Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Eladio Durán Aranda and Version 2 by Rita Xu.
Multiple-output DC–DC converters are essential in a multitude of applications where different DC output voltages are required. The interest and importance of this type of multiport configuration is also reflected in that many electronics manufacturers currently develop integrated solutions. Traditionally, the different output voltages required are obtained by means of a transformer with several windings, which are in addition to providing electrical isolation. However, the current trend in the development of multiple-output DC–DC converters follows general aspects, such as low losses, high-power density, and high efficiency, as well as the development of new architectures and control strategies.
- DC–DC converters
- multiple outputs
- applications
1. Introduction
Multiple-output DC–DC converters are fundamental in electric power supply, distribution, management, and power delivery systems. They are essential in applications such as: Intermediate Bus Architecture (IBA), Distributed Power Architectures (DPA), Dynamic Bus Architecture (DBA), Central Control Architecture (CCA), Datacom and Telecom, Light-Emitting Diodes (LEDs), consumer electronics products, battery chargers, or even Electric Vehicles (EV). These converters are used for USB power delivery, I/O, CPUs, FPGAs, ASICs, and other low-voltage devices, applications where controllability, efficiency, reliability, and miniaturization are critical.
Undoubtedly, the development of power switch semiconductor technologies has also contributed significantly to more efficient switching and has facilitated a higher frequency operation. This has allowed the development of applications where multiple-output DC–DC converters are used, considering mainly three aspects: high-power density, high efficiency, and small size. The increase in the rating of power devices, such as Insulated Gate Bipolar Transistors (IGBT) and Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) technologies, has allowed innumerable applications to be addressed in the last 40 years. They have helped to improve energy efficiency and CO2 reductions, in commercial, residential, transportation systems, industrial, military, aerospace, computer systems, lighting, and vehicle applications. MOSFET and IGBT, either as power modules or within discrete devices, have been the preferred technologies for high and medium power applications. IGBTs are used in applications of high-current, with voltages over 1 kV and up to 10 kVA, while MOSFETs are used in applications below 1 kV, but they are the most suitable in applications of high switching frequency, between 10–100 kHz.
Although silicon-based technologies have improved enormously in the recent years, and still continue to improve, this development will be restricted, ultimately, by silicon technology limitations [1]. Among the semiconductor materials with the greatest future potential are those with a Wide Band Gap (WBG), particularly Gallium Nitride (GaN) and Silicon Carbide (SiC). The physical properties of WBG materials make them especially suitable for high switching frequency and high-power applications, also giving them high resistance to high temperatures, lower switching losses, with low reverse recovery and low on-resistance, a better relationship between breakdown voltage (VBD) and on-resistance (RDS(ON)), lower cooling requirements, and with low parasitic inductance. Applications where broadband technology is experiencing a considerable growth are: in the lighting sector (using GaN based LEDs); in the generation (transmission and distribution of electrical energy, where SiC devices present significant improvements in energy efficiency of the electrical network); and hybrid and fully electric vehicles (where GaN and SiC-based devices are essential elements, both in the propulsion and energy distribution systems of the vehicle).
The interest in DC–DC converters with multiple outputs is reflected in the sub-cited analysis and numerous publications, both from the academic, research, and economic/business world [2][3][4][5][6][7][8][9][10][11][2,3,4,5,6,7,8,9,10,11], as well as from industry and manufacturer publications [12][13][14][15][16][17][12,13,14,15,16,17]. The most recent forecasts estimate that the market for DC–DC converters is expected to increase at a CAGR (Compound Annual Growth Rate) of 12.1% in the next five years, from $9.9 billion in 2021 to $17.6 billion in 2026, and that the market for industrial power supply is expected to increase at a CAGR of 6.9% in the same period, from $7.0 billion in 2021 to $9.7 billion in 2026, with multiple-output DC–DC converters being one of the segments with the highest growth rate during the same period [18][19][20][21][22][23][24][25][26][27][28][29][30][18,19,20,21,22,23,24,25,26,27,28,29,30]. This growth is due to very different sectors and applications, such as storage and servers, battery management, healthcare and medical equipment, railway traction, beverage and food, information technology and telecom, transportation, consumer electronics, energy and utilities, defense and aerospace, machine tools, and security systems. Mobile Phone Industry and Internet of Things (IoT) are applications where DC–DC converters help to extend battery life. Also, the lighting sector through technology Light-Emitting Diode (LED) and Organic LED (OLED), which has provided more reliable and efficient light sources, is also an important sector. Moreover, the demand for DC–DC converters with multiple outputs in the automotive industry is driven by electric vehicles, such as Fuel Cell Electric Vehicle (FCEV), Battery Electric Vehicles (BEV), Plug-in Hybrid Vehicles (PHEV), and Hybrid Electric Vehicle (HEV).
All these applications contemplate various aspects and types of DC–DC converters, such as output number (dual-output, bipolar output, three- and four-output-type converters), power (<1 kW, 1–10 kW, 10–20 kW, and >20 kW) including low, medium, and high power, input voltage (<40 V, 40–70 V, and >70 V), output voltage (24 V, 15 V, 12 V, 5 V, and 3.3 V), isolated (one switch, two switches, and four switches converters) and non-isolated (one switch or several switches) DC–DC converters. In low-power applications, the two main trends are related to high-power density and low voltage, while in high power, with high efficiency and reliability. But the main trend is related to miniaturization for integration. Small size and weight, together with high-power density are very important items in power supplies for small format applications, mobile electronic systems, and onboard systems, driven by applications with facilities with space restrictions such as More-Electric Aircraft (MEA), Electric Vehicle (EV), Robotics, Electric Ship (ES), Robotics, Solid-State Lighting, Integrated DC–DC Power Supply and Monolithic Power Systems, Intelligent DC–DC Power Distribution (micro or nano grids), On-chip Power Supply, Wireless Remote Sensing Node and Power Transfer, New Transport Technologies, Energy Harvesting, and IoT. In these applications, multiple or single power systems are used, which distribute energy to different loads, with converters operating in power ranging from hundreds of kilowatts to a few watts. This focus on multiple-output DC–DC converter applications has also led to the development and commercialization of integrated solutions by many electronic manufacturers [31][32][33][34][35][36][37][38][39][40][41][42][31,32,33,34,35,36,37,38,39,40,41,42], and to different tutorials, webinars, on-line publications, white papers and some surveys, reviews, and overviews papers being reported in the literature.
2. Multiple-Output DC–DC Converters: Topologies and Configurations
The main objective of DC–DC power conversion is to transfer electric power from a DC source into another DC source, which can be a load, with the highest efficiency and therefore lowest losses. The DC–DC converters are widely used at all power levels (from mW to kW), current levels (from nA to hundreds of amps) and voltage levels (from mV to kV) and have been very popular for the last three decades, they can invert the polarity of the DC voltage and increase or decrease its magnitude. The topologies and properties of DC–DC converters are reported in the literature and are well known. Topology describes how source, load, inductive and capacitive elements, and switches are interconnected in the converter, while the configuration establishes the DC conversion relation between the input and output current/voltage and according to the operating mode and the converter topology. Efficiency depends on how close converter elements are to ideal condition; assuming that the same elements are available, efficiency is related to the converter topology. Switch electrical stress (current and voltage) decides the choice of semiconductor devices used to implement the switches. For lower losses on parasitic resistances, lower generated noise, and more efficient filtering, it is preferred that input and output waveforms be continuous (ideally, DC only). Complexity of a converter is measured by the number of inductors, capacitors, and switches. Efficiency and density (watts/volume) have long been the metrics used to compare the performance of power converters. DC–DC converters can be classified depending on the number of inputs as Multiple-Input and Single-Output (MISO), or Single-Input and Single-Output (SISO), depending on the number of outputs as Single-Input and Multiple-Output (SIMO), or Multiple-Input and Multiple-Output (MIMO). In all cases, they can provide one or more output voltages, from one or more input voltages. Multiple-output DC–DC converters are of interest in applications that require several outputs, from one or more input voltages, which include configurations MIMO [43][44][45][46][43,44,45,46] and SIMO [47][48][49][50][51][47,48,49,50,51]. As it is showed in Figure 1, SIMO DC–DC converters can be classified into isolated and non-isolated, depending on whether they are implemented with or without an electrical isolation, by means of a transformer, generally operated at high frequency. The output/input power range is often used as the main aspect when selecting a topology. However, there are many other factors that influence the topology selection for an isolated multi-output DC–DC power converter, such as: electrical stress, size, cost, input voltage range, and output noise. The size of an isolated multi-output power converter mainly depends on the transformer size and the number of active switches employed, while for a non-isolated converter depends on the number of active switches employed. The utilization of the power transformer affects the size of the power converter. A high-frequency transformer provides galvanic isolation between input and output, and allows increasing the step-up conversion ratio, while coupled inductors can also be used to increase the step-up ratio in a DC conversion and provide different output voltages from several secondary windings.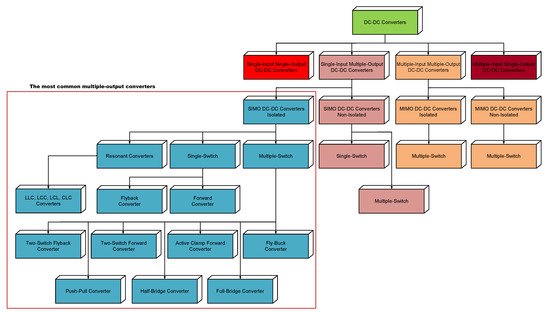
Figure 1. Multiple-Output DC–DC Converters Classification.
2.1. SIMO DC–DC Converters Isolated
Isolated SIMO DC–DC converter topologies can be denominated as either double-ended or single-ended, based on the use of the magnetization curve (B-H curve, flux density versus magnetic field strength), as shown in Figure 2. During the operation, if the flux oscillates in two quadrants of the B-H curve (Figure 2a), then the topology is called as double-ended. While, if the flux oscillates in only one quadrant of the B-H curve (Figure 2b), then the topology is called as single-ended. In general, for given operating conditions, a single-ended topology requires a greater core than a double-ended topology and needs an additional reset winding.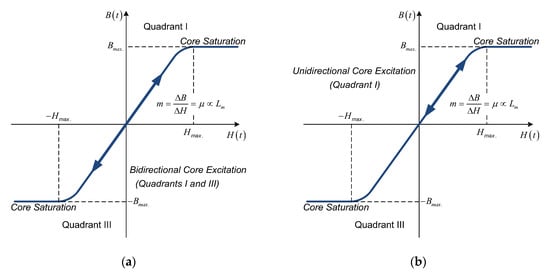
Figure 2. B-H Curve (without hysteresis) of Transformer Core. (a) Bidirectional Core Excitation. (b) Unidirectional Core Excitation.
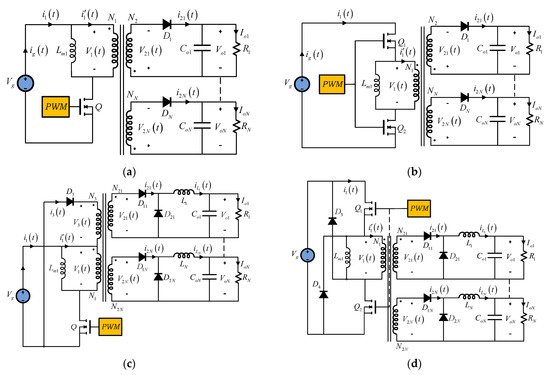
Figure 3. Multiple-Output Isolated DC–DC Converters Topologies. (a) Single-Switch Flyback Converter. (b) Two-Switch Flyback Converter. (c) Single-Switch Forward Converter. (d) Two-Switch Forward Converter.
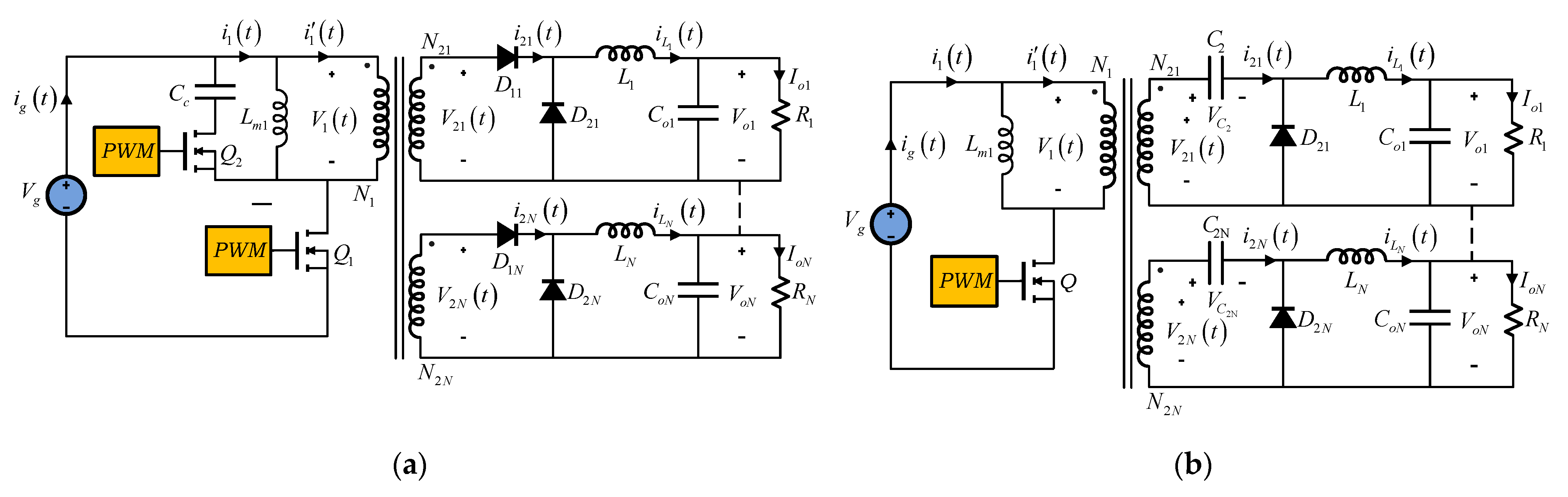
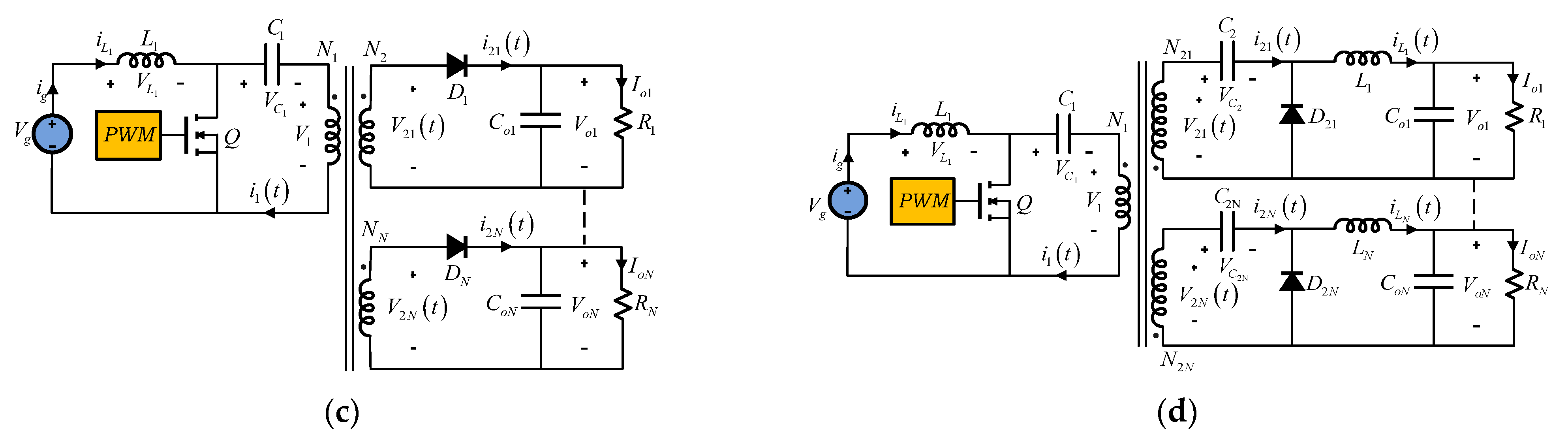
Figure 4. Multiple-Output Isolated DC–DC Converters Topologies. (a) Active Clamp Forward Converter. (b) Isolated Zeta Converter. (c) Isolated SEPIC Converter. (d) Isolated Ćuk Converter.
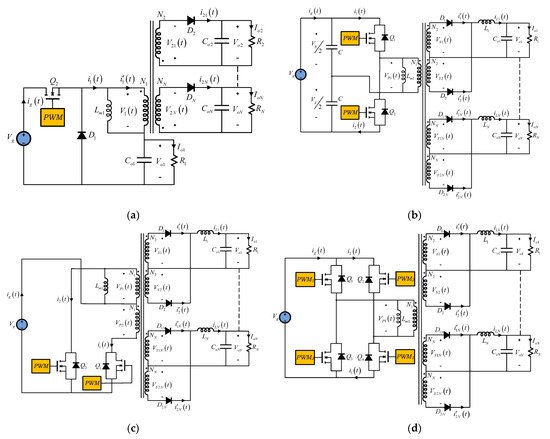
Figure 5. Multiple-Output Isolated DC–DC Converters Topologies. (a) Isolated Buck (Fly-Buck) Converter. (b) Half-Bridge Converter. (c) Push–Pull Converter. (d) Full-Bridge Converter.
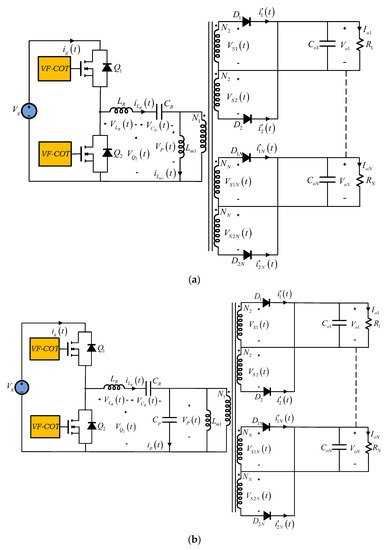
Figure 6. Three-element Multiple-Output Isolated Resonant DC–DC Converters: LLC and LCC. (a) LLC Resonant DC–DC Converter. (b) LCC Resonant DC–DC Converter.
2.2. SIMO DC–DC Converters Non-Isolated
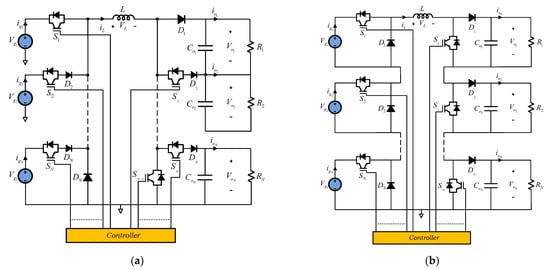
Multiple-output converters without transformers are an alternative in applications where galvanic isolation is not required. In this sense, non-isolated multiple-output converters can be implemented with single switch or multiple switches, with their advantages and disadvantages. As an example, multiple switches require several control switches, which increases the cost, losses, and number of gate drivers in the converter, while single-switch converters cause higher stress in terms of voltage and current. SIMO non-isolated with multiple switches converters have been developed for many applications and in different configurations and topologies [57][58][59][60][61][62][63][64][57,58,59,60,61,62,63,64]. They can provide space savings, while maintaining high efficiency. They are generally based on traditional Single-Input Single-Output (SISO) structures such as Buck, Boost, Buck–Boost and cascade Buck–Boost, as shown in Figure 7. Each output voltage is a function of a fraction of the duty cycle of the switch to which it is connected. By having several switches, different switching strategies (time sequencing [65] and time-multiplexing [66]) and operation modes (CCM and DCM) are applicable.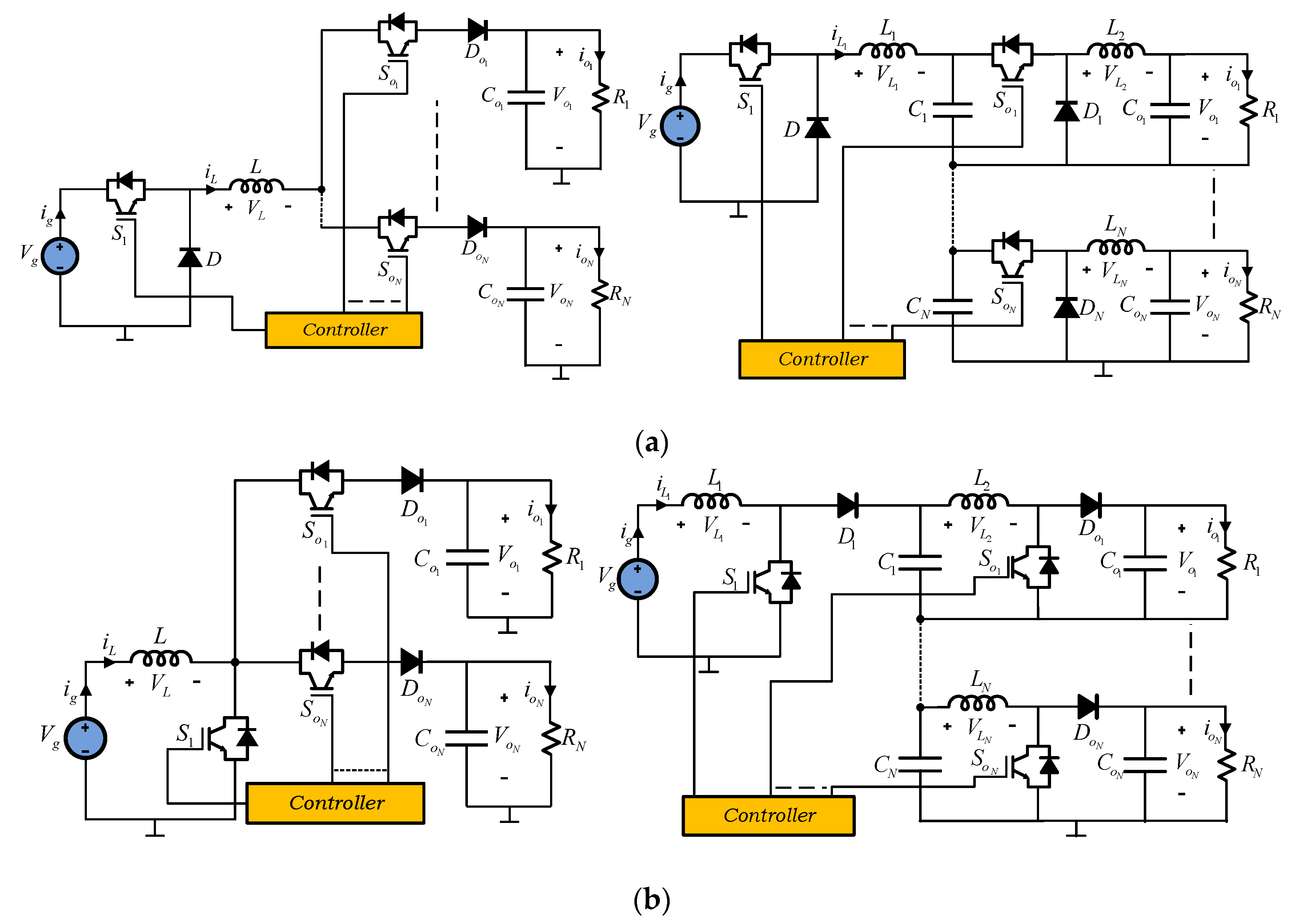
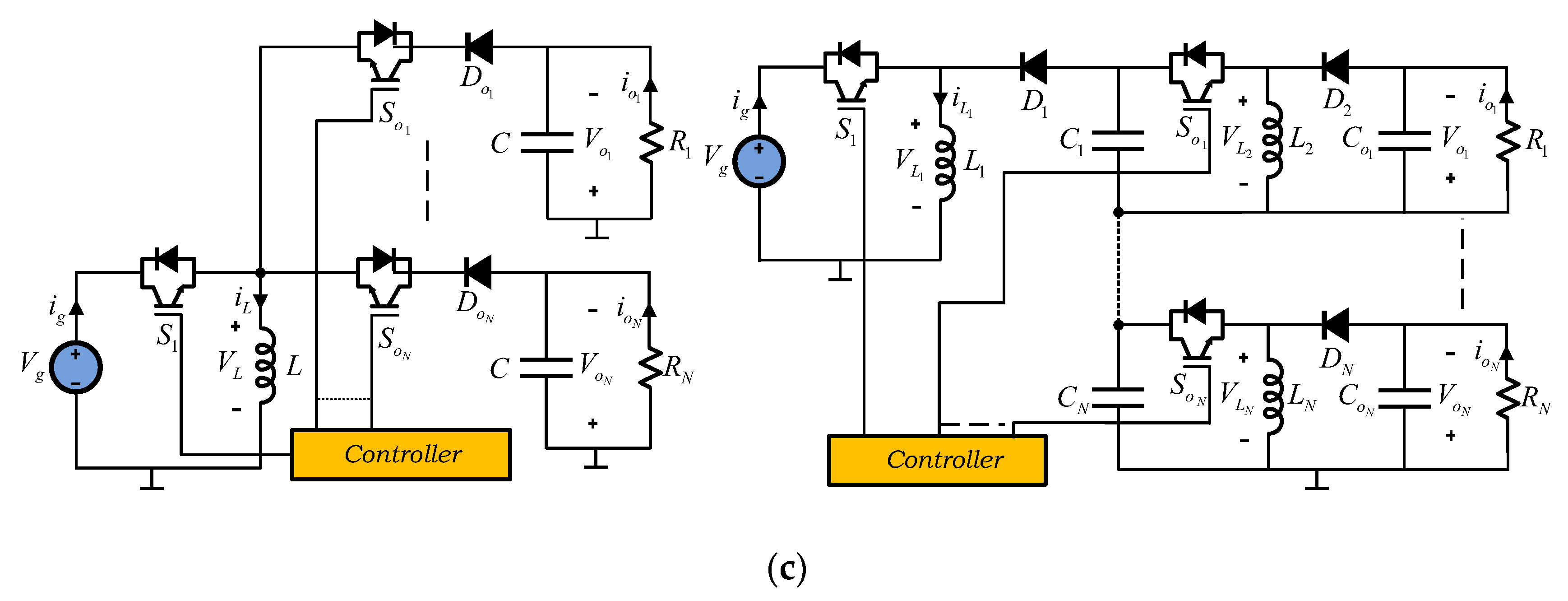
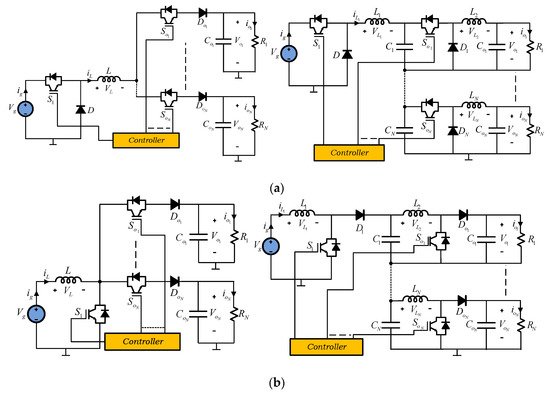
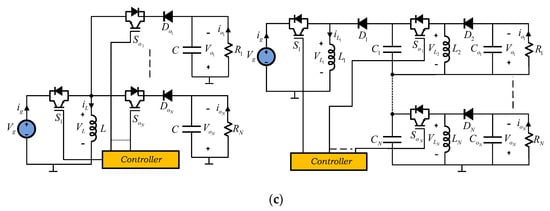
Figure 7. Single Input Multiple-Output (SIMO) non-isolated multiple switches DC–DC converters. (a) SIMO Buck Converter versions [57]. (b) SIMO Boost Converter versions. (c) SIMO Buck–Boost Converter versions.
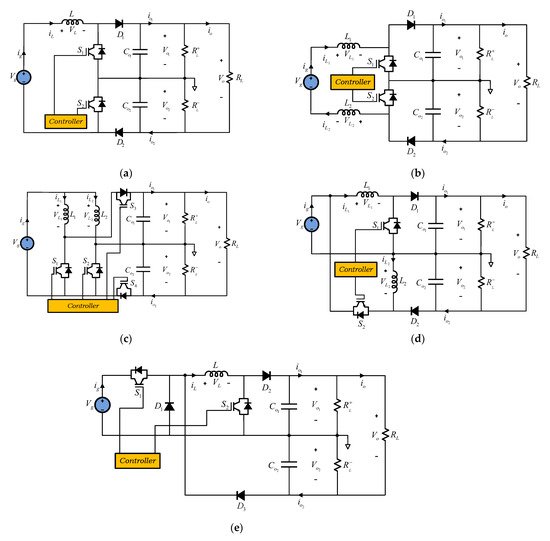
Figure 8. Single Input Dual Output (SIDO) DC–DC Converters. (a) Three-level Single-inductor Boost Converter [69]. (b) Three-level Two-inductors Boost Converter [70]. (c) Dual-output DC–DC Boost Converter [71]. (d) Series-combined Boost and Buck–Boost Converter [72]. (e) Single-inductor Buck–Boost Converter [73].
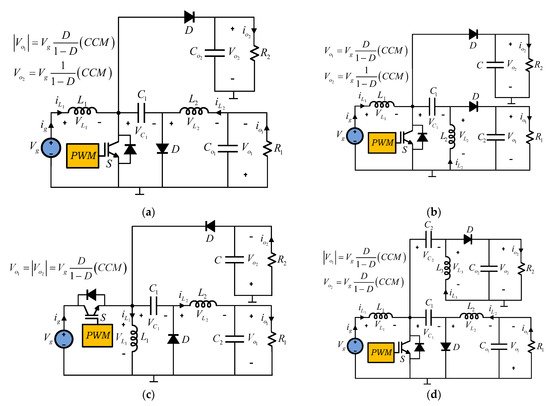
Figure 9. Two-output-type converter combinations. (a) Boost–Ćuk converter combination. (b) Boost–SEPIC converter combination. (c) Buck–Boost–Zeta converter combination. (d) SEPIC–Ćuk converter combination.
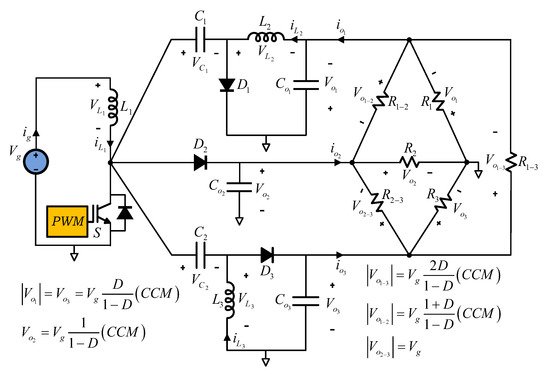
Figure 10. Three-output-type converter combination for six loads.
2.3. MIMO DC–DC Converters Isolated
In the same way, MIMO DC–DC converters for combining various output loads and input sources, they have become an interesting alternative in recent years, especially because they allow the integration of different sources, such as: Rectifiers, Photovoltaic Systems, Fuel Cells, Batteries, Supercapacitors, and, in some cases, Wind Energy Systems. Fundamentally, MIMO converters are implemented according with two structures: sharing a high voltage or low voltage common DC bus; and sharing one or more transformers; or both architectures are also possible. MIMO isolated configurations use a multi-winding transformer to transfer the energy from the primary side to the secondary side and to couple the different sources and loads, with several power switches and centralized or distributed control signals. Several configurations can be derived from Full-Bridge, Half-Bridge Push–Pull Forward and Flyback topologies, and other such as those shown in Figure 11 [81][82][81,82]. These converters consist of Boost, Half-Bridge, or the called Boost–Dual-Half-Bridge (BDHB) topologies. In these converters, the conversion ratio and output voltages depend on the control strategy of the power switches, operation modes, and the turns ratio between the transformer windings. Normally, the power switches are controlled by phase-shifted PWM operating at 50% duty cycle, in CCM and DCM.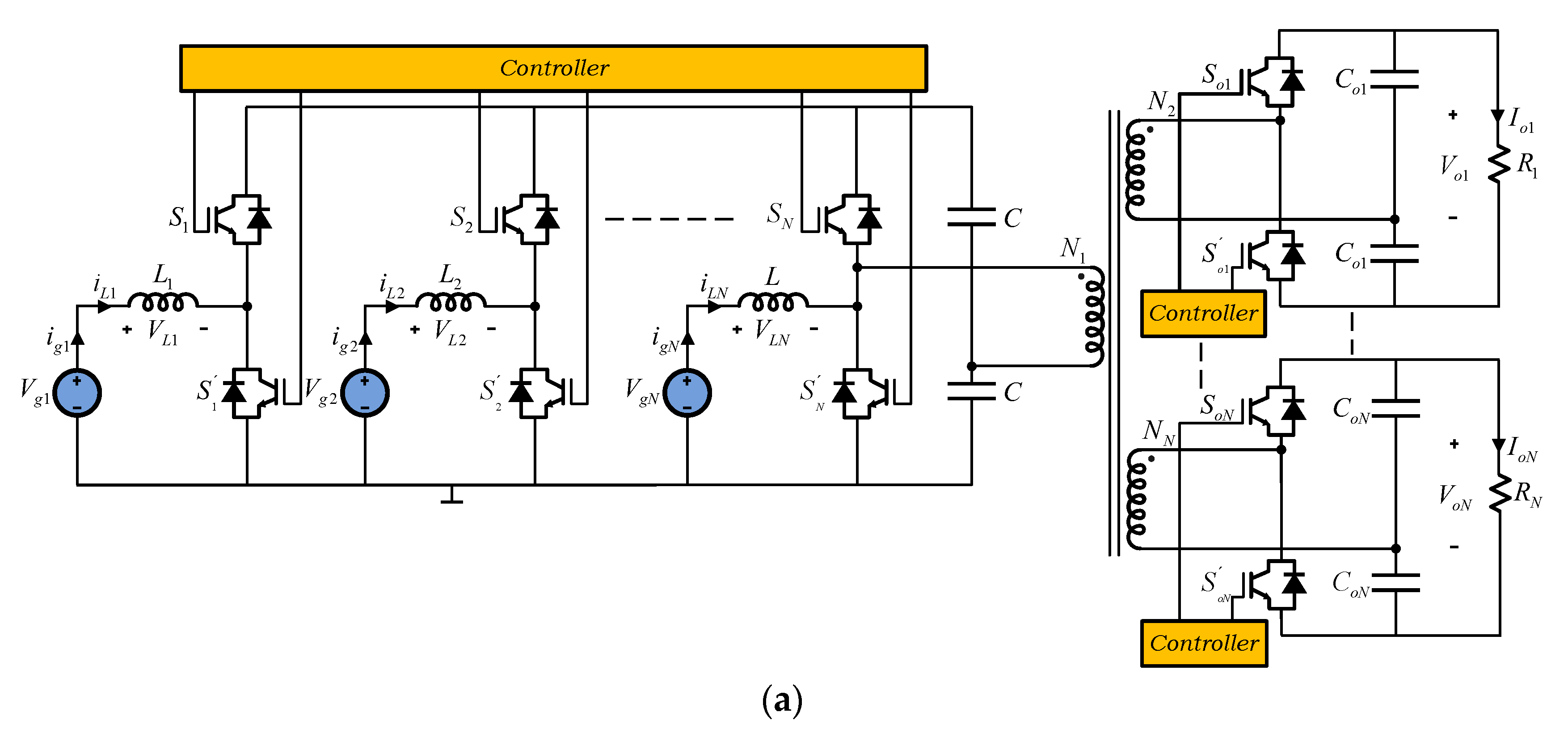
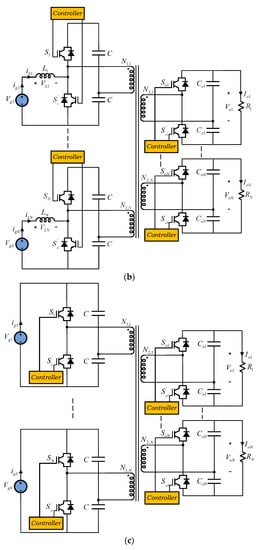
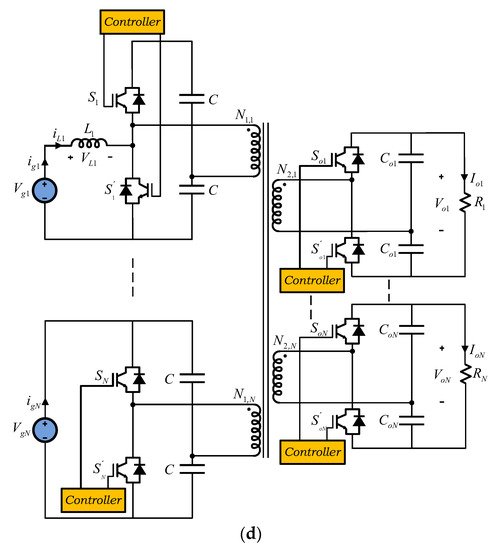
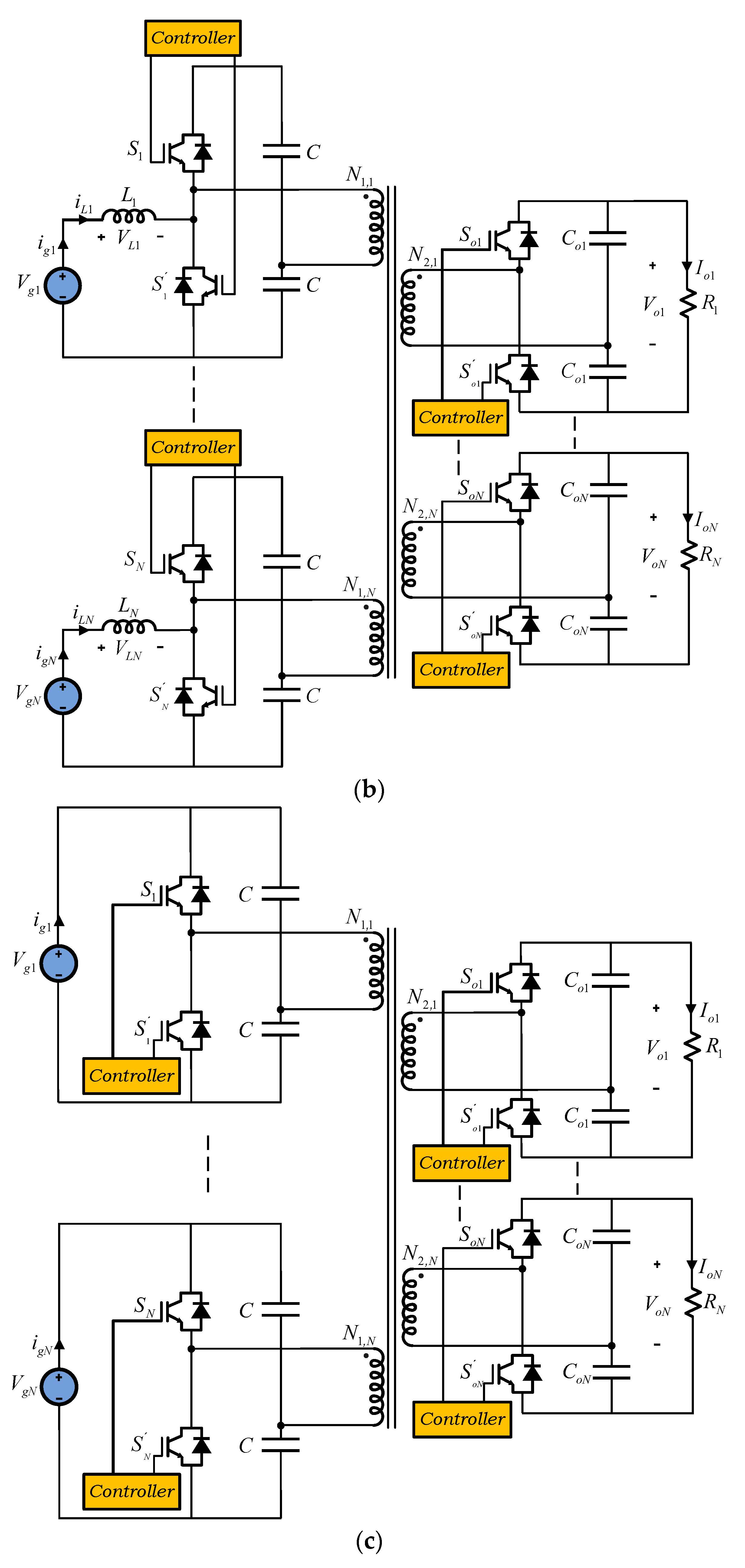
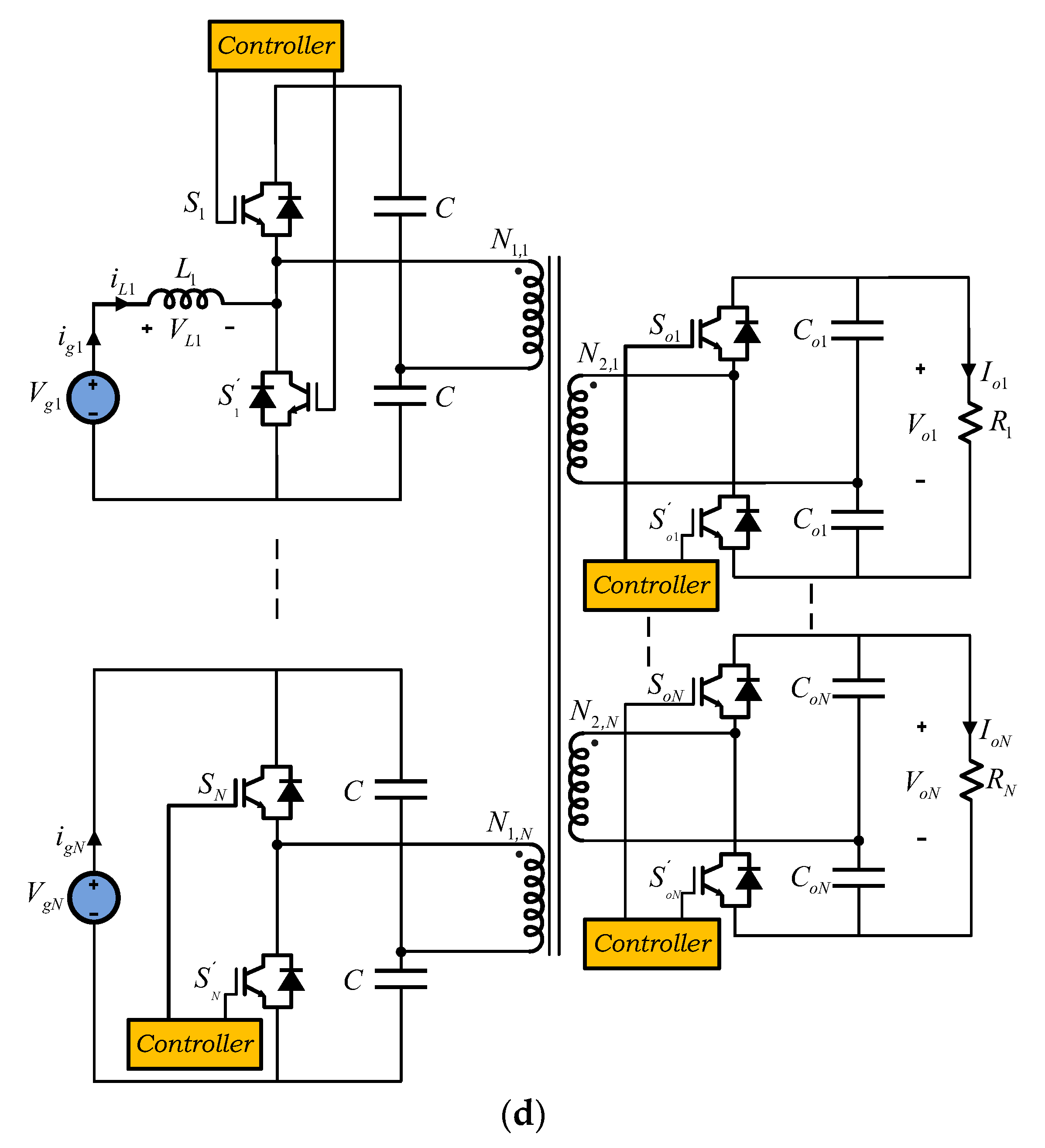
Figure 11. MIMO isolated. (a) Boost parallel converter. (b) Boost ports converter. (c) Half-Bridge converter. (d) Boost–Half-Bridge converter combination.