The coverage path planning (CPP) algorithms aim to cover the total area of interest with minimum overlapping. The goal of the CPP algorithms is to minimize the total covering path and execution time. Significant research has been done in robotics, particularly for multi-unmanned unmanned aerial vehicles (UAVs) cooperation and energy efficiency in CPP problems. This paper presents a review of the early-stage CPP methods in the robotics field. Furthermore, we discuss multi-UAV CPP strategies and focus on energy-saving CPP algorithms. Likewise, we aim to present a comparison between energy-efficient CPP algorithms and directions for future research.
1. Introduction
In recent years, due to rapid technological development, UAVs and sensors they can carry have been developed to the extent that they can cover a wide range of applications
[1] that cannot be satisfied by other types of robots
[2]. Some of the applications are precision agriculture
[3[3][4],
4], search and rescue
[5], firefighting
[6], law enforcement
[7], powerline inspection
[8], oil and gas
[9], disaster management
[10], and cell network expansion
[11]. However, a fundamental problem is the optimal use of autonomous aircraft in terms of time and space
[2].
Recently, CPP algorithms have been developed, considering the parameters required for more efficient data retrieval from remote sensing sensors
[12,13][12][13]. In addition, algorithms have been developed that use multi-UAV to cover the area, thus reducing the coverage time of the area of interest
[14,15][14][15]. The way to cover an area with autonomous robots differs depending on the algorithm
[2,16,17][2][16][17]. In the literature, CPP algorithms use different methods (e.g., grids, graphs, and neural networks) with calculations performed online or offline for known or unknown areas
[18].
The CPP algorithms can be classified into two main categories: offline and online
[19]. Offline algorithms need to know the environment and the information included, such as obstacles and the geometry of the area of interest. Of course, in a real-life environment, many dynamic parameters cannot be known in advance. Offline algorithms have prior knowledge of the coverage area environment
[20]. They also provide more efficient and convenient route plans and use less central processing unit (CPU) power than online algorithms
[21].
The online algorithms are based on real-time environment data retrieved from onboard sensors to cover the area of interest. Online algorithms do not fully understand the coverage area environment, and the coverage path is executed in real-time by the UAV after processing the data using the sensors it carries. The benefits of online algorithms are the design of the in-flight route to complete the mission regardless of unforeseen situations and the unnecessary prior detailed knowledge of the coverage area
[20,22][20][22].
Furthermore, there are two categories of problems in area coverage: single coverage and repeat coverage. The goal of single coverage is to cover the entire area of interest and, at the same time, minimize the time and distance traveled by the coverage route
[23]. On the other hand, repetitive coverage aims to repeatedly cover all points of interest in the area, maximize the frequency of visits to points of interest, and minimize time and total coverage
[24].
2. Methods
For t
2. No Decomposition
The
pre
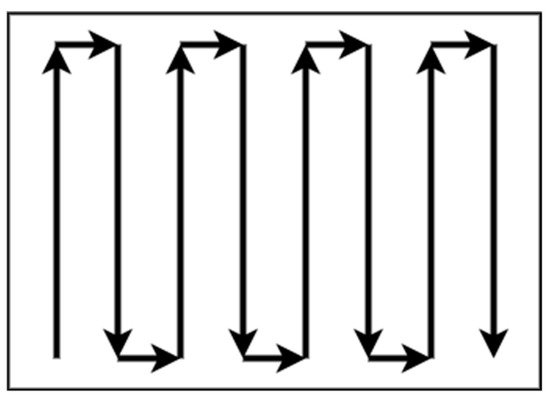
sent work, a systematic review research methodology was adopted. In that context, a range of platforms was sourced for information. Most of the sources cited in this survey were found in (a) the IEEE Xplore digital library, (b) the Google scholar platform, (c) the online Elsevier platform, and is no need for decomposition in areas with regular shapes and without complexity, such as rectangular areas. Patterns with simple path planning, such as boustrophedon or square, are adequate for total coverage of a non-complex area without overlapping. The boustrophedon method, which means “the way of the ox,” is a pattern of simple back and forth motion along the longest side of the polygon, as shown in d)Figure 1 t[25][26][27].
Figure 1. Boustrophedon pattern.
The
onli
ne MDPI platform.
Kterature assume
ywords
utilized were: “Coverage Path Planning”, “Decomposition methods”, “CPPthat the actual path is closely true to the plan when this method
s”, “Multi-robot CPP methods”, “Cell decomposition”, “Unmanned Aerial Vehicles”, “Energy optimal path”, “Energy-aware approaches”, “Multi-robot systems”, “Robot coverage”, “Robot kine is executed from a ground vehicle. On the other hand, UAVs are aerodynamically directly affected by the direction and intensity of the wind, which means that the actual trajectory of the flight in most cases is not close to that planned.
The square m
aet
ics”hod is represented by Andersen [28], and
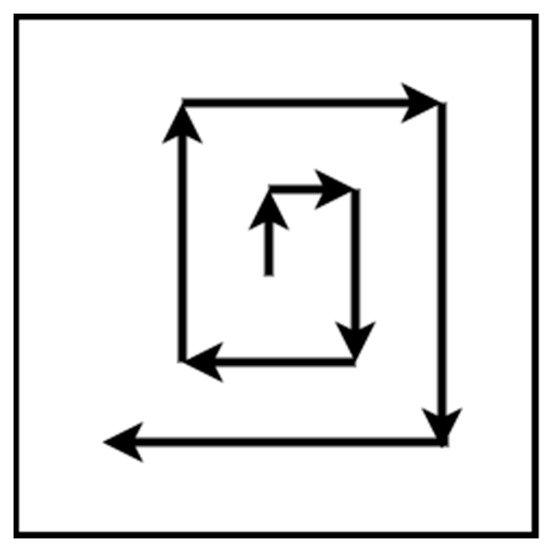
“UAVit is a Remote Sensing”. Initially, the resulting papers (approximately 170) were filtered by choosingpattern for a search and rescue mission. The flight path is straight lines with right 90 degrees turns. The pattern starts from the center of the area of interest and expands until the borders, as shown in tFigure 2.
Figure 2. Square pattern.
3. Exact Cellular Decomposition
The
cellular deco
nes referring to CPP algorithms,mposition methods are based on dividing an irregular space into cells. One class of these methods is the exact one. The exact cellular decomposition metho
ds, multi-robotd decomposes the irregular space into cells, and
multi-UAV coverage path strategies, and energy-awareness CPP algorithmstheir connections produce an accurate free space composition. Accurate methods are complete because they guarantee the finding of an accessible path, if any [29].
The
170 sub-a
forementioned publications reviewed forreas that arise from the decompositio
n methods,n can be covered from a single
UAV or multi
-robot CPP strategies, multi-UAV CPP methods, and UAV energy-saving algorithms. From the 170 papers, 128 were classified according to thple UAVs. There are patterns for a single UAV, such as boustrophedon and spiral for polygon and concave areas. Nevertheless, there are strategies for the cooperation of multiple UAVs in order to minimize the coverage time
[30].
4. Trapezoidal Decomposition
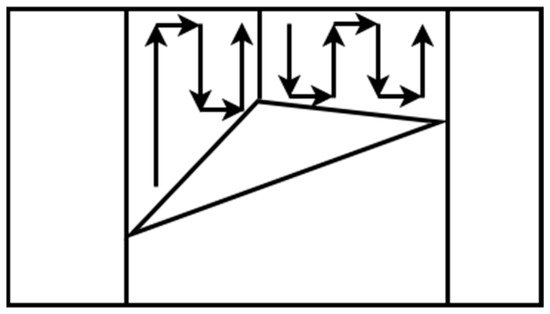
One exact cellular decomposition technique for irregular spaces that can give a complete coverage path is trapezoidal decomposition. This method is classified in the offline category of algorithms because it does not use remote-sensing information [31][32]. Each cell is a trapezoid in this method, and simple methods such as back and forth can be used to cover every cell. The coverage can be achieved by an exhaustive walk that generates a path to cover each cell to execute the path using back and forth motions such as boustrophedon, as shown in Figure 3. Often, this method is used for agriculture applications where the fields are polygonal and clear from obstacles. Oksanen and Visala [33] introduced an algorithm for CPP in agricultural fields and used the path cost function to optimize the final path.
Figure 3. Trapezoidal decomposition.
5. Boustrophedon Decomposition
Tr
ape
levance of the survey’s scope and their overlapping information. In the end, 128 papers were analyzed for their approaches and their correlation to categorize in sub-sectionzoidal decomposition produces many cells, some of which can be merged. This characteristic is a disadvantage because as many cells exist, the coverage path will be longer. To overcome this limitation, a method that creates nonconvex cells is needed. The boustrophedon cellular decomposition is similar to trapezoidal decomposition but considers vertices in the area called critical points
[25][27]. The bo
fustrophedon decomposition
methods, CPP methods, and energy-saving algorithm, of reduces the number of cells compared with trapezoidal decomposition, which
88 made it into means shorter path planning, as shown in Figure 4. As the
tr
efined versionapezoidal decomposition, this method is for polygonal areas, and the environment of the
present surveycoverage area should be known.
3. Results
C For th
ois
et [19] reason, it can be classified
theas CPP algorithms accordian offline method.
Figure 4. Boustrophedon decomposition.
6. Morse-Based Decomposition
An
g to
the ther cellular decomposition
usedmethod proposed by Acar et al.
[34] is based on Mo
rs
te functions CPP[35]. The algMor
ithmsse-based decompos
e the area of interest in cells. This method is preferable forition method has the advantage of different cells shapes such as circular and can be applied in any dimensional space, such as concave, polygon, and irregular
areas. On the other hand, whenspace. The cell decomposition is succeeded with a slice that sweeps through the area of interest
is a regular shape, it does not require any decomposition for single coverage of UAV. Table 1 a. A slice is discontinued at the critical point of the Morse function, which is restricted from t
he the end ofobstacle boundaries, as shown in Figure 5. tThis
section summarizes the decomposition method uses information concerning the area during motion planning. For this reason, the method
s and can be classified as online [36][37].
Figure 5. Morse-based decomposition.
7. Online Topological Coverage Algorithm
Wong [38] present
ed an algorithm that finds the
CPP approach, thcell boundaries online using slice decomposition. Slice decomposition
is a method
, the algorithm processing, the shape of for determining the cell boundaries using a sweeping line over the area of interest
, and the corresponding reference.
3.1. No Decomposition
There is no need for decomposition in areas with regular shapes and without complexity, such as rectangular areas. Patterns with simple path planning, such as boustrophedon or square, are adequate for total coverage of a non-complex area without overlapping. The boustrophedon method, which means “the way of the ox,” is a pattern of simple back and forth motion along the longest side of the polygon, as shown in
. As the line sweeps over the area, it separates the obstacles and free space in two regions or more, as shown in 6. The algorithm constructs a topological map using the slice decomposition on the area of interest [39].Figure 16. BoustrophSlicedon patter decomposition.
The literature assumes that the actual path is closely true to the plan when this method is executed from a ground vehicle. On the other hand, UAVs are aerodynamically directly affected by the direction and intensity of the wind, which means that the actual trajectory of the flight in most cases is not close to that planned.
The square method is represented by Andersen [36], and it is a pattern for a search and rescue mission. The flight path is straight lines with right 90 degrees turns. The pattern starts from the center of the area of interest and expands until the borders, as shown in Figure 2.
Figure 2. Square pattern.
3.2. Exact Cellular Decomposition
The cellular decomposition methods are based on dividing an irregular space into cells. One class of these methods is the exact one. The exact cellular decomposition method decomposes the irregular space into cells, and their connections produce an accurate free space composition. Accurate methods are complete because they guarantee the finding of an accessible path, if any [37]. The sub-areas that arise from the decomposition can be covered from a single UAV or multiple UAVs. There are patterns for a single UAV, such as boustrophedon and spiral for polygon and concave areas. Nevertheless, there are strategies for the cooperation of multiple UAVs in order to minimize the coverage time [38].
3.3. Trapezoidal Decomposition
O
8. Contact Sensor-Based Coverage of Rectilinear Environments
Butler et al. [40] present an
e exact cell
ular decomposition
technique for irregular spaces that can give a complete coveragealgorithm for contact sensor-based robots for online coverage of the rectilinear environment. In contact sensor-based coverage, the robot’s path is cycling with retracing, while at the same time it repeatedly constructs a cellular decomposition of the area of interest. When a robot’s full-cycle path is unsuccessful, it chooses a new path
is trapezoidabased on its position and environment. The robot’s motion depends on the area’s cell decomposition
. Th state, updated as the CPP progresses.
9. Grid-Based Methods
Gri
d-bas
ed method
iss are classified
in the offline category of algorithms bec as approximate cellular decomposition due to the restriction of the grid’s shape, which is uniform in space. It is impossible to represent precisely the shape of the target space and its obstacles [19]. The grid-ba
use
it does not use remote-sensingd methods decomposed the space into uniform grid cells, which can be squares or other shapes, as shown in Figure 7. Moravec ian
fd Elfes [41] propo
sed a gr
mation [39,40].id map presentation based on a Esona
ch cell is a trapezoid inr mounted on a mobile robot mapping an indoor environment.
Figure 7. Grid-based decomposition.
9.1. Wavefront Algorithm
The first
his CPP’s grid-based method
, and simpl was proposed by Zelinsky et al. [42]. The
ir method
s such as back and forth can be used to cover every has a start cell and a goal cell. A grid represents the coverage area, and a wavefront algorithm is used from the goal cell to the start cell.
The coverage can be achieved by an exhaustive walk that geneIts operation is based on propagating a “wavefront” from the target cell passing through the free cells and bypassing all obstacles to the starting cell.
Mor
ate
s a path to cover each specifically, the transmission of the “wavefront” from the target cell to
execute the path using back and forth motions such as boustrophedonthe starting cell is used to assign specific numbers to each cell of the grid, as shown in
Figure 38.
OfFirst
en, this method is used for agriculture applications where the fields are polygonal and clear from obstacles. Oksanen and Visala [41]ly, 0 is assigned to the target cell and then 1 to all adjacent cells. Then, all the other adjacent cells of 1 to which no number has been assigned are assigned 2. The intpro
duced an algorithm for CPP in agriculturalcess repeats incrementally until the wavefront reaches the starting point [13][20]. The fenvi
elds and used the path cost function to optimize the final pathronment should be known in this method, so the method can be classified offline.
Figure 3. Trapezoidal decomposition.
3.4. Boustrophedon Decomposition
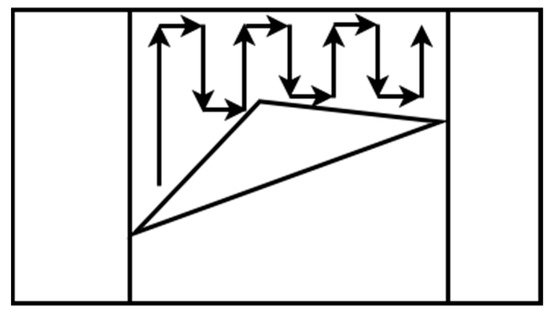
Trapezoidal decomposition produces many cells, some of which can be merged. This characteristic is a disadvantage because as many cells exist, the coverage path will be longer. To overcome this limitation, a method that creates nonconvex cells is needed. The boustrophedon cellular decomposition is similar to trapezoidal decomposition but considers vertices in the area called critical points [33,35]. The boustrophedon decomposition reduces the number of cells compared with trapezoidal decomposition, which means shorter path planning, as shown in Figure 4. As the trapezoidal decomposition, this method is for polygonal areas, and the environment of the coverage area should be known. For this reason, it can be classified as an offline method.
Figure 4. Boustrophedon decomposition.
3.5. Morse-Based Decomposition
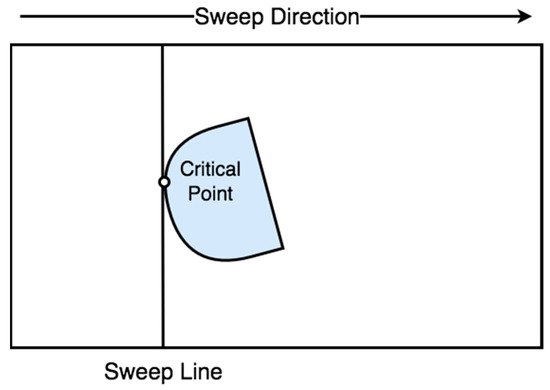
Another cellular decomposition method proposed by Acar et al. [42] is based on Morse functions [43]. The Morse-based decomposition method has the advantage of different cells shapes such as circular and can be applied in any dimensional space, such as concave, polygon, and irregular space. The cell decomposition is succeeded with a slice that sweeps through the area of interest. A slice is discontinued at the critical point of the Morse function, which is restricted from the obstacle boundaries, as shown in Figure 5. This method uses information concerning the area during motion planning. For this reason, the method can be classified as online [44,45].
Figure 5. Morse-based decomposition.
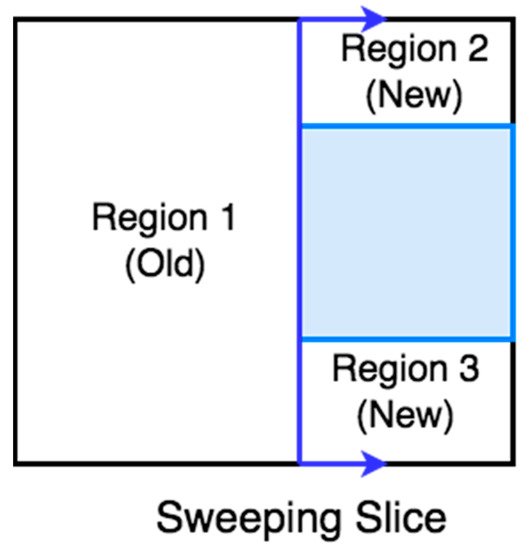
3.6. Online Topological Coverage Algorithm
Wong [46] presented an algorithm that finds the cell boundaries online using slice decomposition. Slice decomposition is a method for determining the cell boundaries using a sweeping line over the area of interest. As the line sweeps over the area, it separates the obstacles and free space in two regions or more, as shown in Figure 6. The algorithm constructs a topological map using the slice decomposition on the area of interest [47].
Figure 6. Slice decomposition.
3.7. Contact Sensor-Based Coverage of Rectilinear Environments
Butler et al. [48] present an exact cell decomposition algorithm for contact sensor-based robots for online coverage of the rectilinear environment. In contact sensor-based coverage, the robot’s path is cycling with retracing, while at the same time it repeatedly constructs a cellular decomposition of the area of interest. When a robot’s full-cycle path is unsuccessful, it chooses a new path based on its position and environment. The robot’s motion depends on the area’s cell decomposition state, updated as the CPP progresses.
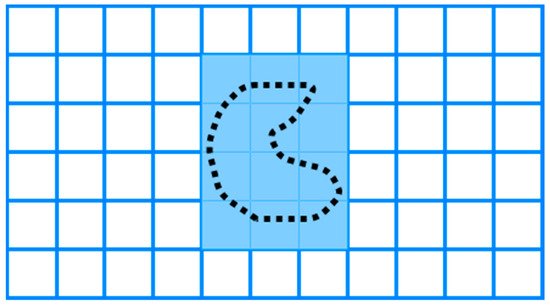
3.8. Grid-Based Methods
Grid-based methods are classified as approximate cellular decomposition due to the restriction of the grid’s shape, which is uniform in space. It is impossible to represent precisely the shape of the target space and its obstacles [19]. The grid-based methods decomposed the space into uniform grid cells, which can be squares or other shapes, as shown in Figure 7. Moravec and Elfes [49] proposed a grid map presentation based on a sonar mounted on a mobile robot mapping an indoor environment.
Figure 7. Grid-based decomposition.
3.8.1 Wavefront Algorithm
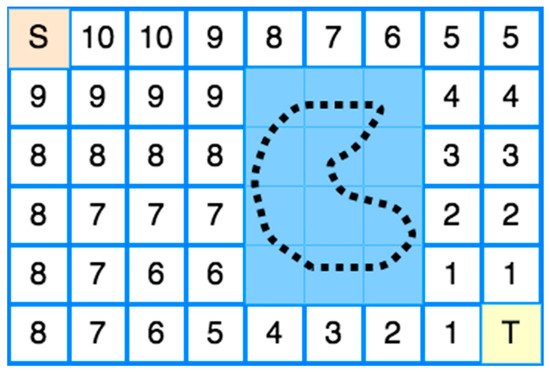
The first CPP’s grid-based method was proposed by Zelinsky et al. [50]. Their method has a start cell and a goal cell. A grid represents the coverage area, and a wavefront algorithm is used from the goal cell to the start cell. Its operation is based on propagating a “wavefront” from the target cell passing through the free cells and bypassing all obstacles to the starting cell.
More specifically, the transmission of the “wavefront” from the target cell to the starting cell is used to assign specific numbers to each cell of the grid, as shown in Figure 8. Firstly, 0 is assigned to the target cell and then 1 to all adjacent cells. Then, all the other adjacent cells of 1 to which no number has been assigned are assigned 2. The process repeats incrementally until the wavefront reaches the starting point [13,20]. The environment should be known in this method, so the method can be classified offline.
Figure 8. Wavefront Transmission from starting cell (S) to target cell (T).
Nevertheless, Shivashankar et al. [51] proposed a wavefront algorithm to accomplish an online CPP with a mobile robot in an unknown spatial environment. Nevertheless, Shivashankar et al. [43] proposed a wavefront algorithm to accomplish an online CPP with a mobile robot in an unknown spatial environment.
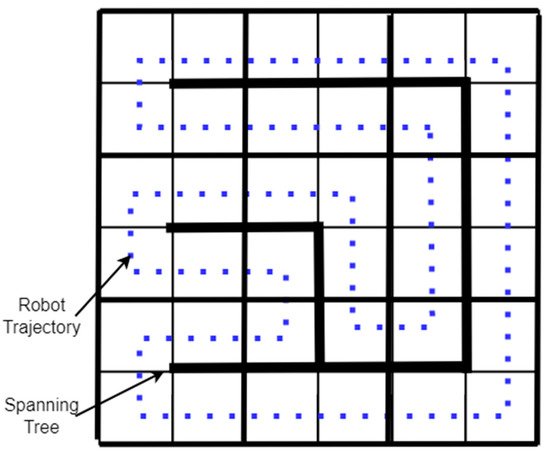
3.8.2 Spanning Tree Coverage
9.2. Spanning Tree Coverage
The spanning tree coverage (STC) algorithm solves the problem of covering an area using a robot [38]. The method used by the STC algorithm is first to decompose the region into cells and calculate a connecting tree of the resulting graph. Finally, the robot’s path starts near the “connecting tree” and follows its perimeter, as shown in The spanning tree coverage (STC) algorithm solves the problem of covering an area using a robot [30]. The method used by the STC algorithm is first to decompose the region into cells and calculate a connecting tree of the resulting graph. Finally, the robot’s path starts near the “connecting tree” and follows its perimeter, as shown in Figure 9 [37]. A Spiral-STC algorithm was proposed by Gabriely and Rimon [52]. This online method converts the space into a grid map. The mobile robots execute a spanning tree-generated spiral path using onboard sensors. [29]. A Spiral-STC algorithm was proposed by Gabriely and Rimon [44]. This online method converts the space into a grid map. The mobile robots execute a spanning tree-generated spiral path using onboard sensors.
Figure 9. Spanning Tree-based coverage.
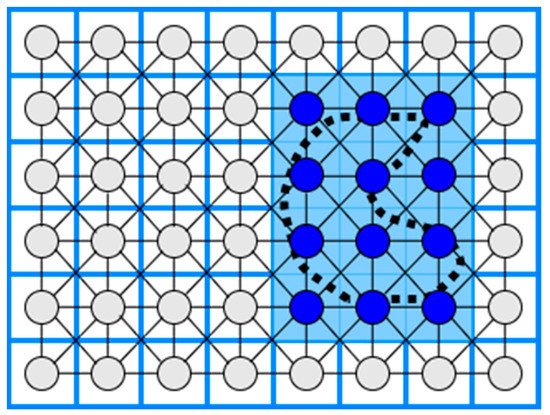
3.9. Neural Network-Based Coverage on Grid Maps
10. Neural Network-Based Coverage on Grid Maps
The CPP using a neural network is an online coverage method. First, in a 2D coverage area, a grid map is constructed where the length of the diagonal of each cell is equal to the coverage radius of the robot (e.g., the coverage radius of a robotic broom), and then a neuron is associated with each cell in the grid. Each neuron is connected to the eight primary neighboring neurons, as shown in Figure 10. Finally, the robot’s path to the coverage area is executed by knowing each output value of each neuron at a given time, so that the robot is attracted to cells it has not visited while at the same time being rejected by cells it has visited [53,54]. . Finally, the robot’s path to the coverage area is executed by knowing each output value of each neuron at a given time, so that the robot is attracted to cells it has not visited while at the same time being rejected by cells it has visited [45][46].
Table 1. CPP and decomposition methods.
| CPP Approach |
Decomposition Method |
Algorithm Processing |
Shape of Area |
Reference |
| Boustrophedon |
None |
Offline |
Rectangular |
[33,34,35] | [25][26][27] |
| Square |
None |
Offline |
Square |
[36] | [28] |
| Boustrophedon, Spiral |
Exact cellular |
Offline |
Polygon, Concave |
[37] | [29] |
| Back and Forth |
Trapezoidal |
Offline |
Polygon |
[39,40] | [31][32] |
| Boustrophedon |
Boustrophedon |
Offline |
Polygon |
[33,35] | [25][27] |
| Boustrophedon |
Morse-based |
Online |
Any dimensional |
[42] | [34] |
| Online Topological |
Slice |
Online |
Polygon |
[46] | [38] |
| Contact Sensor-based |
Exact cellular |
Online |
Rectilinear |
[48] | [40] |
| Wavefront |
Approximate cellular |
Offline |
Polygon, Concave |
[50] | [42] |
| Wavefront |
Approximate cellular |
Online |
Polygon, Concave |
[51] | [43] |
| STC |
Approximate cellular |
Offline |
Polygon, Concave |
[37] | [29] |
| Spiral-STC |
Approximate cellular |
Online |
Polygon, Concave |
[52] | [44] |
| Neural Network-based |
Approximate cellular |
Online |
Polygon, Concave |
[53,54] | [45][46] |
Figure 10. Neural Network-based coverage.
11. Multi-Robot CPP Strategies
3.10. Multi-Robot CPP Strategies
Multiple robots have an advantage over single robotic systems [24]. The use of multiple robots accelerates coverage of an area of interest. The problem of covering an area with multiple robots lies in the calculation of optimal routes in order to minimize the coverage time [38]. Using multiple robots in a CPP work reduces the completion time due to workload division [20]. This section discusses multi-robot coverage methods based on single robot approaches, multi-robot strategies, and multiple UAVs to cover an area of interest. Some drawbacks of multiple UAV strategies are spatial orientation and communication difficulties. Table 2 at the end of this section summarizes the multi-robot CPP strategies and presents the CPP approach, the decomposition method, the algorithm processing, and the corresponding reference.
3.11. Multi-Robot Boustrophedon Decomposition
Rekleitis et al. [16] presented a set of online algorithms for solving the CPP using a group of mobile robots in an unknown environment. The algorithms employ the same planar cellular decomposition as the Boustrophedon single robot coverage algorithm, with additions to manage how robots cover a single cell and distribute among cells. Their solution takes into account the team members’ communication limitations. The robots serve two roles to accomplish coverage where some members, known as explorers, cover the boundaries of the actual target cell, while others, known as coverers, conduct basic back-and-forth motions to cover the cell.
3.12. Multi-Robot Spanning Tree Coverage
Their experimental data reveal that their technique outperforms multi-robot spanning tree coverage (MSTC) by a significant margin. Nevertheless, the coverage time of an area with the multi-robot forest coverage (MFC) algorithm is shorter than the MSTC algorithm [38]. Moreover, an online, robust version of MSTC was provided by Hazon et al. [55]. They show that the approach is robust analytically, providing as much coverage as a single robot can.
3.13. Multi-Robot Neural Network-Based Coverage
A neural network approach for multi-robot coverage where each robot sees all the others as obstacles and the avoidance ability of stalemate situations was proposed by Luo and Yang [54,56,57]. The multi-robot neural-network based coverage is inspired by single robot neural-network coverage. During the coverage of the irregular-shaped area of interest, the robots see each other as moving obstacles.
3.14. Multi-Robot Graph-Based and Boundary Coverage
Easton and Burdick [58] presented a two-dimensional boundary coverage method for multiple robots. A team of robots must inspect all points on the boundary of the two-dimensional target environment, and each robot’s inspection routes are planned to use a heuristic search. The planned paths cover the entire boundary. Moreover, the algorithm has been validated by simulations. The multi-robot boundary coverage is inspired by the need to inspect the blade surfaces inside a turbine.
Table 2. Multi-robot CPP strategies.
| CPP Approach |
Decomposition Method |
Algorithm Processing |
Reference |
| Boustrophedon |
Exact cellular |
Online |
[16] |
| Spanning Tree Coverage |
Approximate cellular |
Online |
[55] |
| Neural network-based |
Approximate cellular |
Online |
[54,56,57] |
| Graph-based and Boundary |
Approximate cellular |
Offline |
[58] |
3.15. Multi-UAV CPP Methods
The number of applications where UAVs can be used is increasing as remote-sensing technology is developed. In the literature, there are a lot of multi-UAV CPP methods using different coverage algorithms with heterogeneous or homogeneous UAVs that were used in a variety of applications, such as agriculture [59], surveillance [60], mapping [61], and search and rescue missions [62]. Table 3 at the end of this section summarizes the multi-UAV CPP strategies and presents the CPP approach, the type of UAVs, the algorithm processing, the evaluation metrics, and the corresponding reference.
3.16. Multi-UAV Coverage
In the agricultural sector, Barrientos et al. [13] proposed a method for area coverage using a fleet of mini aerial robots. Their method divides the area of interest in k non-overlapping subtasks and assigns them in k UAVs. A decentralized method for surveillance missions using homogeneous UAVs was proposed by Acevedo et al. [63]. This method’s primary goal is to minimize latency, which means a short sharing time of information between the UAVs. In a later work, Acevedo et al. [64] developed a method for surveillance in urban environments with heterogeneous UAVs that fly at low altitudes and avoid obstacles. Finally, in their most recent work, Acevedo et al. [65] developed a method based on grid-shape area partition, which can readjust the area shape and UAVs’ capacity.
A terrain coverage method using a fleet of heterogeneous UAVs was presented by Maza and Ollero [61]. Their method divides the irregular-shaped area of interest per each UAV capability, such as total flight time. Each partition is assigned to a UAV that plans a zig-zag covering pattern according to the area’s characteristics to minimize the number of turns. The method was validated in simulation.
A coverage algorithm for fixed-wing UAVs with the ability for obstacle and previously scanned regions avoidance was presented by Xu et al. [23,66]. Their method uses boustrophedon cellular decomposition [33], an exact cellular decomposition, and presents better accuracy than trapezoidal decomposition. The method can be classified as online in the phase of region scanning and offline in the coverage phase.
3.17. Back-and-Forth
Maza and Ollero [61] present a cooperative technique using heterogeneous UAVs in a convex polygonal area. A ground control station divides the area into sub-regions and assigns them to every UAV by the capability and starting position. Every UAV calculates back-and-forth patterns according to the camera footprint to reduce the number of turns.
3.18. Spiral
Balampanis et al. [67,68] present a spiral CPP algorithm using multiple heterogeneous UAVs. The area of interest is divided according to UAVs sensing capabilities using a constrained Delaunay triangulation (CDT) [69]. The CDT generates triangle cells that match almost exactly the shape of the area of interest. To make the triangles more uniform, they applied Lloyd optimization [70]. Then, a spiral algorithm generates the coverage pattern for each sub-area. This method can generate smoother trajectories considering avoiding no-fly zones and the shape of the coverage area. However, it generates more extensive coverage paths and a higher number of turns than classical grid decomposition and motion methods [71,72].
3.19. Multi-Objective Path Planning (MOPP) with Genetic Algorithm (GA)
Hayat et al. [73] propose multi-objective path planning (MOPP) with a genetic algorithm (GA) for search and rescue missions using multiple UAVs. The mission is divided into two phases: search and response. The search phase monitors an event to guarantee the total coverage in a given area, and the response phase spreads detection updates on the network. The MOPP algorithm performs the planning task during the search, while the GA minimizes the mission completion time. As a result, the method can be classified as offline in the search phase and online in the response phase.
3.20. Genetic Algorithm (GA) with Flood Fill Algorithm
Based on the Trujillo et al. [74] approach, Darrah et al. [75] present a CPP method for missions over more extensive areas using multi-UAVs. The method produces equitable sub-areas of the area of interest to cover by multi-UAVs or several flights performed by a single UAV. The flood fill algorithm integrated with game theory was applied to partition the area of interest. Each UAV is a player and has a starting position. According to a predefined pattern in a diamond shape, the UAVs take turns flooding the neighbor cells. The UAVs cannot fly over building cells or cells previously occupied by other UAVs. The partitioning method guarantees an approximate amount of work for each assigned UAV by balancing the tasks. An improved version of the approach proposed by Trujillo et al. [74] was used for each sub-area’s coverage trajectories. The method can be classified initially as offline and then as online.
Table 3. Multi-UAV CPP strategies.
| CPP Approach |
Type of UAVs |
Algorithm Processing |
Evaluation Metrics |
Reference |
| Sub-perimeter method |
Homogeneous |
Online |
Minimize latency |
[63] |
| Back-and-Forth |
Homogeneous |
Online/Offline |
Total path length
Time coverage |
[23,66] |
| Back-and-Forth |
Heterogeneous |
Offline |
Number of turns |
[61] |
| Spiral |
Heterogeneous |
Offline |
Coverage path, Number of turns |
[67,68] |
| Multi-Objective Path Planning with GA |
Homogeneous |
Offline/Online |
Mission Completion Time |
[73] |
| GA with flood fill algorithm |
Homogeneous |
Offline/Online |
Path length |
[74,75] |
3.21. Energy-Saving CPP Algorithms
In the literature, there are a lot of CPP strategies for energy saving. One method for energy saving proposed by Lawrance and Sukkarieh [25] is the energy exploitation of the wind using a small gliding UAV. The authors present an algorithm that generates energy gain paths according to the UAV’s constraints, the field’s wind conditions, and static and dynamic soaring. One of the limitations of this method is the requirement for prior knowledge of the field’s wind conditions. In future research, an online stochastic wind estimation and planning method using current wind conditions of the field should be developed.
Another method for minimizing the power consumption of a UAV is reducing the number of turns of the CPP. Torres et al. [76] present an algorithm that reduces the number of turns and the total flying path to minimize battery consumption.
The effect of wind direction and intensity on the time of mission completion was presented by Coombes et al. [77]. The authors used a fixed-wing UAV and the boustrophedon method to cover the area of interest. Their simulated experiments used a constant direction of the wind and six different speeds, and for the coverage path used different directions of the fixed-wing UAV motion from 0 to 360 degrees in increments of 10 degrees. The results showed that the direction of the coverage path should be 90 degrees to the wind direction to minimize the coverage time. Furthermore, the direction of the turns is directly affected by the vertical component of the wind. In a later work, Coombes et al. [78] presented the flight time in wind (FTIW) function, which computes the total flight time for a total coverage of the area of interest. The flight time needed for the total coverage of the area is less than the previous methods. Their approach was validated after simulations and real flights.
An energy-efficient back and forth CPP algorithm proposed by Di Franco and Buttazzo [18] computes the best motion trajectory and the maximum altitude according to the ground sample distance (image resolution) to minimize the number of turns. Another approach for energy efficiency is to find an optimal constant speed according to the coverage path. An energy-aware spiral CPP algorithm uses wider angle turns to minimize the acceleration and deceleration to maintain an optimal constant speed Cabreira et al. [79]. After simulated and real flights, the most energy-efficient CPP method between energy-efficient back and forth CPP [18] and the energy-aware spiral CPP approach proposed by Cabreira et al. [79] for a convex area was the energy-aware spiral CPP method which adopted the energy model proposed by Di Franco and Buttazo [80].
Another energy-aware CPP algorithm for UAVs was proposed by Li et al. [81], where the algorithm has three stages. In the first stage, the algorithm builds a 3D terrain model. In the second stage, constant power consumption is computed by total take-off weight, flight speed, and air friction. In the third stage, a genetic algorithm generates an energy-optimal coverage path, which represents the amount of energy consumption in every part of the path.
Another problem concerning UAV energy consumption is the deceleration and acceleration at every turn of a conventional trajectory such as boustrophedon. Artemenko et al. [82] present an algorithm that modifies conventional trajectories using Bézier curves, smoothing the turns on a given path to minimize deceleration and acceleration before and after the turning point. The authors concluded that their algorithm could reduce energy spending compared to conventional algorithms. Restrictions, such as the UAV motion and camera’s location, can be overcome using integer linear programming. Ahmadzadeh et al. [83] present a cooperative coverage technique with critical time for rectangular areas utilizing several fixed-wing heterogeneous UAVs, some carrying a frontal camera, flying circular paths and some of them carrying a camera on the left side, flying straight lines with left turn paths. Their proposed method uses four fixed-wing UAVs covering 100% of the area of interest instead of the simple methods covering 80%. The proposal was validated in simulation tests and real flights.
Araujo et al. [84] propose an algorithm where the workspace is divided into sub-areas assigned to each UAV according to its relative capability. According to the kinematics constraints of the UAVs, the algorithm generates an optimal number of stripes to minimize the number of stripes and eventually the number of turns, which means less energy consumption.
Majeed and Lee [85] present a CPP method for UAV low-altitude navigation in three-dimensional urban areas with fixed convex obstacles based on footprint sweeps fitting and a sparse waypoint graph. The primary goals of the proposed approach are to reduce computational time, the number of turns, and path overlapping while minimizing the total coverage path of the area of interest. The suggested method outperforms the similarly related CPP approaches according to simulation findings.
In a later work, Majeed and Hwang [86] present a CPP algorithm for UAV navigation to cover areas of interest (AOIs) surrounded by obstacles in three-dimensional urban areas with fixed obstacles. The proposed method is applicable in a wide range of practical applications that involve computing a low-cost coverage for spatially distributed AOIs in an urban environment. However, the proposed algorithm has not incorporated and tested for constraints and limitations, such as image resolution and UAV battery.
Cheng et al. [87] present a bio-inspired method for cooperative coverage. This method represents the trajectory of each UAV as the B-spline curve containing control points. This optimization problem aims to maximize the desirability of a path by combining four variables: path distance, minimum turning angle, maximum pitch rate, and superposition of the actual trajectory over different UAV trajectories. According to the authors, the beginning and last control points are at the area’s borders because the UAV always travels from left to right. The ant colony optimization (ACO) algorithm was adapted for coverage with multiple UAVs by Kuiper and Nadjm-Tehrani [88]. The y-axis in the intermediate control points is optimized using the ACO algorithm to maximize the coverage. Several ants are launched during the algorithm repetitions, passing through the starting, intermediate, and endpoints.
Table 4 summarizes the energy-saving CPP methods reviewed in this paper according to the method used for energy saving. The table presents the CPP method, the energy-saving factor, the type of UAV, and the corresponding reference.
Table 4. CPP energy-aware methods.
| CPP Method |
Energy-Saving Approach |
Type of UAV |
Reference |
| Energy gain path |
Energy exploitation of the wind |
Fixed-wing |
[25] |
| Back and Forth |
Reducing the number of turns and the total flying path |
Rotorcraft |
[76] |
| Boustrophedon |
The direction of the UAV path and the turns according to the wind direction |
Fixed-wing |
[77] |
| Back and Forth |
Altitude maximization according to the Ground Sample Distance to reduce the number of turns |
Rotorcraft |
[18] |
| Spiral |
Wider angle turns to minimize the acceleration and deceleration |
Rotorcraft |
[79] |
| Three stages energy optimal path |
An energy-aware algorithm computes the take-off weight, flight speed, and air friction to generate an energy-optimal path |
Rotorcraft |
[81] |
| Smoothing turns |
Smoothing the turns on a given path to minimize deceleration and acceleration before and after the turning point |
Rotorcraft/Fixed-wing |
[82] |
| Circular and straight lines with left turns paths |
Cooperative coverage algorithm with critical time |
Multiple Fixed-wing |
[83] |
| Back and Forth |
Minimizing the number of stripes and eventually the number of turns |
Multiple Fixed-wing |
[84] |
| Back and Forth |
Reduce computational time, the number of turns, and path overlapping while minimizing the total coverage path |
Rotorcraft |
[85] |
| Back and Forth |
Reducing the computational time and path length for the inter-regional path, the number of turning maneuvers, and path overlapping |
Rotorcraft |
[86] |
| ACO with Gaussian distribution functions |
Path length, rotation angle, and area overlapping rate |
Rotorcraft/Fixed-wing |
[87] |
4. Discussion
TMultiple robots h
ave
CPP probleman advantage over single robotic systems [24]. The us
e of multi
ng UAVs iple robots accelerates coverage of an area
s of interest
with different shapes and environmental co. The problem of covering an area with multiple robots lies in the calculation of optimal routes in order to minimize the coverage time [30]. Usin
dg multi
tions has been studiple robots in a CPP work reduces the completion time due to workload division [20]. This se
ction d
by several authors. Standard-shaped areasiscusses multi-robot coverage methods based on single robot approaches, multi-robot strategies, and multiple UAVs to cover an area of interest
, such as polygons and rectangles,. Some drawbacks of multiple UAV strategies are spatial orientation and communication difficulties. Table 2 at the end
o not require of this section summarizes the multi-robot CPP strategies and presents the CPP approach, the decomposition
and can be covmethod, the algorithm processing, and the corresponding reference.
12. Multi-Robot Boustrophedon Decomposition
Rekleitis e
t al. [16] pr
esented
by boustrophedon and spiral patterns. Generally, no a set of online algorithms for solving the CPP using a group of mobile robots in an unknown environment. The algorithms employ the same planar cellular decomposition
methods, such as back-and-forth, require low computational cost to find the path trajectory. The main issueas the Boustrophedon single robot coverage algorithm, with additions to manage how robots cover a single cell and distribute among cells. Their solution takes into account the team members’ communication limitations. The robots serve two roles to accomplish coverage where some members, known as explorers, cover the boundaries of the
se patterns is not cons actual target cell, while others, known as coverers, conduct basic back-and-forth motions to cover the cell.
13. Multi-Robot Spanning Tree Coverage
Thei
dr experi
ngmental data reveal that the
UAVs are directly aerodynamicallyir technique outperforms multi-robot spanning tree coverage (MSTC) by a significant margin. Nevertheless, the coverage time of an area with the multi-robot forest coverage (MFC) algorithm is shorter than the MSTC algorithm [30]. Moreover, a
ffn online
cted by t, robust version of MSTC was provided by Hazon et al. [47]. The
y environmentashow that the approach is robust analytically, providing as much coverage as a single robot can.
14. Multi-Robot Neural Network-Based Coverage
A neural
network approac
onditions, which meansh for multi-robot coverage where each robot sees all the others as obstacles and the a
ctual trajectory ofvoidance ability of stalemate situations was proposed by Luo and Yang [46][48][49]. tThe
flight in most cases is not close to that planned.
Imulti-robot neural-network based coverage is inspired by single robot neural-network coverage. During the coverage of the irregular-shaped area of interest, more complexthe robots see each other as moving obstacles.
15. Multi-Robot Graph-Based and Boundary Coverage
Easton and
Burdi
ck [50] pr
esented a two-dimensional boundar
egular areas of interest, a cellular decomposition method may be applied to split the area of interest into subregionsy coverage method for multiple robots. A team of robots must inspect all points on the boundary of the two-dimensional target environment, and each robot’s inspection routes are planned to use a heuristic search. The planned paths cover the entire boundary. Moreover, the algorithm has been validated by simulations. The multi-robot boundary coverage is inspired by the need to inspect the blade surfaces inside a turbine.
Table 2. Multi-robot CPP strategies.
| CPP Approach |
Decomposition Method |
Algorithm Processing |
Reference |
| Boustrophedon |
Exact cellular |
Online |
[16] |
| Spanning Tree Coverage |
Approximate cellular |
Online |
[47] |
| Neural network-based |
Approximate cellular |
Online |
[46][48][49] |
| Graph-based and Boundary |
Approximate cellular |
Offline |
[50] |
16. Multi-UAV CPP Methods
The
snu
bregions mber of applications where UAVs can be
covered by differentused is increasing as remote-sensing technology is developed. In the literature, there are a lot of multi-UAV CPP methods
to obtain the optimum path to minimize the totalusing different coverage algorithms with heterogeneous or homogeneous UAVs that were used in a variety of applications, such as agriculture [51], surveillance [52], mapp
ing [53], a
tnd search and
the torescue missions [54]. Table 3 at
al coverage flight time. Mthe end of this section summarizes the multi-UAV
cooperative strategies are also being studied using CPP strategies and presents the CPP approach, the type of UAVs, the algorithm processing, the evaluation metrics, and the corresponding reference.
17. Multi-UAV Coverage
In the
dagricultural sec
omposititor, Barrientos et al. [13] propo
nsed a method
according to the capabilities of thefor area coverage using a fleet of mini aerial robots. Their method divides the area of interest in k non-overlapping subtasks and assigns them in k UAVs.
Wh A decen
tralized the vehicle used for themethod for surveillance missions using homogeneous UAVs was proposed
CPP alby Acevedo et al. [55]. This method’s primary go
ral is to minimi
thms is a UAV, tze latency, which means a short sharing time of information between the UAVs. In a later work, Acevedo et al. [56] developed a meth
od for surve
re is the limitation of thillance in urban environments with heterogeneous UAVs that fly at low altitudes and avoid obstacles. Finally, in their most recent work, Acevedo et al. [57] develope
d a m
otion constraints, such as the feasibleethod based on grid-shape area partition, which can readjust the area shape and UAVs’ capacity.
A t
er
ajectory of fixed-wing UAVs. However,rain coverage method using a fleet of heterogeneous UAVs was presented by Maza and Ollero [53]. tThe
CPP methods plan their method divides the irregular-shaped area of interest per each UAV capability, such as total flight time. Each partition is assigned to a UAV that plans a zig-zag cover
age pathing pattern according to
a performance metric. These approaches do not the area’s characteristics to minimize the number of turns. The method was validated in simulation.
A co
nsidver
the UAVs’ environmental factors and aerodynamic and flight lage algorithm for fixed-wing UAVs with the ability for obstacle and previously scanned regions avoidance was presented by Xu et al. [23][58]. Thei
r m
itations.
Aethod uses fbou
rther studystrophedon cellular decomposition is[25], an
ecessary for the area of CPP exact cellular decomposition, and presents better accuracy than trapezoidal decomposition. The method
s using UAVs. T can be classified as online in the phase of region scanning and offline in the coverage
aphase.
18. Back-and-Forth
Maza and Oll
gero [53] present a coo
per
ithms should consider the constraints of the aerial vehicles, such as the actual path trajectory rather thative technique using heterogeneous UAVs in a convex polygonal area. A ground control station divides the area into sub-regions and assigns them to every UAV by the capability and starting position. Every UAV calculates back-and-forth patterns according to the camera footprint to reduce the number of turns.
19. Spiral
Balampan
is thaet al. [59][60] present
a planned. Moreover, the environmspiral CPP algorithm using multiple heterogeneous UAVs. The area of interest is divided according to UAVs sensing capabilities using a constrained Delaunay triangulation (CDT) [61]. The CDT gen
erat
al factors ines triangle cells that match almost exactly the shape of the area of interest
that affect the path, the time, and. To make the triangles more uniform, they applied Lloyd optimization [62]. tThe
actual flight path should also ben, a spiral algorithm generates the coverage pattern for each sub-area. This method can generate smoother trajectories consider
ed. According to all these mutable factors, an offline CPP method will not achieve optiming avoiding no-fly zones and the shape of the coverage area. However, it generates more extensive coverage paths and a higher number of turns than classical grid decomposition and motion methods [63][64].
20. Multi-Objective Path Planning (MOPP) with Genetic Algorithm (GA)
Haya
t et al
. [65] p
ropose multi-objective path planning
, but an online CPP method considering all these factors (MOPP) with a genetic algorithm (GA) for search and rescue missions using multiple UAVs. The mission is divided into two phases: search and re
-planningsponse. The search phase monitors an event to guarantee the t
rajectory will achieve the optimal coverage path withinotal coverage in a given area, and the response phase spreads detection updates on the network. The MOPP algorithm performs the planning task during the search, while the GA minim
um time.
Iizes the mission recent years, many new CPP algorithms have been ompletion time. As a result, the method can be classified as offline in the search phase and online in the response phase.
21. Genetic Algorithm (GA) with Flood Fill Algorithm
Based
on the
vel Trujillo et al. [66] appro
ach, Darrah et al. [67] p
rese
nt a CPP method for
energy-efficiency and awarenesmissions over more extensive areas using multi-UAVs. The
approach using a glider UAV for soaring limits early knowledge of the field’s wind conditions. Otherwise, the method is less effectivemethod produces equitable sub-areas of the area of interest to cover by multi-UAVs or several flights performed by a single UAV. The flood fill algorithm integrated with game theory was applied to partition the area of interest. Each UAV is a player and has a starting position. According to a predefined pattern in a
situation where the knowledge of wind conditions is limited [25].diamond shape, the UAVs take turns flooding the neighbor cells. The UAVs cannot fly over building cells or cells previously occupied by other UAVs. The partitioning method guarantees Ian appro
aches where engine-drivenximate amount of work for each assigned UAV by balancing the tasks. An improved version of the approach proposed by Trujillo et al. UAVs[66] wa
re used, there are soms used for each sub-area’s coverage trajectories. The method
s or combin can be classified initially as offline and then as online.
Table 3. Multi-UAV CPP strategies.
| CPP Approach |
Type of UAVs |
Algorithm Processing |
Evaluation Metrics |
Reference |
| Sub-perimeter method |
Homogeneous |
Online |
Minimize latency |
[55] |
| Back-and-Forth |
Homogeneous |
Online/Offline |
Total path length
Time coverage |
[23][58] |
| Back-and-Forth |
Heterogeneous |
Offline |
Number of turns |
[53] |
| Spiral |
Heterogeneous |
Offline |
Coverage path, Number of turns |
[59][60] |
| Multi-Objective Path Planning with GA |
Homogeneous |
Offline/Online |
Mission Completion Time |
[65] |
| GA with flood fill algorithm |
Homogeneous |
Offline/Online |
Path length |
[66][67] |
22. Energy-Saving CPP Algorithms
In the literat
ure, there are a lot of CPP strategi
ones for energy saving.
AOne method for
powerenergy saving
in non-complex areasproposed by Lawrance and Sukkarieh [68] is
the ener
educing the number of turns in tgy exploitation of the wind using a small gliding UAV. The authors present an algorithm that generates energy gain paths according to the UAV’s
trajectory to minimize the total path and the accelconstraints, the field’s wind conditions, and static and dynamic soaring. One of the limitations of this method is the requirement for prior knowledge of the field’s wind conditions. In future research, an online stochastic wind estimation and planning method using current wind conditions of the field should be developed.
Another
a met
ion’shod for minimizing the power consumption
after ev of a UAV is reducing the number of turns of the CPP. Torres et al. [69] present an algorithm that reduces the number
y of turn
, and eventually the tots and the total flying path to minimize battery consumption.
The effect of wind direction a
nd intensity on the time of mission compl
covetion was presented by Coombes et al. [70]. The
author
age time ofs used a fixed-wing UAV and the boustrophedon method to cover the area of interest
[20,76].
InTheir approaches for energy saving, considering the direction and intensity of the wind was validated as the UAV’ssimulated experiments used a constant direction of the wind and six different speeds, and for the coverage path used different directions of the fixed-wing UAV motion from 0 to 360 degrees in increments of 10 degrees. The results showed that the direction of the coverage path should be
vertical in the wind90 degrees to the wind direction to minimize the coverage time. Furthermore, the direction
, and of the turn
ing maneuvers against s is directly affected by the vertical component of the wind
. In a later work, Coombes et al. [71] presented
the fli
rection [77ght time in wind (FTIW) function,
78]. Twhi
s approach can be combined withch computes the total flight time for a total coverage of the area of interest. The flight time needed for the total coverage of the area is less than the previous method
for greater es. Their approach was validated after simulations and real flights.
An energy saving.
Tw-efficient back and fo
rth more approaCPP algorithm proposed by Di Franco and Buttazzo [18] c
omputes the
s that can be used in combination with the previous methods for further best motion trajectory and the maximum altitude according to the ground sample distance (image resolution) to minimize the number of turns. Another approach for energy
saving include minimizing the UAV’s turnsefficiency is to find an optimal constant speed according to the
GSD [18]coverage path. A
n energy-aware spiral CPP algorithm uses wider angle turns to m
aintain a inimize the acceleration and deceleration to maintain an optimal constant speed
[67]Cabreira et al. [72]. oAfter
an algorithm forsimulated and real flights, the most energy-efficient CPP method between energy-efficient back and forth CPP [18] a
nd conventional trajectthe energy-aware spiral CPP approach proposed by Cabreira et al. [72] for
y that modifiea convex area was the
turns for smoother motion [70] energy-aware spiral CPP method which adopted the energy model proposed by Di Franco and Butt
azo
mi[73].
An
imize othe
deceleration and accelr energy-aware CPP algorithm for UAVs was proposed by Li et al. [74], wher
e the a
tion before and after the turning point. Another energy-aware algorithmlgorithm has three stages. In the first stage, the algorithm builds a 3D terrain model. In the second stage, constant power consumption is compute
s thed by total take-off weight, flight speed, and air frictio
n ton. In the third stage, a genetic algorithm generate
s an energy-optimal
path [81].
Icoverage path, which represents the amount of energy convex areas, sumption in every part of the path.
Another
e are approaches using multiple UAVs to divide into sub-areasproblem concerning UAV energy consumption is the deceleration and a
ssign each sub-area according to the UAV’s capability,cceleration at every turn of a conventional trajectory such as
motion, sensoboustrophedon. Artemenko et al. [75] pr
es
onboard, and total endurance flight time [83ent an algorithm that modifies conventional trajectories using Bézier curves,
84].
T smoothing the
ptur
oposed energy-efficient UAV CPP methods aim ns on a given path to minimize
the total flight timdeceleration and acceleration before and
the coverage path length to save energy. However, the performance metrics are based on the path trajectory without considering other constraintafter the turning point. The authors concluded that their algorithm could reduce energy spending compared to conventional algorithms. Restrictions, such as
UAV aerodynamics and environmental conditions. For examthe UAV motion and camera’s location, can be overcome using integer linear programming. Ahmadzadeh et al. [76] p
lrese
, in a convex area, a CPP methodnt a cooperative coverage technique with
a performance metric for minimum path trajectory may produce very sharp turns. Meanwhile, it is infeasible for a critical time for rectangular areas utilizing several fixed-wing heterogeneous UAVs, some carrying a frontal camera, flying circular paths and some of them carrying a camera on the left side, flying straight lines with left turn paths. Their proposed method uses four fixed-wing UAV
to obtain the planned ts covering 100% of the area of interest instead of the simple methods covering 80%. The proposal was validated in simulation tests and real flights.
Ara
uj
eo et al. [77] propose an algorithm where the workspac
e is divided into
ry due sub-areas assigned to each UAV according to its
aerodynamrelative capability. According to the kinematics constraints
. Another variable affecting the UAV’s actual trajecto of the UAVs, the algorithm generates an optimal number of stripes to minimize the number of stripes and eventually the number of turns, which means less energy consumption.
Majeed and Lee [78] pr
yesent a is the wind’s direction and intensityCPP method for UAV low-altitude navigation in three-dimensional urban areas with fixed convex obstacles based on footprint sweeps fitting and a sparse waypoint graph. The
UAV will consume more energy than a more extensivprimary goals of the proposed approach are to reduce computational time, the number of turns, and path overlapping while minimizing the total coverage path
length with smoother turns consideringof the area of interest. The suggested method outperforms the similarly related CPP approaches according to simulation findings.
In a
l
later work, Majeed and Hwang [79] thprese
limitations.
Ant a CPP algorithm for UAV navigation to cover areas ofurther study is necessary to combine all of the above constraints to develop new energy-efficient UAV CPP methods that consider variable interest (AOIs) surrounded by obstacles in three-dimensional urban areas with fixed obstacles. The proposed method is applicable in a wide range of practical applications that involve computing a low-cost coverage for spatially distributed AOIs in an urban environment. However, the proposed algorithm has not incorporated and tested for constraints and limitations, such as the vehicle kinematics and enviroimage resolution and UAV battery.
Chen
mg e
ntalt al. co[80] presen
dit
ions offline and online. A research direction to develop UAV CPP method a bio-inspired method for cooperative coverage. This method represents the trajectory of each UAV as the B-spline curve containing control points. This optimization problem aims to maximize
energy-saving should combine machine learning or deep learthe desirability of a path by combining four variables: path distance, minimum turning angle, maximum pitch rate, and superposition of the actual trajectory over different UAV trajectories. According to the authors, the beginning and
IoT onboard sensors in order to develop a CPP approach that will plan last control points are at the area’s borders because the UAV always travels from left to right. The ant colony optimization (ACO) algorithm was adapted for coverage with multiple UAVs by Kuiper and Nadjm-Tehrani offl[81]. The y-axis in
the
and adapt onlinintermediate control points is optimized using the ACO algorithm to maximize the coverage
path trajectory according to the main performance met. Several ants are launched during the algorithm repetitions, passing through the starting, intermediate, and endpoints.
Table 4 summariczes, such as UAV kinematics constraints, and the information retrieved from onboard sensors such as wind conditions the energy-saving CPP methods reviewed in this paper according to the method used for energy saving. The table presents the CPP method, the energy-saving factor, the type of UAV, and the corresponding reference.
Table 4. CPP energy-aware methods.
| CPP Method |
Energy-Saving Approach |
Type of UAV |
Reference |
| Energy gain path |
Energy exploitation of the wind |
Fixed-wing |
[68] |
| Back and Forth |
Reducing the number of turns and the total flying path |
Rotorcraft |
[69] |
| Boustrophedon |
The direction of the UAV path and the turns according to the wind direction |
Fixed-wing |
[70] |
| Back and Forth |
Altitude maximization according to the Ground Sample Distance to reduce the number of turns |
Rotorcraft |
[18] |
| Spiral |
Wider angle turns to minimize the acceleration and deceleration |
Rotorcraft |
[72] |
| Three stages energy optimal path |
An energy-aware algorithm computes the take-off weight, flight speed, and air friction to generate an energy-optimal path |
Rotorcraft |
[74] |
| Smoothing turns |
Smoothing the turns on a given path to minimize deceleration and acceleration before and after the turning point |
Rotorcraft/Fixed-wing |
[75] |
| Circular and straight lines with left turns paths |
Cooperative coverage algorithm with critical time |
Multiple Fixed-wing |
[76] |
| Back and Forth |
Minimizing the number of stripes and eventually the number of turns |
Multiple Fixed-wing |
[77] |
| Back and Forth |
Reduce computational time, the number of turns, and path overlapping while minimizing the total coverage path |
Rotorcraft |
[78] |
| Back and Forth |
Reducing the computational time and path length for the inter-regional path, the number of turning maneuvers, and path overlapping |
Rotorcraft |
[79] |
| ACO with Gaussian distribution functions |
Path length, rotation angle, and area overlapping rate |
Rotorcraft/Fixed-wing |
[80] |