Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Jessie Wu and Version 3 by Jessie Wu.
As the scale of electric vehicles continues to expand, the charging load of electric vehicles into the network has become an issue that cannot be ignored. The application architecture of ordered charging is summarized.
- orderly charging
- V2G
- optimization algorithm
- virtual power plant
- data security
1. The Concept of Orderly Charging
Due to the increasing scale of electric vehicles, the impact of charging load on the grid must be addressed when a large number of electric vehicles are connected to the grid for charging. It can lead to grid overload, increase the difficulty of grid dispatch, reduce power quality, and affect electrical equipment [1]. The quantitative assessment of the impact of large-scale electric vehicles on the grid and the study of charging control strategies aimed at reducing the negative impact have become increasingly popular issues, and [2][3] have proposed charging interaction strategies between the grid and electric vehicles, while the concept of orderly charging has emerged. The authors in [4] propose a real-time power balancing strategy for electric vehicle charging loads. The authors in [5] propose that the orderly charging strategy uses practical and effective economic or technical measures to guide and control electric vehicle charging to meet the charging demand for electric vehicles; to reduce the variance of the load curve by “peak shaving and valley filling”; and to reduce the construction of installed power generation capacity to ensure the coordinated and interactive development of electric vehicles and the power grid. The authors in [6] propose that electric vehicles be considered as a new controllable load that participates in regulating grid operation for charging optimization. The authors in [7] developed a charging scheduling strategy for electric vehicles considering traffic information and grid operation.
The OCPP protocol was developed by the OCA (Open Charge Alliance) in 2009, marking the establishment of the communication specification for V2G technology. With the update and application of V2G technology, the OCPP protocol has now been updated to version V2.0.1, which has a more standardized standard in terms of extended security and intelligent charging. With V2G technology, the unilateral consumption of electricity by electric vehicles is changed, and the two-way transmission of electricity between electric vehicles and the grid is achieved [8]. Smart V2G technology can benefit users while reducing battery losses [9]. The development of the ISO15118 protocol further ensures charging data security, realizes plug-and-charge and other functions, and provides convenience for the application of V2G technology. The authors in [10] pointed out the development potential of V2G technology. As long as users’ “mileage anxiety” and “minimum mileage” are addressed, orderly charging can achieve high V2G participation. The authors in [11] proposed that through V2G technology, electric vehicles can be considered adjustable loads when charging. Peak load shifting is achieved through orderly charging management. Electric vehicle batteries can also be used as energy storage devices as the backup capacity for the distribution grid to optimize grid operation.
The development of today’s orderly charging technology has become increasingly mature. By collecting the region’s load data and analyzing the grid operation, the base load model of the grid is constructed. Then, based on the charging data of charging piles, the charging load model of electric vehicles is built. The two load models are used for day-ahead scheduling or real-time scheduling of power operations to prevent grid overload. In addition, the charging load of electric vehicles is involved in grid regulation through V2G technology by making appropriate task arrangements for charging orders from users at the control center level of charging piles or by guiding users at the level of distributed charging piles. Based on not causing grid overload, it controls the charging and discharging of electric vehicles to the “peak-shaving and valley-filling” of the grid, reduces network losses, and consumes new energy to benefit the grid. It enables users who choose not to accept the charging arrangement to complete charging at the fastest possible speed, depending on the needs of the different users. It also allows users who accept charging arrangements to complete charging at the lowest cost and at the right time, benefiting the user side. Appropriate charging deployment is made according to the profit demand and operation cost of charging stations so that the power station side can obtain enough profit to benefit the power station side. The optimization goal of an orderly charging strategy is the most suitable arrangement of a charging plan in the face of different actual situations and specific requirements. The sequential charging optimization is shown in Figure 1 below.
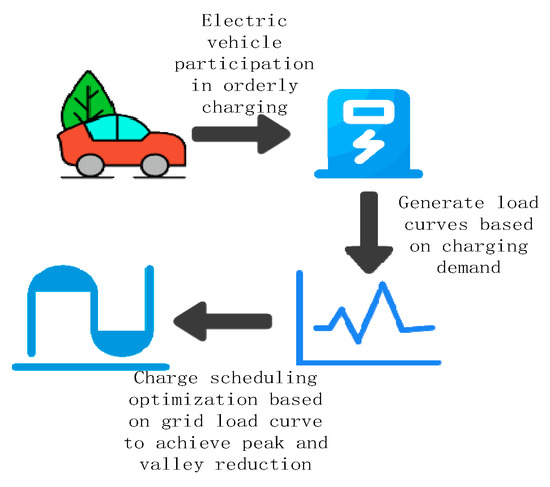
Figure 1. Sequential charging optimization concept.
2. Control Architecture for Orderly Charging
To better derive optimization solutions for different requirements, the researchers designed three control architectures for the control level of the charging pile, the user side of the pile, and the coordinated optimization of both aspects. They correspond to centralized optimization, distributed optimization, and hierarchical optimization, respectively. The three architectures have different characteristics, which will be introduced and compared from different perspectives.
2.1. Centralized Control Structure
The centralized control structure is a control center that directly controls the charging and discharging behavior of the charging piles. The control center collects the load data of the area and builds a load model. Charging orders from users are processed centrally, and charging tasks are scheduled according to different optimization objectives based on the base load model. The authors in [12] proposed an orderly charging scheduling strategy with centralized control to optimize the charging and discharging of electric vehicles by a local search and particle swarm algorithm, which realizes the “peak shaving and valley filling” of the grid and reduces the charging cost of users. The authors in [13] proposed an orderly charging optimization method based on the fuzzy heuristic algorithm and designed a public transportation operation system for centralized control of EV charging orders in public parking lots. The method optimizes the resource deployment of the grid and reduces the operating cost of charging piles. As seen from the above-referenced papers, the centralized optimization approach can leverage the control center’s ability to integrate data and centralize computational scheduling under different optimization objectives to derive a scheduling strategy with global optimization benefits. It can achieve the optimal solution for multiple objectives. However, the disadvantages are also apparent. On the one hand, there is the problem of computational difficulty. As the scale of electric vehicle charging increases, the difficulty and time for the control center to calculate the multi-objective optimal solution increase exponentially. This is different from the requirements for fast and convenient charging on the user side and has significant limitations for the optimization strategy of real-time scheduling. On the other hand, the user needs to send the charging request to the control center through the charging post or mobile app. Then, the control center sends the charging task to the charging port. This process requires high communication capability of the control system and can be slightly hindering to use in places where the signal is unstable. As shown in Figure 2.
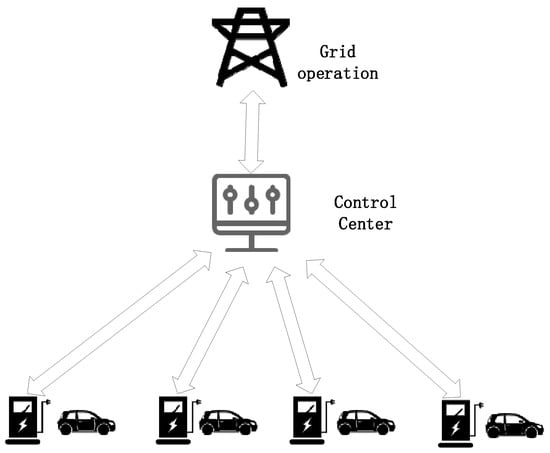
Figure 2. Centralized control architecture.
2.2. Distributed Control Structure
The core of the distributed control structure is to guide customers to orderly charging through time-of-use tariffs, allowing them to save on charging costs while relieving the operational pressure on the grid. The operation information of charging stations and charging tariff data are displayed to users, who make charging decisions based on their needs and the above information and send charging requests to charging stations, which arrange to charge after verifying charging orders. There are two time-sharing tariff approaches: day-ahead dispatch tariff guidance and real-time dynamic tariff guidance. The authors in [14] proposed a distributed control strategy based on the day-ahead tariff model. The day-ahead load curve and load forecasting model derives a time-of-day tariff model from guiding customers. It improves the operator’s profit and reduces the users’ charging costs. The authors in [15] proposed an orderly charging strategy based on deep learning and real-time tariff guidance. The scheduling structure is constructed using real-time electricity prices, and electric vehicle charging and discharging behaviors are optimized by deep learning to create a win‒win situation for the grid and electric vehicle users. As seen from the above references, the distributed control structure uses the time-of-use tariff to guide and optimize the charging periods of the users. The advantages are (1) greater charging selectivity for users; (2) less computational difficulty for the control center, which can process users’ subscriptions faster; and (3) less communication pressure on the system. The disadvantage is that it depends more on the user’s responsiveness to the time-of-use tariff. If the user’s response is low, the goal of orderly charging cannot be achieved. In addition, the regulating role of distributed optimization is relatively singular and cannot achieve the purpose of multi-objective optimization through the guidance of a time-sharing tariff. It cannot achieve the same effect as centralized optimization regarding new energy consumption and network loss reduction. As shown in Figure 3.
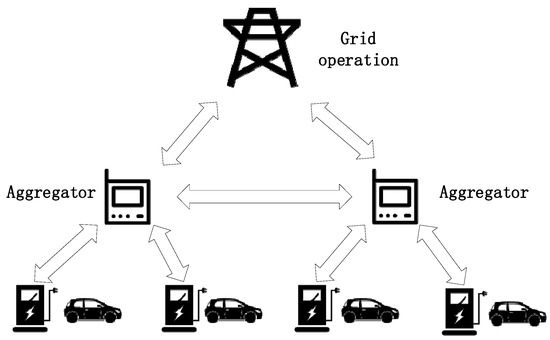
Figure 3. Distributed control architecture.
2.3. Hierarchical Control Structure
The hierarchical control structure combines the features of centralized and distributed control. The time-of-use tariff of distributed control guides users’ charging choices and combines users’ charging requests and optimization goals at the control center. The most suitable EV charging order arrangement is derived from reaching the optimization goal and benefiting multiple parties. The authors in [16] proposed a two-tier optimization model based on the real-time load of the grid. The real-time electricity price model is constructed based on the regional load. The lower layer model is aimed at optimizing the EV charging load, and the upper layer is aimed at optimizing the charging price in real time. The results of the two-tier optimization are combined to optimize the multi-objective ordered charging strategy. The objective of “peak shaving and valley filling”, reducing user charging costs and promoting new energy consumption, is achieved. The authors in [17] proposed an overall architecture of the master station and energy controller in hierarchical cooperative control. The first level of optimization is to control the charging cost of users, and the second level is to reduce the fluctuation of the grid load. The charging cost of users is reduced, and the operation of the grid is optimized. As seen from the above references, the hierarchical control structure combines the user-side guidance of distributed control with the control center optimization of centralized control. It reduces the computational pressure on the control center and the transmission pressure on the communication lines while achieving global multi-objective optimization and avoiding the extreme case of low user responsiveness. It combines the advantages of both control structures and compensates for the disadvantages of each. As shown in Figure 4.
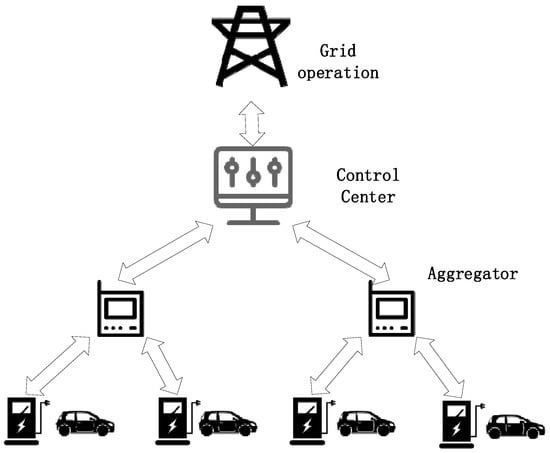
Figure 4. Hierarchical control architecture.
2.4. Application Analysis
The characteristics of the three orderly charging control structures are suitable for application environments in different scenarios. The centralized control structure requires the majority of users to respond to orderly charging and sufficient scheduling time, but it achieves better optimization results with a relatively small investment. This approach is more suitable for small-scale charging stations, such as a collection of charging posts in residential communities, and can make full use of users’ parking time at night for orderly charging scheduling. The distributed control structure relies on the responsiveness of users and can provide them with freer charging options. This model is more suitable for small and medium-sized commercial charging stations, such as those in office buildings, and can guide users to participate in orderly charging through the economic benefits of time-of-use tariffs, which take advantage of users’ working hours for optimal scheduling of orderly charging. The hierarchical control structure is the most optimized of the three approaches, but it is also the most expensive. This approach is more suitable for charging stations in large-scale and high-traffic areas, such as optical storage charging stations in commercial centers. Through the optimal scheduling of orderly charging, we can strive for economic benefits for users during their parking hours, and we can fully consume PV power and make full use of energy storage equipment to assist in peak shaving and valley filling. The analysis of the three structures is shown in Table 1.
Table 1. Comparison of three control structures.
| Control Structure | Advantages | Disadvantages | Applicable Scenarios |
|---|---|---|---|
| Centralized control structure [12][13] | Can find the global optimal solution, good optimization effect, small investment | Need for adequate scheduling frequency and user responsiveness | Small-scale charging stations or a collection of charging stations in residential areas |
| Distributed control structure [14][15] | Provide users with more free charging options for a wider range of scenarios | Poor optimization when customer responsiveness is low, more dependent on time-of-use tariff strategy | Small and medium-sized charging stations, such as commercial charging stations in office buildings |
| Hierarchical control structure [16][17] | The best optimization effect can achieve multi-objective optimization, to achieve the goal of multi-benefit | Large investment, difficult operation, and higher requirements for optimization strategies | Large-scale charging stations, such as optical storage charging stations in commercial centers |
| Control Structure | Advantages | Disadvantages | Applicable Scenarios |
|---|---|---|---|
| Centralized control structure [12][13] | Can find the global optimal solution, good optimization effect, small investment | Need for adequate scheduling frequency and user responsiveness | Small-scale charging stations or a collection of charging stations in residential areas |
| Distributed control structure [14][15] | Provide users with more free charging options for a wider range of scenarios | Poor optimization when customer responsiveness is low, more dependent on time-of-use tariff strategy | Small and medium-sized charging stations, such as commercial charging stations in office buildings |
| Hierarchical control structure [16][17] | The best optimization effect can achieve multi-objective optimization, to achieve the goal of multi-benefit | Large investment, difficult operation, and higher requirements for optimization strategies | Large-scale charging stations, such as optical storage charging stations in commercial centers |
References
- Xiao, H.; Huimei, Y.; Chen, W.; Hongjun, L. A survey of influence of electrics vehicle charging on power grid. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 121–126.
- Han, H.; Xu, H.; Yuan, Z. Research of interactive charging strategy for electrical vehicles in smart grids. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6.
- Wu, C.; Mohsenian-Rad, H.; Huang, J. Vehicle-to-aggregator interaction game. IEEE Trans. Smart Grid 2011, 3, 434–442.
- Adhikari, S.; Halgamuge, S.K.; Watson, H.C. An online power-balancing strategy for a parallel hybrid electric vehicle assisted by an integrated starter generator. IEEE Trans. Veh. Technol. 2010, 59, 2689–2699.
- Xu, Z.; Hu, Z.; Song, Y.; Luo, Z.; Zhan, K.; Shi, H. Coordinated charging of plug-in electric vehicles in charging stations. Autom. Electr. Power Syst. 2012, 36, 38–43.
- Zhang, L.; Zhang, M.; Lin, W. Design and discussion of a unified EV-grid integration structure. Mod. Electr. Power 2014, 31, 34–39.
- Luo, Y.; Zhu, T.; Wan, S.; Zhang, S.; Li, K. Optimal charging scheduling for large-scale EV (electric vehicle) deployment based on the interaction of the smart-grid and intelligent-transport systems. Energy 2016, 97, 359–368.
- Yuhuan, H.E.; Xiuyuan, Y.; Qiyu, C.; Siqi, B.; Zhiqiang, X.; Tianying, X. Review of Intelligent Charging and Discharging Control and Application of Electric Vehicles. Power Gener. Technol. 2021, 1, 180–192.
- Qiyu, C. Research on Implementation Strategy of Ubiquitous Power Internet of Things. Power Gener. Technol. 2019, 40, 99–106.
- Geske, J.; Schumann, D. Willing to participate in vehicle-to-grid (V2G)? Why not! Energy Policy 2018, 120, 392–401.
- He, Y.; Chen, Y.; Yang, Z.; He, H.; Liu, L. A review on the influence of intelligent power consumption technologies on the utilization rate of distribution network equipment. Prot. Control Mod. Power Syst. 2018, 3, 18.
- Yin, W.J.; Ming, Z.F. Electric vehicle charging and discharging scheduling strategy based on local search and competitive learning particle swarm optimization algorithm. J. Energy Storage 2021, 42, 102966.
- Wu, H.; Pang GK, H.; Choy, K.L.; Lam, H.Y. Dynamic resource allocation for parking lot electric vehicle recharging using heuristic fuzzy particle swarm optimization algorithm. Appl. Soft Comput. 2018, 71, 538–552.
- Rui, T.; Hu, C.; Li, G.; Tao, J.; Shen, W. A distributed charging strategy based on day ahead price model for PV-powered electric vehicle charging station. Appl. Soft Comput. 2019, 76, 638–648.
- Wang, K.; Wang, H.; Yang, J.; Feng, J.; Li, Y.; Zhang, S.; Onyeka, O.M. Electric vehicle clusters scheduling strategy considering real-time electricity prices based on deep reinforcement learning. Energy Rep. 2022, 8, 695–703.
- Yang, X.; Niu, D.; Sun, L.; Ji, Z.; Zhou, J.; Wang, K.; Siqin, Z. A bi-level optimization model for electric vehicle charging strategy based on regional grid load following. J. Clean. Prod. 2021, 325, 129313.
- Shen, G.; Chen, G.; Zhao, Y.; Li, X.; Geng, A.; Yuan, H.; Liu, F. Orderly charging optimization strategy of an electric vehicle based on double objective hierarchical optimization and TOPSIS ranking. Power Syst. Prot. Control 2021, 49, 115–123.
More