Environment perception remains one of the key tasks in autonomous driving for which solutions have yet to reach maturity. Multi-modal approaches benefit from the complementary physical properties specific to each sensor technology used, boosting overall performance. The presented 360∘ enhanced perception component is based on low-level fusion between geometry provided by the LiDAR-based 3D point clouds and semantic scene information obtained from multiple RGB cameras, of multiple types. This multi-modal, multi-sensor scheme enables better range coverage, improved detection and classification quality with increased robustness. Semantic, instance and panoptic segmentations of 2D data are computed using efficient deep-learning-based algorithms, while 3D point clouds are segmented using a fast, traditional voxel-based solution.
- autonomous driving
- environment perception
- low-level geometry and semantic fusion
1. Introduction
This perception solution builds upon ourthe previous work focused on generating semantically enhanced point clouds [3] with large improvements to the capacity to extract semantic information from the scene, as well as an optimized implementation for realtime operation on limited hardware resources that handles all associated tasks: data pre-processing (data batch formation along with continuous monitoring of data availability, LiDAR motion correction, image undistortion), semantic information extraction, 3D point cloud segmentation, low-level fusion of 3D-point geometric data with 2D semantic information and, finally, the enhanced perception consisting of 3D object detection refinement and classification. WThe researchers adopt a low-level fusion approach in order to retain a larger number of joint multi-modal features, which are typically lost in higher (e.g., object) level fusion schemes. As we athe researchers aim to fuse raw 3D and 2D measurements as well as semantic information extracted from the camera images, wethe researchers are constrained to performing the low-level fusion later in the processing chain, in order to maintain real-time capabilities on the imposed hardware resources. This allows processing the 3D and 2D modalities in parallel up to the fusion step. While an early-low-level fusion design could enable a more advanced segmentation of the enhanced point cloud, stalling the processing pipeline until the computationally intensive semantic segmentations are generated would dramatically increase the final latency of the results. In order to maintain real-time capabilities on the imposed hardware resources, wethe researchers adopted this parallelized, late-low-level fusion architecture for the enhanced perception solution. The independently obtained 3D and 2D segmentations, together with the semantically enhanced point cloud, can be used in other parallel perception and higher level tasks.
2. Proposed Approach for the Enhanced Perception System
2.1. Test Vehicle Sensory Setup
The demonstrator used in the UP-Drive project is based on a fully electric Volkswagen eGolf outfitted with industrial computers in the trunk space, which can take over all controls of the vehicle. The perception task is carried out on a small form factor PC that features a quad-core processor running at 3.60 GHz and a NVIDIA GTX1080 GPU. Figure 2 shows the sensor payload layout used by the enhanced perception solution: area-view system (also known as surround view, increasingly common on new vehicles) comprising of four cameras, one narrow field-of-view (FoV) camera and five LiDAR scanners. Ego-motion data is also available based on vehicle odometry (without GPS).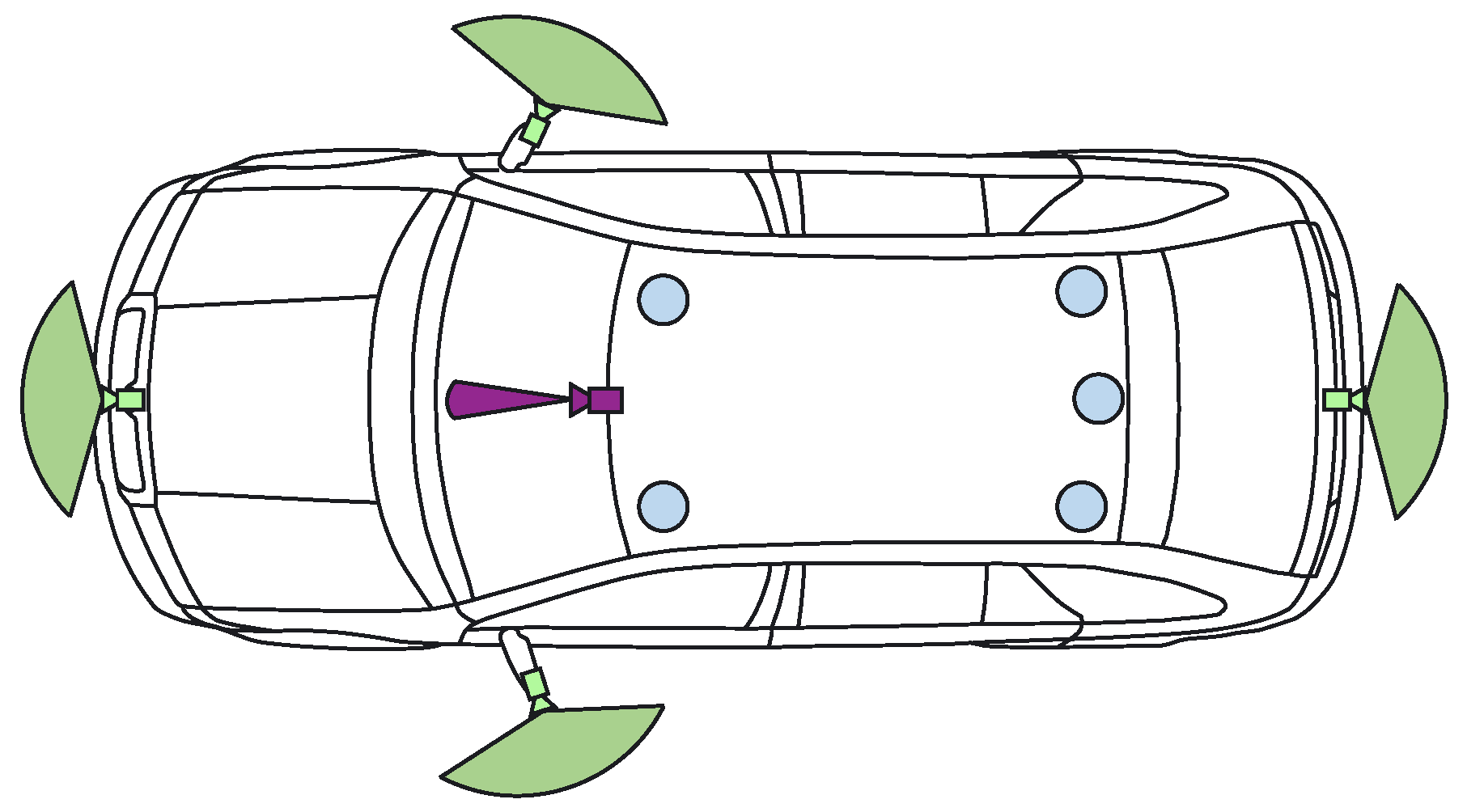
2.2. Perception System Software Architecture
Figure 3 illustrates the enhanced perception system’s architecture, where the necessary operations are subdivided into a series of modular entities, all of which were implemented as plugins in the ADTF Automotive Framework [6] using the C++ programming language. The data inputs are aggregated by the Flow Manager which controls the two processing chains: the operations on the 3D point cloud (light blue) and those on the 2D images (light green).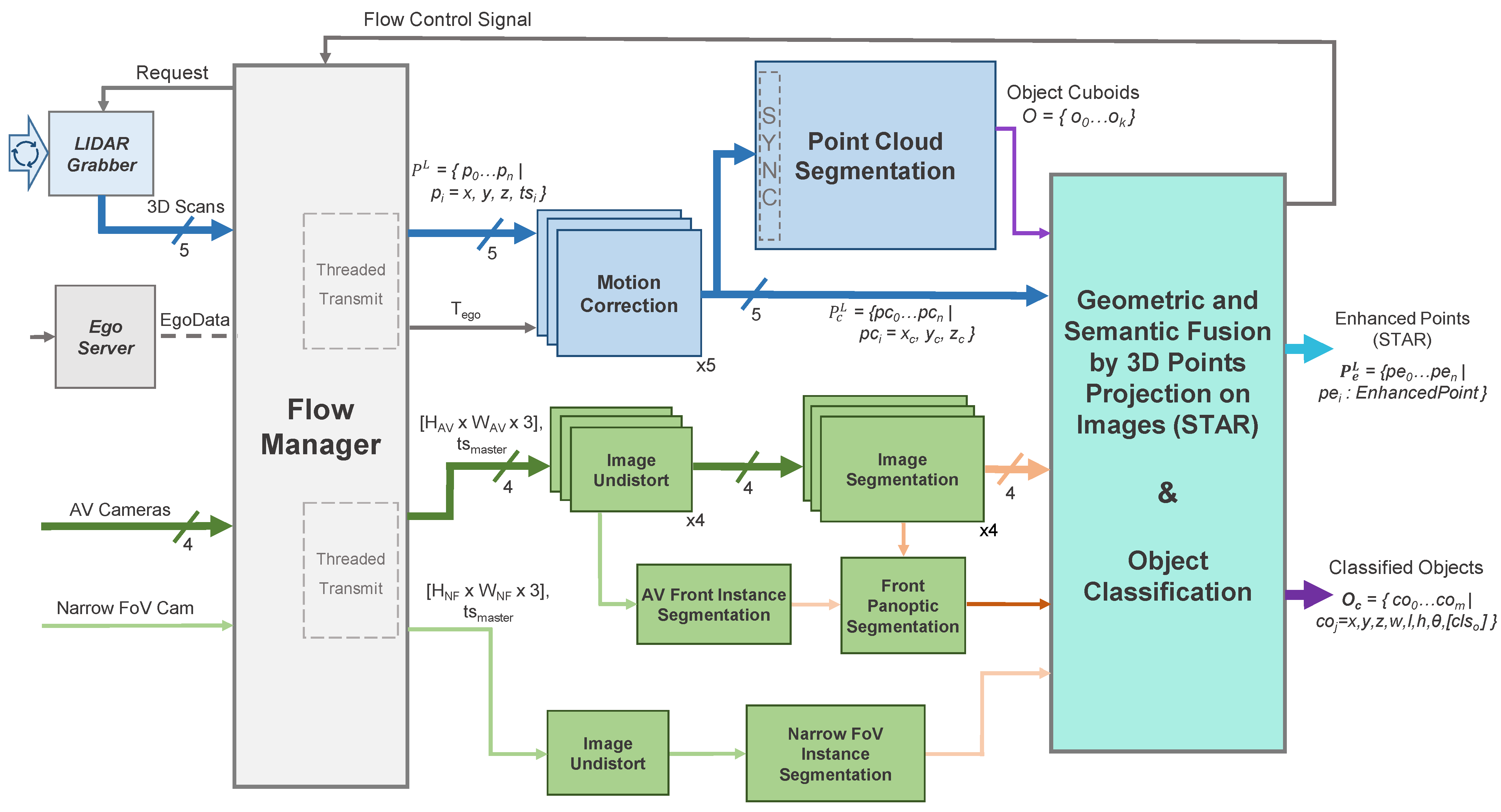
| Algorithm 1: STAR 3D point enhancement representation. |
| struct { float x,y,z; bool isEnhanced; uInt8 r,g,b; uInt16 u,v; \\projection coord. uInt16 instanceID; uInt8 semClass; uInt16 objID; uInt8 objClass; } EnhancedPoint; |
2.3. Pre-Processing Functions
The Flow Manager module performs multiple tasks: data and execution stream synchronization, as well as memory and thread management. Improvements are brought to the system presented in [9] based on continuous monitoring of the system running in real-time onboard the test vehicle. In order to reduce, as much as possible, the latency between the acquisition of raw measurements and the final results being outputted, wthe researchers decided to forgo the use of point cloud buffers for each LiDAR scanner as these introduced additional delays due to the behavior of upstream components. Instead, wethe researchers introduce a data request mechanism to communicate with the raw LiDAR data grabbers. A new data batch is formed by requesting the 360° point clouds from the LiDAR Grabber once processing completes for the current batch (signaled by the Flow Control Signal). The request is based on the batch’s master timestamp, corresponding to the (synchronized) acquisition timestamp of the most recently received set of images, tsmaster. The response to the Flow Manager’s request consists of point clouds from every LiDAR L, where the last scanned point pn in each cloud was measured (roughly) at the master timestamp (consequently, the first scanned point will have been measured approximately 100ms earlier, as the scanners operate at a 10 Hz frequency). Once all the required inputs are gathered, the Flow Manager plugin bundles the calibration parameters and ego motion data and sends them for processing on two independent execution threads, one for each sensor modality. The ego motion is provided as a 4 × 4 matrix Tego, comprised of rotation and translation components that characterize the vehicle’s movement between the moment of image acquisition going back to the earliest scanned 3D point included in any of the five point clouds. The plugin also performs memory management and handles dropouts in sensor data: the system continues to function as long as the cameras and at least one LiDAR are online, while also being able to recover once offline sensors become available. Camera images first undergo an image undistortion pre-processing step that produces undistorted and unwarped images that better represent the scene, based on the camera’s projection model, as detailed in [3]. While wthe researchers have experimented with single- and multi-plane representations of the virtual undistorted imager surface, the best results were obtained when considering a cylindrical representation in which the axis is aligned with the ground surface normal. Using look-up tables, this step is performed in 1 ms for each camera. For 3D data, motion correction is the process of temporally aligning the sequentially-scanned points pi to the master timestamp of the data batch (Equation (1)), thus eliminating the warping induced by ego vehicle movement during the scan (obtaining pci). Besides correcting geometric distortions, this step also enables a pseudo-synchronization between the two sensing modalities, temporally aligning the point clouds to the moment of image acquisition (represented by the master timestamp)—the unknown movements of dynamic objects in the scene limiting the possibility for full synchronization.

2.4. 2D Panoptic Segmentation
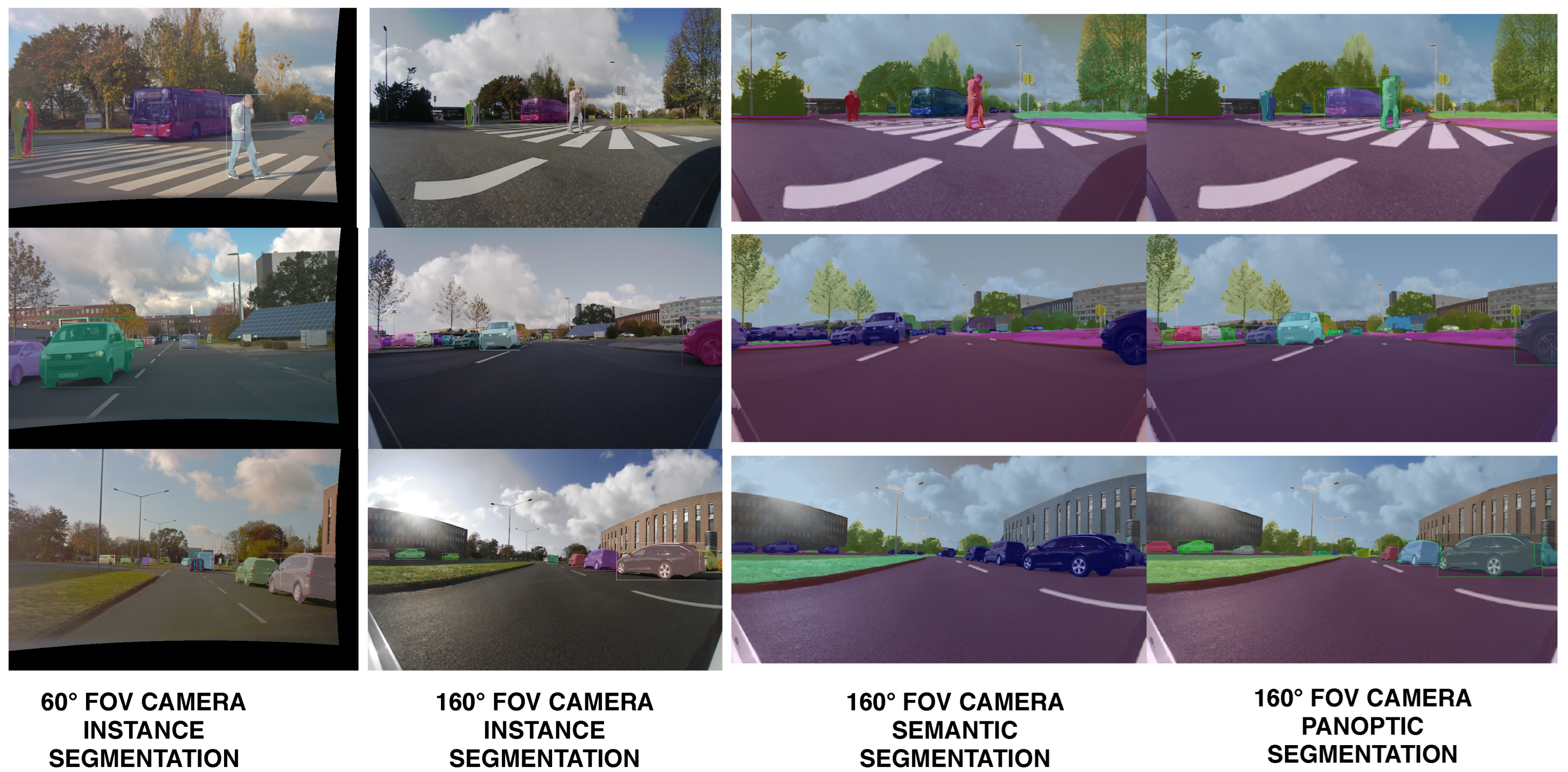
WThe researchers develop a robust, fast and accurate 360∘ deep-learning-based 2D perception solution by processing images from the five cameras mounted on the UP-Drive vehicle. OurThe 2D perception module’s goal is to detect static infrastructure such as road, sidewalk, curbs, lane markings, and buildings, but also to detect traffic participants. This is achieved with image segmentation which extracts semantic and instance information from images. Wethe researchers also solve inconsistencies between semantic and instance segmentation and provide a unified output in the form of the panoptic segmentation image. In the case of wide-angle area-view cameras that provide the 360∘ surround view, a large extent of the scene is captured, but the apparent sizes of objects are smaller compared to narrow FoV cameras. Thus, the detection range of segmentation algorithms of area-view images is limited to the near range around the vehicle. In use cases such as parking or navigation at very low speed, area-view images provide the necessary range. However, detecting distant objects is important when driving at higher speed in urban environment. Therefore, wthe researchers also utilize the narrow 60∘ FoV frontal camera, mounted behind the windshield, in order to extend the detection range. A detailed description of ourthe 2D perception solution is presented in [11]. OurThe hardware resources are limited and ourthe system requirements impose that ourthe 2D perception solution runs in at least 10 FPS. In order to satisfy these constraints, wethe researchers develop semantic image segmentation for the area-view images and instance segmentation only for the front area-view image and the front narrow FoV image. Panoptic image segmentation is implemented for the front area-view image. The instance and panoptic segmentation can be easily extended to other views when using more powerful hardware. For semantic segmentation wthe researchers implement a lightweight fully convolutional neural network (FCN) based on ERFNet [12], which has an encoder–decoder architecture. Results of the semantic segmentation for the four cameras are illustrated in Figure 4. For instance segmentation wthe researchers employ the single-stage RetinaMask [13] network.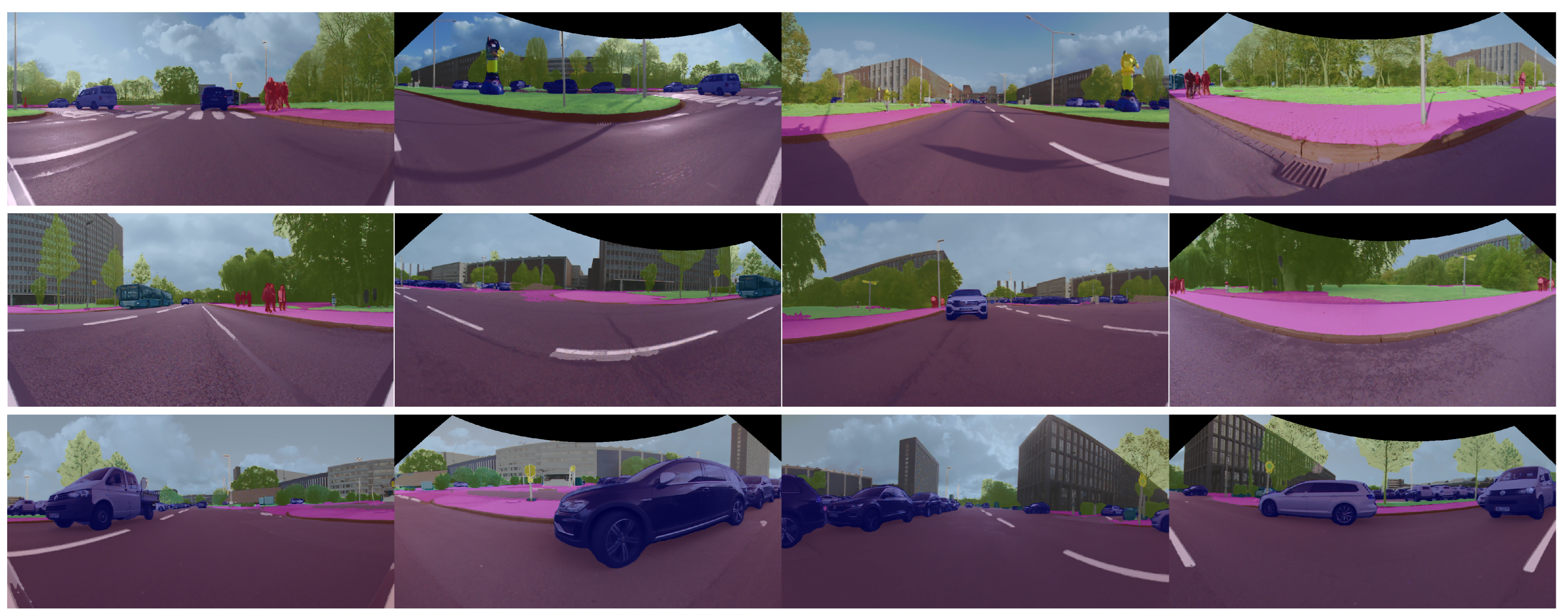
2.5. 3D Point Cloud Segmentation
WThe researchers adopt a two-step strategy for 3D point cloud segmentation: first, the road surface information is extracted from each LiDAR cloud individually, which provides a first separation between LiDAR measurements originating from the road and those from obstacles. This is then followed by a 3D obstacle detection step for which wethe researchers propose a voxel representation that supports fusion across LiDAR sensors. Thus, we the researchers exploit the different viewpoints of each LiDAR scanner in order to obtain a better detection of obstacles in a single pass. Non-road LiDAR points obtained in the first step are fused (and densified) into a single voxel space representation. For each 3D obstacle wee the researchers provide both the traditional cuboidal representation as well as blobs of connected voxels, which can more accurately capture the occupied space of hanging or non-cuboidal obstacles. Figure 6 top, illustrates the initial layer/channel representation of LiDAR data on which the road surface detection is carried out, where 3D measurements are ordered by their layer (vertical) and channel (horizontal) angles. Figure 6 bottom, shows the preliminary road/obstacle classification of the panoramic data which takes into account the local slope information.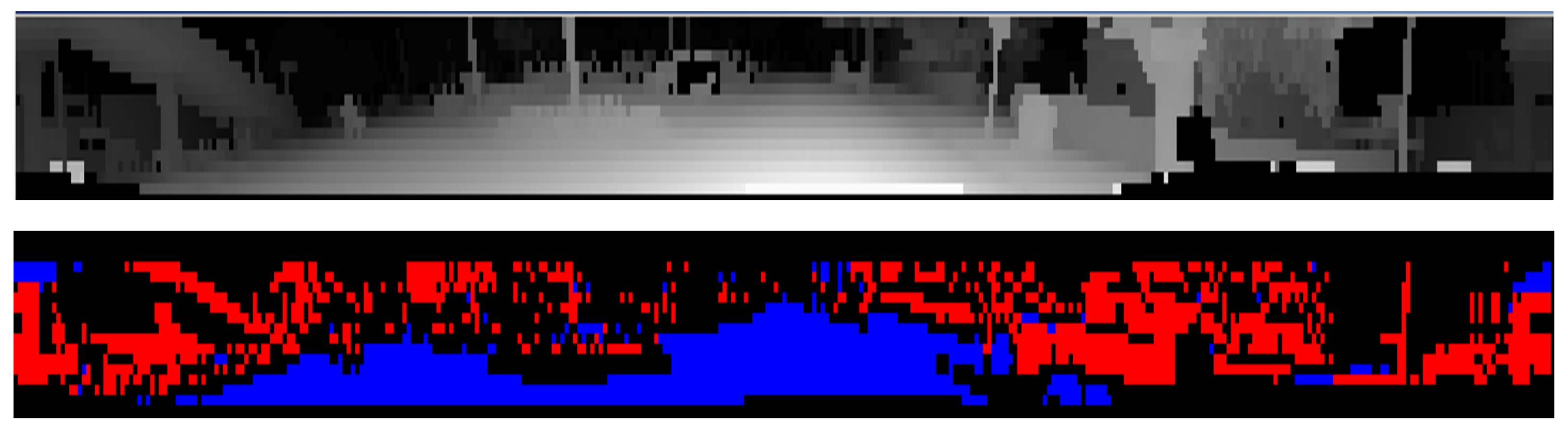
- (a)
-
(vertical) Adjacent layers and the same channel, and the 3D distance between the measurements is below a threshold
- (b)
-
(horizontal) The same layer and adjacent channel values, and the 3D distance between the measurements is below a threshold.
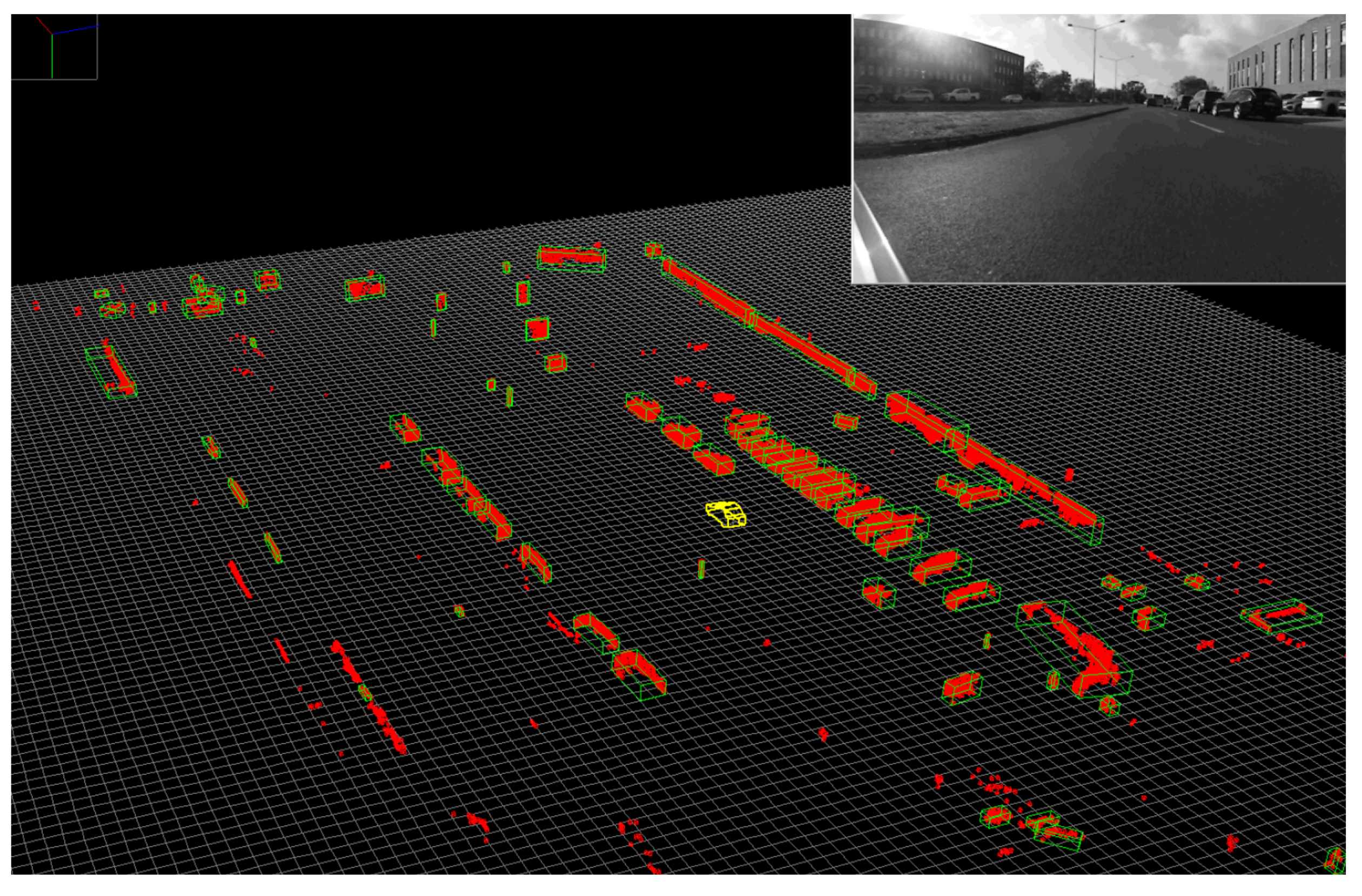 Figure 8.Individual obstacles are detected in the voxel space (red voxels), and valid obstacles are represented as oriented cuboids (green).
Figure 8.Individual obstacles are detected in the voxel space (red voxels), and valid obstacles are represented as oriented cuboids (green).2.6. Low-Level Fusion: Spatio-Temporal and Appearance Based Representation
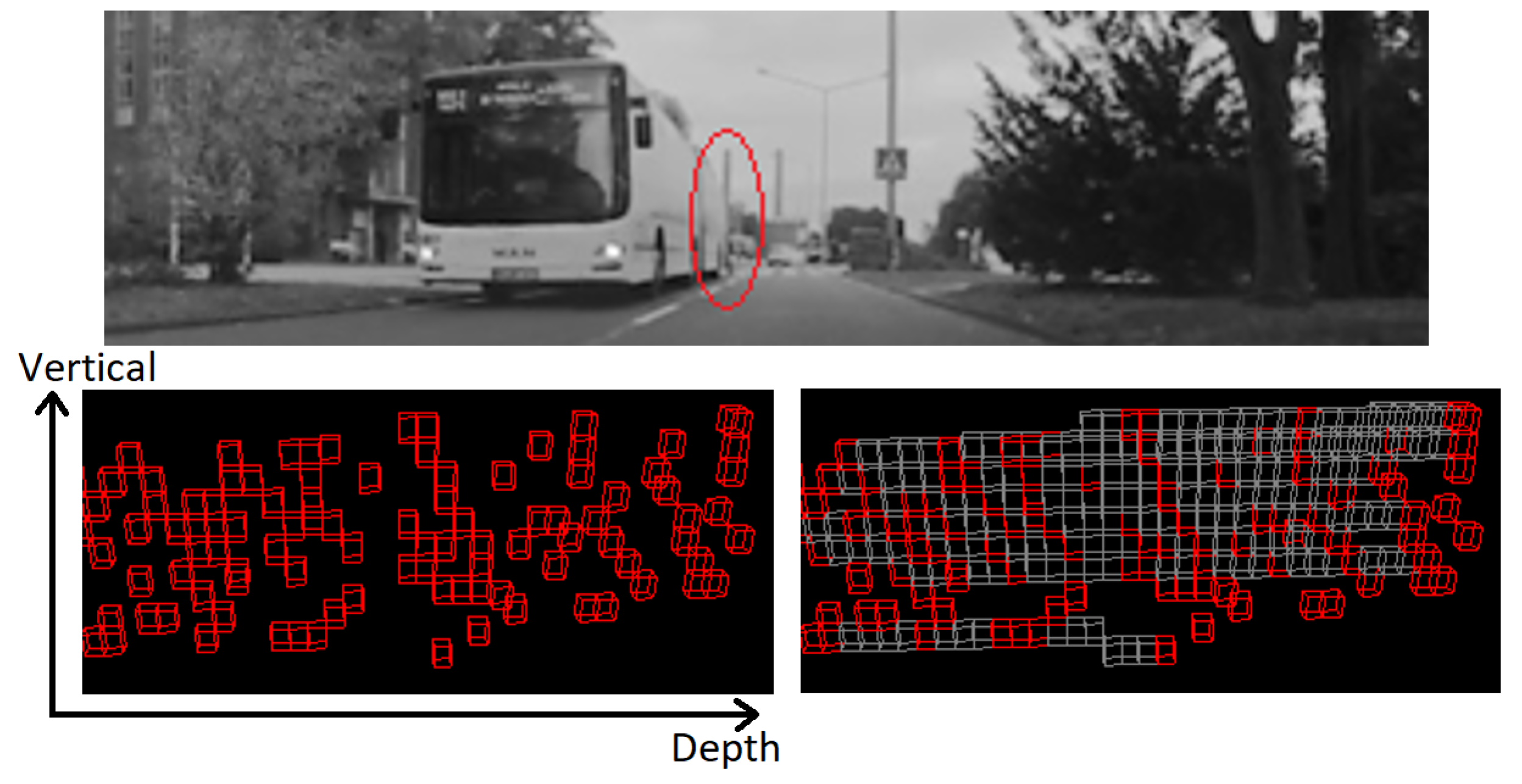
The Geometric and Semantic Fusion module aggregates data from the two execution threads and generates the spatio-temporal and appearance-based representation (STAR) by projecting all the motion-corrected 3D points onto every raw and segmented image using the associated calibration parameters of each sensor (see Figure 9). This process, which attaches RGB and semantic information to all points that project onto the 2D data, can become a computational bottleneck, prompting us to use a complex, multi-threaded execution scheme, that takes place for each received 3D cloud once 2D segmentation results become available.Equations (54)–(76) present the mechanism for projecting 3D points pci onto the unwarped images based on the cylindrical image plane representation, using the camera intrinsic matrix Kcam and the 3D coordinate transform TLcam, provided by the calibration procedure for each pair of camera cam and LiDAR L. Here, the function point_to_cylinder computes coordinates at which rays extending towards pci intersect the cylindrical surface of the (modelled) image plane.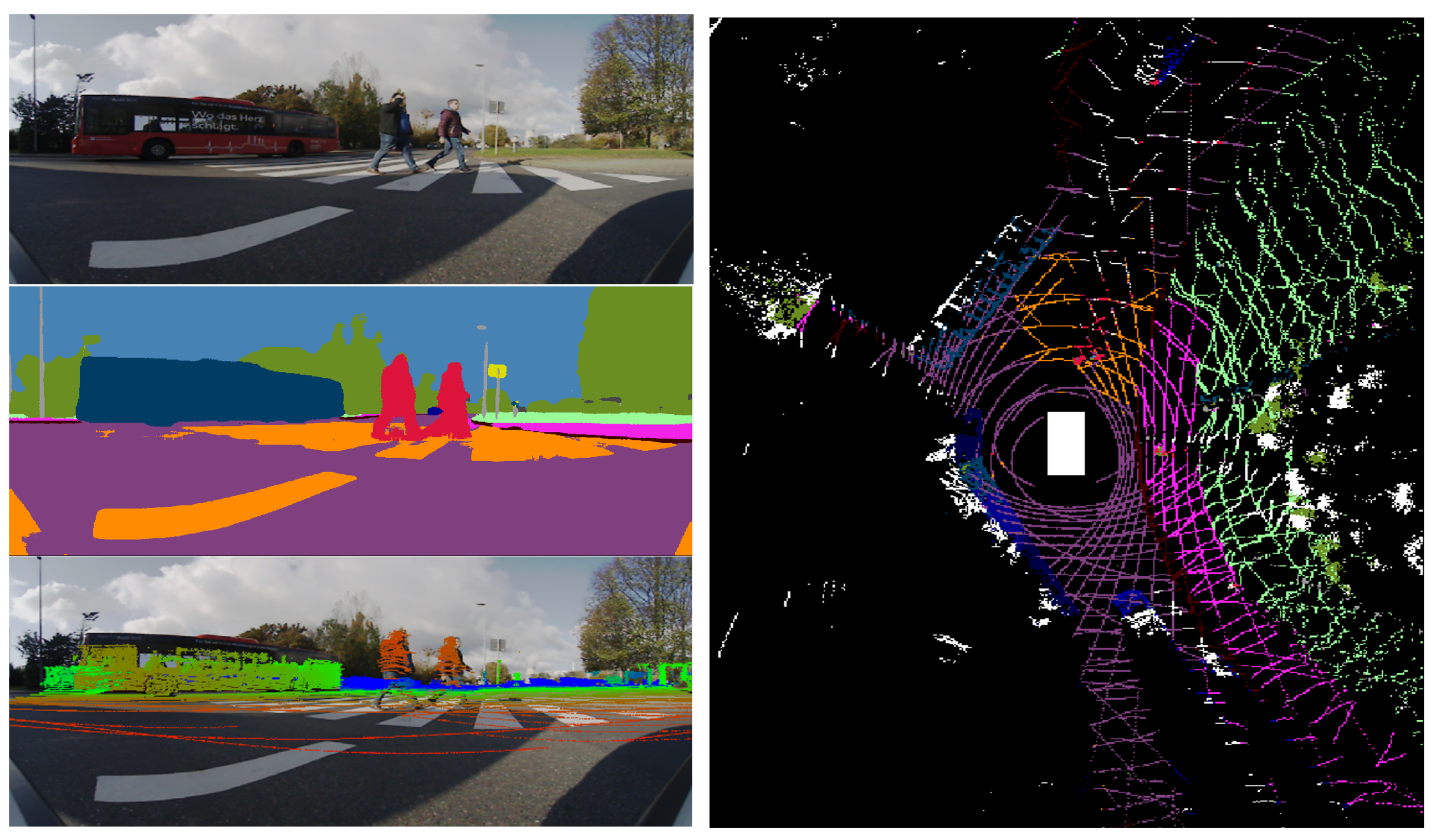 Figure 9. The Low-level fusion process: Raw and semantic information from the camera is fused with the projected 3D points (left column, from (top) to (bottom)) to produce an enhanced 3D point cloud (STAR, (right)).Occlusion handling is an important practical problem which arises during sensor fusion and wthe researchers address it with two different approaches. They both use semantic and depth information: one fast approach relying on projecting onto a low-resolution virtual image and one more costly approach which applies corrections to each image column. Semantic labels from occluding objects seen in camera images can be mistakenly propagated to 3D points belonging to the occluded objects during the information fusion process between the LiDAR point cloud and semantic segmentation images. The occlusion handling algorithm presumes objects to be either static or that their position has been corrected (which in turn requires additional information). The sparse depth map (raw) representation, denoted by D(x;y) is obtained by projecting the 3D measurements onto each image, sparsely adding distance information to pixels where possible, with the other pixels marked accordingly. An intermediary operation aims to increase the density of the depth map by considering cells of fixed size s (e.g., 10 × 10 px) and constructing a lower-resolution depth map by taking the minimum distance in each cell. In practice, this can be implemented by creating the low-resolution image directly, which reduces computation time significantly and achieves the same results. The low-resolution image has values equal to the local minimum in an s by s box:Besides sparsity, another common problem is the lack of measurements due to non-reflective surfaces of objects from the scene. To address this issue wthe researchers propose two correction schemes: one based on the dilation of the measurements and the other based on convex hull estimation. Since LiDAR point layers fall farther apart onto objects which are closer, measurements are dilated in the horizontal and vertical direction based on the distance. The dimensions of the dilation kernel are given by: drows=min(4;20/dist),dcols=min(1;5/dist), where dist is the distance of the 3D point, making the the window size inversely proportional to it (the scalar values were selected empirically, with a higher kernel size needed on the vertical direction due to higher sparsity). This operation does not affect the execution time significantly since it only applies to points within a 20 m range. Semantic information allows us to treat each object class differently. Occluding objects can only be from the following semantic classes: construction, pole, traffic light, traffic sign, person, rider, car, truck, bus, train, motorcycle, bicycle, building or vegetation. Point measurements from other classes, such as road or lane markings, cannot occlude other objects. Occlusions are detected using the generated dense depth map by simply marking projected points which have a larger distance than the corresponding cell from the depth map as occluded. Semantic classes associated to such points should be ignored as they originate from an occluding object. Figure 10 illustrates the resulting low-resolution depth map.An alternative, more computationally costly, approach was also implemented. It performs a column-wise completion and relies on estimating the lower envelope of the measurements for a single object based on the semantic labels. More precisely, wthe cresearchers consider each column from the depth map and segment it according to the semantic labels. For each segment, after finding the lower envelope wee the researchers update the depth values to match those from the envelope. This predicts the depth linearly between two measurement points and eliminates farther measurements.
Figure 9. The Low-level fusion process: Raw and semantic information from the camera is fused with the projected 3D points (left column, from (top) to (bottom)) to produce an enhanced 3D point cloud (STAR, (right)).Occlusion handling is an important practical problem which arises during sensor fusion and wthe researchers address it with two different approaches. They both use semantic and depth information: one fast approach relying on projecting onto a low-resolution virtual image and one more costly approach which applies corrections to each image column. Semantic labels from occluding objects seen in camera images can be mistakenly propagated to 3D points belonging to the occluded objects during the information fusion process between the LiDAR point cloud and semantic segmentation images. The occlusion handling algorithm presumes objects to be either static or that their position has been corrected (which in turn requires additional information). The sparse depth map (raw) representation, denoted by D(x;y) is obtained by projecting the 3D measurements onto each image, sparsely adding distance information to pixels where possible, with the other pixels marked accordingly. An intermediary operation aims to increase the density of the depth map by considering cells of fixed size s (e.g., 10 × 10 px) and constructing a lower-resolution depth map by taking the minimum distance in each cell. In practice, this can be implemented by creating the low-resolution image directly, which reduces computation time significantly and achieves the same results. The low-resolution image has values equal to the local minimum in an s by s box:Besides sparsity, another common problem is the lack of measurements due to non-reflective surfaces of objects from the scene. To address this issue wthe researchers propose two correction schemes: one based on the dilation of the measurements and the other based on convex hull estimation. Since LiDAR point layers fall farther apart onto objects which are closer, measurements are dilated in the horizontal and vertical direction based on the distance. The dimensions of the dilation kernel are given by: drows=min(4;20/dist),dcols=min(1;5/dist), where dist is the distance of the 3D point, making the the window size inversely proportional to it (the scalar values were selected empirically, with a higher kernel size needed on the vertical direction due to higher sparsity). This operation does not affect the execution time significantly since it only applies to points within a 20 m range. Semantic information allows us to treat each object class differently. Occluding objects can only be from the following semantic classes: construction, pole, traffic light, traffic sign, person, rider, car, truck, bus, train, motorcycle, bicycle, building or vegetation. Point measurements from other classes, such as road or lane markings, cannot occlude other objects. Occlusions are detected using the generated dense depth map by simply marking projected points which have a larger distance than the corresponding cell from the depth map as occluded. Semantic classes associated to such points should be ignored as they originate from an occluding object. Figure 10 illustrates the resulting low-resolution depth map.An alternative, more computationally costly, approach was also implemented. It performs a column-wise completion and relies on estimating the lower envelope of the measurements for a single object based on the semantic labels. More precisely, wthe cresearchers consider each column from the depth map and segment it according to the semantic labels. For each segment, after finding the lower envelope wee the researchers update the depth values to match those from the envelope. This predicts the depth linearly between two measurement points and eliminates farther measurements.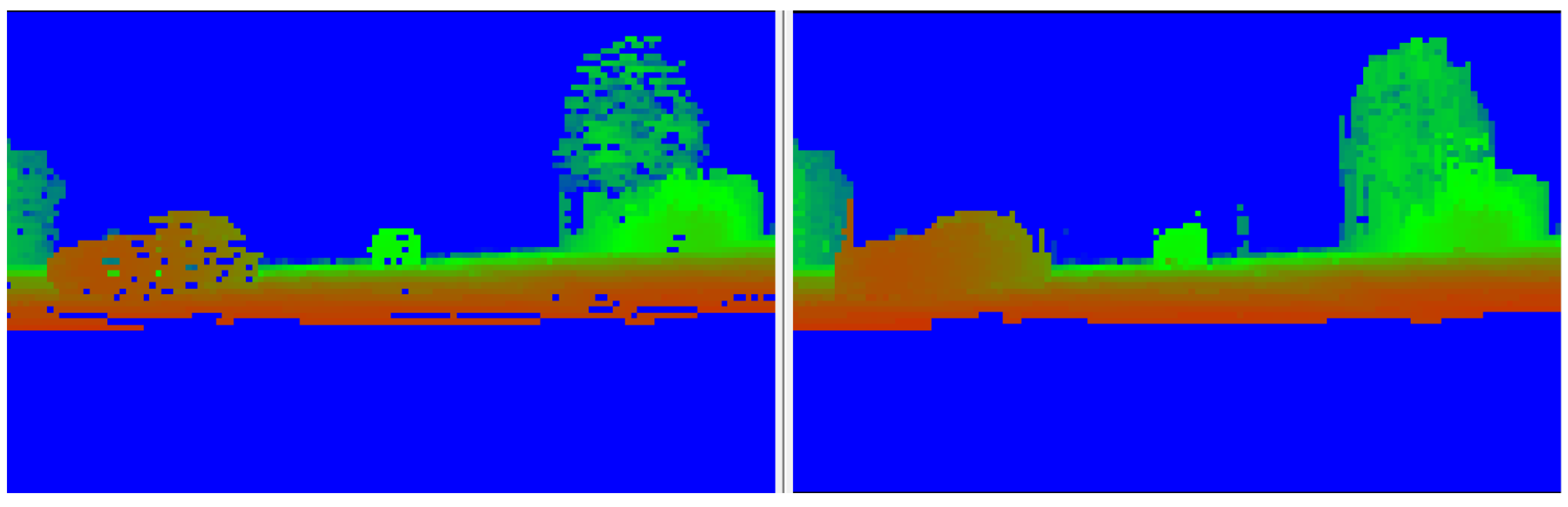 Figure 10. Low resolution depth map and its corrected version - scene depicts a car close by on the left, a car in the middle farther away and foliage on the right. Color encodes the distance from red (close) to blue (far), up to 20 m. Positions with no measurements default to infinity.
Figure 10. Low resolution depth map and its corrected version - scene depicts a car close by on the left, a car in the middle farther away and foliage on the right. Color encodes the distance from red (close) to blue (far), up to 20 m. Positions with no measurements default to infinity.2.7. STAR-Based Classification and Enhanced Detection
Once the LiDAR measurements are enhanced with semantic information while also considering occlusions, the process of object classification can be performed in order to provide class labels to each object cuboid. In order to increase robustness to outliers caused by mislabeled 3D measurements (such as those on the border of dynamic obstacles or on thin objects), a statistical method is adopted. The following steps are performed for computing the semantic class for each detected object:-
The semantic class is first transferred from the individual 3D measurements to their corresponding voxels, handling conflicting measurements by labeling the entire containing voxel as unknown
-
A semantic class frequency histogram is generated for each 3D obstacle, based on the contained voxels, enabling a statistical based approach for the final decision step:
- -
-
The most frequent class is selected as the 3D object class
- -
-
Up to 3 additional, most likely classes can be also provided, allowing further refinement of the object class during subsequent tracking processes
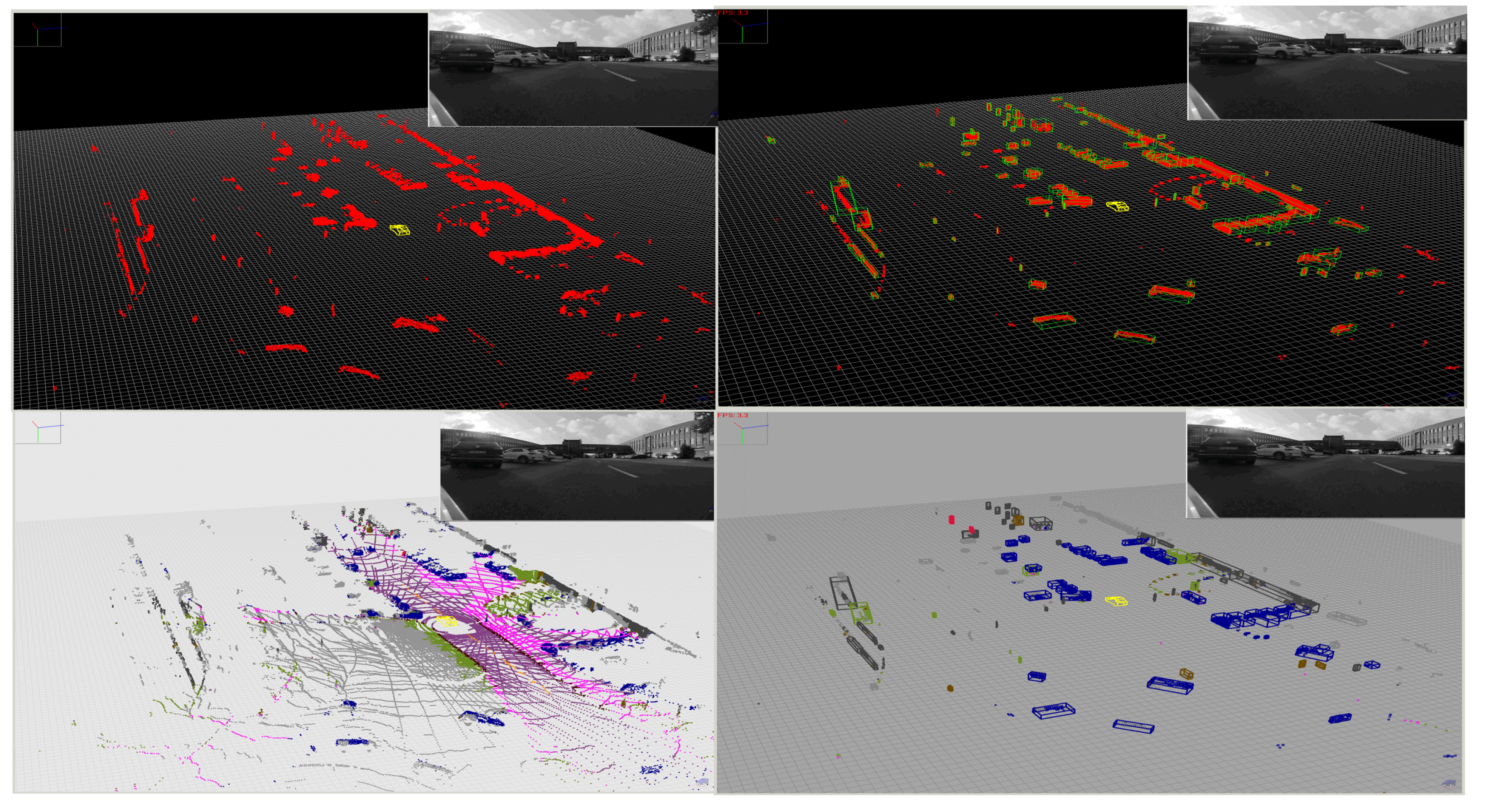 Figure 11. Results of Object Detection and Classification. Top-Left: Input LiDAR Point Cloud, Bottom-Left: STAR Point Cloud, Top-Right: Segmented Objects, Bottom-Right: Classified Objects.
Figure 11. Results of Object Detection and Classification. Top-Left: Input LiDAR Point Cloud, Bottom-Left: STAR Point Cloud, Top-Right: Segmented Objects, Bottom-Right: Classified Objects.
References
- UP-Drive H2020 European Union Program—Grant 688652. Available online: https://up-drive.ethz.ch/ (accessed on 8 June 2022).
- Buerki, M.; Schaupp, L.; Dymczyk, M.; Dube, R.; Cadena, C.; Siegwart, R.; Nieto, J. Map Management for Efficient Long-Term Visual Localization in Outdoor Environments. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018.
- Varga, R.; Costea, A.; Florea, H.; Giosan, I.; Nedevschi, S. Super-sensor for 360-degree environment perception: Point cloud segmentation using image features. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8.
- Moravec, J.; Šára, R. Robust maximum-likelihood on-line LiDAR-to-camera calibration monitoring and refinement. In Proceedings of the Computer Vision Winter Workshop, Ceský Krumlov, Czech Republic, 5–7 February 2018; pp. 1–9.
- Kukelova, Z.; Heller, J.; Bujnak, M.; Fitzgibbon, A.; Pajdla, T. Efficient solution to the epipolar geometry for radially distorted cameras. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2309–2317.
- EB Assist ADTF-Automotive Data and Time-Triggered Framework. Available online: https://www.elektrobit.com/products/automated-driving/eb-assist/adtf/ (accessed on 8 June 2022).
- Goga, S.E.C.; Nedevschi, S. Fusing semantic labeled camera images and 3D LiDAR data for the detection of urban curbs. In Proceedings of the 2018 IEEE 14th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 6–8 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 301–308.
- Schaupp, L.; Pfreundschuh, P.; Bürki, M.; Cadena, C.; Siegwart, R.; Nieto, J. MOZARD: Multi-Modal Localization for Autonomous Vehicles in Urban Outdoor Environments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4828–4833.
- Florea, H.; Varga, R.; Nedevschi, S. Environment Perception Architecture using Images and 3D Data. In Proceedings of the 2018 IEEE 14th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 6–8 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 223–228.
- Arsigny, V.; Commowick, O.; Ayache, N.; Pennec, X. A fast and log-euclidean polyaffine framework for locally linear registration. J. Math. Imaging Vis. 2009, 33, 222–238.
- Petrovai, A.; Nedevschi, S. Semantic Cameras for 360-Degree Environment Perception in Automated Urban Driving. IEEE Trans. Intell. Transp. Syst. 2022, 1–13.
- Romera, E.; Alvarez, J.M.; Bergasa, L.M.; Arroyo, R. ERFNet: Efficient Residual Factorized ConvNet for Real-Time Semantic Segmentation. IEEE Trans. Intell. Transp. Syst. 2018, 19, 263–272.
- Fu, C.Y.; Shvets, M.; Berg, A.C. RetinaMask: Learning to predict masks improves state-of-the-art single-shot detection for free. arXiv 2019, arXiv:1901.03353.
- Costea, A.D.; Petrovai, A.; Nedevschi, S. Fusion Scheme for Semantic and Instance-level Segmentation. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3469–3475.
- Oniga, F.; Nedevschi, S. A Fast Ransac Based Approach for Computing the Orientation of Obstacles in Traffic Scenes. In Proceedings of the 2018 IEEE 14th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 6–8 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 209–214.