Accurate recognition of radar modulation mode helps to better estimate radar echo parameters, thereby occupying an advantageous position in the radar electronic warfare (EW). The pure radar signal representation (PSR) is disentangled from the noise signal representation (NSR) through a feature disentangler and used to learn a radar signal modulation recognizer under low-SNR environments. Signal noise mutual information loss is proposed to enlarge the gap between the PSR and the NSR.
- radar signal
- modulation recognition
- denoising
- signal-to-noise ratio
1. Introduction
2. Conventional IPMR under Low SNR
Radar intrapulse modulated signals are difficult to detect and identify due to their extremely low peak power, high duty cycle, and other broad spectrum. Many studies on intrapulse feature extraction use signal statistics, such as cumulants (HOC), spectrum, and time–frequency features, as discriminant features to recognize the format of radar signals [15,16][15][16]. In [15,16[15][16][17],17], the composite cumulants such as phase jitter, phase offset, and frequency offset are used as extracted features to identify radar intrapulse modulations due to their robustness to noise and model mismatch. Ravi K. and Lunden J. used spectral analysis and instantaneous time-domain to classify digital modulation signals [4,18][4][18]. Traditional radar modulation recognition methods can correctly recognize the radar modulation formats in normal SNR environments. However, the difficulty of extracting the characteristic parameters within the radar signal pulse also increases as these characteristic parameters become more diverse and fragile. Traditional recognition methods may have problems of low identification accuracy and computational complexity under ultralow-SNR conditions.3. Deep-Learning-Based IPMR in Low-SNR Conditions
Unlike handcrafted feature extraction methods, deep-learning-based models have the capability to automatically capture discriminative feature representations to identify different radar modulation formats. Artificial neural networks were used as a new method of modulation recognition in [23][19] for the first time. Most deep learning-based IPMR approaches typically consist of two steps: denoising processing and modulation classification to improve system performance in low-SNR environments. The method proposed in [24][20] involves designing an eight-layer CNN classifier to identify time-frequency images (TFIs), which is preprocessed by a series of 2D Wiener filters, bilinear interpolation and the Otsu method to remove background noise. Qu [14] proposed the convolutional denoising autoencoder (CDAE) to effectively reduce the interference of low SNR on IPMR and improve the classification performance. In [10], a deep autoencoder network for modulation classification was proposed. The network is trained with a non-negative constraint algorithm for constraining negative weights and inferring more meaningful hidden structures. The above methods improve the recognition accuracy in low-SNR environments. However, disentangling the pure signal from the noise in deep feature space is a more straightforward solution when the background noise is extremely strong. The denoising and classification tasks can be synchronously completed in an end-to-end way through disentangled learning, and the two tasks can even supervise and promote each other.4. Disentangled Learning
As a method of feature decomposition, disentangled learning aims to correctly reveal a set of independent factors that produce the current observation [23][19], which has been demonstrated as effective in tasks of image translation and image classification [27][21]. Interestingly, in [28][22], Han et al. proposed a disentangled-learning-based network for exploring disentangled general representations in biosignal processing. A disentangled framework is proposed here for not only noise reduction, but also to use disentangled learning to disentangle a low-SNR radar representation into pure PSRs and NSRs. This method has great potential in bridging the gap between radar signal denoising and classification by using denoising-guided disentangled network (DGDNet). It enhances the useful signal by correctly uncovering two independent feature representations in the modulated radar signals.5. DGDNet
5.1. Structure of The Network
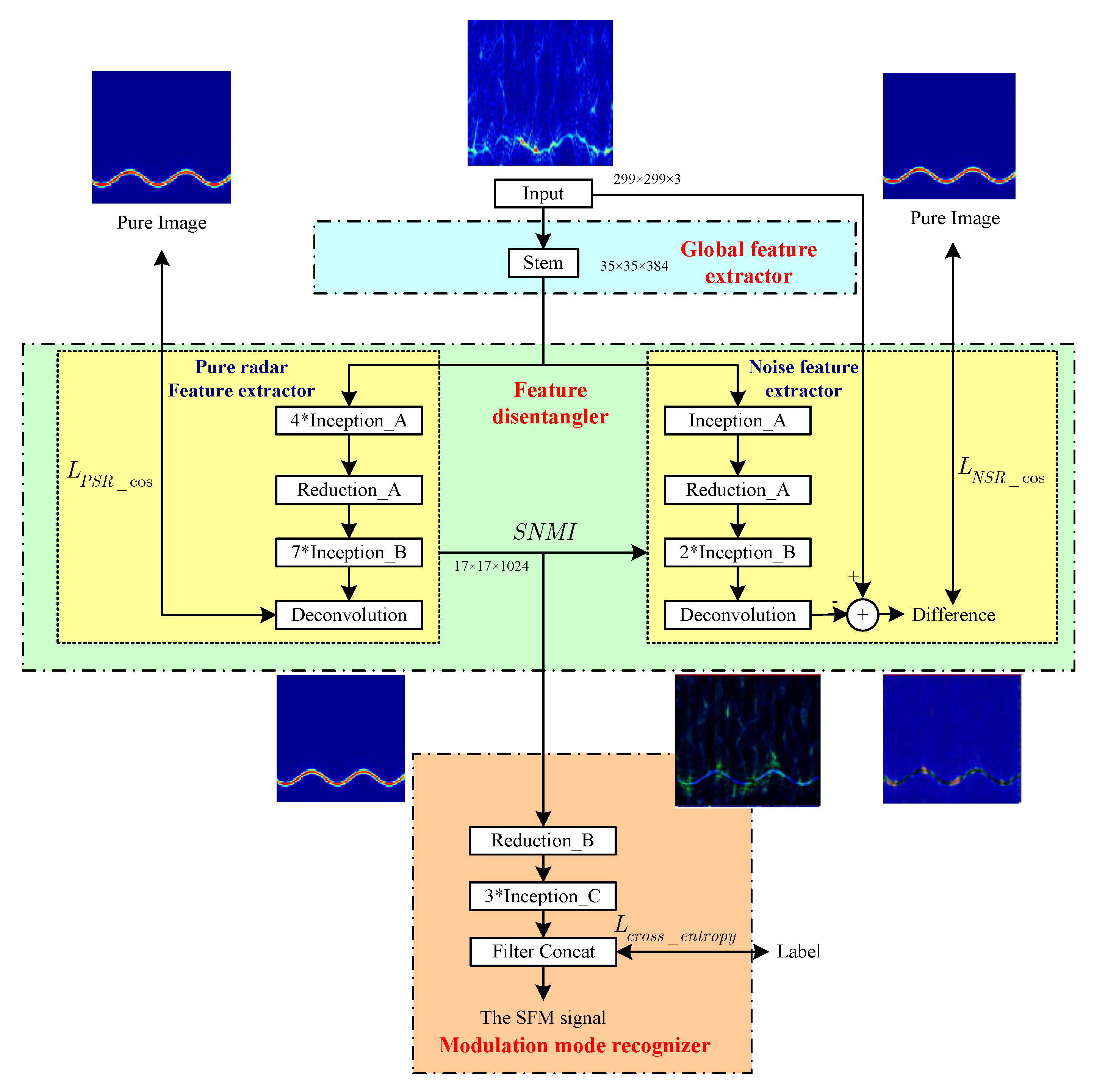
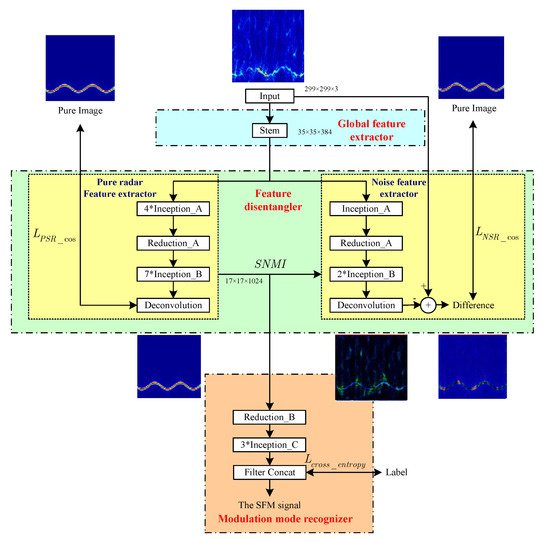
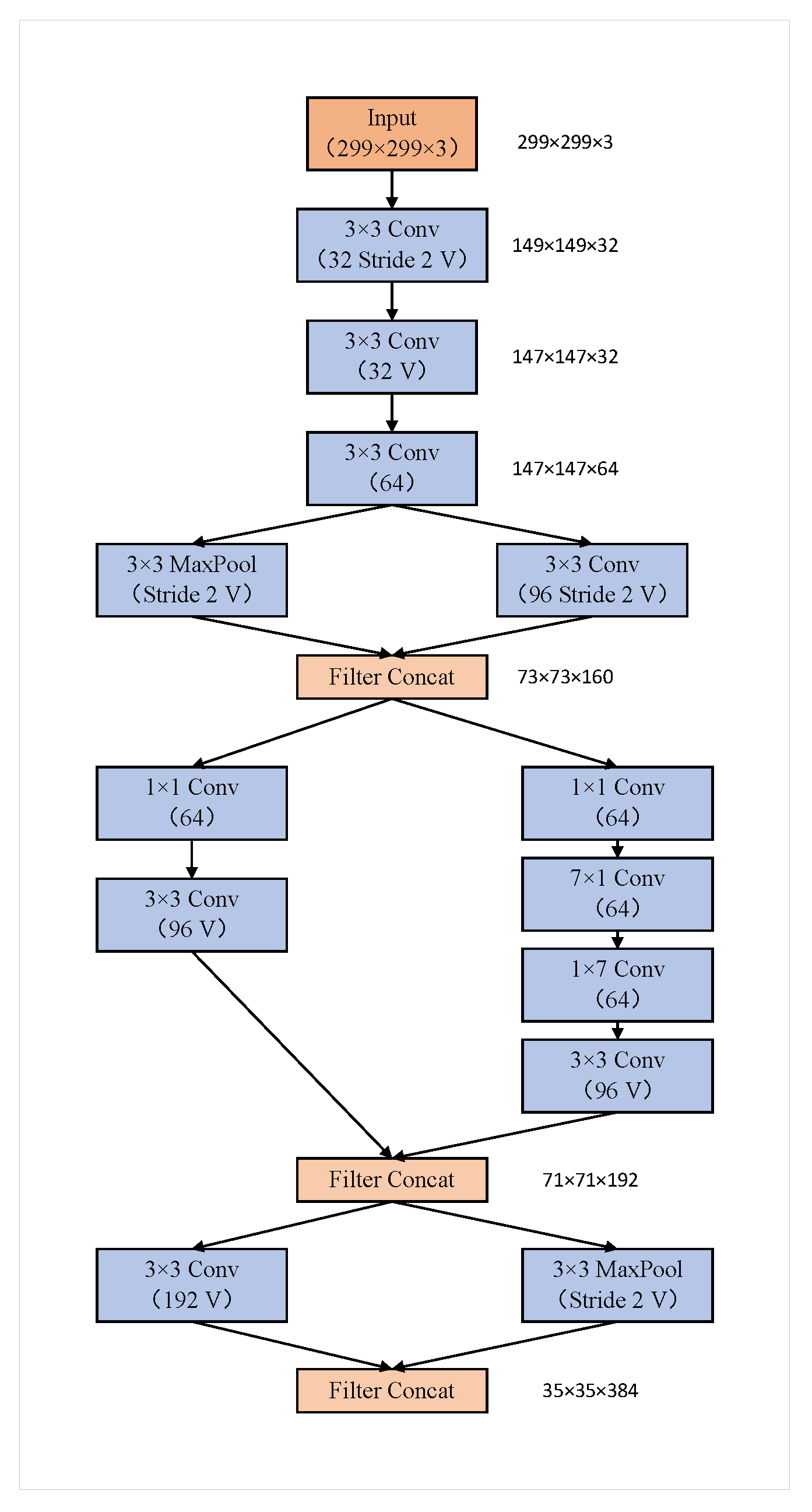
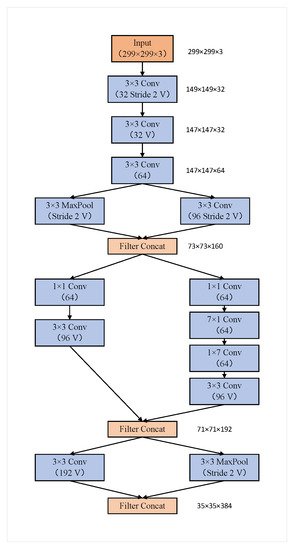
5.2. Global Feature Extractor
5.3. Feature Disentangler
The output of the global feature extractor is feature maps, including PSR and NSR, and the feature disentangler is devised to progressively disentangle the PSR from the NSR by using the pure radar feature extractor and noise feature extractor.-
Pure Radar Feature ExtractorThe pure radar feature extractor includes four Inception_A modules, one Reduction_A module, seven Inception_B modules, and one deconvolution module. The Inception module is used to extract the useful signal features hidden in the TFIs. The reduction layer is applied to reduce the image size. The output of the pure radar feature extractor is the PSR, which can be used to classify different modulation formats. The PSR can be used to reconstruct the denoised TFIs through the deconvolution module.
- Pure Radar Feature Extractor
- Noise Feature Extractor
- Noise Feature Extractor Similar to the pure radar feature extractor, the noise signal extractor is based on the Inception structure. It contains one Inception_A module, one Reduction_A module, two Inception_B, and one Deconvolution module. The output of the noise feature extractor is the NSR, which can be used to reconstruct the noise images through the deconvolution module. Similar to the pure radar feature extraction process, the TFIs transformed from the radar signal under SNR of 16 dB can be used as the ideal denoising images. Therefore, the ideal noising images can be calculated as the difference between the input noisy TFIs and the ideal denoising images.
Similar to the pure radar feature extractor, the noise signal extractor is based on the Inception structure. It contains one Inception_A module, one Reduction_A module, two Inception_B, and one Deconvolution module. The output of the noise feature extractor is the NSR, which can be used to reconstruct the noise images through the deconvolution module. Similar to the pure radar feature extraction process, the TFIs transformed from the radar signal under SNR of 16 dB can be used as the ideal denoising images. Therefore, the ideal noising images can be calculated as the difference between the input noisy TFIs and the ideal denoising images.
6. Conclusions
A novel network called DGDNet is proposed to recognize intrapulse modulation mode of radar signal. The noisy TFIs under low-SNR environments can be obtained through the class time-frequency distribution (CTFD). The DGDNet is used to simultaneously complete the denoising and recognition of noisy TFIs in an end-to-end method. Meanwhile, PSR and NSR can be automatically extracted from the feature disentangler to improve the radar signal modulation identification performance in a low-SNR environment.References
- Zuo, L.; Wang, J.; Sui, J.; Li, N. An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar. Remote Sens. 2021, 13, 4954.
- Xu, J.; Zhang, J.; Sun, W. Recognition of The Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sens. 2021, 13, 2375.
- Zhu, M.; Li, Y.; Pan, Z.; Yang, J. Automatic Modulation Recognition of Compound Signals Using a Deep Multilabel Classifier: A Case Study with Radar Jamming Signals. Signal Process. 2020, 169, 107393.
- Ravi Kishore, T.; Rao, K.D. Automatic Intrapulse Modulation Classification of Advanced LPI Radar Waveforms. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 901–914.
- Sadeghi, M.; Larsson, E.G. Adversarial Attacks on Deep Learning-based Radio Signal Classification. IEEE Wirel. Commun. Lett. 2019, 8, 213–216.
- Wang, Y.; Gui, G.; Ohtsuki, T.; Adachi, F. Multi-Task Learning for Generalized Automatic Modulation Classification under Non-Gaussian Noise with Varying SNR Conditions. IEEE Trans. Wirel. Commun. 2021, 20, 3587–3596.
- Yu, Z.; Tang, J.; Wang, Z. GCPS: A CNN Performance Evaluation Criterion for Radar Signal Intrapulse Modulation Recognition. IEEE Commun. Lett. 2021, 25, 2290–2294.
- Hassan, K.; Dayoub, I.; Hamouda, W.; Nzeza, C.N.; Berbineau, M. Blind Digital Modulation Identification for Spatially Correlated MIMO Systems. IEEE Trans. Wirel. Commun. 2012, 11, 683–693.
- Wang, Y.; Gui, J.; Yin, Y.; Wang, J.; Sun, J.; Gui, G.; Adachi, F. Automatic Modulation Classification for MIMO Systems via Deep Learning and Zero-Forcing Equalization. IEEE Trans. Veh. Technol. 2020, 69, 5688–5692.
- Ali, A.; Yangyu, F. Automatic Modulation Classification Using Deep Learning Based on Sparse Autoencoders with Nonnegativity Constraints. IEEE Signal Process. Lett. 2017, 24, 1626–1630.
- Peng, S.; Jiang, H.; Wang, H.; Alwageed, H.; Zhou, Y.; Sebdani, M.M.; Yao, Y.D. Modulation Classification Based on Signal Constellation Diagrams and Deep Learning. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 718–727.
- Tian, C.; Xu, Y.; Li, Z.; Zuo, W. Attention-guided CNN for Image Denoising. Neural Netw. 2020, 124, 117–129.
- Qu, Z.; Hou, C.; Wang, W. Radar Signal Intra-Pulse Modulation Recognition Based on Convolutional Neural Network and Deep Q-Learning Network. IEEE Access 2020, 8, 49125–49136.
- Qu, Z.; Wang, W.; Hou, C. Radar Signal Intra-Pulse Modulation Recognition Based on Convolutional Denoising Autoencoder and Deep Convolutional Neural Network. IEEE Access 2019, 7, 112339–112347.
- Azzouz, E.E.; Nandi, A.K. Automatic Identification of Digital Modulation Types. Signal Process. 1995, 47, 55–69.
- Zhang, L.; Yang, Z.; Lu, W. Digital Modulation Classification Based on Higher-order Moments and Characteristic Function. In Proceedings of the 2020 IEEE 5th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 23–25 October 2020.
- Zaerin, M.; Seyfe, B. Multiuser Modulation Classification Based on Cumulants in Additive White Gaussian Noise Channel. IET Signal Process. 2012, 6, 815–823.
- Lunden, J.; Terho, L.; Koivunen, V. Waveform Recognition in Pulse Compression Radar Systems. In Proceedings of the 2005 IEEE Workshop on Machine Learning for Signal Processing, Mystic, CT, USA, 28 September 2005.
- Wu, A.; Han, Y.; Zhu, L.; Yang, Y. Instance-Invariant Domain Adaptive Object Detection via Progressive Disentanglement. IEEE Trans. Pattern Anal. Mach. Intell. 2021; in press.
- Qu, Z.; Mao, X.; Deng, Z. Radar Signal Intrapulse Modulation Recognition Based on Convolutional Neural Network. IEEE Access 2018, 6, 43874–43884.
- Deng, W.; Zhao, L.; Liao, Q.; Guo, D.; Kuang, G.; Hu, D.; Liu, L. Informative Feature Disentanglement for Unsupervised Domain Adaptation. IEEE Trans. Multimed. 2021; in press.
- Han, M.; Özdenizci, O.; Wang, Y.; Koike-Akino, T.; Erdoğmuş, D. Disentangled Adversarial Autoencoder for Subject-Invariant Physiological Feature Extraction. IEEE Signal Process. Lett. 2020, 27, 1565–1569.