Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Shitharth Selvarajan and Version 3 by Amina Yu.
Electric vehicles are becoming increasingly necessary in today’s generation systems, with the process of E-vehicles being used not only in automobile manufacturing companies, but also in the design of underwater vehicular technology. Floating photovoltaic in the presence of PV panels is the process of knowstudying underwater systems with solar panels.
- underground vehicles
- hydrophone
- sensing unit
1. Introduction
Floating photovoltaic in the presence of PV panels is the process of studying underwater systems with solar panels. The process of improving hydrophone sensor networks is divided into three phases: hardware, controller, and operational stages. Underwater vehicles are implemented in the hardware section with sensor inputs that are handled without the use of an external controller. A loading procedure employing human and vehicle systems is combined in a single operational platform in the next phase, which is connected to control and state operation. The array of sensor subsystems will absorb the designing process and construction opportunities with respect to task requirements in both of the previously described segments. Even with all localised platform underwater vehicles, in addition to sensing capabilities, they can execute a variety of duties, such as clearing a wreck deep below the sea. However, this type of autonomous process necessitates a large number of sensors, which can be avoided by building hydrophone systems with commercial electronic components. The main rationale for avoiding multiple units is that redundant parameters are found to be lower, ensuring a continuous development process.
The modification of modern hydrophone systems will address a number of existing system flaws, such as an insufficient decision-making mechanism. Additional duties with operational units will include data collecting and the installation of monitoring cables to check for the presence of multiple trawls. There are many procedures and utensils that are available for tracking the underwater vehicle, whereas the proposed method builds a navigational communication system that discovers the depth of the ocean using assimilated navigation technologies. If the above-mentioned inventive awareness is introduced in the field of ocean monitoring systems, then it will save many individual lives as the people travelling in the ocean can find the depth of immersion and a warning signal will be issued in case more depth is found. In addition, the underwater vehicle which travels inside the water will discover the harmful sea faunas that are present in any nearby locations. The above-mentioned navigation and discovery process will happen only if proper output points are located, and this step is termed as critical stage monitoring systems. The critical objective case will be operated at low energy as solar panels are installed with vehicular systems, and the battery operated will be designed as the water-resistant model. Moreover, the ideas will give better reliable solutions as multiple output points are tracked and connected as an internal graph where the underwater vehicle automatically travels with the marked points. As a result, hydrophone systems in this category are capable of making probabilistic judgements in any watery marks, hence meeting high objective requirements. The process of hydrophone sensor systems is depicted in Figure 1.
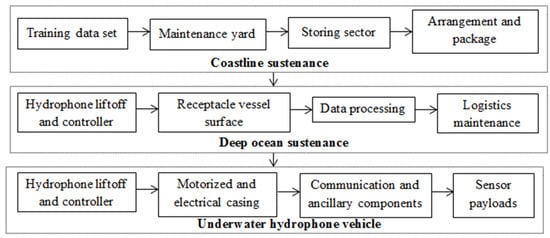
Figure 1.
Integration of hydrophone sensors in underwater sustenance.
2. Existing Approaches
A deep examination of multiple existing methodologies has been compared with the suggested way to better understand the design aspect of hydrophones employing solar systems. In [1], the authors have examined an experimental study where the charge for operating underwater vehicles will go down as deep oceanic operations are present. Therefore, a design attempt is made using mobile aqua charging where the wave energy will be converted, thus making the procedure suitable for an autonomous surface. However, with charging points the electrical parameters are not defined; therefore, no information about the threshold levels can be obtained. Following a review of several literatures in the construction field, it is clear that one or two researchers have implemented in real time, while other cases are being investigated. The authors of [2] describe the development of a low-energy solar intellectual gadget for all terrestrial situations that uses a cloud storage technology known as the Internet of Things (IoT). When an underground monitoring system is built, however, wireless data sharing is not allowed, and the nodes that communicate with sensing devices will move in relation to the critical point focus. Because estimating the depth of saltwater is challenging, the underwater solar boat must be designed using floating components. As a result, a floating solar panel [3] has been proposed as a cost-effective alternative to renewable energy sources in situations where the energy load demand limitation criterion is met. Despite the fact that the movement of panels is precise due to temperature and wind speed monitoring, the approach has no explanation for the data monitoring system, which is a major goal for subterranean water monitoring systems. As a result, solar panels can only float in the upper section of the ocean, while the lower part of the ocean remains in the same condition.
An autonomous subterranean vehicle [4] has been built to display the situation of underground water and monitor the condition deep inside the ocean for lengthy periods of time. The behavior-based approach, in which a neural network analyses the navigation conditions, is used to plan the autonomous vehicle. In addition, solar panels are incorporated to save more energy. However, such a created method can only measure the state of water, and the monitored data cannot be transferred to the central station in a timely manner. The data are then processed using an image processing technique [5] with the same construction design in the next stage. Additionally, colour identification algorithms for various trawls and obstacles have been integrated with a monitoring system that offers clear information for appropriate signal control. In contrast, a separate power supply for processing images is to be attached for charging it; therefore, a system has been devised for charging the sensing devices [6] using solar panels, where more energy may be saved without any expulsion. Even with different types of water technology, the same technique will perform better by monitoring characteristics like temperature, pollutants, and water volume.
Further real-time research has been carried out on Nasser Lake [7] by placing floating solar panels, where the energy of solar panels is created in an automated manner while saving a greater amount of water. The aforementioned impact saves 16 percent energy and so provides an excellent solution for underwater monitoring using floating technology. Despite the fact that energy savings are maximised, the data processing strategy is not slanted in any portion of the procedures, and such designs will only satisfy industrial needs. In response to the aforementioned worry, a practical solution has been developed to meet the demands of all persons in aquatic farms [8]. The aforementioned method focuses on multi-modal fusion technology by combining sensors into fuzzy systems with Monte-Carlo simulations used for the estimate. Because the position of the underwater vehicle is properly fixed, a navigation analysis has been performed, resulting in a suitable application solution for underwater monitoring systems. However, the method proposed for utilising many sensors is subject to a number of restrictions, making the procedure difficult in any context. A recurrent neural network has been integrated to address the complexity by estimating the state of error in the presence of filters [9]. The main goal of employing the filters is to lower the amount of noise in underground tube-shaped signals so that clear signal localization may be determined.
A prototype system has been developed to evaluate underwater systems using the perception of a gyroscopic energy scavenging device [10]. This type of small-scale technology has a high rate per minute elevation capacity while also ensuring unconstrained autonomous vehicle movement thanks to the vertical positioning axis. As a result, the model only produces useful results when it is positioned vertically, and ignores the influence when it is positioned horizontally. As a result, a hybrid system has been built by combining solar systems with robotic technology [11], and it is difficult to examine the effect present inside it owing to the lack of source stations. Fundamental results, on the other hand, demonstrate the efficacy of robotic technology when used as an alternative to traditional methods. To address the lack of charging stations, a wireless sensor technology with 10 different sensor nodes has been proposed [12]. At this time, it is assumed that wireless technologies will have a greater impact on signals with less noise consumption, and that monitoring systems will be able to reach a depth of roughly 30 metres. Then, utilising the same wireless stations, advancements in robotic technology were produced [13], and the behaviour of cloud technology for watching such transitions with industry connections resulted in reduced resource allocation. The next step was to develop a self-triggered model using the predictive control technique [14]. The predictive control approach was created to provide closed loop system solutions using time reduction tactics. In [15], comparisons with traditional approaches were made, and the goal of adding underwater autonomous systems was discussed. All of the approaches indicated in the comprehensive assessment are unable to give information on the handling of nuclear waste found in underwater systems. As a result, a sensor-based nuclear waste detection system that ensembles for all environmental circumstances has been built.
3. Background
Previously [16], an intelligent decision-making approach using a machine learning algorithm has been introduced for monitoring the aquaculture fishes. The process of monitoring involves an automatic monitoring system, and, in this procedure, the underwater vehicle is not integrated. However, in the proposed method an underwater vehicle has been introduced with hydrophone sensors where the presence of aqua faunas can be monitored, and images are directed to the desired servers. The major difference between the proposed method and the basic approach in [16,17,18,19,20,21,22,23,24,25] is the way that sensors are used in the introduced systems. In the proposed technique, a probability-based approach is used with an underwater vehicle for monitoring all the necessary parameters, whereas in the basic approach decision-making algorithms are used for determining the threshold levels and the same system is rationalized for effective computations.