The growing importance of deformable object manipulation (DOM) in caregiving settings can be attributed to various factors. One significant driving force is the aging population, which has led to increasing demand for caregiving services. In addition to supporting the elderly, deformable object manipulation technologies can assist individuals with disabilities and special needs, improving their quality of life and promoting independence. Another essential aspect of deformable object manipulation in caregiving scenarios is the potential to enhance precision and safety in medical procedures. These technologies can reduce the physical strain experienced by human caregivers, preventing injuries and enabling them to provide better patient care.
- deformable object manipulation
- robotic caregiving
- assistive robots
- machine learning
- simulation environments
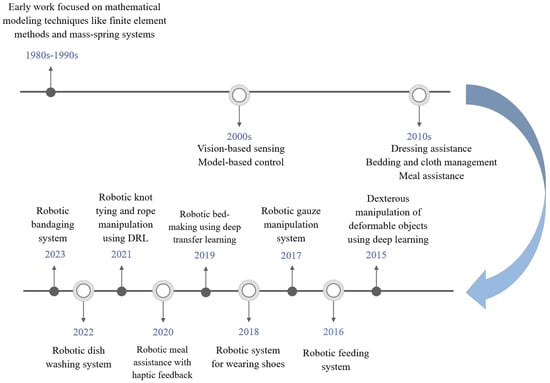
1. An Outlook by Timeline
2. Classification of Applications
-
Dressing assistance is an essential application of DOM in caregiving scenarios, particularly for users with limited mobility or dexterity. Researchers have developed robots capable of assisting users in putting on various clothing items, including T-shirts [19], pants [37], and footwear [38]. These studies have demonstrated the potential of DOM in addressing the challenges faced by individuals with disabilities and the elderly in performing daily dressing tasks.
-
Bedding and Cloth Management is another crucial application of DOM in caregiving scenarios, as it involves handling large, deformable objects and ensuring user comfort and hygiene. Researchers have developed robotic bed-making systems to grasp tension and smooth fitted sheets [20]. Robots capable of managing blankets [21] and pillows [22] have also been developed. The success of these works highlights the potential of DOM in addressing the challenges associated with bedsheet management and the need for continued research and development in this area. Cloth folding is also essential in caregiving settings, particularly for maintaining order and cleanliness. Researchers have developed robots capable of folding clothes, such as towels, shirts, and ropes [19,34,39,40,41,42,43].
-
Personal Hygiene Support is another critical application of DOM in caregiving scenarios. Researchers have developed robots that handle soft materials such as gauze [27] and diapers [44]. These studies have highlighted the importance of integrating various sensory modalities and control techniques for effective soft material handling in caregiving scenarios.
-
Meal Assistance is another important application of DOM in caregiving scenarios, particularly for users with limited mobility or dexterity. Researchers have developed robots capable of manipulating deformable objects such as food items and utensils [23,24,25,26]. These studies have demonstrated the potential of DOM in addressing the challenges faced by individuals with disabilities and the elderly in performing daily meal assistance tasks.
-
Daily Medical Care. In the context of bandaging, deformable object manipulation systems offer improved precision and control, enabling more effective and efficient wound-dressing procedures. These systems can adapt to the varying shapes and contours of the human body, as well as the patient’s involuntary swaying, ensuring proper bandage placement and tension for optimal healing [28]. Deformable object manipulation technologies assist patients during therapeutic exercises and activities in rehabilitation. They provide real-time feedback, support, and guidance, enhancing repair and promoting faster recovery [45,46,47].
3. A New Method to Classify and Analyse
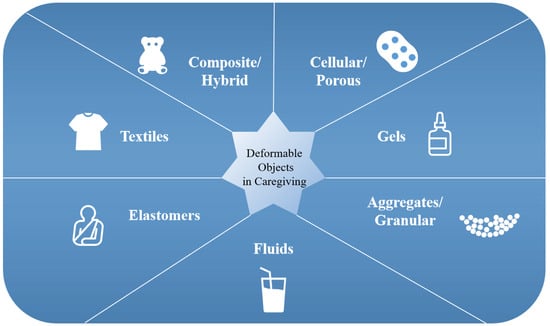
3.1. Common Types of Deformable Objects in Caregiving Scenarios
-
Textiles: This category would cover all cloth and fabric objects like clothing, sheets, towels, etc. Key properties are flexibility, drape, and shear.
-
Elastomers: Includes stretchable/elastic materials like bandages, tubing, and exercise bands. Key properties are elongation and elasticity.
-
Fluids: Encompasses materials like water, shampoo, and creams that flow and conform to containers. Key behaviors are pourability and viscosity.
-
Aggregates/Granular: Covers aggregated materials like rice, beans, and tablets. Flows but maintains loose particulate structure.
-
Gels: Highly viscous/elastic fluids like food gels, slime, and putty. Resist flow due to cross-linked molecular structure.
-
Cellular/Porous: Materials with internal voids like sponges and soft foams. Compressible and exhibit springback.
-
Composite/Hybrid: Combinations of the above categories, like stuffed animals and packaged goods. Display complex interactions of properties.
3.2. A Multi-Factor Analysis Method
-
Application Utility (U)—Potential to reduce caregiver burden by automating tasks
-
Object Frequency (F)—How often the object occurs in caregiving activities
-
Task Complexity (C)—Technical challenges posed by physical properties and handling difficulties
-
Safety Criticality (S)—Risks of injury or harm during object manipulation
-
Research Maturity (M)—Existing state of manipulation methods for the object
-
Surveys, interviews, and activity logging (for Application Utility)
-
Workflow observations and activity logging (for Object Frequency)
-
Material testing, caregiver surveys, and interviews (for Task Complexity)
-
Incident data and healthcare professional feedback (for Safety Criticality)
-
Literature review (for Research Maturity)
-
Each metric is normalised on a 0–1 scale based on the maximum value observed. This transforms metrics to a common scale.
-
Criteria weights are assigned to each factor based on the caregiving context. For example, Safety Criticality may be weighted higher for hospital settings compared to home care.
-
Weighted sums are calculated by multiplying each normalised metric by the criteria weight.
-
The weighted sums are aggregated to derive an overall priority score P for each deformable object, where U, F, C, S, and M are the normalised metrics and w1 to w5 are the criteria weights.:

-
Objects are ranked by priority score P, identifying high-impact areas needing research innovations.
4. Challenges of DOM in Caregiving
This entry is adapted from the peer-reviewed paper 10.3390/machines11111013