Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 3 by Conner Chen and Version 5 by Conner Chen.
Exoskeletons and exoskeletal robots are wearable devices based on a mechanical structure that conceptually mirrors the skeletal structure of a limb or of the involved body-part. Exoskeletons are robots that closely interact with humans and that are increasingly used for different purposes, such as rehabilitation, assistance in the activities of daily living (ADLs), performance augmentation or as haptic devices.
- actuators
- assistive devices
- exoskeletons
- rehabilitation
- sensors
1. Introduction
Exoskeletons and exoskeletal robots are wearable devices based on a mechanical structure that conceptually mirrors the skeletal structure of a limb or of the involved body-part. In recent decades and still today, they are the subject of much research, considering the advantages that they can bring to the end-user.
These devices can be classified according to various aspects. Classifications can be based, for instance, on the purpose, on the body part to which they are addressed, on the used actuation technology, or on the type of interaction with the user. Additionally, human–robot interaction through robotic exoskeletons can be aimed at different purposes, and four main classes can be identified: rehabilitation, assistance, performance augmentation and haptic interaction [1].
2. General architecture of a robotic exoskeleton
Robotic rehabilitation provides repetitive, flexible and customizable exercises that complement physiotherapist work, aimed at the functional recovery of patients who report impairments or disorders deriving, e.g., from stroke, brain or spinal cord injuries (SCI), amyotrophic lateral sclerosis (ALS), orthopaedic surgery, or cerebral palsy (CP) [2]. Further significant advantages are associated with the use of robotic devices in rehabilitation, including, e.g., intense repetitive training, performing at home rehabilitation with remote control, automatically adjusting the device support based on the patient progressive recovery [3][4], increasing the patient engagement through computerized activities proposed in the form of games, monitoring progress through the assessment of outcomes in an objective way [5] and reducing the overall cost of rehabilitative care given the aging of our society [6][7].
Assistive robotic exoskeletons can be effectively used to help the elderly or permanently injured in carrying out the most important activities of daily living (ADLs) with more independence, attempting to compensate for disabilities or partial functional loss [8]. Walking, grasping and handling objects and eating are some of these core activities.
In the context of work or military duties, which involve very intense stresses to the human skeletal and muscular structures, the use of an exoskeletal robot can lead to a significant improvement in the operating conditions and a reduction in the physical injuries risks associated with these types of tasks [9]. Specifically designed exoskeletons for performance augmentation combine the strength of a robot with the intelligence of a human to perform tasks that could hardly be done either by a man alone or robot alone. Furthermore, haptic interfaces intended for augmented or virtual reality applications [8] can be developed through wearable exoskeletons.
Considering the anatomical district to which the exoskeleton is aimed, the devices for the upper limb (upper limbs exoskeletons ULE) are identified, for the lower limb (lower limbs exoskeleton LLE), for the whole body or for a specific anatomical district. A dedicated class is often considered for the hand (hand exoskeletal devices HED), due to the fundamental role that it plays in the ADLs. Likewise, the trunk is often considered individually, given the particular characteristics (such as high amplitude) of the associated movements. For each one of these classes, the adopted design solutions are strongly influenced by the exoskeleton’s purpose.
Similarly to any other type of robot, a robotic exoskeleton is a complex system of interrelated parts. As the block-diagram of Figure 1 depicts, the following set of fundamental elements can be typically identified:
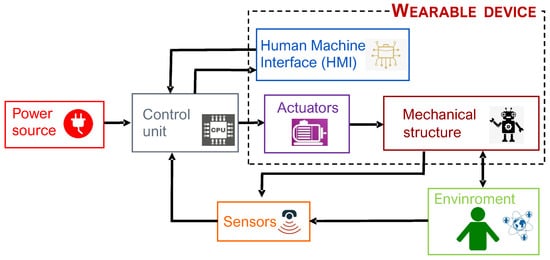
Figure 1. General architecture of a robotic exoskeleton. Actuators and sensors are fundamental elements within the overall system that constitutes the exoskeleton. Actuators are key elements in active devices, and the adopted technological choices significantly influence the device performance. Sensors are essential for the interaction with the environment, in particular with the user of the exoskeleton. The choices for actuator and sensor technologies are often correlated.
- a mechanical structure, with degrees of freedom (DoF) consistent with the robot’s purpose;
- actuators, which generate the required mechanical power;
- one or more sources of energy;
- proprioceptive and exteroceptive sensors, providing information on the machine functional status and on the interaction with the user and/or the environment;
- a control unit, processing the signals transmitted by the sensors and instructing the motor controllers;
- human/machine interface(s) receiving information/instructions from users (either the therapist or the user) and providing online feedback; and the environment.
The environment, purpose and working conditions strongly affect the requirements that a device is expected to fulfill [10]. For instance, traditional industrial robots that operate in a structured environment can rely on the design philosophy “stiffer is better”, as the main requirements are high precision and speed. Unlike these, a wearable exoskeleton operates in an unstructured environment and must guarantee as main features safety comfort for the user, easy control and low encumbrance [11]. These different design specifications significantly influence the choice of system components and related technologies [12][13][14][15][16].
In the mechanical design, a fundamental choice concerns the number of DoF of the system, that is the sum of all independent movements (i.e., translations/linear displacements and rotations) that can be performed in all the joints of the device [17]. The number of DoF is defined in order to determine the exact position and orientation of all segments of the device. As the number of degrees of freedom increases, the mechanical complexity grows as well, but the handling possibilities also increase. The DoF of the device may be active or passive, whether they are actuated or not. An exoskeleton may have all the DoF active, only some of them or none.
In the first two cases, it is defined an active device and as a passive device in the latter. Finally, there are two further definitions of devices: haptic and coaching devices. Haptic exoskeletons interact with the user through the sense of touch, and their main function is not to cause or to resist movement, but rather to provide the user with tactile sensation.
Coaching devices are non-actuated devices that do not generate any forces but provide different feedback; they can serve as an input interface for interaction with games in virtual reality, such as systems using video-based motion recognition (e.g., Kinect®, Microsoft, Redmond, WA, USA).
The energy is provided by the power source. The control unit, based on the indications coming from the human–machine interface (HMI) and on the data acquired by the sensors, decides how the actuators must be powered [3]. This control unit block therefore contains, in addition to a microprocessor that manages the command logo, electrical components that actually provide power to the actuators. The control unit must detect the user intention, provide safe movements and should be structured to favor the portability of the device. Actuators provide motion and forces or torques to the mechanical system.
The set of mechanical system and actuators constitutes the wearable device. Sometimes the HMI devices are an integral part of this device, and sometimes they are external, as well as for the sensors and the control unit. This depends on the structure of each device. The device interacts with the environment, which defines the limits to the movement and imposes boundary conditions for the functioning, such as the rehabilitation strategy, the operating modes and the methods for evaluating the results.
The actuation units can be placed either distally or proximally with respect to the ground of the kinematic frame, and the position of the motors affects the dynamics of the system. The strategy of placing the actuators directly at the joint level avoids the need of a transmission mechanism but increases the inertia of the moving parts, resulting in a less transparent control and in a more power-consuming system. With the choice of proximally placed actuators, a transmission mechanism is required to transmit the torque at the distal location. This reduces the inertia at the joint but also introduces the challenge of compensating for the nonlinear dynamics that may arise in the transmission, such as hysteresis and friction.
Another design choice that significantly influences many fundamental aspects, such as the structure, weight, energy consumption and performance, concerns the technology for the generation of mechanical power. A wide variety of actuation technologies have been used to develop exoskeletal robotic devices. These can be classified according to the nature of the energy source used to generate mechanical power: hydraulic, pneumatic and electric actuation are the most common.
Similarly, different technologies are used for sensing purposes in exoskeletons, such as measures relating to the movement of specific limbs [18], forces or torques exchanged between device and user, bio-signals, such as electromyography signals (EMGs) [19], electroencephalography signals (EEGs) and mechanomyography signals (MMG) to be used for device control or validation [20][21][22], etc.
3. The main reviewed publications on the exoskeleton theme
The mechanical structure (and consequently DoF and concerned body-part), actuation, sensors, HMI, control strategy and purpose are the main aspects on which the research activity on exoskeletons may be focused. Several articles on exoskeletons have been published in recent years, and those taken into consideration are collected in Table 1. Most of them concern devices dedicated to a specific body part, i.e., the upper or lower limbs, and, among the more recent publications, only Agarwal et al. [1], published in 2019, addresses exoskeletons in a more general way.
Table 1. The main reviewed publications on the exoskeleton theme.
| Ref. | First Author | Year | Purpose | Anatomical District | Main Topics |
|---|---|---|---|---|---|
| [23] | Hussain F. | 2021 | Assistance | LLE | Materials, actuation, and manufacturing methods |
| [17] | Sanjuan J.D. | 2020 | Rehabilitation | ULE | Design review of cable driven exoskeletons |
| [1] | Agarwal P. | 2019 | Rehabilitation, assistance, performance augmentation | All | Design, Actuation, Sensing, Materials, Control, Case studies |
| [24] | Shi D. | 2019 | Rehabilitation | LLE | Human gait analysis, Design, Actuation, Control |
| [25] | Sanchez-Villamañan M. | 2019 | Rehabilitation and assistance | LLE | Mechanical design principles in compliant LLE |
| [9] | Al-Shuka H.F.N. | 2019 | Power augmentation exoskeletons | LLE | Biomechanics, actuation, control |
| [26] | Rehmat N. | 2018 | Rehabilitation | ULE | Mechanical design, control, clinic trials |
| [27] | Manna S.K. | 2018 | Rehabilitation | ULE | Actuation systems |
| [28] | Zhang X. | 2017 | Rehabilitation | LLE | Overview of recent representative robots,actuation, control |
| [29] | Louie D.R. | 2016 | Rehabilitation | LLE | Clinical trials of robotic exoskeletons for gait rehabilitation in adults post-stroke |
| [30] | Chang S.R. | 2015 | Rehabilitation | LLE | Overview of commercial devices |
| [31] | Blank A.A. | 2014 | Rehabilitation | ULE | Patient Engagement in Therapy |
| [32] | Maciejasz P. | 2014 | Rehabilitation | ULE | Overview devices, type of assistance, mechanical design, actuation control, clinical studies |
| [33] | Heo P. | 2012 | Rehabilitation and assistance | Hand | Biomechanics, overview devices, actuation, intention sensing methods |
The authors, in the first part of their work, analyze the state of the art of exoskeletons used for medical applications and for performance augmentation; in the second part, they examine the sub-components, that is the mechanical design, actuation, sensing, materials and control; in the third part, they describe two case studies, Harmony (for shoulder and upper limb rehabilitation) and Maestro (for hand rehabilitation) and finally discuss ongoing challenges and future directions. Sanjiuan et al., in 2020 [17], of Rehmat et al., in 2018 [26], of Blank et al. [31], of Manna et al. [27] and of Maciejasz et al. [32] dated 2014, concern upper limb rehabilitation.
Sanjiuan et al. focused their work on construction solutions based on cable transmission. Rehmat et al. conducted a systematic review on the use of robotic exoskeleton systems for upper limb rehabilitation deepening typical mechanical structures and control strategies for exoskeletons in clinical rehabilitation conditions. The work of Blank et al. deals with robotic stroke rehabilitation for upper-limb therapy focusing on patients engagement. Manna et al. focused their review on a comparative study of actuation systems. Maciejasz et al. developed an extensive and thorough survey on devices for upper limb rehabilitation, including the analysis of over 120 devices. A greater number of reviews in recent years concern exoskeletons for the lower limbs.
Hussain et al. [23] in 2021 proposed a review of materials, actuation and manufacturing methods in exoskeleton robots for lower limb assistance. Shi et al. [24] examined the topics of gait analysis and mechanical design, actuation and control of lower limb exoskeletons. Sanchez-Villamañan et al. [25] reviewed the mechanical design principles of compliant lower limb exoskeletons. Al-Shuka et al. [9] covered biomechanical modeling, actuation and multi-level control strategies of power augmentation lower limb exoskeletons.
Zhang et al. [28] systematically reviewed the developments of robotic lower-limb rehabilitation after stroke, providing a classification, a comparison and a design overview of the driving modes, training paradigm, control strategy and gait perception. Louie et al. [29] proposed a scoping review with the aim of mapping the use of robotic exoskeletons for gait rehabilitation in adults. Chang et al. [30] reviewed the lower-limb exoskeletons to restore gait for individuals with paraplegia. Only one recent review devoted to current hand rehabilitation technologies was found [33], dated 2012.
Compared to Agarwal’s work, the proposaled review conducts a more extensive investigation of the scientific literature classifying the documents at different levels to extrapolate significant indications on the trends of research activity in this area. Furthermore, the analysis of actuation and sensing techniques is developed with a greater level of detail, as the review particularly focuses on these two aspects. The current work presents an approach similar to the one proposed by Maciejasz et al., in their review of 2014 [32].
The final aim is to trace a picture of the main solutions of exoskeletons, as complete as possible, for all the different uses and for all the different parts of the body. In detail, the proposed literature review presents two different analysis levels: a prospective review, or an observational study of the publication distribution over time, by purpose, by involved body district, by device type, focus and design solutions; and an analytical review, consisting of an in-depth study of the more recent and most used technologies for exoskeleton actuation and sensors.
Furthermore, cross-analyses were carried out to highlight possible correlations between the investigated issues. The identification of these correlations can provide useful information on the technological choices made for the different types and uses of exoskeletons, as well as on the results obtained with these choices. Figure 2 schematically shows the two main levels of analysis (prospective and analytical) and the cross analyses.
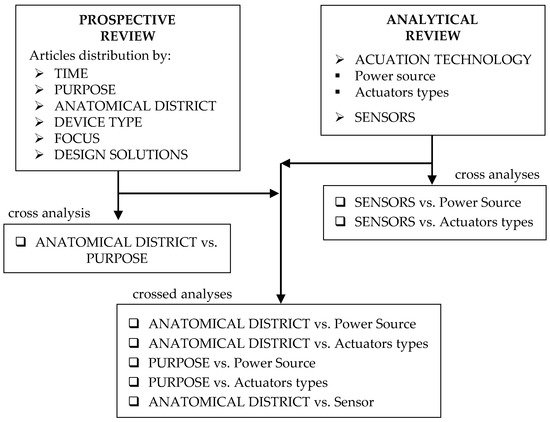
Figure 2. Prospective and analytical structures and performed cross analyses details.
Schematic summary of the review work: prospective and analytical review structures and performed cross analyses details.
An investigation on technical solutions for exoskeleton design choices with a particular focus on sensors and actuation technologies can be a useful contribution to future projects, highlighting what has already been considered and allowing useful insights from the successes but also from the shortcomings of other works. The aim is, therefore, to summarize the most recent and widespread solutions for exoskeleton development, which may be a valuable source of information for engineers, physiotherapists and exoskeleton developers in their activity.
References
- Agarwal, P.; Deshpande, A.D. Exoskeletons: State-of-the-Art, Design Challenges, and Future; Oxford Scholarship Online: Oxford, UK, 2019; pp. 234–259.
- Amici, C.; Ghidoni, M.; Ceresoli, F.; Gaffurini, P.; Bissolotti, L.; Mor, M.; Fausti, D.; Antonini, M.; Ragni, F.; Tiboni, M. Preliminary Validation of a Device for the Upper and Lower Limb Robotic Rehabilitation. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–6.
- Tiboni, M.; Legnani, G.; Lancini, M.; Serpelloni, M.; Gobbo, M.; Fausti, D. ERRSE: Elbow robotic rehabilitation system with an EMG-based force control. Mech. Mach. Sci. 2018, 49, 892–900.
- Proietti, T.; Morel, G.; Roby-Brami, A.; Jarrassé, N. Comparison of different error signals driving the adaptation in assist-as-needed controllers for neurorehabilitation with an upper-limb robotic exoskeleton. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6645–6650.
- Tiboni, M.; Borboni, A.; Faglia, R.; Pellegrini, N. Robotics rehabilitation of the elbow based on surface electromyography signals. Adv. Mech. Eng. 2018, 10, 1687814018754590.
- Formicola, R.; Ragni, F.; Mor, M.; Bissolotti, L.; Amici, C. Design Approach of Medical Devices for Regulation Compatibility: A Robotic Rehabilitation Case Study. In 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health; SCITEPRESS—Science and Technology Publications: London, UK, 2021; pp. 146–153.
- Formicola, R.; Ragni, F.; Borboni, A.; Amici, C. Design Process of Medical Devices for Robotic Rehabilitation: An Open Innovation-Inspired Approach. In Robotics, Machinery and Engineering Technology for Precision Agriculture; Shamtsyan, M., Pasetti, M., Beskopylny, A., Eds.; Springer: Singapore, 2022; pp. 575–584.
- Mohebbi, A. Human-Robot Interaction in Rehabilitation and Assistance: A Review. Curr. Robot. Rep. 2020, 1, 131–144.
- Al-Shuka, H.F.N.; Rahman, M.H.; Leonhardt, S.; Ciobanu, I.; Berteanu, M. Biomechanics, actuation, and multi-level control strategies of power-augmentation lower extremity exoskeletons: An overview. Int. J. Dyn. Control 2019, 7, 1462–1488.
- Amici, C.; Pellegrini, N.; Tiboni, M. The Robot Selection Problem for Mini-Parallel Kinematic Machines: A Task-Driven Approach to the Selection Attributes Identification. Micromachines 2020, 11, 711.
- Aggogeri, F.; Pellegrini, N.; Taesi, C.; Tiboni, M. Design for Reliability of Robotic Systems Based on the Prognostic Approach. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–5.
- Borboni, A.; Mor, M.; Faglia, R. Gloreha-Hand Robotic Rehabilitation: Design, Mechanical Model, and Experiments. J. Dyn. Syst. Meas. Control 2016, 138, 111003.
- Mikołajczyk, T.; Kłodowski, A.; Mikołajewska, E.; Walkowiak, P.; Berjano, P.; Villafañe, J.; Aggogeri, F.; Borboni, A.; Fausti, D.; Petrogalli, G. Design and control of system for elbow rehabilitation: Preliminary findings. Adv. Clin. Exp. Med. 2018, 27, 1661–1669.
- Aggogeri, F.; Mikolajczyk, T.; O’Kane, J. Robotics for rehabilitation of hand movement in stroke survivors. Adv. Mech. Eng. 2019, 11, 1687814019841921.
- Aggogeri, F.; Pellegrini, N.; Adamini, R. Functional design in rehabilitation: Modular mechanisms for ankle complex. Appl. Bionics Biomech. 2016, 2016, 9797801.
- Roveda, L.; Savani, L.; Arlati, S.; Dinon, T.; Legnani, G.; Molinari Tosatti, L. Design methodology of an active back-support exoskeleton with adaptable backbone-based kinematics. Int. J. Ind. Ergon. 2020, 79, 102991.
- Sanjuan, J.D.; Castillo, A.D.; Padilla, M.A.; Quintero, M.C.; Gutierrez, E.E.; Sampayo, I.P.; Hernandez, J.R.; Rahman, M.H. Cable driven exoskeleton for upper-limb rehabilitation: A design review. Robot. Auton. Syst. 2020, 126, 103445.
- Tiboni, M.; Filippini, A.; Amici, C.; Vetturi, D. Test-Bench for the Characterization of Flexion Sensors Used in Biomechanics. Electronics 2021, 10, 2994.
- Serpelloni, M.; Tiboni, M.; Lancini, M.; Pasinetti, S.; Vertuan, A.; Gobbo, M. Preliminary study of a robotic rehabilitation system driven by EMG for hand mirroring. In Proceedings of the 2016 IEEE International Symposium on Medical Measurements and Applications, Benevento, Italy, 15–18 May 2016.
- Amici, C.; Ragni, F.; Ghidoni, M.; Fausti, D.; Bissolotti, L.; Tiboni, M. Multi-Sensor Validation Approach of an End-Effector-Based Robot for the Rehabilitation of the Upper and Lower Limb. Electronics 2020, 9, 1751.
- Mauri, A.; Lettori, J.; Fusi, G.; Fausti, D.; Mor, M.; Braghin, F.; Legnani, G.; Roveda, L. Mechanical and control design of an industrial exoskeleton for advanced human empowering in heavy parts manipulation tasks. Robotics 2019, 8, 65.
- Guanziroli, E.; Cazzaniga, M.; Colombo, L.; Basilico, S.; Legnani, G.; Molteni, F. Assistive powered exoskeleton for complete spinal cord injury: Correlations between walking ability and exoskeleton control. Eur. J. Phys. Rehabil. Med. 2019, 55, 209–216.
- Hussain, F.; Goecke, R.; Mohammadian, M. Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proc. Inst. Mech. Eng. Part J. Eng. Med. 2021, 235, 1375–1385.
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. (English Edition) 2019, 32, 74.
- Sanchez-Villamañan, M.d.C.; Gonzalez-Vargas, J.; Torricelli, D.; Moreno, J.C.; Pons, J.L. Compliant lower limb exoskeletons: A comprehensive review on mechanical design principles. J. Neuroeng. Rehabil. 2019, 16, 55.
- Rehmat, N.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.Q.; Liang, H. Upper limb rehabilitation using robotic exoskeleton systems: A systematic review. Int. J. Intell. Robot. Appl. 2018, 2, 283–295.
- Manna, S.K.; Dubey, V.N. Comparative study of actuation systems for portable upper limb exoskeletons. Med Eng. Phys. 2018, 60, 1–13.
- Zhang, X.; Yue, Z.; Wang, J. Robotics in Lower-Limb Rehabilitation after Stroke. Behav. Neurol. 2017, 2017, 3731802.
- Louie, D.R.; Eng, J.J. Powered robotic exoskeletons in post-stroke rehabilitation of gait: A scoping review. J. Neuroeng. Rehabil. 2016, 13, 53.
- Chang, S.R.; Kobetic, R.; Audu, M.L.; Quinn, R.D.; Triolo, R.J. Powered Lower-Limb Exoskeletons to Restore Gait for Individuals with Paraplegia—A Review. Case Orthop. J. 2015, 12, 75–80.
- Blank, A.A.; French, J.A.; Pehlivan, A.U.; O’Malley, M.K. Current Trends in Robot-Assisted Upper-Limb Stroke Rehabilitation: Promoting Patient Engagement in Therapy. Curr. Phys. Med. Rehabil. Rep. 2014, 2, 184–195.
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3.
- Heo, P.; Gu, G.M.; Lee, S.j.; Rhee, K.; Kim, J. Current hand exoskeleton technologies for rehabilitation and assistive engineering. Int. J. Precis. Eng. Manuf. 2012, 13, 807–824.
More