Direct point-cloud visualisation is a common approach for visualising large datasets of aerial terrain LiDAR scans. However, because of the limitations of the acquisition technique, such visualisations often lack the desired visual appeal and quality, mostly because certain types of objects are incomplete or entirely missing (e.g., missing water surfaces, missing building walls and missing parts of the terrain). To improve the quality of direct LiDAR point-cloud rendering, we present a point-cloud processing pipeline that uses data fusion to augment the data with additional points on water surfaces, building walls and terrain through the use of vector maps of water surfaces and building outlines. In the last step of the pipeline, we also add colour information, and calculate point normals for illumination of individual points to make the final visualisation more visually appealing. We evaluate our approach on several parts of the Slovenian LiDAR dataset.
- LiDAR
- point-clouds
- point-cloud visualisation
- terrain reconstruction
- water surface reconstruction
1. Introduction and background
In recent years, aerial data acquisition with LiDAR scanning systems has been used in such diverse scenarios as digital elevation model acquisition [1][2][1,2], discovery/reconstruction of archaeological remains [3][4][3,4], estimating the vegetation density and/or height [5], etc. While in most scenarios the gathered LiDAR data are used for analysis and digital terrain model development, it can also be used for visualisation. This is especially true for large country-wide LiDAR datasets, which can be augmented with colour information from aerial orthophoto data—https://potree.entwine.io. The number of publicly accessible datasets is increasing; however, they are mostly available for download in the raw (or partly classified) form and are rarely visualised online. Many tools have been developed for point-cloud data visualisation on the web (e.g., Potree [6] [6] and Plasio—https://plas.io or as stand-alone applications (e.g., Cloud Compare—https://www.cloudcompare.org and MeshLab—http://www.meshlab.net), but the LiDAR data are rarely used for direct visualisations due to the many inconsistencies and missing parts which makes them less appealing. LiDAR scans may be incomplete because of:
-
parts of the acquired objects/terrain are not in the sensor’s line-of-sight and thus cannot be acquired. For example, vertical building walls, especially in areas with high building density, and mountain overhangs, where parts of the terrain are not visible by the acquisition sensor.
-
the scanned surface does not reflect, but rather refracts, disperses, dissipates or absorbs light. For example, water surface, where the laser beam is mostly refracted into and/or absorbed by the water and there is very low to no reflectance back to the sensor.
All of the above-mentioned cases are displayed in Figure 1. Figure 1a shows missing points in a mountain region (as gray background patches within the point-cloud), while Figure 1b shows missing points in building walls, where gray background colour is visible through buildings and on water surfaces (gray background instead of points on the river whining through the city).
In the past, many researchers have addressed the problem of point-cloud reconstruction for specific domains. A method for generating a digital terrain model (DTM) from aerial LiDAR point-cloud data [7] [7] filters out non-ground objects and provides an efficient way of processing large datasets. The approach extends a compact representation of a differential morphological profile vector fields model [8] [8] by extracting the most contrasted connected-components from the dataset and uses them in a multi-criterion filter definition. It also considers areas with the most contrasted connected-components and the standard deviation of contained points’ levels. The output of the method is a DTM defined on a regular grid with high precision. Such a DTM is also used in our approach as an input for estimating the terrain slope. The need for fast terrain acquisition in disaster management led to the development of a LiDAR-based unmanned aerial vehicle (UAV) system [9] [9] equipped with an inertial navigation system, a global navigation satellite system (GNSS) and a low-cost LiDAR system. The data acquired with the presented system were compared with a high-grade terrestrial LiDAR sensor. The results show that the system achieves meter-level accuracy and produces a dense point-cloud representation. While such systems could be used to acquire the missing data in existing datasets, the large amount of hours needed to identify the problematic regions and acquire the missing data are prohibitive. Our approach addresses the problem without the need for additional data acquisition and also provides the identification of the problematic areas for new data acquisitions.
While the above articles address the problem of terrain reconstruction, there are also several works that address the more specific problem of building and urban area reconstruction. In [10], the authors address the problem of a complete residential urban area reconstruction where the density of vegetation is high in comparison to the downtown areas. They present a robust classification algorithm for classifying trees, buildings and ground by adapting an energy minimisation scheme based on 2.5D characteristics of building structures. The output of the system are 3D mesh models. The authors of [11] [11] present a graph-based approach for 3D building model reconstruction from airborne LiDAR data. The approach uses graph-theory to represent the topological building structure, separates the buildings into different parts according to their topological relationship and reconstructs the building model by joining individual models using graph matching. An approach to 3D building reconstruction [12] [12] uses adaptive 2.5D dual contouring. For each cell in a 2D grid overlaid on top of the LiDAR point-cloud data, vertices of the building model are estimated and their number is reduced using quad-tree collapsing procedures. The remaining points are connected according to their grid adjacency and the model is triangulated. An earlier approach [13] [13] produces multi-layer rooftops with complex boundaries and vertical walls connecting roofs to the ground. A graph-cut based method is used to segment out vegetation areas and a novel method—hierarchical Euclidean clustering—is used to extract rooftops and ground terrain.
A more specific problem of roof reconstruction is addressed in [14][15][14,15]. Henn et al. present a supervised machine learning approach for identifying the roof type from a point-cloud representation of single and multi-plane roofs, and Chen et al. present a multi-scale grid method for detection and reconstruction of building roofs.
While processing and augmenting the point-cloud data are a hard problem on its own, there is also a growing need for real-time visualisation of large point-cloud datasets on the web. Researchers have developed several solutions for such visualisations that address the problem of multiple visualisation scales, data transfer and others. In [16], authors present a web-based system for visualisation of point-cloud data with progressive encoding, storage and transition. The system was developed for integration into collaborative environments with support for WebGL accelerated visualisation.
A multi-scale workflow for obtaining a more complete description of the captured environment is presented in [17]. The method fuses data from aerial LiDAR data, terrestrial laser scanner data and photogrammetry based reconstruction data in an efficient multi-scale layered spatial representation. While the approach presents an efficient multi-scale layered representation, it does not address the streaming problems that occur in web-based solutions.
Peters and Ledoux [18] [18] present a novel point-cloud visualisation technique—Medial Axis Transform—developed for LiDAR point-clouds. The technique renders the points as circles, whereby it adjusts their radii and orientation. In this way, one can use an order of magnitude fewer points for accurate visualisation of the acquired terrain and buildings. This is very useful in cases where one wants to limit the number of points in visualisation to improve performance.
In recent years, several methods [19][20][21][19,20,21] were developed for real-time progressive rendering of point-cloud data which can also be used for web-based visualisations. The first approach can progressively render as many points as can fit into the GPU memory. The already rendered points in one frame are reprojected and then random points are added to uniformly converge to the final render within a few consecutive frames. The second method supports progressive real-time rendering of large point-cloud datasets without any hierarchical structures. The third method optimises point-cloud rendering using compute shaders. All of the presented methods offer an improvement in terms of performance in comparison to traditional point-cloud rendering.
As real-time direct visualization of large points clouds is already made feasible by the recent progress, in contrast to the presented reconstruction methods, our goal is not to extract 3D mesh models from the point cloud, but to augment the point-cloud data with additional points that would make the visualizations more appealing. To accomplish this, we make use of data fusion of the point cloud data with additional data sources data and present an aerial LiDAR data augmentation pipeline designed to address specific issues of terrestrial point-clouds:
-
holes on water surfaces—LiDAR laser beams are mostly refracted into and/or absorbed by the water instead of reflected back to the sensor, which thus creates big holes on surfaces of lakes and rivers,
-
missing vertical building walls—in places where due to the direction of the flight and overreach of the roofs the walls do not get scanned and are thus missing in the point-cloud representation, and
-
holes in mountain overhangs—in places where mountains are so steep that they form overhangs or where due to the direction of the flight parts of mountains do not get scanned and are thus missing in the point-cloud.
2. Methods
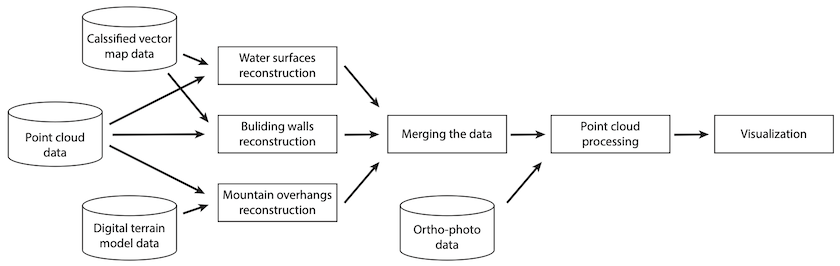
The point-cloud data augmentation pipeline presented in this paper consists of multiple stages. In the first stage, which fuses three data sources, three steps can be performed in parallel: (1) water surface reconstruction, (2) building wall reconstruction, and (3) mountain overhang reconstruction. In the next step, all of the reconstructions are merged into a seamless point-cloud. Finally, we add colour and normal information to make the point-cloud ready for visualisation. The pipeline is presented in Figure 2.
3. Results
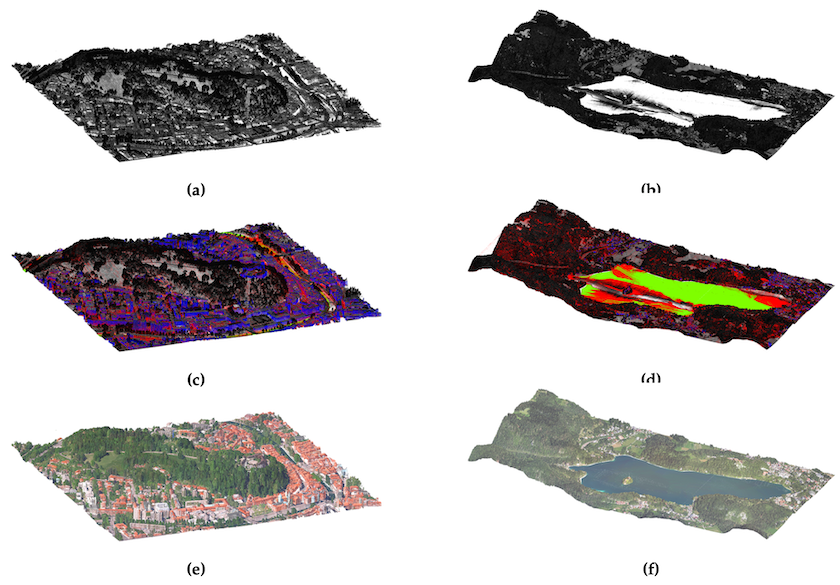
In Figure 3, we present the augmentation results for two sets of data from the Slovenian LiDAR dataset. The first example shows a 1 km2 area of Ljubljana city centre displayed in Figures 3a, c, e, and the second a 6 km2 area of lake Bled with surroundings in Figures 3b, d, f. The first row (Figures 3a, b) displays the input data where points are shaded according to their intensity values. The second row (Figures 3c, d) displays augmentations (water surfaces in green, building walls in blue and terrain reconstruction in red) together with intensity values, and the third row (Figures 3e, f) displays the final output of the proposed augmentation pipeline, where all of the points are merged, the colour information is added from orthophoto images and normal information is calculated using principal component analysis on the point cloud data.
4. Conclusions
The main goal was to augment parts of the dataset where the acquisition process fails to obtain an appropriate amount of points for direct point-cloud visualisation. We addressed three problematic domains: (1) missing points on water surfaces, (2) missing points on building walls, and (3) missing points in mountain overhang regions. Additionally, we added colour information to the point-cloud from aerial orthophoto images and estimated point normals for calculation of illumination. The proposed pipeline allows for fast and easy augmentation of the point-cloud data and outputs a denser point-cloud, more suitable for direct visualisation. To the best of our knowledge, this is the first augmentation pipeline that addresses the weaknesses of raw LiDAR point-cloud data for direct visualization.
As part of future work it is possible to (1) implement the automatic adaptation of some of the parameters of the proposed algorithms to their context (e.g., wall reconstruction) in order to avoid reconstruction errors, (2) develop augmentation algorithms for other problematic features (e.g., bridges, river banks beneath bridges, and roofs), and (3) to preprocess the orthophoto images to remove lighting information and shadows, which currently interfere with our illumination calculations.