Unmanned aerial vehicle (UAV) routing is transitioning from an emerging topic to a growing research area as the 3D flexible utilization of airspace, promogulated by UAVs, is a potential game-changer in solving the urban air mobility challenge by allowing to reshape transportation and logistics in the future. This has revealed a need to classify different types of research and examine the general characteristics of the research area. This research aims to assist in identifying the main topics and emerging research streams and provides a published overview of the current state and contributions to the area of the UAV routing problem (UAVRP) and a general categorization of the vehicle routing problem (VRP) followed by a UAVRP classification with a graphical taxonomy based on the analysis of UAVRP current status. To achieve this, an analysis of the existing research contributions promulgated in this domain is conducted. This analysis is used to identify the current state of UAVRP and the gaps related to the UAVs’ flight dynamics and weather conditions, which significantly influence the fuel consumption of the UAV when modeling the UAVRP.
- unmanned aerial vehicles
- UAV routing and scheduling
- UAV routing
- vehicle routing problem
1. Introduction
2. UAV Routing with an Emphasis on the Problem Type, Transportation Mode, and Degree of Automation
The basis of all routing literature is the VRP, which is a well-studied field and still very much applicable for the advancement of new technology [12,13,14]. VRPs have been applied to solve delivery problems [15], which could appear similar to the UAV routing as a VRP attempts to find the optimal routes for one or more vehicles to deliver commodities to a set of locations [16]. We identify three main dimensions that seem particularly relevant to apply when addressing the UAVRP: 1. The problem type: When classifying routing literature, it can be segregated based on the problem type with an emphasis on the VRP, which has given the major research contributions in the domain of vehicle routing [15,17] and is used as an input for all the routing problems in general. 2. The transportation mode: Routing literature can be partitioned according to the categories of transportation mode, as the characteristics of the modes (such as land, sea, and air) affect the routing methods. Transportation modes have different characteristics in terms of cost, transit time, accessibility, and environmental performance [18]. Compared to other transportation modes, UAVs can be a competitive alternative for delivery and pickup of time-sensitive items, regardless of the ground-level road conditions [19]. 3. The degree of automation: The degree of automation in the transportation systems is a dimension as automated systems are discussed in dynamic vehicle routing [20,21], generalized vehicle routing [21], and real-time vehicle routing [22]. Technological advances in the area of UAV have been impressive, and this leads to an increased degree of automation of these systems [23]. In production systems, the majority of research has been focused on automated guided vehicles (AGVs) [24], mobile robot routing [25, 26,27,28,29,30,31,32,33,34], or six degrees of freedom aerial robots [34], which are UAVs.2.1. Different Types of Vehicle Routing Problems
3. UAVRP Current State
Limited contributions have been presented [67,68,69] in the area of UAV routing in 3D environments. What has been accomplished in the field has focused on UAV routing for transporting materials and surveillance [10] without considering the stochastic conditions in weather and non-linear fuel consumption models [9]. Table 1 shows the top seven subject areas in UAV routing literature, where the majority of contributions are seen in engineering and computer science domains.| Subject Area | No of Papers |
|---|---|
| Engineering | 173 |
| Computer Science | 83 |
| Mathematics | 41 |
| Physics and Astronomy | 25 |
| Author | Approach | Objective | Experimental Data |
|---|---|---|---|
| [81] Shetty, Sudit, and Nagi, 2008 | General VRP+ multi-vehicle TSP | Maximize the total weighted service to the targets from the homogeneous fleet of UAVs | TSPLIB (http://www.iwr.uni-heidelberg.de/groups/comopt/software) |
| [82] Xingyin Wang, Poikonen, and Golden, 2016 | VRP | Minimize the maximum duration of the routes (i.e., the completion time) | Have considered two problems which have the same set of customers, but different homogeneous fleets |
| [83] Sundar and Rathinam, 2014 | Single VRP | To find a path for the UAV such that each target is visited at least once by the vehicle, the fuel constraint is never violated along the path for the UAV, and the total fuel required by the UAV is a minimum | 50 instances of 10 targets to 25 targets with increments in steps of 5 in each problem size and all the targets are chosen randomly from a square area of 5000 × 5000 units |
| [84 | |||
| Social Sciences | 24 |
- Multiple Depot (MDVRP) VRP: The vendor uses many depots to supply the customers [
- 40]. MDVRP is important when using UAVs with multiple depots to transport materials to customers.
-
VRP with Pick-Up and Delivering (VRPPD): Customers may return some goods to the depot [14,39]. VRPPD is important when using UAVs with multiple pick up and deliveries of goods.
-
Split Delivery VRP (SDVRP): Customers may be served by more than one vehicle [41]. SDVRP is important when using UAVs to delivering goods to customers where one vehicle can visit many customers and one customer can be visited by many UAVs.
-
Stochastic VRP (SVRP): Some parameters (like the number of customers, their demands, serve time, or travel time) are random [42,43]. SVRP is important when using UAVs in delivering goods to satisfy stochastic demands.
-
Time-dependent VRP with path flexibility (TDVRP-PF): Any arc between two customer nodes has multiple corresponding paths in the road network [44].
-
VRP with trailers and transshipments (VRPTT): In addition to depot and customer locations, this introduces transshipment locations [45]. VRPTT is important when using UAVs along with a fleet of trucks in delivering goods and in last-mile deliveries.
-
VRP with profits: A profit is associated with each customer that makes such a customer more or less attractive. Unlike to the most classical VRPs, in VRP with profits, the set of customers to serve is not given and different decisions have to be taken on which customers to serve and how to cluster the customers to be served in different routes and order the visits in each route [46,47].
2.2. Based on Modes of Transport
2.2.1. Land-Based Transportation Modes (Vehicle Routing)
2.2.2. Maritime-Based Transportation (Vessel Routing)
2.3. Degree of Automation
This paper also considers the degree of automation of transportation as automation and autonomy play a large role in practical applications of the UAVRP [54,55,56]. Furthermore, they play an increasing role in various modes of transport. Driverless trains are already in operation; the degree of automation in cars is continuously rising, and even the air transport sector is discussing the use of pilotless aircraft [56]. It is observed that certain modes of transportation are fully automated and certain modes are semi-automated [56,57]. Automated guided transport (AGT) systems and AGVs fall under the fully automated modes of transportation and have been subjected to intense study in literature [24,25,27,58,59,60,61,62]. In maritime transport, automated vessel routing has been introduced and unmanned vessels will be the future of maritime transportation [62]. As UAVs flight and navigation tasks are increasingly automated to gain economies-of-scale and speed of operations and support the large-scale operations, UAV routing and execution are evolving from teams of operators managing a single UAV to a single operator managing multiple UAVs as illustrated in Figure 1. The increasing degree of autonomy and automation has created a continuous push for developing methods for managing complex UAV operations. Such systems will naturally require the development of advanced prediction, routing, and scheduling methods and implementation of various systems to support decision-makers in handling the complexity of operations [10,11,12,13]. It is also worth noting that most contributions focus on the VRP characteristics, specific or multimodal transportation modes, and to some degree, on the VRP for automated land-based transportation (typically indoor robotic solutions such as AGVs, mobile robots). While the classical VRP is well-studied, the methods and approaches found within this domain are still very much applicable for the advancement of new technology in the area of UAV operations [12].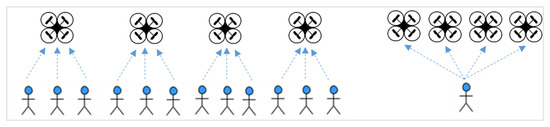
2.4. Significance of UAVRP
| Materials Science | |
| 18 | |
| Decision Sciences | 14 |
4. Approaches and Domains in UAV Routing in Existing Literature
| ] David W. Casbeer, 2011 | |||
| VRP with Precedence Constraints | |||
| Minimize the total distance traveled by a homogeneous fleet of UAVs | Five UAVs and ten targets placed randomly in the area of responsibility | ||
| [85] Karaman and Frazzoli, 2008 | VRPTL-VRP with Temporal Logic Specifications | Minimize the relative risk for using a homogeneous fleet of UAVs in the mission. | A scenario with three UAVs, one launch site, two landing sites, and five targets |
| [86] Klein et al., 2013 | Dynamic VRP | Minimize the time required to determine the location of the source | Have conducted a pair of flight tests where they deploy 6 sensors over a 1 km2 region and localize acoustic sources within the area |
| [87] Arsie and Frazzoli, 2008 | Dynamic VRP | Minimize the expected time between the appearance of a target point and the time it is visited by one of the agents | - |
| [88] Murray and Chu, 2015 | VRP+ Flying Sidekick TSP | Minimize the latest time at which either the truck or the UAV returns to the depot | 10 or 20 customers, such that 80%–90% of customers are UAV-eligible according to weight, while the truck and UAV speeds were fixed at 25 miles/h, with the UAV having a flight endurance of 30 min |
| [89] Kinney, Hill, and Moore, 2005 | VRP with Pick-Up and Delivering (VRPPD) + TSP | To find the shortest tour visiting all of the customers | 56 test problems comprising the standard test set of Solomon were used in the testing |
| [74] Guerrero and Bestaoui, 2013 | TSP+ Capacitated VRP (CVRP) | Minimizes the sum of travel time among waypoints | Have considered three 2D and two 3D example scenarios with different waypoints and home waypoints |
| [90] Wen, Zhang, and Wong, 2016 | Capacitated VRP (CVRP) | Minimize the total travel time and fleet size of the homogeneous fleet of UAVs | Have considered nine instances according to different proportions between hot water and blood |
| [75] Savuran and Karakaya, 2016 | Capacitated Mobile Depot VRP (C-MoDVRP) | Maximize the total number of targets visited by the UAV | The simulation tests are conducted using 16 of bench-mark problems from Heidelberg TSP Library (of Heidelberg 1995) |
| [91] Murray and Karwan, 2013 | VRP with Time windows (VRPTW) | Maximize the overall effectiveness of the mission, minimize changes to the initial mission plan, minimize total travel time, and minimize the use of resources, payloads, and “dummy” bases | Test problems are created for a combination of different initial tasks, resources, pop-ups, time window scales, loiter times, and payloads for a battlespace area of size (∼unif(50,400)) × (∼unif(50,400)) |
| [92] Lamont, Slear, and Melendez, 2007 | VRP with Time Windows (VRPTW) | Minimizing cost and risk generally associated with a three-dimensional VRP | Three-element target packages are created along with a grid of real-world terrain and a realistic threat lay down |
| [67] Guerriero, Surace, Loscri, and Natalizio, 2014 | VRP with Soft Time Windows (VRP-STW) | Minimize the total distances traveled by the homogeneous fleet of UAVs, maximize the customer satisfaction and minimize the number of used UAVs | Fleet of 6 homogeneous UAVs in a field of 110 × 80 m2 with different parameters for a sport event |
| [19] Kim, Lim, Cho, and Côté, 2017 | Multi-Depot VRP (MDVRP) | Minimizing the operating cost of a heterogeneous fleet of UAVs and to find the optimal number of UAV center locations | Have considered 9 candidate sites for centers and 40 patients to be served by two types of UAVs |
| [93] Habib, Jamal, and Khan, 2013 | Multiple-Depot VRP (MDVRP) | Minimize the total distances traveled by a homogeneous fleet of UAVs | Have considered 12 instances with different combinations of fleet size and targets (Max fleet size of 5 homogeneous fleets of UAVs and max targets of 101) |
| Area/Approach | No of Papers |
|---|---|
| Wireless networks | 24 |
| Scheduling | 8 |
| VRP | 18 |
| TSP | 9 |
| Other | 13 |
| Author |
|---|
| Approach | Objective | Experimental Data | |
|---|---|---|---|
| [94] Oberlin, Rathinam, and Darbha, 2009 | Heterogeneous, Multiple Depot, Multiple TSP (HMDMTSP) | Minimize the total cost of traveling for the heterogeneous fleet of UAVs | 6 UAVs with a minimum turning radius vary uniformly from 100 to 200 meters and uniformly generated targets [4,40] in a square of area 5 × 5 km2 |
| [77] Liu, Gao, Guang, and Song, 2013 | TSP | Minimize the total traveling time for the homogeneous fleet of UAVs | 6 UAV having cruise speed 100 km/h and maximum distance 200 km |
| [95] Babel, 2016 | The curvature-constrained TSP with obstacles | Minimize the total tour length | One aerial vehicle with a cruise speed of 100 m/s covering an operational area of size 20 km × 20 km |
| [96] Manyam et al., 2016 | Asymmetric TSP | Minimize the total traveling time for homogeneous fleet of UAVs | 2 UAVs in a zone of size 30 × 30 units where targets are located randomly and 50 instances for each problem size with 10–40 targets |
| [97] Furini, Persiani, and Toth, 2016 | Time-Dependent TSP in Controlled Airspace (TDTSPPCA) | Minimize the total traveling time and the holding time over mission waypoints for homogeneous fleet of UAVs | 5 scenarios 10–40 mission waypoints, randomly selected among the navigation points located within a circle having center in Milano Linate and ray of 80 NM |
| [98] Enright and Frazzoli, 2005 | Dynamic Traveling Repairperson Problem (DTRP) | Minimize the expected waiting time between the appearance of a target, and the time it is visited | Simulated with a Single UAV with randomly generated targets |
| [71] Ryan, Bailey, and Moore, 2013 | Multi-vehicle TSP | Maximize the expected target coverage | 21-day simulation of the Sisson’s (1997) [100] notional Nari dataset |
5. Challenges in UAV Routing
3.1. Weather Conditions
3.2. Air Traffic Control
3.3. Fuel Consumption and Range
4. Conclusions
References
- Amila Thibbotuwawa; Grzegorz Bocewicz; P. Nielsen; Z. Banaszak; UAV Mission Planning Subject to Weather Forecast Constraints. Advances in Intelligent Systems and Computing 2019, 1004, 65-76, 10.1007/978-3-030-23946-6_8.
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Planning deliveries with UAV routing under weather forecast and energy consumption constraints. IFAC-PapersOnLine 2019, 52, 820–825. [Google Scholar] [CrossRef]
- Khosiawan, Y.; Nielsen, I. A system of UAV application in indoor environment. Prod. Manuf. Res. 2016, 4, 2–22. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Zhang, M.; Su, C.; Liu, Y.; Hu, M.; Zhu, Y. Unmanned Aerial Vehicle Route Planning in the Presence of a Threat Environment Based on a Virtual Globe Platform. ISPRS Int. J. Geo-Inf. 2016, 5, 184. [Google Scholar] [CrossRef]
- Xiang, J.; Liu, Y.; Luo, Z. Flight safety measurements of UAVs in congested airspace. Chin. J. Aeronaut. 2016, 29, 1355–1366. [Google Scholar] [CrossRef]
- Klippstein, H.; Diaz De Cerio Sanchez, A.; Hassanin, H.; Zweiri, Y.; Seneviratne, L. Fused Deposition Modeling for Unmanned Aerial Vehicles (UAVs): A Review. Adv. Eng. Mater. 2017, 20, 1700552. [Google Scholar] [CrossRef]
- Popper, B. Drones could make Amazon’s dream of free delivery profitable—The Verge. 2016. Available online: http://www.theverge.com/33 (accessed on 11 April 2017).
- Radzki, G.; Thibbotuwawa, A.; Bocewicz, G. UAVs flight routes optimization in changing weather conditions—Constraint programming approach. Appl. Comput. Sci. 2019, 15, 5–17. [Google Scholar] [CrossRef]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. A Declarative Modelling Framework for Routing of Multiple UAVs in a System with Mobile Battery Swapping Stations. In International Conference on Intelligent Systems in Production Engineering and Maintenance; Springer: Berlin, Germany, 2019; pp. 429–441. [Google Scholar] [CrossRef]
- Aasen, H.; Gnyp, M.L. Spectral comparison of low-weight and UAV- based hyperspectral frame cameras with portable spectroradiometers measurements. In Proceedings of the Work UAV-Based Remote Sensing Methods for Monitoring Vegetation, Cologne, Germany, 9–10 September 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Chandran, B.; Raghavan, S. Modeling and Solving the Capacitated Vehicle Routing Problem on Trees. In Mathematics of Neural Networks; Springer Science and Business Media LLC: Berlin, Germany, 2008; Volume 43, pp. 239–261. [Google Scholar]
- Thibbotuwawa, A. Unmanned Aerial Vehicle Fleet Mission Planning Subject to Changing Weather Conditions. Ph.D. Thesis, Og Naturvidenskabelige Fakultet, Aalborg Universitet, Aalborg, Denmark, 2020. [Google Scholar]
- Sung, I.; Nielsen, P. Zoning a Service Area of Unmanned Aerial Vehicles for Package Delivery Services. J. Intell. Robot. Syst. 2019, 97, 719–731. [Google Scholar] [CrossRef]
- Ekşioglu, B.; Vural, A.V.; Reisman, A. The vehicle routing problem: A taxonomic review. Comput. Ind. Eng. 2009, 57, 1472–1483. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Toro, E.M.; Escobar, A.H.; Granada, E.M. Literature Review on the Vehicle Routing Problem in the Green Transportation Context. Luna Azul 2015, 362–387. [Google Scholar] [CrossRef]
- Kim, S.J.; Lim, G.J.; Cho, J.; Côté, M.J. Drone-Aided Healthcare Services for Patients with Chronic Diseases in Rural Areas. J. Intell. Robot. Syst. 2017, 88, 163–180. [Google Scholar] [CrossRef]
- Psaraftis, H.N. Dynamic vehicle routing: Status and prospects. Ann. Oper. Res. 1995, 61, 143–164. [Google Scholar] [CrossRef]
- Baldacci, R.; Bartolini, E.; Laporte, G. Some applications of the generalized vehicle routing problem. J. Oper. Res. Soc. 2010, 61, 1072–1077. [Google Scholar] [CrossRef]
- Ghiani, G.; Guerriero, F.; Laporte, G.; Musmanno, R. Real-time vehicle routing: Solution concepts, algorithms and parallel computing strategies. Eur. J. Oper. Res. 2003, 151, 1–11. [Google Scholar] [CrossRef]
- Le Ny, J.; Dahleh, M.; Feron, E. Multi-UAV dynamic routing with partial observations using restless bandit allocation indices. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; Institute of Electrical and Electronics Engineers (IEEE): Los Alamitos, CA, USA, 2008; pp. 4220–4225. [Google Scholar] [CrossRef]
- Kłosowski, G.; Gola, A.; Amila, T. Computational intelligence in control of AGV multimodal systems. Ifac-Papersonline 2018, 51(11), 1421–1427. [Google Scholar] [CrossRef]
- Dang, Q.-V.; Nielsen, I.; Steger-Jensen, K.; Madsen, O. Scheduling a single mobile robot for part-feeding tasks of production lines. J. Intell. Manuf. 2013, 25, 1271–1287. [Google Scholar] [CrossRef]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Routing and Scheduling of Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In Proceedings of the 15th International Conference Distributed Computing and Artificial Intelligence, Toledo, Spain, 20–22 June 2018; pp. 75–86. [Google Scholar] [CrossRef]
- Nielsen, I.; Dang, Q.-V.; Bocewicz, G.; Banaszak, Z. A methodology for implementation of mobile robot in adaptive manufacturing environments. J. Intell. Manuf. 2015, 28, 1171–1188. [Google Scholar] [CrossRef]
- Dang, Q.-V.; Nielsen, I. Simultaneous scheduling of machines and mobile robots. e-Bus. Telecommun. Netw. 2013, 365, 118–128. [Google Scholar] [CrossRef]
- Zou, B.; Gong, Y.; Xu, X.; Yuan, Z. Assignment rules in robotic mobile fulfilment systems for online retailers. Int. J. Prod. Res. 2017, 55, 6175–6192. [Google Scholar] [CrossRef]
- Mann, M.; Zion, B.; Shmulevich, I.; Rubinstein, D. Determination of robotic melon harvesting efficiency: A probabilistic approach. Int. J. Prod. Res. 2015, 54, 3216–3228. [Google Scholar] [CrossRef]
- Djordjevich, A.; Tso, S.; Zhang, J. Extended range tactility in material handling. Int. J. Prod. Res. 2000, 38, 4357–4367. [Google Scholar] [CrossRef]
- Logendran, R.; Sriskandarajah, C. Sequencing of robot activities and parts in two-machine robotic cells. Int. J. Prod. Res. 1996, 34, 3447–3463. [Google Scholar] [CrossRef]
- Rembold, B.; Nof, S.Y. Modelling the performance of a mobile robot with RTM. Int. J. Prod. Res. 1991, 29, 967–978. [Google Scholar] [CrossRef]
- Franceschini, F.; Mastrogiacomo, L.; Pralio, B. An unmanned aerial vehicle-based system for large scale metrology applications. Int. J. Prod. Res. 2010, 48, 3867–3888. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The Vehicle Routing Problem; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2002. [Google Scholar] [CrossRef]
- Sonmezocak, E.; Kurt, S. Optimum Route Planning and Scheduling for Unmanned Aerial Vehicles; Navel Postgraduate School: Monterey, CA, USA, 2010. [Google Scholar]
- Toth, P.; Tramontani, A. An Integer Linear Programming Local Search for Capacitated Vehicle Routing Problems. In The Vehicle Routing Problem: Latest Advances and New Challenges; Springer: Boston, MA, USA, 2008; pp. 275–295. [Google Scholar]
- Toth, P.; Vigo, D. Models, relaxations and exact approaches for the capacitated vehicle routing problem. Discret. Appl. Math. 2002, 123, 487–512. [Google Scholar] [CrossRef]
- Pisinger, D.; Ropke, S. A general heuristic for vehicle routing problems. Comput. Oper. Res. 2007, 34, 2403–2435. [Google Scholar] [CrossRef]
- Montoya-Torres, J.R.; Franco, J.L.; Isaza, S.N.; Jiménez, H.F.; Herazo-Padilla, N. A literature review on the vehicle routing problem with multiple depots. Comput. Ind. Eng. 2015, 79, 115–129. [Google Scholar] [CrossRef]
- Archetti, C.; Speranza, M.G. The Split Delivery Vehicle Routing Problem: A Survey. In The Vehicle Routing Problem: LATEST Advances and New Challenges; Springer: Boston, MA, USA, 2008; Volume 43, pp. 103–122. [Google Scholar]
- Gendreau, M.; Laporte, G.; Séguin, R. Stochastic vehicle routing. Eur. J. Oper. Res. 1996, 88, 3–12. [Google Scholar] [CrossRef]
- Pillac, V.; Gendreau, M.; Guéret, C.; Medaglia, A.L. A review of dynamic vehicle routing problems. Eur. J. Oper. Res. 2013, 225, 1–11. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, L.; Van Woensel, T.; Gross, J.-P. Time-dependent vehicle routing problem with path flexibility. Transp. Res. Part B Methodol. 2017, 95, 169–195. [Google Scholar] [CrossRef]
- Drexl, M. A Generic Heuristic for Vehicle Routing Problems with Multiple Synchronization Constraints; Gutenberg School of Management and Economics–Discussion Paper Series: Mainz, Germany, 2014; Volume 1412, p. 43. [Google Scholar] [CrossRef]
- Stavropoulou, F.; Repoussis, P.; Tarantilis, C. The vehicle routing problem with profits and consistency constraints. Eur. J. Oper. Res. 2019, 274, 340–356. [Google Scholar] [CrossRef]
- Archetti, C.; Speranza, M.G.; Vigo, D. Vehicle routing problems with profits. In Vehicle Routing: Problems, Methods, and Applications, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2014; pp. 273–297. [Google Scholar]
- Ibarra-Rojas, O.J.; Delgado, F.; Giesen, R.; Muñoz, J.C. Planning, operation, and control of bus transport systems: A literature review. Transp. Res. Part B Methodol. 2015, 77, 38–75. [Google Scholar] [CrossRef]
- Kontovas, C.A. The Green Ship Routing and Scheduling Problem (GSRSP): A conceptual approach. Transp. Res. Part D Transp. Environ. 2014, 31, 61–69. [Google Scholar] [CrossRef]
- Wang, X. Operational Transportation Planning of Modern Freight Forwarding Companies: Vehicle Routing under Consideration of Subcontracting and Request Exchange; Springer Nature: Basel, Switzerland, 2015; pp. 1–161. [Google Scholar] [CrossRef]
- Hoff, A.; Andersson, H.; Christiansen, M.; Hasle, G.; Lokketangen, A. Industrial aspects and literature survey: Fleet composition and routing. Comput. Oper. Res. 2010, 37, 2041–2061. [Google Scholar] [CrossRef]
- Kjeldsen, K.H.; Ergun, O.; Lysgaard, J.; Erera, A. Rescheduling ships and cargo in liner shipping in the event of disruptions. Liner Shipp 2011, 105–133. [Google Scholar]
- Campbell, J.F.; O’Kelly, M.E. Twenty-Five Years of Hub Location Research. Transp. Sci. 2012, 46, 153–169. [Google Scholar] [CrossRef]
- Holden, J.; Goel, N. Fast-Forwarding to A Future of On-Demand Urban Air Transportation; Uber Elevate: San Francisco, CA, USA, 2016; Available online: https://www.uber.com/info/elevate (accessed on 14 April 2018).
- Esa, J.; Poikonen, E.; Hyvönen, M. Remote and Autonomous Ships: The Next Steps; AAWA Position Paper; Rolls Royce plc: London, UK, 2016. [Google Scholar]
- Zheng, F.; Wang, F.; Wu, J.; Zheng, X. A methodology of UAV route planning for fast image mosaicking. In Proceedings of the 2015 23rd International Conference on Geoinformatics, Wuhan, China, 19–21 June 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Drones: High-Profile and Niche. Deloitte Touche Tohmatsu Ltd, London, UK. Available online: https://www2.deloitte.com/content/dam/Deloitte/global/Documents (accessed on 11 May 2019).
- Confessore, G.; Fabiano, M.; Liotta, G. A network flow based heuristic approach for optimising AGV movements. J. Intell. Manuf. 2011, 24, 405–419. [Google Scholar] [CrossRef]
- Ulusoy, G.; Bilge, Ü. Simultaneous scheduling of machines and automated guided vehicles. Int. J. Prod. Res. 1993, 31, 2857–2873. [Google Scholar] [CrossRef]
- Oboth, C.; Batta, R.; Karwan, M. Dynamic conflict-free routing of automated guided vehicles. Int. J. Prod. Res. 1999, 37, 2003–2030. [Google Scholar] [CrossRef]
- Qiu, L.; Hsu, W.-J.; Huang, S.Y.; Wang, H. Scheduling and routing algorithms for AGVs: A survey. Int. J. Prod. Res. 2002, 40, 745–760. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Coelho, B.N.; Coelho, V.N.; Coelho, I.M. A multi-objective green UAV routing problem. Comput. Oper. Res. 2017, 88, 306–315. [Google Scholar] [CrossRef]
- Enright, J.J.; Frazzoli, E.; Pavone, M.; Ketan, S. Selection of Appropriate Class UAS/Sensors to Support Fire Monitoring: Experiences in the United States; Handbook of UAVs; Springer Nature: Basel, Switzerland, 2015. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2009, 57, 65. [Google Scholar] [CrossRef]
- Karpenko, S.; Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. UAV Control on the Basis of 3D Landmark Bearing-Only Observations. Sensors 2015, 15, 29802–29820. [Google Scholar] [CrossRef]
- Guerriero, F.; Surace, R.; Loscrí, V.; Natalizio, E. A multi-objective approach for unmanned aerial vehicle routing problem with soft time windows constraints. Appl. Math. Model. 2014, 38, 839–852. [Google Scholar] [CrossRef]
- Sundar, K.; Venkatachalam, S.; Rathinam, S. An Exact Algorithm for a Fuel-Constrained Autonomous Vehicle Path Planning Problem. arXiv Preprint 2016, arXiv:1604.08464. [Google Scholar]
- Rojas-Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2020. [Google Scholar] [CrossRef]
- Perera, H.N.; Hurley, J.; Fahimnia, B.; Reisi, M. The human factor in supply chain forecasting: A systematic review. Eur. J. Oper. Res. 2019, 274, 574–600. [Google Scholar] [CrossRef]
- Ryan, J.L.; Bailey, T.G.; Moore, J.T.; Carlton, W.B. Reactive tabu search in unmanned aerial reconnaissance simulations. J. Chem. Inf. Model. 2013, 53, 1689–1699. [Google Scholar] [CrossRef]
- Buck, K.; Gassner, R.; Poore, A.B.; Yan, X. Visibility Constrained Routing of Unmanned Aerial Vehicles. Signal Processing, Sensor Fusion, and Target Recognition. Int. Soc. Opt. Photonics 1999, 3720, 256–266. [Google Scholar] [CrossRef]
- Laporte, G. The Vehicle Routing Problem: An overview of exact and approximate algorithms. Eur. J. Oper. Res. 1992, 59, 231–247. [Google Scholar] [CrossRef]
- Guerrero, J.A.; Bestaoui, Y. UAV path planning for structure inspection in windy environments. J. Intell. Robot Syst. 2012, 69, 297–311. [Google Scholar] [CrossRef]
- Savuran, H.; Karakaya, M. Efficient route planning for an unmanned air vehicle deployed on a moving carrier. Soft Comput. 2015, 20, 2905–2920. [Google Scholar] [CrossRef]
- Lawler, E.L. The Traveling Salesman Problem: A Guided Tour of Combinatorial Optimization; Wiley-Interscience Series in Discrete Mathematics: Hoboken, NJ, USA, 1985. [Google Scholar]
- Liu, X.; Gao, L.; Guang, Z.; Song, Y. A UAV Allocation Method for Traffic Surveillance in Sparse Road Network. J. Highw. Transp. Res. Dev. 2013, 7, 81–87. [Google Scholar] [CrossRef]
- Geyer, C.; Dey, D.; Singh, S. Prototype Sense-and-Avoid Sstemy for UAVs; Report 2009 Tech. Report, CMU-RI-TR-09-09; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Fu, Y. New Development on Sense and Avoid Strategies for Unmanned Aerial Vehicles. Master’s Thesis, Concordia University, Montréal, QC, Canada, 2016. [Google Scholar]
- Imanberdiyev, N.; Fu, C.; Kayacan, E.; Chen, I.M. Autonomous navigation of UAV by using real-time model-based reinforcement learning. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Shetty, V.K.; Sudit, M.; Nagi, R. Priority-based assignment and routing of a fleet of unmanned combat aerial vehicles. Comput. Oper. Res. 2008, 35, 1813–1828. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: Several worst-case results. Optim. Lett. 2016, 11, 679–697. [Google Scholar] [CrossRef]
- Sundar, K.; Rathinam, S. Algorithms for routing an unmanned aerial vehicle in the presence of refueling depots. IEEE Trans. Autom. Sci. Eng. 2013, 11, 287–294. [Google Scholar] [CrossRef]
- David, W.; Casbeer, R.H.C. Column generation for a UAV assignment problemwith precedence constraints David. Int. J. Robust Nonlinear Control 2011, 21, 1421–1433. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Vehicle Routing Problem with Metric Temporal Logic Specifications. In Proceedings of the IEEE Conf Decis Control, San Diego, CA, USA, 13–15 December 2006; pp. 3953–3958. [Google Scholar] [CrossRef]
- Klein, D.J.; Venkateswaran, S.; Isaacs, J.T. Localization with sparse acoustic sensor network using UAVs as information-seeking data mules. ACM Trans. Sens. Netw. 2013, 9, 1–29. [Google Scholar] [CrossRef]
- Arsie, A.; Frazzoli, E. Efficient routing of multiple vehicles with no explicit communications. Int. J. Robust Nonlinear Control 2007, 18, 154–164. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Kinney, G.W.; Hill, R.R.; Moore, J.T. Devising a quick-running heuristic for an unmanned aerial vehicle (UAV) routing system. J. Oper. Res. Soc. 2005, 56, 776–786. [Google Scholar] [CrossRef]
- Wen, T.; Zhang, Z.; Wong, K.K.L. Multi-objective algorithm for blood supply via unmanned aerial vehicles to the wounded in an emergency situation. PLoS ONE 2016, 11, e0155176. [Google Scholar] [CrossRef] [PubMed]
- Murray, C.; Karwan, M. A Branch-and-Bound-Based Solution Approach for Dynamic Rerouting of Airborne Platforms. Nav. Res. Logist. 2013, 60, 141–159. [Google Scholar] [CrossRef]
- Lamont, G.B.; Slear, J.N.; Melendez, K. UAV swarm mission planning and routing using multi-objective evolutionary algorithms. In Proceedings of the 2007 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-Making, Honolulu, HI, USA, 1–5 April 2007; pp. 10–20. [Google Scholar] [CrossRef]
- Habib, D.; Jamal, H.; Khan, S.A. Employing multiple unmanned aerial vehicles for co-operative path planning. Int. J. Adv. Robot. Syst. 2013, 10(5), 235. [Google Scholar] [CrossRef]
- Oberlin, P.; Rathinam, S.; Darbha, S. A Transformation for a Heterogenous, Multiple Depot, Multiple Traveling Salesman Problem. Transformation 2003, 1292–1297. [Google Scholar] [CrossRef]
- Babel, L. Curvature-constrained traveling salesman tours for aerial surveillance in scenarios with obstacles. Eur. J. Oper. Res. 2017, 262, 335–346. [Google Scholar] [CrossRef]
- Manyam, S.G.; Rathinam, S.; Darbha, S. GPS Denied UAV Routing with Communication Constraints. J. Intell. Robot Syst. 2016, 84, 691–703. [Google Scholar] [CrossRef]
- Furini, F.; Persiani, C.A.; Toth, P. The Time Dependent Traveling Salesman Planning Problem in Controlled Airspace. Transp. Res. Part B Methodol. 2016, 90, 38–55. [Google Scholar] [CrossRef]
- Enright, J.J.; Frazzoli, E. UAV Routing in a Stochastic, Time-Varying Environment. IFAC Proc. 2005, 38, 295–300. [Google Scholar] [CrossRef]
- Sisson, M.R. Applying Tabu Heuristic to Wind Influenced, Minimum Risk and Maximum Expected Coverage Routes. Air Force Inst of Tech Wright-Patterson of School of Engineering. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson AFB, OH, USA, 1997. [Google Scholar]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks. J. Intell. Robot. Syst. 2013, 74, 437–453. [Google Scholar] [CrossRef]
- Antonio, P.; Grimaccia, F.; Mussetta, M. Architecture and methods for innovative heterogeneous wireless sensor network applications. Remote. Sens. 2012, 4, 1146–1161. [Google Scholar] [CrossRef]
- Mascarenas, D.; Flynn, E.; Farrar, C. A mobile host approach for wireless powering and interrogation of structural health monitoring sensor networks. IEEE Sens. J. 2009, 9, 1719–1726. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-Based Data Gathering Framework in UAV-Assisted Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking models in flying Ad-hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. 2013, 74, 513–527. [Google Scholar] [CrossRef]
- Rosati, S.; Kruzelecki, K.; Heitz, G. Dynamic Routing for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2015, 65, 1690–1700. [Google Scholar] [CrossRef]
- Guo, Y.; Li, X.; Yousefi’zadeh, H.; Jafarkhani, H. UAV-aided cross-layer routing for MANETs. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 2928–2933. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Mobile networking with UAVs: Opportunities and challenges. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; Institute of Electrical and Electronics Engineers (IEEE): Los Alamitos, CA, USA, 2013; pp. 933–941. [Google Scholar] [CrossRef]
- Maxa, J.-A.; Ben Mahmoud, M.S.; Larrieu, N. Secure routing protocol design for UAV Ad hoc NETworks. In Proceedings of the IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015; pp. 4A5-1–4A5-15. [Google Scholar] [CrossRef]
- Zhang, K.E.; Zhang, W.; Zeng, J.Z. Preliminary study of routing and date integrity in mobile Ad Hoc uav network. In Proceedings of the 2008 Int Conf Apperceiving Comput Intell Anal ICACIA, Boston, MA, USA, 7–11 July 2008; pp. 347–350. [Google Scholar] [CrossRef]
- Huang, X.; Wang, G.; Hu, F.; Kumar, S. Stability-Capacity-Adaptive Routing for High Mobility, Multi-Hop Cognitive Radio Networks. Communic Res. 2011, 60, 1–17. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Li, Y.; Shirani, R.; St-Hilaire, M.; Kunz, T. Improving routing in networks of Unmanned Aerial Vehicles: Reactive-Greedy-Reactive. Wirel. Commun. Mob. Comput. 2012. [Google Scholar] [CrossRef]
- Alshabtat, A.; Dong, L.; Li, J.; Yang, F. Low latency routing algorithm for unmanned aerial vehicles ad-hoc networks. Electr. Comput. Eng. 2010, 6, 48–54. [Google Scholar]
- Shi, N.; Luo, X. A Novel Cluster-Based Location-Aided Routing Protocol for UAV Fleet Networks. Int. J. Digit. Content Technol. Its Appl. 2012, 6, 376–383. [Google Scholar] [CrossRef]
- Zhang, J.; Jia, L.; Niu, S. A space-time network-based modeling framework for dynamic unmanned aerial vehicle routing in traffic incident monitoring applications. Sensors 2015, 15, 13874–13898. [Google Scholar] [CrossRef]
- Casas, I.; Malik, A.; Delmelle, E.M. An automated network generation procedure for routing of Unmanned Aerial Vehicles (UAVs) in a GIS environment. Netw. Spat. Econ. 2006, 7, 153–176. [Google Scholar] [CrossRef]
- Gu, D.L.; Gerla, M.; Ly, H.; Xu, K.; Kong, J.; Hong, X. Design of multilevel heterogeneous ad-hoc wireless networks with UAVs. Wirel. Mob. Commun. 2001, 4586, 327–338. [Google Scholar] [CrossRef]
- Brown, T.X.; Argrow, B.; Dixon, C. Ad Hoc UAV-Ground Network, Test Bed. Test 2004, 1, 1–5. [Google Scholar]
- Xu, K.X.K.; Hong, X.H.X.; Gerla, M.G.M. Landmark routing in large wireless battlefield networks using UAVs. In Proceedings of the Proceedings Communications for Network-Centric Operations: Creating the Information (MILCOM), McLean, VA, USA, 28–31 October 2001; pp. 230–234. [Google Scholar] [CrossRef]
- Gu, D.; Pei, G.; Ly, H. Hierarchical routing for multi-layer ad-hoc wireless networks with UAVs. MILCOM 2000, 310–314. [Google Scholar] [CrossRef]
- Ahner, D.K.; Buss, A.H.; Ruck, J.; Ave, S. A discrete event simulation with optimization in the loop approach to solving. In Proceedings of the Winter Simulation Conference (WSC), Monterey, CA, USA, 3–6 December 2006; pp. 1349–1356. [Google Scholar]
- Weinstein, A.L.; Schumacher, C. UAV scheduling via the vehicle routing problem with time windows. In Proceedings of the AIAA Infotech Aerospace Conference and Exhibit, Rohnert Park, CA, USA, 7–10 May 2007. [Google Scholar] [CrossRef]
- Kim, Y.; Gu, D.W.; Postlethwaite, I. Real-time optimal mission scheduling and flight path selection. IEEE Trans. Autom. Control. 2007, 52, 1119–1123. [Google Scholar] [CrossRef]
- Kim, J.; Song, B.D.; Morrison, J.R. On the scheduling of systems of UAVs and fuel service stations for long-term mission fulfillment. J. Intell. Robot. Syst. 2012, 70, 347–359. [Google Scholar] [CrossRef]
- Kwon, J.; Hailes, S. Scheduling UAVs to bridge communications in delay-tolerant networks using real-time scheduling analysis techniques. In Proceedings of the IEEE/SICE International Symposium on System Integration, Tokyo, Japan, 13–14 December 2014; pp. 363–369. [Google Scholar] [CrossRef]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Deployment of Battery Swapping Stations for Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In Biomedical Engineering Systems and Technologies; Springer: Cham, Switzerland, 2018; pp. 73–87. [Google Scholar] [CrossRef]
- Tso, K.S.; Tharp, G.K.; Zhang, W.; Tai, A.T. A multi-agent operator interface for unmanned aerial vehicles. In Proceedings of the 18th Digital Avionics Systems Conference, St. Louis, MO, USA, 24–29 October 1999. [Google Scholar] [CrossRef]
- Nigam, N.; Bieniawski, S.; Kroo, I.; Vian, J. Control of multiple UAVs for persistent surveillance: Algorithm and flight test results. IEEE Trans. Control. Syst. Technol. 2011, 20, 1236–1251. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-Efficient UAV Routing for Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Holcombe, R.G. Integrating Drones into the US Air Traffic Control System; Working Paper; Mercatus Center at George Mason University: Arlington, WV, USA, 2016; Available online: https://www.mercatus.org/publications/technology-and-innovation (accessed on 13 February 2019).
- Wu, J.; Zhang, D.; Pei, D. Autonomous route planning for UAV when threats are uncertain. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference, CGNCC, Yantai, China, 8–10 August 2014. [Google Scholar] [CrossRef]
- Frazzoli, E.; Bullo, F. Decentralized algorithms for vehicle routing in a stochastic time-varying environment. In Proceedings of the 43rd IEEE Conference on Decision and Control, Atlantis, Bahamas, 14–17 December 2004; Volume 4, pp. 3357–3363. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Xue, W.; Li, J. Vehicle routing problem with fuel consumption and carbon emission. Int. J. Prod. Econ. 2015, 170, 234–242. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy Consumption in Unmanned Aerial Vehicles: A Review of Energy Consumption Models and Their Relation to the UAV Routing. In Advances in Intelligent Systems and Computing; Springer International Publishing: Berlin, Germany, 2019; pp. 173–184. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, R.; Jia, G. Vehicle Routing Problems with Fuel Consumption and Stochastic Travel Speeds. Math. Probl. Eng. 2017, 2017, 6329203. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Factors Affecting Energy Consumption of Unmanned Aerial Vehicles: An Analysis of How Energy Consumption Changes in Relation to UAV Routing. In Advances in Intelligent Systems and Computing; Springer International Publishing: Berlin, Germany, 2019; pp. 228–238. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Zbigniew, B.; Nielsen, P. A Solution Approach for UAV Fleet Mission Planning in Changing Weather Conditions. Appl. Sci. 2019, 9, 3972. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef]
- Leishman, D.S. Principles of Helicopter Aerodynamics; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar] [CrossRef]
- Amila Thibbotuwawa; Grzegorz Bocewicz; Peter Nielsen; Zbigniew Banaszak; Unmanned Aerial Vehicle Routing Problems: A Literature Review. Applied Sciences 2020, 10, 4504, 10.3390/app10134504.
- Amila Thibbotuwawa; Grzegorz Bocewicz; P. Nielsen; Z. Banaszak; UAV Mission Planning Subject to Weather Forecast Constraints. Advances in Intelligent Systems and Computing 2019, 1004, 65-76, 10.1007/978-3-030-23946-6_8.