Pressure sensor chips embodied in very tiny packages are deployed in a wide range of advanced applications. Examples of them range from industrial to altitude location services. They are also becoming increasingly pervasive in many other fields, ranging from industrial to military to consumer. However, these sensors, which are very cheap to manufacture in silicon, are strongly affected by thermal, mechanical and environmental stresses, which ultimately affect their measurement accuracy in the form of variations in gain, hysteresis, and nonlinear responses. To compensate induced drift in measurements, several neural networks were devised and be applied to stresses caused by two thermal cycles: 260 C for 10-40 seconds (JEDEC soldering procedure) and 100 C for two hours. These models were characterized in accuracy and deployability on tiny embedded devices and improved accuracy was observed.
1. Introduction
In the current era of IoT, Industry 4.0, localization services, and humanoid robotics, pressure sensors are essential enablers. They are deployed in a wide range of compelling applications, including altitude localizers, industrial, biomedical, automotive, robotics, wearable, home, AV/VR, GPS, drones, e-cigarettes, gas metering, and many more appliances. The associated market size is currently valued at USD 18.73 billion, and it is expected to grow at a compound annual growth rate (CAGR) of 4.3% between 2023 and 2030, according to [
1].
State of the art pressure sensors are based on tiny, cheap, and long-lasting micro-electro-mechanical systems (MEMS) technology [
2], which leverages the mechanical response of a mobile element set to produce an accurate electrical signal through an analog and digital signal processing pipeline. More specifically, MEMS pressure sensors feature a silicon membrane, which, when pressure is applied, deflects. This induces an imbalance in the Wheatstone bridge piezoresistance [
3]. Next, the output signal is used to infer the pressure measurement.
Temperature sensors, usually, are super-integrated with pressure sensors in the same sensor package. Unfortunately it is rare that this measure is available at the output of the sensor’s interfaces to the external world. Pressure and temperature measurements are natively analog, processed as such, and then A/D converted. This allows them to be communicated to an external microprocessor (MPU) or controller unit (MCU) for further processing. In many applications, MEMS-based pressure sensors are required to provide accurate, reliable, and high-confidence measurements. This is particularly true for altitude location-based services in which pressure is used to infer the sensor’s altitude to locate the sensor’s owner in a building. For this purpose, they are factory-calibrated once and immediately after they are signed off. During their deployment, however, pressure sensors experience a broad range of stress conditions, which ultimately affect their measurements in the form of variations in gain, hysteresis, and sensitivity [
4,
5].
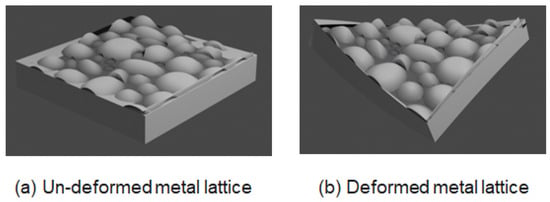
Drops in supply voltage, exposure to high temperatures for short or long periods, different operating temperatures, and exposure to soldering are the factors causing the sensor to experience drift from its nominal behavior. For example, the grains created by metal nucleation during the deposition process inside the sensor impact the metal alloy’s stabilization by deforming the lattice. In turn, as shown in Figure 1, this creates non-reversible thermoplastic hysteresis effects on the pressure measurements for a quite long time. These events are responsible for consistently degrading the accuracy of the sensor readings.
Figure 1. (a) The sensor’s metal lattice before thermal stresses; (b) the sensor’s metal lattice deformed by the thermal stresses. Metal grains are displaced with respect to the original placement, causing hysteresis in the measurements.
Therefore, drift compensation is needed to mitigate these systematic and time-varying errors. Errors could be either random or systematic. The former are not addressed herein. The focus is on the compensation of systematic errors, and, more specifically, the errors caused by two factors: the inevitable soldering of the sensor on a motherboard during, for example, smartphone manufacturing, and the long-term exposure of the sensor to moderately high temperatures during its deployment in the field and in a smartphone.
It is evident that calibration should not be performed only once during manufacturing. Instead, it should be continuously performed during the entire deployment life of the pressure sensor. However, this could be prohibitive, costly, complex, and time-consuming to realize in practice. Indeed, the most common, fast to achieve during manufacturing, and low-complexity technique to implement calibration is called One Point Calibration (OPC). It takes a measurement from the sensor at 25 °C and compares it with the measurement from a reference, highly accurate (and very costly) barometer. Then, the calibration offset is computed by subtracting the sensor’s reading from the reference. During successive (in time) measurements, the offset will be added to the sensor readings in order to compute the calibrated, error-free, value. OPC computes a non-time-varying offset in a precise environmental condition and in one instant of time, which cannot be scaled or generalized to other conditions that are encountered by the sensor during its lifetime. A method like OPC has a major drawback: it requires frequent offset re-computation and the availability of a reference barometer. Indeed, OPC assumes the calibration error to be constant or linearly varying over time, which is usually not representative of the real case. A more efficient alternative to OPC is based on machine learning (ML) and deep learning (DL) techniques. The training procedures of ML/DL models take advantage of the reference barometer to generate training data. Once these models are trained and deployed, the pressure sensor will be able to predict nonlinear and time-varying compensations for pressure measurements via the ML/DL inferences.
2. Pressure Sensor for Vertical Position Localization
Pressure sensors are instrumental in estimating smartphones’ vertical positions in many application scenarios. The inverse relationship between air pressure variations with respect to the altitude allows one to localize it vertically, as described by [
12]. These sensors, which lack any horizontal estimation capability, offer unique advantages (e.g., cost, simplicity, small form factor, μW power consumption) compared to Global Positioning Systems (GPS). GPS devices, which are commonly used in providing vertical location information too, are challenged in their accuracy, as highlighted in [
13].
One life-saving application is floor level localization in buildings for people rescue under emergencies (e.g., fires, earthquakes, etc.). Current response systems often struggle to accurately locate individuals on a specific floor in a building based solely on voice indications provided during an emergency call.
Other than emergency situations, indoor navigation systems benefit significantly from accurate vertical position estimation, enabling seamless movement through expansive and intricate indoor spaces. Therefore, with such an approach, the traditional GPS limitations in indoor settings are overcome, opening up possibilities for navigation, for example, through multi-level shopping malls, parking lots, busy airports, complex subway stations, and dynamic fairs. The implications extend to enhancing the user experience by facilitating efficient and accurate movement and aiding in locating specific points of interest, such as booths at multi-floor conferences or trade fair venues. Moreover, the application of pressure sensors in fitness tracking adds a new dimension to activity monitoring. By measuring the number of floors climbed, users can gain valuable insights into the intensity and elevation of their physical activity. The work presented in [
14] offers more insights on the topic of indoor positioning.
3. Calibration of Pressure Sensors
Many ML and DL approaches have been proposed in the literature for the calibration of pressure sensors affected by aging, environmental variations, and thermal drift. Most of the related works, however, consider only static calibration; therefore, they do not take into account the temporal duration of the un-calibration caused by the sensor’s exposure to high temperatures, even if for a limited amount of time. Such exposure could generate effects that last for several days, as observed in the post-soldering use case.
3.1. Static Calibration
The compensation of thermal drift in a silicon piezoresistive pressure sensor was proposed in [
4] by transferring an Extreme Learning Machine (ELM) trained on a personal computer (PC) to an external MCU. The ELM improved the accuracy temperature coefficient in the nominal −40–85 °C range from 2.57% FS to 0.13% FS and, due to its shorter training time, was suitable for batch compensation.
A similar approach was embraced by [
19], using an ELM that had as inputs the output of the sensor and the non-target parameters, i.e., temperature and voltage fluctuations. It mapped them to the true pressure value. In the experiments, the model achieved a mean squared error (MSE) of 0.338 with a training duration of 1.35 s. Additionally, the proposed method was compared with the backpropagated neural network (NN) and a support vector machine (SVM). The proposed ELM achieved better accuracy and stability and had a shorter training time and lower application costs. The ELM was deployed on a commodity PC, which was costly compared to the low-memory budget requirements set by this work.
A new method for the calibration of micro-mechanical capacitive pressure sensors (CPS) using an electrical-only and machine learning approach was detailed in [
20]. The proposed approach relied on a two-stage algorithm. The training stage established correlation curves and coefficients between electrical and physical data for a limited set of devices. In the testing stage, these correlations were used to reconstruct physical points for the calibration of new devices. It achieved average absolute accuracy of 1.74 hPa within the 600–1100 hPa pressure range. The electrical-only calibration method reduced the test time by more than 85% against traditional methods, offering a rapid and cost-effective solution for pressure sensor calibration. The focus on capacitive MEMS pressure sensors differs from the piezoresistive sensor considered in this study.
An ANN-based scheme for the calibration of CPS sensors in harsh environments (extreme ambient temperature, pressure, humidity, etc.) was proposed in [
21]. By employing a backpropagation ML algorithm with a variable learning rate and incorporating random samples in the training process, a CPS calibration model was developed. Both linear and three types of nonlinear influences of temperature on the sensor characteristics across a temperature range from −50 to 200 °C were evaluated through computer-simulated experiments. The NN model’s maximum full-scale error in pressure estimation fell within ±1.0% for the linear form and within ±1.5% for the three nonlinear influences.
An alternative approach involving the usage of a wavelet neural network (WNN) was adopted in [
22] for temperature compensation in silicon piezoresistive pressure sensors. The model took as input temperature and pressure readings from the sensor and produced as output the true pressure value. Furthermore, the solution was compared with standard BP neural networks. The results revealed that the WNN achieved a
3.83×10−33.83×10−3 RMSE, while the latter had a
9.54×10−39.54×10−3 RMSE. Ref. [
23] proposed a polynomial-based adaptive digital temperature compensation method for automotive piezoresistive pressure sensors. The compensation technique effectively addressed the nonlinear temperature dependency of the pressure sensor by leveraging opposite characteristics as a function of temperature. Implementing the compensation polynomial in a digital system, the approach also incorporated a scaling technique to enhance the accuracy while adopting a resource-sharing technique to minimize the controller area and power consumption. Additionally, the shared structure approach integrated a high-resolution sigma-delta analog-to-digital converter (ADC) for improved accuracy across a wide temperature range (−40 °C to 150 °C). The measured temperature compensation accuracy was reported to be within ±0.068% with a full scale, and the entire technique was integrated into an automotive pressure sensor signal conditioning chip using a 180 nm complementary metal–oxide–semiconductor (CMOS) process.
A CMOS analog ASIC of a feedforward NN (FFNN), based on both a conventional neuron model and an inverse delayed function model of the neuron, was designed in [
24] for the temperature drift compensation of high-resolution piezoresistive MEMS pressure sensors. The inverse delayed function model yielded a mean square error in the order of
10−710−7 for the neural network, significantly outperforming the conventional neuron model, with a mean square error in the order of
10−310−3 for the same ANN architecture. This resulted in a remarkable reduction in error, from 9% for an uncompensated sensor to only 0.1% for a compensated sensor, within the temperature range of 0–70 °C, using the delayed model of the neuron. In contrast, compensation with a conventional neuron-based ANN reduced the error to 1%.
The escalating legal pressures from regulatory authorities have resulted in heightened demands for resilient pressure sensors in vehicles. Consequently, ref. [
25] proposed a cost-effective smart piezoresistive pressure sensor that integrated signal conditioning, analog/digital signal processing, and communication circuitry directly into the sensor element within a single compact housing system. The smart pressure sensor offered enhanced reliability and accuracy through built-in features such as temperature compensation, filtering, and self-calibration. The latter was obtained through a two-layer feedforward ANN architecture trained with Levenberg–Marquardt backpropagation and deployed on an external MCU. The ANN received as input the output pressure indicated by the signal conditioner and it output the true pressure value. After testing the sensor calibration system, the accuracy achieved was
±0.25%±0.25% FS, as opposed to
±0.4%±0.4% FS indicated in the datasheet of the bare sensor.
3.2. Dealing with Small Datasets
One of the main issues to tackle when developing an NN model for sensor compensation is the small size of the calibrated data. To address this issue, ref. [
26] leveraged data augmentation by learning the calibration process of pressure sensors through the proposed Aquila optimized mixed polynomial kernel ELM (AO-MPKELM) algorithm. Results showed strong consistency between real and generated data, with a maximum voltage deviation of 0.71 mV. Compensating through bilinear interpolation, measurement errors were reduced by 78.95% with full-scale accuracy of 0.03%.
Standard procedures for pressure sensor calibration consist of subjecting the recently manufactured sensors to several controlled temperature and pressure set points to fit a polynomial mapping between the sensor’s predicted value and true pressure. The large number of pressure and temperature set points required by this approach makes it costly, time-consuming, and impractical for industrial deployment. An alternative solution is adopting an ML model to predict the calibration polynomial’s parameter using fewer calibration data, learning from past calibration sessions [
27]. The proposed solution considers a novel polynomial hyper-network coupled with Fourier features and a weighted loss. Extensive evaluations show that such an approach saves two thirds of the calibration time and cost.
As the use of ANNs for calibration processes has been limited due to issues like lower training speeds, local minima, and overfitting due to few data available, an SVR model was adopted in [
28] to compensate for the pressure sensor’s nonlinearity influenced by temperature and voltage fluctuations. The proposed model established a mapping relationship between the actual voltage output characteristics and pressure sensor nonlinearity, reducing the error from 22.2% to 0.64% in the proposed experiments. The SVM’s calibration model, applied to the CYJ-101 Pressure Sensor, demonstrated improved accuracy and stability, offering a viable solution for sensors affected by temperature and voltage fluctuations. The self-adaptive adjustment of parameters further enhanced the model’s effectiveness.
A similar approach was adopted by [
29], which modeled the complex hysteresis of a diffused silicon pressure sensor through a Preisach model obtained by regression analysis from experimental data. Considering the limited amount of samples, the SVR approach led to better results with respect to BP neural networks, as the latter overfitted. This corroborated the superiority in terms of accuracy of SVM, in comparison with NNs, when operating in a few-samples regime.
3.3. Evolutionary Algorithm Approaches
An alternative approach to avoid overfitting and local optima due to the small amount of available calibrated data consists of the use of evolutionary algorithms. Ref. [
30] adopted three different types of swarm optimization algorithms in combination with ML models for the temperature compensation of three different ranges of sensors. It achieved a zero-drift coefficient of
2.88×10−72.88×10−7/°C and a sensitivity temperature coefficient of
4.52×10−64.52×10−6/°C. In another study, ref. [
31] presented adaptive mutation particle swarm optimization optimized support vector regression (AMPSO-SVR) integrated with an improved version of AdaBoost. The RT algorithm was used to calibrate the ambient temperature nonlinearity in a silicon piezoresistive pressure sensor. Results were superior compared to other methods and the AMPSO algorithm successfully avoided local optima in the model parameters.
3.4. Temporal Dependence of Sensor Drift
The aforementioned methods do not address the temporal-dependent aspect of the sensor drift. A candidate solution is to use sequential DL models such as a gated recurrent unit (GRU) and long short-term memory (LSTM). In such a context, ref. [
32] proposed a multi-class classifier model based on the combination of an improved LSTM and SVM for drift compensation in gas sensors. The higher classification accuracy, however, was achieved at the price of high model complexity. Similarly, ref. [
33] adopted an LSTM for the calibration of air pressure sensors in order to account for the temporal characteristics of the measurement data. The test outcomes on the pressure sensor dataset within the range of [0 kPa, 1100 kPa] and [−30 °C, 30 °C] indicated that, in comparison to other sensor calibration methods, such as BP and radial basis function (RBF) networks, the pressure sensor error was decreased from 1.4 kPa to approximately 0.55 kPa, while the overall calibration speed was not improved. On the other hand, ref. [
34] adopted a deep sequential model named Concatenated GRU and Dense Layer with Attention (CGDA) for environmental and time drift compensation in economic gas sensors. The hourly drift sequence was predicted with mean accuracy of over 93% by the model for an entire day.
As an alternative to sequential models, the time dimension as an input to the model has been considered. Ref. [
35] proposed a real-time self-calibration process based on the Levenberg–Marquardt backpropagation ANN model for pressure estimation in a grasped object using a wearable robotic hand glove. In the experimental setup, a load cell force sensor was used as a reference for the calibrated data obtained during 20 min dynamical loading with 28 repetition cycles. To capture the time dependence of the calibration error, the inputs to the model were the registered voltage and the number of pulses. The method achieved a maximum mean square error of 0.17325 and an R-value over 0.99 for the total response of training, testing, and validation. Unfortunately, the use of a load cell force sensor is not within the scope of this work.
This entry is adapted from the peer-reviewed paper 10.3390/electronics12234819