Light fields play important roles in industry, including in 3D mapping, virtual reality and other fields. However, as a kind of high-latitude data, light field images are difficult to acquire and store. Compared with traditional 2D planar images, 4D light field images contain information from different angles in the scene, and thus the super-resolution of light field images needs to be performed not only in the spatial domain but also in the angular domain. In the early days of light field super-resolution research, many solutions for 2D image super-resolution, such as Gaussian models and sparse representations, were also used in light field super-resolution. With the development of deep learning, light field image super-resolution solutions based on deep-learning techniques are becoming increasingly common and are gradually replacing traditional methods. In this paper, the current research on super-resolution light field images, including traditional methods and deep-learning-based methods, are outlined and discussed separately.
- light field
- image super-resolution
- deep learning
- convolutional neural networks
1. Introduction
2. Traditional Method
2.1. Projection-Based LFSR
The spatial resolution of the sub-aperture image is limited by the microlens resolution. The geometric projection-based approach calculates sub-pixel offsets between sub-aperture images of different views, based on which pixels in adjacent views can be propagated to the target view for super-resolution processing of the target view. Lim [19][28] indicatedthat the angular data in the 2D dimension of the light field contains information about the sub-pixel offsets of images in the spatial dimension from different viewpoints. After extracting this information, the light field image can be super-resolution processed by projection onto convex sets (POCS) [20][29]. Nava [9][13] proposed a new super-resolution focus stack based on Fourier slice photographic transformation [21][30] and combined it with multi-view depth estimation to obtain super-resolution images. Pérez [22][31] extended the Fourier slicing technique to the super-resolution work of the light field and provided a new super-resolution algorithm based on Fourier slicing photography and discrete focus stack transform.2.2. Priori-Knowledge Based LFSR
During the shooting process of the light field camera, due to the interference of external factors, such as the environment, light, and jitter, the obtained light field images often have low resolution and varying degrees of noise disturbance. In order to reconstruct a more realistic view with high resolution, a method based on a prior hypothesis was proposed. This type of method used the special high-dimensional structure of the 4D light field while adding priori assumptions about the actual shooting scene, and then proposed a mathematical model to optimize the solution of the super-resolution problem of the light field. Boominathan [23][41] used a low-resolution LF camera and a high-resolution digital single-lens reflex (DSLR) camera to form a hybrid imaging system and used a patch-based algorithm to combine the advantages of the two cameras to produce high-resolution images. The method proposed by Pendu [24][42] based on the Fourier parallax layer model [25][43] can simultaneously solve various types of degradation problems in a single optimization framework.3. Deep-Learning-Based Method
The prosperous development of deep learning has promoted the development of image super-resolution. The super-resolution convolutional neural network (SRCNN) proposed by Dong [26][44] in 2014 represented the end-to-end mapping between low/high resolution images. As shown in Figure 34 below, in order to learn this mapping, only three steps are required: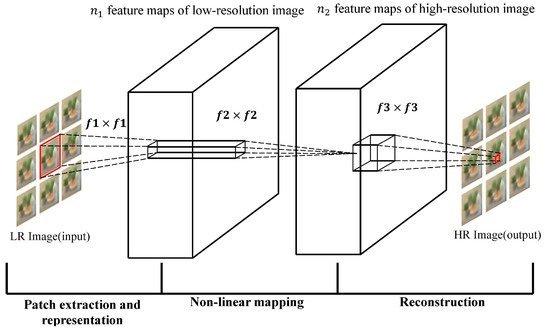
- 1.
-
Patch extraction and representation: This operation extracts patches from low-resolution images and expresses them as high-dimensional vectors. The dimensionality of the vector is equal to the number of feature maps.
- 2.
-
Non-linear mapping: This operation can non-linearly map the high-dimensional vector extracted in 1 to another high-dimensional vector, and each mapping vector can conceptually represent a high-resolution patch; these mapping vectors form another set of feature maps.
- 3.
-
Reconstruction: This operation will operate the high-resolution patch set obtained in Step 2 to generate the final high-resolution image.
 Overall framework of LFCNN [22].The special feature of LFCNN is that no matter how the depth and space of the scene change, the specific network layer used for angle and spatial resolution enhancement can restore the sub-aperture image well, thereby, improving the resolution of the image space domain and angular domain at the same time.
Overall framework of LFCNN [22].The special feature of LFCNN is that no matter how the depth and space of the scene change, the specific network layer used for angle and spatial resolution enhancement can restore the sub-aperture image well, thereby, improving the resolution of the image space domain and angular domain at the same time.3.1. Sub-Aperture-Image-Based LFSR
3.1.1. Intra-Image-Similarity-Based LFSR
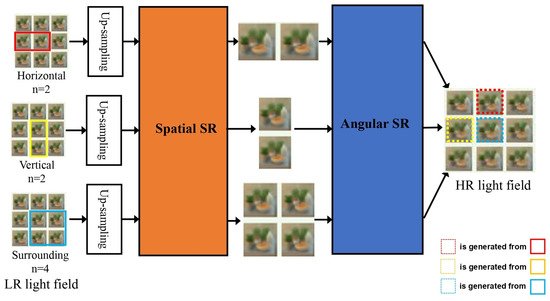
Early light field super-resolution methods based on deep learning usually divide different sub-tasks for processing, and the results of the sub-tasks work together to generate the final high-resolution light field image. As shown in Figure 57, the network model proposed in this period usually contains two network branches to process the angular domain and the spatial domain of the light field. The networks designed by Gul [30][52], Ko [31][60], and Jin [32][61] all follow this processing idea. Gul [30][52] used light field images with low angular resolution and low spatial resolution as the input of the network.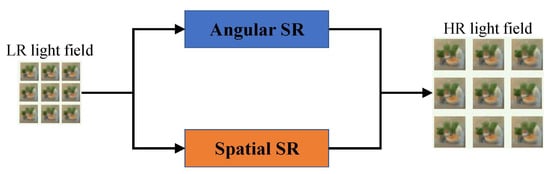 Figure 57.Network model of light field super resolution with two sub-network branches.First, through the angular SR network, a new sub-aperture image is synthesized by interpolation and the output has low spatial resolution and high angular resolution. The spatial SR network takes the output of the angular SR network as input, improves the spatial resolution of each sub-aperture image through training, and finally outputs a light field image with high spatial resolution and high angular resolution. The AFR module can perform feature remixing on the multi-view features extracted by the network through the disparity estimator according to the angular coordinates. The network can generate high-quality super-resolution images regardless of the angular coordinates of the input view images. The method proposed by Jin [32][61] used two sub-network modules to model the complementary information between views and the parallax structure of the light field image, while fusing the complementary information between views, the original parallax structure of the light field is preserved. In addition to processing the angular domain and the spatial domain of the light field separately, there are also some methods that treat the two as an interconnected whole. Yeung [33][62] used four-dimensional convolution to characterize the high-dimensional structure of the light field image and designed a special feature extraction layer that can extract the joint spatial and angular features on the light field image to perform super-resolution processing of the light field image.
Figure 57.Network model of light field super resolution with two sub-network branches.First, through the angular SR network, a new sub-aperture image is synthesized by interpolation and the output has low spatial resolution and high angular resolution. The spatial SR network takes the output of the angular SR network as input, improves the spatial resolution of each sub-aperture image through training, and finally outputs a light field image with high spatial resolution and high angular resolution. The AFR module can perform feature remixing on the multi-view features extracted by the network through the disparity estimator according to the angular coordinates. The network can generate high-quality super-resolution images regardless of the angular coordinates of the input view images. The method proposed by Jin [32][61] used two sub-network modules to model the complementary information between views and the parallax structure of the light field image, while fusing the complementary information between views, the original parallax structure of the light field is preserved. In addition to processing the angular domain and the spatial domain of the light field separately, there are also some methods that treat the two as an interconnected whole. Yeung [33][62] used four-dimensional convolution to characterize the high-dimensional structure of the light field image and designed a special feature extraction layer that can extract the joint spatial and angular features on the light field image to perform super-resolution processing of the light field image.3.1.2. Inter-Image-Similarity-Based LFSR
Ordinary image SR based on deep learning tends to exploit only the external phase between images, i.e., training the network with many image datasets, thus embedding the natural image prior into the neural network model. Although for general image SR, better super-resolution performance can be obtained by only using the external similarity of the image; however, this is not sufficient for processing complex light field SR. There is also a high degree of similarity between different angle views in the light field, i.e., the internal similarity of the light field. The internal similarity of the light field provides a wealth of information for super-resolution of each view. Therefore, comprehensive utilization of the internal and external similarities of the light field can greatly improve the performance of the learning-based light field SR. As shown inFigure 6, Fan [34] divides the light field super-resolution processing into a two-stage task, using external similarity and internal similarity in the two stages of the task. In the first stage, the VDSR network is trained to use the external similarity to enhance the view, and in the second stage, the max-pooling convolutional neural network (MPCNN) is trained so that it can use the internal similarity to further enhance the target view from the information of the neighboring views.9, Fan [53] divides the light field super-resolution processing into a two-stage task, using external similarity and internal similarity in the two stages of the task. In the first stage, the VDSR network is trained to use the external similarity to enhance the view, and in the second stage, the max-pooling convolutional neural network (MPCNN) is trained so that it can use the internal similarity to further enhance the target view from the information of the neighboring views.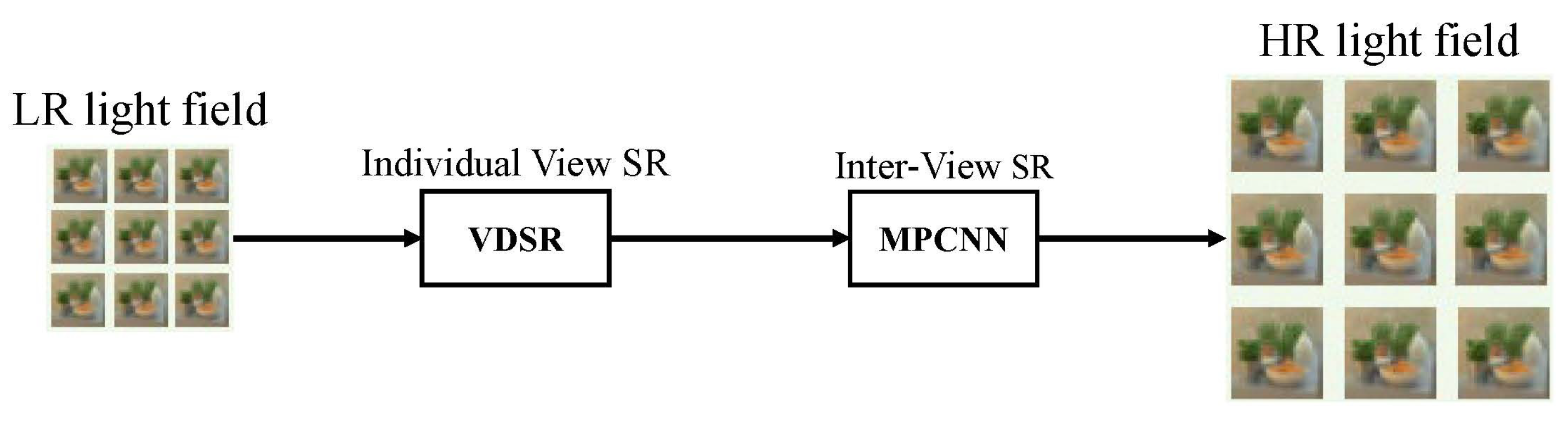
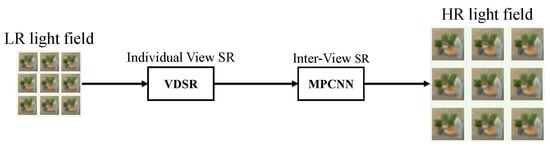 Network structure proposed by Fan [53].
Network structure proposed by Fan [53].3.2. Epipolar-Plane-Image-Based LFSR
EPI is a 2D slice of a 4D light field with a constant angle and spatial direction, which contains the depth information of the scene; therefore, it is usually used for the depth estimation of the light field; however, some researchers attempt to apply it to light field super-resolution tasks.Wafa [35][80] designed an end-to-end deep-learning model to process all sub-aperture images at the same time, and used EPI information to smoothly generate views. Yuan [36][54] used EPI to restore the geometric consistency of light field images lost in SISR processing and proposed a network framework consisting of SISR deep CNN and EPI enhanced deep CNN. Inspired by the non-local attention mechanism [37][81], Wu [38][82] computed attention non-locally on the epipolar plane pixel by pixel, thus generating an attention map of the spatial dimension and guiding the reconstruction of the corresponding angular dimension based on the generated attention map.4. Data Set and Comparison
4.1. Data Set
In chronological order, the current main light field data sets available for training and testing include: HCI old [39][49], STFlytro [40][83], EPFL [41][51], HCI [42][50], 30scenes [43][68]. Among them, HCI old, HCI, and 30scenes belong to the synthetic image data set, and the images of STFlytro and EPFL come from real-world images collected by a camera. The data set list is shown in Table 12.Table 12.Overview of the light field super-resolution data sets.
23 shows the comparison between traditional method and deep-learning-based method. Traditional methods are mainly based on expert experience and prior knowledge, which can achieve better reconstruction quality at local details; however, the overall quality is sacrificed. Deep-learning-based methods can automatically reconstruct image by training network over huge amount of data, and the reconstructed image usually has a quality improvement at both local and global scale. In addition, compared with traditional methods, deep-learning-based method has faster processing speed when faced with a large batch of LSFR tasks.Data Set Years Number of Scenes Shooting Method HCI old [39] HCI old [49] 2013 13 Blender Synthesis STFlytro [40] STFlytro [83] Table 23.Comparison of traditional methods and deep-learning-based methods for light field image super resolution.Traditional Method Deep-Learning-Based Method Reconstruction Quality Good detail but poor
overall qualityGood detail and overall quality 2016 9 Lytro Illum Advantages No training required.
Process explainable.Automatic feature extraction.
Parallel processing.EPFL [41] EPFL [51] 2016 10 Lytro Illum Disadvantages Relying on expert experience.
Weak generalization ability.
Poor robustness.High computational complexity.
Relying on dataset.HCI [42] HCI [50] 2016 24 Blender Synthesis 30scenes [43] 30scenes [68] 2016 30 CNN Synthesis 4.2. Comparison
TableAs for performance, several traditional and deep-learning-based LFSR works are selected for comparison, as shown in Table 34. The ×2 SR ratio is chosen. PSNR and SSIM are evaluation metrics.
Table 34. Performance comparison of light field super-resolution algorithms, where best results are in bold and “-” means not tested. The five methods above are traditional methods, while others are deep learning based methods.Dataset HCI Old
(PSNR/SSIM)HCI (PSNR/SSIM) EPFL (PSNR/SSIM) STF Lytro (PSNR/SSIM) Method Mitra [44] Mitra [35] 29.60/0.899 - - 25.70/0.724 Wanner [45] Wanner [48] 30.22/0.901 - - - Wang [46] Wang [34] 35.14/0.951 - - - farrugia [47] farrugia [40] 30.57/- - - 32.13/- Pendu [24] Pendu [42] 38.64/- 36.77/- - - Yoon [18] Yoon [22] 37.47/0.974 - - 29.50/0.796 Wang [48] Wang [23] 36.46/0.964 33.63/0.932 32.70/0.935 30.31/0.815 Zhang [49] Zhang [24] 41.09/0.988 36.45/0.979 35.48/0.973 - Kim [27] Kim [45] 40.34/0.985 34.37/0.956 32.01/0.959 29.99/0.803 Ko [31] Ko [60] 42.06/0.989 37.21/0.977 36.00/0.982 - Jin [32] Jin [61] - 38.52/0.959 - 41.96/0.979 Yeung [33] Yeung [62] - - - 40.50/0.977 Wang [50] Wang [57] 44.65/0.995 37.20/0.976 34.76/0.976 38.81/0.983 Zhang [51] Zhang [66] 42.14/0.981 37.01/0.963 35.81/0.961 - Fan [34] Fan [53] 40.77/0.968 - - - Cheng [52] Cheng [70] 36.10/- - 30.41/- - Ma [53] Ma [58] 43.90/0.993 40.49/0.986 41.38/0.989 - Jin [54] Jin [73] - - - 34.39/0.951 Cheng [55] Cheng [59] 40.03/- 37.94/- 34.78/- 38.05/- Ribeiro [56] Ribeiro [69] 45.49/0.964 38.22/0.956 34.41/0.953 - Farrugia [57] Farrugia [75] - - - 32.41/0.884 Meng [58] Meng [56] - 32.45/- 34.20/- - Wu [59] Wu [27] - - - 42.48/- Zhu [60] Zhu [55] - - - 33.04/0.958 Wafa [35] Wafa [80] 39.76/0.968 - - 44.45/0.995 Yuan [36] Yuan [54] 38.63/0.954 - - 40.61/0.984 Meng [61] Meng [77] 33.12/0.913 34.64/0.933 35.97/0.947 38.30/0.969 Kim [62] Kim [67] - - - 39.25/0.990 Jin [63] Jin [74] 41.80/0.974 37.14/0.966 - -