Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Developing appropriate signal timing strategies is a primary concern in traffic signal control; however, professionals are constrained by predefined controller options. Existing signal controllers in North America adhere to National Electrical Manufacturers Association (NEMA) standards with ring-barrier control (RBC) design.
- traffic signal controller
- traffic control logic
- signal logic
- event-based signal control
1. Introduction
In recent decades, the importance of traffic signal control systems has steadily increased due to ongoing urbanization and rising traffic congestion. Traffic signal control systems by controlling the flow of traffic at intersections and crosswalks reduce the occurrence and severity of accidents [1], minimize travel time [2], and enhance air quality by curbing emissions from idling vehicles [3][4]. In alignment with the World Health Organization on road safety, implementing robust traffic signal control systems is crucial for promoting safer road conditions [5]. Traffic signal control is the most frequently utilized approach to handle requests, efficiently and safely, for the right-of-way of road users (private vehicles, buses, bikes, pedestrians), both spatially and temporally [6].
Diverse road users, including pedestrians, transit, and emergency vehicles, often come with unique conditions and conflicting priority requests. Meeting these demands requires the incorporation of additional rules and strategies (e.g., traffic signal preemption or priority) within the existing constraints and built-in algorithms of the traffic signal control frameworks. For example, real-time actuation of side street passenger cars may conflict with system-wide signal coordination. Similarly, a request by a pedestrian to cross the street may interfere with well-established coordination enabling the seamless arrival of the platoon of vehicles at the next intersection. A suitable traffic control algorithm should have the capability to, first, control traffic signals with maximum flexibility, and second, offer an efficient method for signal professionals to leverage their expert knowledge in programming such control algorithms. However, it is challenging to achieve these two aspects within the functionalities of the current controllers. The main reason is attributed to the interconnection between traffic signal flexibility and the increasing need to regulate the outcomes of this flexibility (e.g., to prevent critical situations, such as potential conflicts in traffic movements). Consequently, this can lead to an increase in the programming and maintenance efforts of such systems, ultimately resulting in a decline in overall programming efficiency. To mitigate this issue, two categories of traffic signal control frameworks can be identified:
-
Signal Stage-Based Traffic Control: This approach relies on the concepts of “signal stages” and “signal interstages” as the minimal units available for manipulation in traffic signal control algorithms [7]. The control algorithm is typically represented as a flowchart that dictates when and which stage (and interstage) should be activated based on various conditions (e.g., detector status, time conditions, etc.). While this method allows signal professionals to control and verify the algorithm results, the inherent restrictions on signal manipulation for different movements can limit flexibility (e.g., the compatibility between all phases in an interval is predetermined and cannot be changed after, even the compatible phases cannot be redefined).
-
Signal Group-Based Traffic Control: This approach, based on manufacturer-specific concepts, facilitates more direct manipulation of signals for a group of movements (signal groups) in traffic signal control algorithms. Representative examples include the signal timing interval-based control frameworks (e.g., VS-PLUS), where the signal timing plan is defined by specifying time points and intervals for traffic signal activation by the control algorithm, and the ring-barrier control (RBC) framework (the National Electrical Manufacturers Association (NEMA) standard controllers based on the concept of ring-and-barrier design [8]). This category aims to overcome the limitations associated with signal stages by increasing flexibility in signal manipulation for various movements. However, it is limited mostly to the built-in algorithms.
In North America, signal timing follows the standardized NEMA method for assigning signal phases to traffic movements [3]. Most intersections use the standard eight phases shown in Figure 1. Figure 1b displays an RBC diagram for the intersection shown in Figure 1a, emphasizing the constraint of signal phasing within rings and barriers. Consequently, signal professionals face restricted flexibility in devising and implementing traffic control logic customized for specific traffic conditions and special requests (such as granting special priority to public transit, bicycles, and pedestrians) within the fundamental functionalities of NEMA controllers. Notably, minimal research has been conducted to explore the new capabilities of modern NEMA controllers, including built-in logic and peer-to-peer communications to customize signal operations and enhance traffic signal control flexibility [9][10]. Nevertheless, despite the presence of logic processors, it is challenging to consider it as a comprehensive tool for creating high-level “flow-chart”-like algorithms.
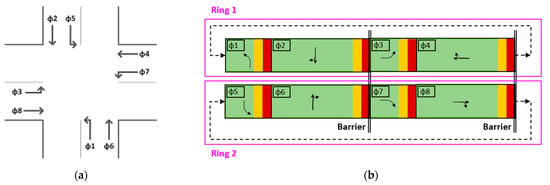
Figure 1. (a) NEMA phasing for a typical 4-way intersection; (b) standard ring-and-barrier diagram for the corresponding 4-way intersection.
Furthermore, flexibility alone is insufficient for achieving efficiency within such a system. It is crucial to consider the cost associated with this flexibility, specifically evaluating the effort required for a practitioner to program, test, and, if needed, modify the operational algorithm during the ongoing exploitation process. Considering the differences in the geometric layout, complex fluctuating traffic patterns at the intersections, and conflicting priority requests from multimodal users, existing controllers are not always flexible and/or efficient enough to address the challenges at intersections and provide the highest efficiency in multimodal operations and uncommon traffic conditions.
2. Overview and Modeling Capabilities of an Event-Based Signal Controller
Today, a wide range of hardware and software alternatives are available to transportation engineers or control system designers for creating alternative traffic control systems. In North America, signal timing follows the standardized NEMA method for assigning signal phases to traffic movements [3]. While NEMA controllers operate with predetermined signal control parameters, some adjustments can be made during the day/year. They are programmed firstly by providing schedules (e.g., time of day plans in a feature called “pattern”). Within patterns, through some parameters such as vehicle extension timers, duration of green, etc., some changes could be achieved. The same process is carried out in a simulation, where the RBC is often a default emulator for standard signal controller logic (e.g., in Vissim) [11]. Some limitations of the early versions of RBC controllers in Vissim have been recently addressed by providing the ability to modify controller parameters during the run time [12].
A couple of studies employed the ASC/3 logic processor to manage built-in traffic signal priority (TSP) during conflicting requests and to create custom TSP strategies independent of the built-in functionality. The same group of researchers has employed the logic control processor to handle conflicting transit signal priority requests, particularly for bus rapid transit (BRT) or light rail transit (LRT) systems [13][14]. In other studies, real-time predictive priority setting is achieved using overlap intersection phasing through a series of logical commands set within the Siemens NextPhase traffic controllers [15][16].
Researchers have already recognized (and addressed) the fact that conventional signal controllers do not easily provide enough flexibility to address all the necessities of any intersection with different conditions and needs. For example, in the context of bicyclists and pedestrians, Furth et al. investigated a phasing system known as “protected-yet concurrent phasing”, in which right turns have their phase and bike and pedestrian crossings operate in their own separate phases simultaneously with the parallel traffic phase [17]. Based on another paper from the same authors, traditional phasing methods permit conflicts with right-turning traffic either throughout the entire crossing phase or not at all [18]. Therefore, they addressed this gap by comparing two signalization techniques, providing a short, conflict-free interval for crossing pedestrians and bikes. In another recent study, researchers focused on the lack of flexibility for a fully actuated coordination strategy and recognized that the default operations of the coordinated phase are rarely modified in practice [19]. In another study, the authors developed a new signal control approach, allowing pedestrian overlap phases with vehicles using barrier-free ring structures. While the RBC serves as a valuable simplification for typical intersection layouts, it can also be constraining when a movement on one side of a barrier conflicts with some, but not all, of the movements on the other side, creating unnecessary delay to those movements. Evaluations found the use of pedestrian overlaps can significantly reduce pedestrian delays compared to basic traditional signal control [20]. This limitation cannot be addressed within the fundamental structure of RBC unless introducing additional phases and overlap phasing [21]. They proposed a new strategy aiming to combine uncoordinated with coordinated control in low to medium traffic while the coordination cycle is long. Additionally, Gavric et al. introduced two novel pedestrian timing treatments utilizing the EBC concept, which accommodates pedestrian timing within the cycle length optimized for vehicular phases. These pedestrian treatments are relevant for pretimed fixed signal timing plans where only pedestrian calls are actuated [22].
Several other approaches have been proposed to design and implement innovative signal control systems to address the limitations of the commonly available traffic control systems. For the first time, Pappis and Mamdani proposed the application of a fuzzy logic controller (FLC) to control traffic characterized by randomness [23]. The findings of their implementation of an FLC at a single intersection of two one-way streets demonstrated that the system performs better with a fuzzy logic controller over an effective conventional vehicle-actuated controller. Nakatsuyama et al. introduced the phase (offset) controller, employing fuzzy control statements to control adjacent chains of intersections with one-way movements [24]. This controller determines when the green signal for the downstream intersection should be terminated depending on the demand from the upstream intersection. For the first time, Chiu applied fuzzy logic to control multiple intersections in a network of two-way streets without turning movements to adjust the cycle time, phase split, and offset parameters based on the degree of saturation on each intersection approach [25]. More studies have been conducted using a fuzzy logic-based controller, focusing on phase sequence controllers for traffic control systems, controlling the timing of a pedestrian crossing signal, determining whether to extend or terminate the current signal phase, freeway adaptive ramp metering, and controlling the diverging diamond interchange [26][27][28].
This entry is adapted from the peer-reviewed paper 10.3390/sym16020157
References
- Retting, R.A.; Chapline, J.F.; Williams, A.F. Changes in crash risk following re-timing of traffic signal change intervals. Acid. Anal. Prev. 2002, 34, 215–220.
- Zegeye, S.K.; De Schutter, B.; Hell, H. Reduction of travel times and traffic emissions using model predictive control. In Proceedings of the American Control Conference, St. Louis, MO, USA, 10–12 June 2009.
- Koonce, P.; Rodegerdts, L. Traffic Signal Timing Manual; FHWA-HOP-08-024; Federal Highway Administration: Washington, DC, USA, 2008.
- Lin, S.; De Schutter, B.; Xi, Y.; Hellend, H. Integrated Urban Traffic Control for the Reduction of Travel Delays and Emissions. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1609–1619.
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2019.
- Park, B.; Yun, I.; Ahn, K. Stochastic Optimization for Sustainable Traffic Signal Control. Int. J. Sustain. Transp. 2009, 3, 263–284.
- Urbanik, T.; Beaird, S.; Gettman, D.; Head, L.; Bullock, D.; Smaglik, E.; Campbell, R.; Ablett, M. Traffic Signal State Transition Logic Using Enhanced Sensor Information; National Cooperative Highway Research Program Transportation Research Board: Washington, DC, USA, 2003.
- He, Q.; Head, K.L.; Ding, J. Multi-modal traffic signal control with priority, signal actuation and coordination. Transp. Res. Part C 2014, 46, 65–82.
- Luker, M.; Signal Controller Peer-to-Peer Communications. 16 January 2016. Available online: https://docs.lib.purdue.edu/atspmw/2016/Presentations/9/ (accessed on 22 November 2023).
- Johnson, J. ASC/3 Logic Processor Programming. Econolite, Reference: AN2068, 2007. Available online: http://www.signalcontrol.com/tech_papers/econolite/AN2068%20ASC3%20Logic%20Processor%20Programming.pdf (accessed on 28 November 2023).
- PTV Group. Ring Barrier Controller (RBC) User Manual Vissim; PTV Group: Karlsruhe, Germany, 2014.
- Wang, Q. Street Traffic Signal Optimal Control for NEMA Controllers. Doctoral Dissertation, Virginia Polytechnic Institute and State University, Blacksburgh, VA, USA, 2019.
- Zlatkovic, M.; Stevanovic, A.; Martin, P.; Tasic, I. Evaluation of Transit Signal Priority Options for Future Bus Rapid Transit Line in West Valley City, Utah. Transp. Res. Rec. 2012, 2311, 176–185.
- Zlatkovic, M.; Stevanovic, A.; Martin, P.T. Development and Evaluation of Algorithm for Resolution of Conflicting Transit Signal Priority Requests. Transp. Res. Rec. 2012, 2311, 167–175.
- Zlatkovic, M.; Stevanovic, A.; Zhou, X.; Tasic, I.; Ostojic, M. 400 South Corridor Assessment; Mountain-Plains Region; University Transportation Center sponsored by the U.S. Department of Transportation: Washington, DC, USA, 2017.
- Zlatkovic, M.; Martin, P.T.; Stevanovic, A. Predictive Priority for Light Rail Transit. Transp. Res. Rec. J. Transp. Res. Board 2011, 2259, 168–178.
- Furth, P.G.; Koonce, P.J.; Miao, Y.; Peng, F. Mitigating Right-Turn Conflict with Protected Yet Concurrent Phasing for Cycle Track and Pedestrian Crossings. Transp. Res. Rec. 2014, 2438, 81–88.
- Furth, P.G.; Razavi, S. Leading Through Intervals versus Leading Pedestrian Intervals: More Protection with Less Capacity Impact. Transp. Res. Rec. 2019, 2673, 152–164.
- Wang, A.; Tian, Z. Leveraging Fully Actuated Signal Coordination and Phase Reservice to Facilitate Signal Timing Practices. Transp. Res. Rec. 2022, 2677, 240–251.
- Furth, P.; Muller, T.H.; Salomons, M.; Bertulis, T.; Koonce, P.J. Barrier-Free Ring Structures and Pedestrian Overlaps in Signalized Intersection Control. Transp. Res. Rec. 2012, 2311, 132–141.
- Zlatkovic, M.; Kergaye, C. Development of crash modification factors for continuous flow intersections. J. Road Traffic Eng. 2018, 64, 5–11.
- Gavric, S.; Sarazhinsky, D.; Stevanovic, A.; Dobrota, N. Development and Evaluation of Non-traditional Pedestrian Timing Treatments for Coordinated Signalized Intersections. Transp. Res. Rec. 2022, 2677, 460–474.
- Pappis, C.P.; Mamdani, E.H. A Fuzzy Logic Controller for a Trafc Junction. IEEE Trans. Syst. Man, Cybern. 1977, 7, 707–717.
- Nakatsuyama, H.; Nishizuka, N.N. Fuzzy Logic Phase Controller for Traffic Junctions in the One-way Arterial Road. IFAC Proc. Vol. 1984, 17, 2865–2870.
- Chiu, S. Adaptive traffic signal control using fuzzy logic. In Proceedings of the Intelligent Vehicles ‘92 Symposium, Detroit, MI, USA, 29 June–1 July 1992.
- Beauchamp-Baez, G.; Rodriguez-Morales, E. A Fuzzy Logic Based Phase Controller for Traffic Control. In Proceedings of the 6th International Fuzzy Systems Conference, Barcelona, Spain, 5 July 1997.
- Niittymaki, J.; Kikuchi, S. Application of Fuzzy Logic to the Control of a Pedestrian Crossing Signal. Transp. Res. Rec. 1998, 1651, 30–38.
- Murat, Y.S.; Cakici, Z.; Yaslan, G. Use of Fuzzy Logic Traffic Signal Control Approach as Dual Lane Ramp Metering Model for Freeways. In Soft Computing in Industrial Applications; Springer: Cham, Switzerland, 2014.
This entry is offline, you can click here to edit this entry!