Currently, a variety of sensing methods based on optics, acoustics, and electromagnetics are widely applied for ocean observation and exploration. Acoustic sensing contains various sonar devices for seafloor mapping, submersible navigation, and underwater object. Optical sensing technologies applied to ocean exploration include underwater imaging for objects inspection, spectrophotometry, and fluorophotometry for environmental parameters monitoring. Technologies of electromagnetics are used for underwater metal detection such as mines and mineral resources, and for underwater inspections of cables and pipelines.
- submersible
- sensors
1. Geological Survey
2. Navigation and Communication
Underwater navigation and communication are the key technologies to locate and control submersibles. Due to the high attenuation in seawater, the Global Navigation Satellite System (GNSS) cannot be used underwater [5]. For long-term tasks, submersibles must be equipped with high-precision navigation systems. Inertial/dead reckoning (DR), acoustic and geophysical navigation are introduced for underwater navigation. In addition, different technologies are developed for underwater communications. However, there is still no high bandwidth, long-distance, and low power consumption communication solution until now.2.1. Location and Navigation
| Classifications | Principles | Methods | Characteristics |
|---|---|---|---|
| Inertial/dead reckoning | uses accelerometers and gyroscopes to estimate the current state | Magnetic compass, barometer or pressure sensor, DVL, INS | Increasing and unbounded position error |
| Acoustic Navigation | measuring the time of flight (TOF) of signals from acoustic beacons to perform navigate | LBL, UBL, USBL | Depending on beacons |
| Geophysical Navigation | use external environmental information as references for navigation | Magnetic field maps, visual-based seabed images, identify feature acoustically | Depending on sensors to identify environmental features |
2.2. Underwater Communication
3. Essential Ocean Variables
Human activities in coastal areas are increasing because the exploration and exploitation of the ocean are becoming more and more intensive. Most of the pollution in the ocean comes from human activities, including oil spills, garbage dumping, and domestic and industrial wastewater discharge [9][10]. The ocean has a vast area, so the source of pollution can be anywhere in any country, which makes it challenging to prevent. In addition, once the ocean is polluted, it will spread globally through ocean currents. Ocean has a considerable influence on the global climate and ecosystem. Although the ocean has a robust self-healing ecosystem, it takes a long time to recover. Therefore, it is vital to have overwhelming monitoring of the ocean environmental conditions, significantly how human activities impact the marine ecosystem. The Global Ocean Observing System (GOOS) has listed many ocean research and assessment variables, called essential ocean variables (EOVs) [11]. They are divided into four classes, physics, biochemistry, biology, and ecosystems, and cross-disciplinary. Most commercially used sensors can cover EOVs in physics and biochemistry.3.1. CTD—Conductivity, Temperature and Depth
CTD is an instrument applied to measure conductivity, temperature, and depth in the ocean, playing an essential role in submersible navigation and environmental monitoring. Among them, the measurement of salinity, namely conductivity, is the most complex. As early as 1901, Knudsen discovered that seawater salinity could be calculated using electrical conductivity, but it was not until the 1950s that people began to put this method into practice [12]. The first multifunctional salinity sensing instrument, salinity-temperature-depth (STD), was developed [13]. Three years later, to fix the fouling problem when used in seawater, an inductive cell was added to STD [14]. In the following decades, digitalization and microprocessor were added into the development of sensing instruments gradually, which solved salinity ’spiking’ issues caused by a mismatch of sensor response time between temperature and conductivity [15]. After that, the practical salinity scale was proposed, which leads to the generalization and standardization of the measurement [16][17]. In the following 30 years, the practical salinity scale of 1978 (PSS-78) [18] has made significant contributions to the research of the oceans. The most classic CTD of Seabird should be the SBE-41 series CTDs, which is designed for the Argo program to profiling 2000 m underwater. Over 15,000 SBE-41 CTDs have been equipped on Argo floats, which validated the stability of these products. In 2010, TEOS-10 was introduced and gradually replaced the practical salinity scale (EOS-80), which has also been accepted by various organizations worldwide [19]. This new standard calculates the properties of seawater by constructing a Gibbs function for seawater [20]. It considers the composition of seawater, its spatial distribution, and the influence of the central material on the density of seawater, which will significantly advance the development of marine science and related interdisciplinary disciplines. The temperature sensor used in CTD is usually a platinum thermistor because of its high accuracy and broader range. The depth measurement is still obtained by converting the pressure measurement. Their advantages and disadvantages of pressure sensors based on piezoresistive, capacitive, and resonant technologies are compared in Table 2.| Pressure Sensors | Advantages | Disadvantages |
|---|---|---|
| Piezoresistive | simple structure, small size, high precision | low robustness |
| Capacitive | simple structure, high precision, high robustness | large non-linear error |
| Resonant | stable construction, high precision, high stability | complex manufacturing and high cost |
3.2. Turbidity
3.3. Dissolved Oxygen
Dissolved oxygen (DO) refers to the molecular state of oxygen dissolved in water [22]. It can get continuous replenishment mainly by the dissolution of oxygen from the air and the photosynthesis of plants in the water. If seawater is polluted by organic matter, oxygen in the water will be seriously consumed. Moreover, when dissolved oxygen is not timely replenished, anaerobic bacteria in the water will get rapid reproduction, which leads to the corruption of organic matter and makes the water body more polluted and smelly. Therefore, the amount of dissolved oxygen in water is an indicator of the self-purification ability of the water. The commonly used methods for measuring DO include the Winkler method, electrochemical method, and optical method [23][24]. Winkler’s method uses chemical reaction for measurement, which is highly accurate but cumbersome and cannot be measured in-situ. The electrochemical method is based on the current generated by the redox reaction at the electrode to determine the measurement, the measurement efficiency is high, but the reaction electrode is accessible to age, which needs regular maintenance and replacement [24]. The optical method overcomes these disadvantages and is more durable but also more expensive.
4. Underwater Inspections
4.1. Underwater Detection
Usually, cultural heritages and wrecks are well preserved in low oxygen conditions underwater. However, human activities, including fishing nets, marine geohazards, and seabed geological change, can lead to damages to these monuments [27][28]. In order to help archaeologists better investigate and protect historical sites, it is necessary to do the surveys more efficiently. Currently, commonly used underwater archaeological surveys include visual methods and sonar images, which are used for object detection. In addition, in maritime security, underwater object detection technology is also used to identify moving intruders and ocean mines. Due to the absorptive and scattering characteristic of seawater, there are many challenges for underwater imaging [29]. In addition, light can further attenuate due to the suspended particulate matter, and substances in water [30]. For the vision system, light needs to travel in three different media (water, viewports, air) as shown in Figure 31. Transparent viewport housing is often made from transparent glass or acrylic, made in a domed shape. As Figure 31 shows, the refraction provokes a pin-cushion distortion, which makes that the most significant reconstruction errors appear at the edges of the target [31]133][32]. Domed shape viewport housing is designed to eliminate the problem, as Figure 31 shows. Furthermore, an image processing algorithm is another way to calibrate the system.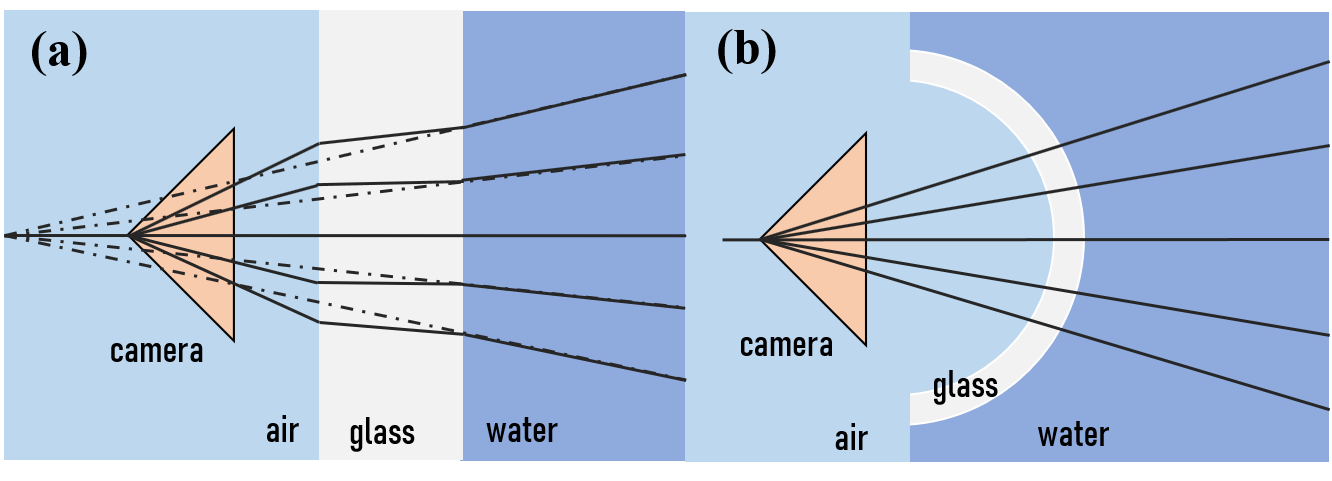
4.2. Track and Inspect
References
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The nippon foundation—GEBCO seabed 2030 project: The quest to see the world’s oceans completely mapped by 2030. Geosciences 2018, 8, 63.
- Menandro, P.S.; Bastos, A.C. Seabed mapping: A brief history from meaningful words. Geosciences 2020, 10, 273.
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor mapping—The challenge of a truly global ocean bathymetry. Front. Mar. Sci. 2019, 6, 283.
- Sandwell, D.T.; Harper, H.; Tozer, B.; Smith, W.H.F. Gravity field recovery from geodetic altimeter missions. Adv. Space Res. 2019, 68, 1059–1072.
- Jalal, F.; Nasir, F. Underwater navigation, localization and path planning for autonomous vehicles: A review. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 817–828.
- Lin, M.; Yang, C. Auv docking method in a confined reservoir with good visibility. J. Intell. Robot. Syst. 2020, 100, 349–361.
- Hwang, J.; Bose, N.; Fan, S. Auv adaptive sampling methods: A review. Appl. Sci. 2019, 9, 3145.
- Thomson, D. Acoustic positioning systems. In Proceedings of the OCEANS ’02 MTS/IEEE, Biloxi, MI, USA; Volume 3, pp. 1312–1318.
- Elliott, J.E.; Elliott, K.H. Tracking marine pollution. Science 2013, 340, 556–558.
- Willis, K.A.; Serra-Gonçalves, C.; Richardson, K.; Schuyler, Q.A.; Pedersen, H.; Anderson, K.; Stark, J.S.; Vince, J.; Hardesty, B.D.; Wilcox, C.; et al. Cleaner seas: Reducing marine pollution. Rev. Fish Biol. Fish. 2021, 1–16.
- Essential Ocean Variables. Available online: https://www.goosocean.org/index.php?option=com_content&view=article&id=283:essential-ocean-variables&catid=9&Itemid=441 (accessed on 27 October 2021).
- McDougall, T.J.; Jackett, D.R.; Millero, F.J. An algorithm for estimating absolute salinity in the global ocean. Ocean. Sci. Discuss. 2009, 6, 215.
- Hamon, B.V. A temperature-salinity-depth recorder. ICES J. Mar. Sci. 1955, 21, 72–73.
- Hamon, B.V.; Brown, N.L. A temperature-chlorinity-depth recorder for use at sea. J. Sci. Instruments 1958, 35, 452.
- Woody, C.; Shih, E.; Miller, J.; Royer, T.; Atkinson, L.P.; Moody, R.S. Measurements of salinity in the coastal ocean: A review of requirements and technologies. Mar. Technol. Soc. J. 2000, 34, 26–33.
- Perkin, R.; Lewis, E. The practical salinity scale 1978: Fitting the data. IEEE J. Ocean. Eng. 1980, 5, 9–16.
- Lewis, E.L.; Perkin, R.G. The practical salinity scale 1978: Conversion of existing data. Deep. Sea Res. Part A Oceanogr. Res. Pap. 1981, 28, 307–328.
- Unesco. Algorithms for Computation of Fundamental Properties of Seawater; Unesco: Paris, France, 1983.
- Thermodynamic Equation Of Seawater—2010 (TEOS-10). Available online: http://teos-10.org/ (accessed on 26 October 2021).
- Pawlowicz, R. What Every Oceanographer Needs to Know about Teos-10 (the Teos-10 Primer). 2010. Unpublished Manuscript. Available online: www.TEOS-10.org (accessed on 17 November 2021).
- ISO 7027-1:2016 Water Quality—Determination of Turbidity—Part 1: Quantitative Methods. Available online: https://www.iso.org/standard/62801.html (accessed on 5 September 2021).
- Hasumoto, H.; Imazu, T.; Miura, T.; Kogure, K. Use of an optical oxygen sensor to measure dissolved oxygen in seawater. J. Oceanogr. 2006, 62, 99–103.
- McDonagh, C.; Kolle, C.; McEvoy, A.K.; Dowling, D.L.; Cafolla, A.A.; Cullen, S.J.; MacCraith, B.D. Phase fluorometric dissolved oxygen sensor. Sensors Actuators B Chem. 2001, 74, 124–130.
- Sosna, M.; Denuault, G.; Pascal, R.W.; Prien, R.D.; Mowlem, M. Development of a reliable microelectrode dissolved oxygen sensor. Sens. Actuators B Chem. 2007, 123, 344–351.
- McNutt, M. The hunt for MH370. Science 2014, 344, 947.
- Mcleod, D.; Jacobson, J. Advances in autonomous deepwater inspection. Presented at the OTC Brasil, Rio de Janeiro, Brazil, 29–31 October 2013.
- Drap, P.; Seinturier, J.; Scaradozzi, D.; Gambogi, P.; Long, L.; Gauch, F. Photogrammetry for virtual exploration of underwater archeological sites. In Proceedings of the 21st International Symposium, CIPA, Athens, Greece, 1–6 October 2007.
- Stieglitz, T.C.; Waterson, P. Impact of cyclone yasi on the wreck of the ss yongala documented by comparative multibeam bathymetry analysis. Qld. Archaeol. Res. 2013, 16, 33–43.
- Castillón, M.; Palomer, A.; Forest, J.; Ridao, P. State of the art of underwater active optical 3d scanners. Sensors 2019, 19, 5161.
- Kocak, D.M.; Dalgleish, F.R.; Caimi, F.M.; Schechner, Y.Y. A focus on recent developments and trends in underwater imaging. Mar. Technol. Soc. J. 2008, 42, 52–67.
- Kwon, Y.-H. Object plane deformation due to refraction in two-dimensional underwater motion analysis. J. Appl. Biomech. 1999, 15, 396–403.
- Sedlazeck, A.; Koch, R. Perspective and non-perspective camera models in underwater imaging—Overview and error analysis. In Outdoor and Large-Scale Real-World Scene Analysis; Springer: Berlin/Heidelberg, Germany, 2012; pp. 212–242. Explorer Pro Bowtech. Available online: http://www.teledynemarine.com/explorer-pro?ProductLineID=121/ (accessed on 5 September 2021).
- Mai, C.; Pedersen, S.; Hansen, L.; Jepsen, K.L.; Yang, Z. Subsea infrastructure inspection: A review study. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 71–76. Sedlazeck, A.; Koch, R. Perspective and non-perspective camera models in underwater imaging—Overview and error analysis. In Outdoor and Large-Scale Real-World Scene Analysis; Springer: Berlin/Heidelberg, Germany, 2012; pp. 212–242.
- Submarine Cable Frequently Asked Questions. Available online: https://www2.telegeography.com/submarine-cable-faqs-frequently-asked-questions (accessed on 5 September 2021).Mai, C.; Pedersen, S.; Hansen, L.; Jepsen, K.L.; Yang, Z. Subsea infrastructure inspection: A review study. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 71–76.
- Reda, A.; Thiedeman, J.; Elgazzar, M.A.; Shahin, M.A.; Sultan, I.A.; McKee, K.K. Design of subsea cables/umbilicals for in-service abrasion-part 1: Case studies. Ocean. Eng. 2021, 2021, 108895. Submarine Cable Frequently Asked Questions. Available online: https://www2.telegeography.com/submarine-cable-faqs-frequently-asked-questions (accessed on 5 September 2021).
- Submarine Cables, the True Communication Highway. Available online: https://www.mapfreglobalrisks.com/gerencia-riesgos-seguros/article/submarine-cables-the-true-communication-highway/?lang=en (accessed on 5 September 2021).Reda, A.; Thiedeman, J.; Elgazzar, M.A.; Shahin, M.A.; Sultan, I.A.; McKee, K.K. Design of subsea cables/umbilicals for in-service abrasion-part 1: Case studies. Ocean. Eng. 2021, 2021, 108895.
- Jackson, L.A. Submarine Communication Cable Including Optical Fibres within an Electrically Conductive Tube, England. U.S. Patent US 4,278,835, 14 July 1981. Submarine Cables, the True Communication Highway. Available online: https://www.mapfreglobalrisks.com/gerencia-riesgos-seguros/article/submarine-cables-the-true-communication-highway/?lang=en (accessed on 5 September 2021).
- Jackson, L.A. Submarine Communication Cable Including Optical Fibres within an Electrically Conductive Tube, England. U.S. Patent US 4,278,835, 14 July 1981.