy-Efficient Driving
2.1. Overview of Energy-Efficient Driving Research
The energy-efficient driving technology represents the strategies to merge vehicle speed management approaches and GHG emission reduction techniques, aiming at minimizing fuel consumption [
50]. Of course, the benefits of energy-efficient driving go beyond energy saving. For one thing, the driving cost to the individuals and the companies can be reduced. For another, when developing energy-efficient driving strategies, safety conditions are also included, so as to reduce accidents and traffic fatalities [
51]. Hence, the goal of energy-efficient driving technology is to help the driver choose a CO
2-reduction driving strategy under some safety and law conditions [
50].
Recent research reveals that fuel consumption can be reduced by approximately 15% under different optimization approaches and various road conditions. The GMM model is employed in [
7] to learn different driving modes and the most energy-saving acceleration model is calculated to save up to 15.81% energy. The hybrid RL method proposed in [
12] reduces energy consumption by 12.70%. The developed data-driven optimal energy consumption cost model and optimal battery current model [
26] are, respectively, constructed via two neural networks and can improve fuel economy by up to 16.7%. There are different topics of energy-efficient driving deserving investigation, and distinct research aspects to optimize the energy-efficient driving strategies.
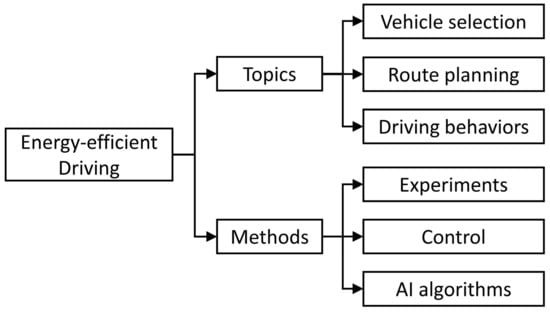
Figure 1 summarizes the research on energy-efficient driving, and they are analyzed in two parts in the following discussion, including the popular research topics and the applied technical methodologies.
Figure 1. Summarization of energy-efficient driving research.
As Figure 1 demonstrates, the main topics in energy-efficient driving research include vehicle selection, route planning, and driving behaviors.
In the studies of vehicle selection, the relationship between vehicle parameters, including mass, the tire–road friction coefficient, power train parameters, etc., are analyzed, and the structure of the vehicle is optimized to save fuel consumption. For instance, neural networks are employed to map the efficiency of a planetary gearbox for an electric vehicle based on powertrain data generated from the efficiency experiments and design an energy-efficient powertrain in [
52].
Vehicle route planning is another important study aspect. An energy-saving routing algorithm is capable of reducing the driving distance and frequency of acceleration/deceleration. A routing algorithm based on historical driving data to locate in energy-efficient routes is proposed by [
53], where 51.5% of energy is saved in the case study. Lastly, ecological driving behavior plays an important role in fuel saving through the proper control of gas/brake/clutch pedals [
54]. The driving-behavior prediction can guide the drivers to adjust the control style of the vehicle, avoiding inefficient driving.
2.2. Data Sources for Energy-Efficient Driving Research
Before modeling driving behavior and studying its impact on fuel consumption, it is significant to collect the vehicle and driver data in real-world conditions. There are various data sources of driving behaviors, including simulation tools, meters, CANbus, OBDs (on-board diagnostics), and smartphones, which are shown in Table 4.
Table 4. Data sources for energy-efficient driving.
| Data Sources |
Counts |
Ref. |
| Simulation data |
14 |
[21,27,28,29,36,37,38,39,40,41,42,44,45,46] |
| Embedded sensors |
Meters |
5 |
[14,22,26,30,47] |
| CANbus |
6 |
[13,22,23,35,43,49] |
| OBDs |
5 |
[7,11,12,31,33] |
| Smartphones |
2 |
[33,35] |
| Additional sensors |
9 |
[10,11,12,13,14,24,34,43,49] |
The easily implemented and efficient method is to collect data in the simulation environment so that multiple routes and climates can be set and multi-dimensional datasets are obtained easily. For instance, the driving performance data in a driving simulator is generated in [
21], and the driving behavior data in a networked game are collected and analyzed in [
56].
Although simulation data are easy to generate and abundant, they still differ from real-world data because some conditions might be simplified in the simulation systems.
The basic data collection method is to read the odometer and log the fuel use, mileage, and velocity manually. This method is relatively simple and cheap, but human errors may occur in the data recording [
4]. In addition, only a few observations and variables can be recorded manually, so the volume may not be big enough for big data analysis.
A more efficient data collection way is to utilize data loggers, which are plugged into CANbus and OBDs. CANbus is the controller area network bus, allowing microcontrollers to communicate with each other’s applications without a host computer [
58]. CANbus can provide detailed data concerning the running conditions of a vehicle, e.g., fuel consumption per second, real-time position, velocity, acceleration, and engine conditions. OBDs represent on-board diagnostic scanners and are usually connected to the engine control unit to provide real-time driving data [
59]. The data loggers connected to the CANbus and OBDs are allowed to collect real-time data during normal driving.
Furthermore, smartphones have been used for data collection recently. Many sensors and software (e.g., the GPS and the accelerometer) are equipped in smartphones, so they are capable of collecting most of the required data [
60]. The weather and road conditions are available online and collected via smartphones as well. The combination of smartphones and dataloggers in CANbus or OBDs fulfills almost all the requirements of the input datasets.
2.3. Variables Reflecting Energy Efficiency
To assess energy efficiency, different variables are selected and computed in distinct research. Table 5 shows the four variables regarding energy efficiency.
Table 5. Variables reflecting energy efficiency.
| Variables |
Units |
| Fuel consumption |
mL/s [13,49]
g [7]
L/km [8]
L/100 km [11,25,31,40]
gallon/mile [22]
mL [28,29,36]
kg [32]
gallon [44,45] |
| Electrical energy consumption |
Wh/km [10,23]
J [23]
kwh/100 km [14,48]
kwh [30,47]
Wh [37]
kJ/s [42] |
| Fuel economy |
km/L [24]
mile/gallon [39] |
| CO2 emissions |
g/km [21,48]
g/mile [22]
g [46] |
The variables are mainly divided into energy consumption and energy economy. Energy consumption signifies the amount of fuel or electricity a vehicle utilizes to cover a specific distance.
3.4. Factors Impacting Energy-Efficient Driving Behaviors
As Table 3 demonstrates, various variables of driving behavior are collected in different studies. Eleven main factors can be concluded based on the literature, and each includes various sub-variables. These factors can be divided into two groups: factors reflecting driving behavior and factors affecting driving behavior. The factors reflecting driving behavior include the speed, acceleration, deceleration, pedal, steering, gear selection, and engine, which are controlled by the drivers. The factors affecting driving behavior represent the objective vehicle and environmental parameters, involving distance, weather-, traffic signal-, and road conditions. Their definitions are shown in Table 6.
Table 6. Definitions of influencing factors of energy-efficient driving.
| Categories |
Influencing Factors |
Definition |
| Factors reflecting driving behaviors |
Speed |
real-time linear velocity of the vehicle |
| Acceleration |
real-time acceleration of the vehicle |
| Deceleration |
real-time deceleration of the vehicle |
| Pedal |
(gas/brake/clutch) pedal force, pedal frequency, and pedal depth |
| Steering |
angle of the rotating steering wheel |
| Gear |
selection of gear ratio of a manual vehicle |
| Engine |
engine load and engine speed |
| Factors impacting driving behaviors |
Distance |
distance between vehicles, distance from vehicle to the traffic light infrastructure and distance from vehicle to the station |
| Weather |
temperature, visibility, rainfall, and wind speed |
| Traffic signal |
traffic signal status generated from the infrastructures |
| Road |
road geometry, road slope and radius of the curve of the road |
An optimized engine control strategy is another significant approach for fuel saving through the speed selection of the transmission box and the control of pedal force and depth. The gear shift and pedal control can affect the energy efficiency of the engine [43].
Distance is the most popular research point that impacts driving behavior, which contains multiple features, including the distances to the traffic lights or the station and those between the vehicles in different scenarios and rules [12,29,32].
The combination of the mentioned features is also discussed in the literature. For instance, four types of influential variables including vehicle characteristics, driver characteristics, driving behavior, and weather conditions are summarized in [
8], and a fuel-consumption classification model based on the decision tree was established to train the generated datasets. The driving behavior data from the CANbus dataset and questionnaires is collected in [
23] with the velocity, acceleration, and steering wheel angle being generated from CANbus, while the questionnaire assembles the subjective driving characteristics (e.g., self-confidence, impatience, and rude driving behavior). The data from a driven vehicle, including the velocity, acceleration, pedal variables, engine parameters, road conditions, etc., are measured in [
25], and a real-time fuel consumption estimation method is proposed for recommending the optimal speed in time. Furthermore, a deep-learning framework is developed in [
11] to analyze the data from the OBD-II module and CANbus, where the input features include the velocity and engine parameters.
3.5. AI Models Applied in Energy-Efficient Driving Research
3.5.1. Prediction Models for Energy-Efficient Driving
The prediction models include regression and classification tasks. In regression tasks, the values of the target features (e.g., fuel consumption) are predicted by training a combination function based on the input variables [
21,
28]. In classification tasks, the driving styles are classified into several groups (e.g., energy-efficient and inefficient styles) [
33,
34]. Specifically, the unsupervised classification methods (the clustering methods) group the data based on their similarities [
35].
The linear regression family is the most popular model in the cases because it is a transparent and easy-implemented approach [
2,
7,
13,
18,
21,
23,
24,
25,
27,
40]. The contribution of each input variable can be recognized from the weights, allowing good mathematical interpretation [
61]. For instance, bivariate regression methods are used in [
13] to predict the relationships between each influencing factor and fuel consumption. The energy-efficient driving suggestions are made based on a series of regression lines. For example, the contributions of different energy-efficient driving rules to CO
2 emission reduction are measured through linear regression analysis in various scenarios in [
21].
3.5.2. Reinforcement Learning for Energy-Efficient Driving
Reinforcement learning (RL) is mainly used to optimize agents’ actions in an environment by repeated interactions to maximize the cumulative reward [
63,
64]. The establishment of an RL environment is typically based on the Markov decision process (MDP) which is a discrete-time stochastic control process [
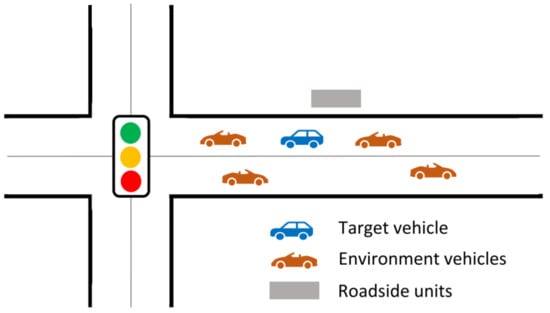
65]. An RL framework is agent-based, with the agent being the targeted vehicle whose fuel consumption is targeted to be minimized, and the surrounding vehicles, roads, signals, traffic rules, and other parameters constitute the environment [
36]. The general scenario is visualized in
Figure 4. The roadside units represent the facilities that affect the driving styles, including bus stations, schools, etc.
Figure 4. RL energy-efficient driving scenario.
Compared with other model-based simulation schemes, the RL-based energy-efficient driving method improves the accuracy and generalization [
4]. On one hand, other models can deal with specific driving scenarios like intersection passing and car following with their different analysis strategies.
This entry is adapted from the peer-reviewed paper 10.3390/en17020500