Forest fires are a significant environmental threat, causing loss of biodiversity, alteration of ecosystems, and impacting human lives and properties. Early detection is critical for effective firefighting and minimizing damages. Smoke detection plays an indispensable role in the early monitoring of forest fires. Its rapid dispersion, visibility, and integration with contemporary sensor technologies render it not only an effective complement but also a potential substitute for flame monitoring. In this context, various forest fire smoke detection methods and systems have been developed. These methods include satellite-based smoke detection, ground-based sensors for smoke detection, and UAV-based detection, each with its unique approach, advantages, and limitations. Moreover, image processing technology occupies a crucial position in the detection of forest fire smoke.
1. Introduction
In recent years, forest fires have been listed among the most devastating and prevalent natural disasters worldwide, characterized by their abruptness, immense destructiveness, extensive scope of harm, and challenges in emergency rescue operations [
1,
2]. From a macroscopic perspective, forest fires have the potential to cause substantial economic and societal losses. In the event of a major forest fire comparable to the 2020 Australian forest fires, the economic losses are projected to surpass billions of US dollars, not to mention the loss of lives of firefighters and civilians and the detriment to the development prospects and values of the affected areas [
3]. From a microscopic standpoint, forest fires pose a threat to the habitat of numerous wildlife species and plants, resulting in the endangerment of additional species. Furthermore, the primary components of smoke emitted by forest fires include water and carbon dioxide. The substantial release of carbon dioxide not only threatens the crucial forest carbon sink [
4], but also elevates global warming [
5]. Consequently, the prevention of forest fires holds tremendous significance.
Given the rapid spread of forest fires in areas with abundant oxygen and swift airflow, early detection plays a critical role. Traditional manual inspection techniques for forest fire detection have proven to be inefficient and costly, prompting a shift towards sensor-based methods and satellite remote sensing. Smoke, gas, temperature, humidity, and integrated sensors are commonly employed to detect fires by measuring environmental parameters [
6,
7,
8]. However, in order to analyze these parameters, sensors must directly sample combustion byproducts, necessitating their close proximity to potential fire sources. While sensor-based detection systems are well-suited for identifying fires within confined indoor spaces, they may not be suitable for vast areas or open spaces like forests due to installation costs, maintenance requirements, and power limitations. On the other hand, satellite remote sensing is effective in detecting large-scale forest fires but is constrained in identifying initial small fires due to weather conditions and cloud cover [
9].
Cameras are ubiquitous and widely utilized for object detection and target tracking [
10]. Numerous approaches have been proposed for detecting fire or smoke using conventional video surveillance cameras. When mounted on UAVs, such cameras can also detect forest fires in remote areas [
11,
12,
13]. Extensive research has been conducted on vision-based fire detection.
The identification of forest fires primarily encompasses smoke identification and flame identification. Smoke generally propagates more rapidly than the flames [
14]. Smoke-based method relies on examining specific characteristics associated with forest fires smoke. Smoke serves as both a precursor and a byproduct of forest fire. This phenomenon is particularly evident and pronounced during the initial stages of a forest fire. During the early stages of forest fires, smoke often rises above the forest and disperses over a wide area. This phenomenon makes it more feasible to detect such forest fires using UAVs [
15]. Moreover, the smoke plume generated by a forest fire propagates over long distances and lingers in the atmosphere for extended periods, exhibiting limited dispersion. Smoke is an important sign for early fire detection because it spreads faster than flames and moves over a wide area [
16].
Monitoring smoke enables the early detection of forest fires and provides information for predicting their developmental trends. Mounting cameras on drones for forest fire detection has emerged as the most promising technology, integrating remote sensing and various deep learning-based computer vision technologies [
17,
18]. Traditional video-based forest fire identification does not predict early fires with ease due to the challenging forest environment and constrained circuit ranges and difficulties in camera deployment. Moreover, the coverage of a single camera is limited. Fire detection in large-scale forest environments would necessitate substantial investments in financial, material, and human resources. At present, technology falls short of providing comprehensive camera coverage across entire forests. Fortunately, the development of UAVs has attained a more mature stage, while video, image, and image processing technologies continue to advance [
19,
20]. UAV-based image analysis for forest fire smoke detection systems can effectively conduct inspections of mountains and forests [
21,
22,
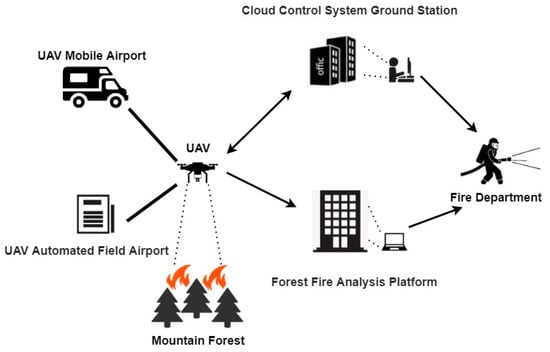
23]. The UAV’s camera captures images or videos of the mountains and forests, eliminating the cumbersome process of camera deployment and reducing the allocation of manpower, material resources, and financial resources. Real-time monitoring in the early stages of forest fire smoke becomes feasible, enabling the timely conveyance of valuable information to relevant authorities [
24,
25]. The framework of a fully automated UAV-based forest fire smoke detection system is depicted in
Figure 1.
Figure 1. Overview of the UAV-based forest fire smoke detection procedure.
2. Comprehensive Approaches for Forest Fire Smoke Detection
Satellite-based smoke detection refers to the use of satellites to detect and monitor smoke plumes resulting from forest fires. These systems typically employ remote sensing technologies, utilizing sensors that can capture data in various spectrums, including optical [
34] and thermal [
35]. By leveraging space-based technologies, these systems provide a unique vantage point for detecting and monitoring smoke from forest fires on a global scale. These satellite-based smoke detection systems offer invaluable benefits in forest fire management, especially in terms of wide-area coverage and the potential for early detection. However, they are not without limitations, such as susceptibility to atmospheric conditions and resolution constraints. The ongoing advancements in technology, particularly in AI and machine learning, are set to mitigate these limitations and further enhance the effectiveness of these systems.
Ground-based sensors designed for smoke detection consist of various sensor types strategically deployed in forest areas. These networks primarily focus on detecting smoke particles, a critical early indicator of forest fires. Optical smoke detectors, which operate on light-scattering principles, and ionization detectors for detecting ion concentration changes due to smoke, are commonly used [
36,
37]. Additionally, sensors for particulate matter, carbon monoxide, and carbon dioxide are incorporated for enhanced detection accuracy [
38]. Kadir et al. [
39] integrated commonly used sensors for fire detection, such as temperature, smoke, haze, and carbon dioxide, to determine the location and intensity of fire hotspots. This multi-sensor approach yields more accurate results than using a single sensor. Ground-based sensor networks are typically wired systems with fixed sites, making their deployment and connection relatively complex. Building upon this, some scholars have researched wireless sensor networks (WSNs), which operate through interconnected wireless communication nodes, thereby offering greater flexibility in terms of deployment and coverage area. Wireless sensor networks (WSNs) consisting of interconnected sensors capable of detecting temperature, smoke, and changes in humidity have been increasingly used for early forest fire smoke detection. Benzekri et al. [
40] proposed an early forest fire detection system based on wireless sensor networks (WSNs), which collects environmental data from sensors distributed within the forest and employs artificial intelligence models to predict the occurrence of a forest fire. These sensors and networks offer continuous monitoring and can provide valuable data for fire prediction models. Nonetheless, maintenance and energy consumption are challenging aspects of ground-based sensors.
Over the past decade, UAVs have seen an increase in their utilization due to their advantages, such as flexibility, high resolution, and the quality of data acquired. UAVs equipped with sensors and cameras offer a promising approach for forest fire detection. These UAVs, outfitted with cameras, are adept at obtaining visual evidence of smoke and flames in treacherous terrains. Yuan et al. [
41] proposed a method for automatically detecting forest fires in infrared images using UAVs. This algorithm employs brightness and motion cues, combining image processing techniques based on histogram segmentation and the optical flow method for flame pixel detection. Complementing this, the integration of specialized gas sensors [
42,
43], such as those for detecting carbon dioxide or carbon monoxide, enhances UAVs’ capability to discern and scrutinize the constituents of smoke. These systems offer real-time data and high-resolution imagery and can access remote areas. However, UAVs, characterized by their high-speed mobility and varying distances of capture, often pose challenges for existing algorithms, such as difficulties in recognizing small target smoke and distinguishing between target and background.
To achieve faster and more accurate forest fire smoke detection, some scholars have proposed the integration of multiple technologies to form comprehensive systems. Integrated systems combining various technologies, such as satellite imagery, UAVs, sensor networks, and image processing algorithms, are being explored to create comprehensive fire detection systems. Peruzzi et al. [
44] proposed an integrated fire detection system based on audio and visual sensors, utilizing two embedded machine learning (ML) algorithms running on low-power devices to identify and transmit the presence of forest fires. Muid et al. [
45] employed ground-based sensors and UAVs for forest fire detection and monitoring, successfully collecting images and weather-related parameters from forests and plains through an integrated system, thus playing a role in monitoring. These methods are effective but can face delays in data processing and transmission. Also, outdoor sensors may need regular maintenance and could have durability issues.
The amalgamation of UAV technology with cutting-edge image processing methods has emerged as a current trend of significant interest. This integration capitalizes on the UAVs’ capability to swiftly reach remote or otherwise inaccessible areas, while simultaneously employing advanced and superior image processing techniques to achieve the real-time and precise detection of forest fire smoke. However, the challenges of detecting small targets amidst complex backgrounds in smoke detection tasks impose stringent demands on the performance of image processing algorithms employed in UAV-based smoke detection. Additionally, distinguishing actual smoke from objects that resemble smoke presents a significant hurdle. Therefore, image processing algorithms applied in UAV-based smoke detection are of paramount importance.
3. Image Processing Approaches for Smoke Detection
The development of image processing algorithms has enabled the detection of forest fires through cameras and other visual data sources. Techniques such as color analysis, motion detection, and smoke pattern recognition are employed. However, these methods can be prone to false alarms due to environmental factors, like fog or dust. In response to this, numerous experts have conducted various studies. Smoke detection methods based on image processing primarily fall into two categories: traditional image processing techniques and deep learning-based image processing approaches.
3.1. Conventional Image Processing Approaches
Conventional image processing for smoke detection methods primarily rely on the spectral characteristics of smoke. These methods include visual interpretation, multi-threshold techniques, pattern recognition algorithms, and other similar methods. Visual interpretation employs three spectral bands of a satellite sensor, representing red, green, and blue channels, to generate true-color or false-color composite images, enabling manual visual discrimination of smoke. For instance, the true-color RGB imagery synthesized from MODIS bands 1, 4, and 3 has been used in conjunction with the false-color imagery composed of bands 7, 5, and 6 [
46]. For seasoned individuals, visual interpretation serves as an effective technique for identifying smoke. However, this method has a significant drawback in that it cannot automatically process vast amounts of data. The multi-threshold method retrieves the localized optimal thresholds of reflectance or brightness temperature (BT) from established spectral bands based on historical data. These thresholds are subsequently amalgamated to eliminate cloud classes and certain ground objects, ultimately enabling the identification of smoke. For example, Li et al. [
47] proposed a targeted identification approach using Himawari-8 satellite data, incorporating a connectivity domain distance weight based on multi-threshold discrimination to detect fog beneath clouds. This method exhibits high accuracy in the detection of sea and land fogs and, with limited error introduction, can effectively discern some instances of fog beneath clouds. While this approach can be effective in local areas, it poses challenges in determining the optimal threshold due to the variability of spatio-temporal information. As a result, small smoke ranges are prone to being overlooked, leading to a decrease in the promptness of fire alarms. In addition, Jang et al. [
48] analyzed the variations in light scattering distributions of different colored smokes, assessing the color classification methods of smoke particles entering the smoke detectors to extract color information from the smoke, enabling the detection of fire smoke. Nevertheless, this approach overlooks the fact that certain smoke colors (such as black or gray) resemble the background environment (e.g., clouds and dust). The smoke detection method that uses a pattern recognition algorithm is an image processing technique that leverages the spectral features of smoke and typical ground objects to categorize smoke images and identify smoke pixels. Asiri et al. [
49] developed a new feature space to represent visual descriptors extracted from video frames in an unsupervised manner. This mapping aims to provide better differentiation between smoke-free images and those depicting smoke patterns. This method employed training samples from a few classes, such as cloud and water, in addition to smoke. Despite its utility, the effectiveness and applicability of these smoke detection methods may be diminished when applied to diverse and intricate categories found in UAV imagery. This limitation becomes particularly evident in areas such as mountains and forests, where only a limited number of standard ground object categories are taken into account.
Most conventional image-based smoke detection algorithms utilize a pattern identification process that involves manual feature extraction and classification, where features are manually extracted and recognizers are designed. Following the extraction of candidate regions, static and dynamic smoke features are employed for smoke identification. Extracting the most crucial smoke features is challenging, and the detection process is relatively sluggish.
3.2. Deep Learning-Based Image Processing Approaches
In recent years, the domain of deep learning has witnessed notable advancements owing to progress in hardware capabilities, the capacity to handle extensive datasets, and substantial enhancements in network architectures and training methodologies. Deep learning-based smoke detection algorithms can be classified into two-stage methods and one-stage methods. Two-stage methods include well-known representatives, such as R-CNN [
28] and Faster R-CNN [
26]. On the other hand, one-stage methods are exemplified by algorithms like SSD [
27] and the YOLO series [
29,
30,
31,
32]. The development of these deep learning technologies has provided a solid foundation and technical support for UAV-based forest fire smoke detection.
3.3. Deep Learning-Based Approaches for UAV-Based Smoke Detection
Numerous deep learning-based techniques have been utilized to discern smoke in UAV-based scenarios. Alexandrov et al. [
50] employed two one-stage detectors (SSD and YOLOv2) as well as a two-stage detector (Faster R-CNN) for smoke detection purposes. YOLOv2 outperformed Faster R-CNN, SSD, and traditional hand-crafted methods when evaluated against a large dataset of genuine and simulated images. Ghali et al. [
51] introduced a novel approach based on model ensemble, combining EfficientNet and DenseNet for accurately identifying and classifying forest fire smoke with UAV-based imagery. Mukhiddinov et al. [
52] proposed an early detection system for forest fire smoke using UAV imagery, employing an enhanced variant of YOLOv5. Additionally, several methods for small target detection in UAV-based settings have been proposed. Zhou et al. [
53] devised a small-object detector tailored specifically for UAV-based imagery, where the YOLOv4 backbone was modified to accommodate the characteristics of small-object detection. This adaptation, combined with adjustments made to the positioning loss function, yielded improved performance in small-object localization. Jiao et al. [
54] proposed a UAV aerial image forest fire detection algorithm based on YOLOv3. Initially, a UAV platform for forest fire detection was developed; subsequently, leveraging the available computational power of the onboard hardware, a scaled-down Convolutional Neural Network (CNN) was implemented utilizing YOLOv3. While these approaches demonstrate promising outcomes in object detection, they have yet to integrate real-time capabilities with high accuracy in the realm of forest fire smoke detection. Xiao et al. [
55] introduced FL-YOLOv7, a lightweight model for small-target forest fire detection. By designing lightweight modules and incorporating Adaptive Spatial Feature Fusion (ASFF), they enhanced the model’s capability to detect targets of various scales and its real-time performance. However, this method did not specifically target improvements for small-scale objects but rather improved the overall accuracy of evaluation results through feature fusion. Additionally, the evaluation metrics presented in their study were limited, lacking differentiated assessment indicators for targets of varying scales.
This entry is adapted from the peer-reviewed paper 10.3390/rs15235527