This papentryr reports a thorough overview on the last developments concerning the vital sign detection and the human localization employing the multiple-input-multiple-output (MIMO) technology. The wireless motion and vital sign detection represents an outstanding research area aimed at monitoring the health conditions of human subjects and at detecting their presence in different environments with minimal concern. MIMO radars exhibit several interesting advantages over conventional single-input-single-output architectures mainly related to their angle detection capabilities and enhanced signal-to-noise ratio. This paper describes the main features and details the operating principles of MIMO technology. Thereafter, it summarizes the state-of-the-art of the available solutions with the purpose of fueling the research activities on this hot topic.
- MIMO radar
- vital sign detection
- heartbeat
- breathing
- human localization
- angle of arrival
- AoA
- antenna array
- biomedical
- physiological
1. Introduction
In the past decades, wearable and contactless health monitoring sensors have attracted huge attention [1]. The formers are able to provide continuous monitoring capabilities in a large set of scenarios and show reliable performance in terms of vital sign detection and body parts motion estimation [2][3][2,3]. Nonetheless, current wearable health monitoring devices, e.g., respiratory belt, smart watches, pulse oximeters, may result in uncomfor experiences because of the intrinsic contact to the body. People could refuse to wear contact-based sensors, thus severely restricting their application field. Moreover, even though they allow to measure one or more physiological parameters, they are usually not able to simultaneously monitor more than one subject at a time.
Great efforts have been devoted to investigating the possibility of detecting physiological parameters without any contact. To this aim, the most employed detection methodologies exploit thermal imaging, optical systems and radar-based devices [4][5][4,5].
The thermal imaging extraction of vital signs is based on the detection of the infrared (IR) radiation emitted by a certain part of the human body. The analyzed part of the human body takes the physiological effect into account [6][7][6,7]. As an example, the heart activity is related to the temperature variation caused by the blood flow at certain superficial arteries, whereas the respiratory activity involves the temperature gradient caused by breathing out. However, they are largely affected by random body motion artifacts and furthermore the possible applications are limited by the high cost of the sensor.
Optical systems are based on cameras whose main tasks rely on the extraction of the cyclic chest motions due to cardiorespiratory activities or to the detection of skin color changes as a consequence of the physiological movements (photoplethysmography) [8][9][8,9]. However, they are very sensitive to different ambient light conditions and affected by privacy concerns that make these transducers unsuitable for a huge set of applications.
Radar-based systems exploit the Doppler effect, i.e., the signal reflected by a person is modulated by the chest motion as a consequence of the physiological activity or of the skin pulse due to arterial blood pressure. In this framework, the use of radar sensors for the non-contact detection of the Doppler effect has become a rapidly developing research field fueled by the great technological advancements, particularly concerning the microwave and millimeter-waves (mm-) front-ends [10][11][12][10,11,12]. Radar features outperform the other contactless methods, e.g., ultrasonic and infrared, in terms of reliability in presence of changing light conditions and temperature.
Medical radars typically exploit sensing techniques and technologies such as ultra-wideband (UWB), Doppler, continuous wave (CW), and frequency modulated continuous wave (FMCW) radars [13][14][15][16][17][18][19][20][13,14,15,16,17,18,19,20]. They can be considered as un-intrusive systems able to preserving the users’ privacy and comfort.
Whereas CW radars provide better resolution than FMCW radars in measuring speeds and displacements, FMCW radars are able to provide range detection capabilities [21][22][23][21,22,23]. UWB radars are characterized by low transmitted power and power consumption [24].
In recent years, multiple-input multiple-output (MIMO) radars are achieving a growing attention because of their capability to measure the angle-of-arrival (AoA) of the received echoes thus enabling the estimation of the targets’ precise location over both the azimuthal and the elevation planes. The peculiar hardware characteristic of the MIMO radar architectures is the presence of multiple transmitting and receiving antennas able of transmitting different, often orthogonal waveforms. Thereafter, by measuring the time shifts resulting from the different time-of-flight (TOF) covered by the echoes reflected by targets with different angular positions, it is possible to compute the AoAs and thus estimate the exact targets location [25].
The most relevant advantages of this technology can be summarized as:
-
Improved detection performances due to the signal-to-noise (SN) ratio of the received signals better than the single-input-single-output systems.
-
Angle estimation capabilities.
-
Lower minimum detectable speed.
The available research articles concerning MIMO radars for biomedical applications are divided into two main topics:
-
MIMO systems exploited for enhancing the accuracy and reliability of the vital sign detection.
-
MIMO systems employed for both the human vital sign detection and human precise location.
2. Biomedical Application of MIMO Radars
In [26][27][28][40,41,42] some examples where a MIMO radar is exploited for the human detection in cluttered environments are shown. In detail, in [28][42] a bistatic MIMO radar has been employed for estimating the target location. The conceptual scheme of the system presented in this work is shown in Figure 16.
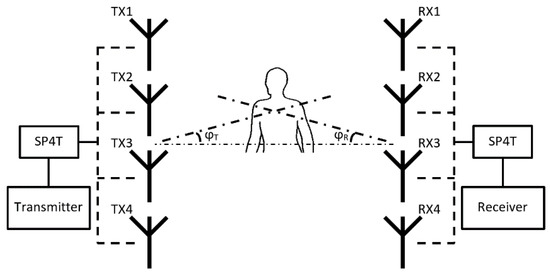
In the proposed configuration, operating at 2.4 GHz, the transmitter and the receiver have been set opposite each other, 4 m apart. The position of the person has been detected by intersecting the lines lying on the angles φT and φR, i.e., the AoA at the transmitting and receiving sections, respectively. Since the humans’ echoes fluctuate due to the physiological activity, the undesired echoes from stationary objects can be recognized and discarded. The effectiveness of the proposed solution has been confirmed in multipath environments with the subject-under-test in different positions.
In [29][43], a radar working within the Ka band exploits an antenna array composed by 256 equidistant virtual elements for both people localization and breathing detection. The measured data have been organized in beamformed images and thereafter transformed from the slow-time to the Doppler domain in order to isolate the static objects in the scene. Unlike [28][42], in [29] [43] stationary people have been considered static objects, thus ignoring the motion related to the physiological activity. Different scenarios including up to three people have been considered. Moreover, various windows have been applied on the measured data for improving the detection. Although limited to the detection of static objects, this radar showed valuable performance for the simultaneous monitoring of multiple targets in large areas.
In [30][44], a feasibility study concerning the extraction of the radar image of the human heart by using an UWB radar has been proposed. The UWB radar is composed by a vector network analyzer (VNA), a switching system, a beamformer and the antennas. In detail, a 56-elements non-uniform antenna array has been placed in contact with the thorax of a 35 years-old subject, while the breathing rate has been measured by means of an electrocardiogram (ECG). The VNA and the ECG measurements are synchronized by means of a trigger signal, whereas the operating frequency spans from 0.75 GHz to 12.27 GHz. The collected data are exploited for the task of image extraction by implementing a delay and sum (DAS)-based beamformer. A schematic diagram of the system has been reported in Figure 27.
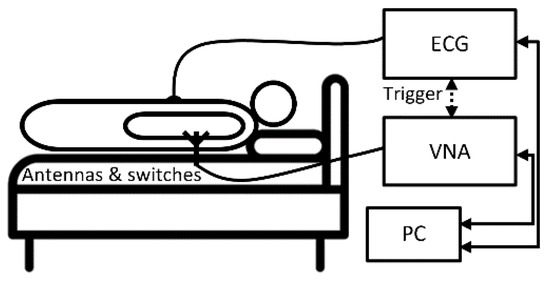
Figure 27. Schematic diagram of the ultra-wideband (UWB) radar proposed in [30].
Since a precise knowledge of the body inner structure was not available, a clear evidence of the presented results was not clearly stated throughout [30] [44]. However, the detected points were in agreement with the expected location of the heart sections and the measured breathing rate corresponded to the ECG measurement.
The work reported in [31][45], demonstrated the concurrent breathing and heartbeat measurement capabilities by using a MIMO radar that exploits a TDM technique. Four transmitting/receiving couples of antennas have been randomly distributed around a person standing 4 m away from the radar. A graphical representation of the scenario has been shown in Figure 38.
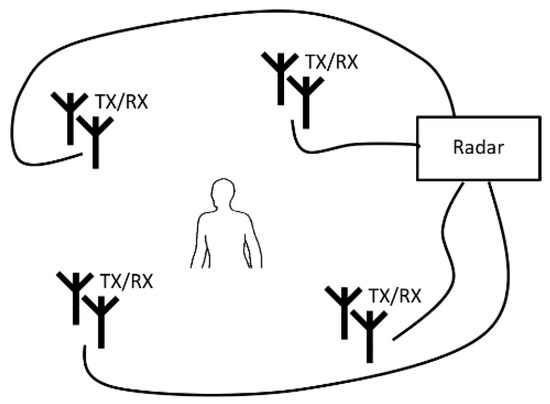
Figure 38. Graphical representation of the operating scenario described in [31].
The 16 collected acquisitions allowed both to increase the SN of the received signal and to enhance the reliability of the measurement. Indeed, the signal received by a single transmitting/receiving couple might be vanishing or weak due to different factors, e.g., multipath from cluttered environments and/or excessive angulations. The redundant detection from multiple angles allows to overcome these limitations, thus fulfilling the task of measuring both the breathing rate and the heartbeat.
In [32][46], both the angular position and the breathing of two people located at different lateral positions but at the same distance has been demonstrated. The proposed system employs an UWB radar and implements an adaptive beamforming technique, i.e., a modified Capon method with optimized weights at each receiving antenna. The optimization was implemented because the Capon method requires not correlated received signals, as it is not the case of the echoes reflected from breathing people. In detail, two diagonal loading factors have been tested for the AoA estimation, exhibiting a root-mean-square error of the measured breathing better than 0.13 mm, which is a remarkable result compared to the performance of the conventional algorithm that has been estimated equal to 2.7 mm.
Reference [33] [47] reports on a human localization algorithm implementing a 2-D MUSIC algorithm with spherical-mode applied on a time-differential channel. By means of a MIMO radar architecture, it has been demonstrated that the feasibility of both heartbeat and breathing detection in just few seconds, corresponding to one biological activity cycle. The experimental activity in indoor environment showed a localization error better than 0.5 m.
In [34][48], an FMCW MIMO radar has been employed for monitoring both the breathing and heart rates. The proposed system, after noise suppression and unwanted targets removal, improves the standard accuracy levels by exploiting multiple antenna pairs operating simultaneously.
In [35][49], the person 3D location is estimated by employing a time-differential channel technique whereas the Doppler radar cross section (RCS) is calculated from the reflected signal. The received data are elaborated by exploiting a three-dimensional MUSIC algorithm with a spherical mode vector, whereas the person posture is identified by implementing a nearest neighbor algorithm.
The results showed that all postures had root-square mean error values within 0.25 m.
A graphical representation of the measurement setup and the experimental environment is provided in Figure 49. The antenna arrays have been realized on a polytetrafluoroethylene (PTFE) substrate and are composed by 16 patches per channel, i.e., transmitting and receiving channels.
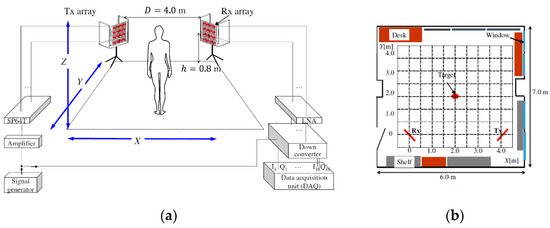
Figure 49.
a
b) experimental environment [35].
Not-human targets are discarded by observing the time-variant channel response of Figure 510, where humans show a time-varying behavior.
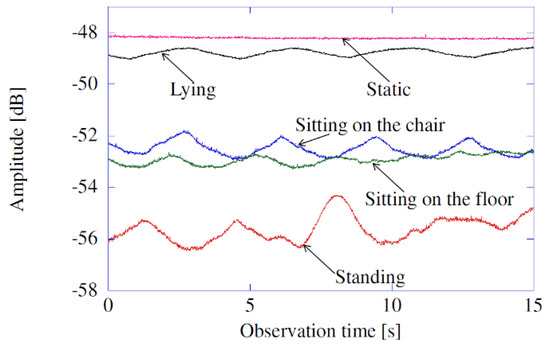
Figure 510. Response of time-variant channel [35].
As shown in Figure 611, where the measurements have been performed on a single person (a,b) standing, (c,d) sitting on a chair, and (e,f) lying on the floor, the different postures might be clearly recognized with good accuracy.
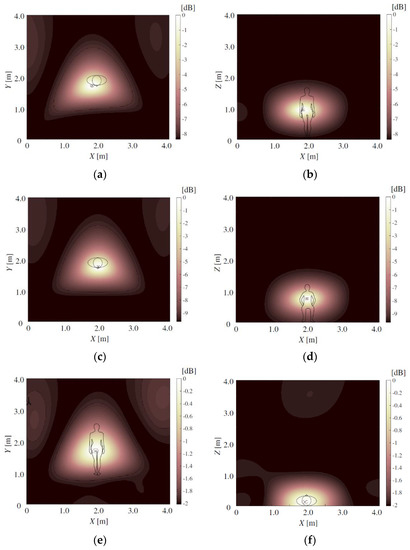
Figure 611.
a
b
c
d
e
f) lying on the floor [35].
Moreover, the training data achieved from the height and the Doppler radar cross section (RCS) and reported on the scatter diagram of Figure 712, demonstrated that the postures do not have overlapping distributions.
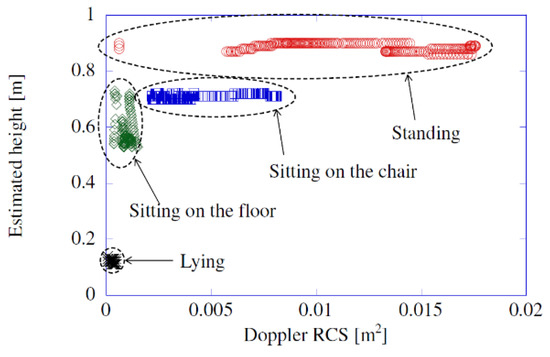
Figure 712. Training data based on height and Doppler radar cross section (RCS) [35].
A further example of radar application where multiple receiving antennas are employed for improving the detection capabilities in a redundant arrangement has been reported in [36][50]. In detail, a SIMO Doppler radar sensor has been developed in order to be sensitive only to moving objects. The additional receiving channel allowed to obtain the initial target location, whereas a subcarrier modulation has been implemented to solve the phase ambiguity issues. Finally, the exact position of only the moving object has been obtained.
In [37][51], the vital signs detection of multiple people employing a CW Doppler radar based on concurrent multibeam systems has been demonstrated. The multi-beam architecture allows to overcome the phase collision issues arising when multiple targets are present within the scene. Moreover, additional spatial filtering mitigates the inter-beam inferences.
In [38][52], the task of simultaneously detecting the people position and both the breathing and heart rates has been fulfilled by employing a very compact radar solution. A high integration level has been achieved by employing an operating frequency equal to 120 GHz. The antennas consist of two transmitters and eight receivers arranged in a circular distributed virtual array shape. Because of the circular distribution, a back-projection processing is required for the 3D image estimation.
In [39][53], the heartbeat rate of a person has been recorded during the sleeping time by using an UWB MIMO radar. In detail, the MIMO features have been exploited to improve the SN ratio by implementing a maximum ratio combining (MRC) technique. The MRC has been also used for avoiding the interferences due to the human unconscious movements during the sleep time.
A beamforming technique has been implemented at the radar receiver of the SIMO system presented in [40] [54] for enhancing the desired signals and attenuating the unwanted components from other directions.
In [41][55], a MIMO radar system has been simulated with the purpose of locating the position of the patient and measuring the breathing rate. A custom antenna array has been also designed and tested.
3. Conclusions
The main features of MIMO radars have been exposed for highlighting the main advantages over the traditional single-input-single-output architectures with the aim of fueling the research activity on this interesting and recent topic. After a description of the involved physiological mechanisms and a straightforward theoretical analysis of the MIMO processing techniques, the main findings concerning the MIMO radar technology for the vital sign detection and human localization have been reported. The aim of this work is to provide a landmark for the future research activities in the context of biomedical radars.