The transportation sector remains a major contributor to greenhouse gas emissions. The understanding of energy-efficient driving behaviors and utilization of energy-efficient driving strategies are essential to reduce vehicles’ fuel consumption. However, there is no comprehensive investigation into energy-efficient driving behaviors and strategies. Furthermore, many state-of-the-art AI models have been applied for the analysis of eco-friendly driving styles, but no overview is available. To fill the gap, this paper conducts a thorough literature review on ecological driving behaviors and styles, and analyzes the driving factors influencing energy consumption and state-of-the-art methodologies. With a thorough scoping review process, thirty-seven articles with full text were assessed, and the methodological and related data are compared. The results show that the factors that impact driving behaviors can be summarized into eleven features including speed, acceleration, deceleration, pedal, steering, gear, engine, distance, weather, traffic signal, and road parameters. This paper finds that supervised/unsupervised learning algorithms and reinforcement learning frameworks have been popularly used to model the vehicle’s energy consumption with multi-dimensional data. Furthermore, the literature shows that the driving data are collected from either simulators or real-world experiments, and the real-world data are mainly stored and transmitted by meters, controller area networks, onboard data services, smartphones, and additional sensors installed in the vehicle. Based on driving behavior factors, driver characteristics, and safety rules, this paper recommends nine energy-efficient driving styles including four guidelines for the drivers’ selection and adjustment of the vehicle parameters, three recommendations for the energy-efficient driving styles in different driving scenarios, and two subjective suggestions for different types of drivers and employers.
- driving behavior
- driving pattern
- energy efficiency
- artificial intelligence
1. Introduction
2. Energy-Efficient Driving
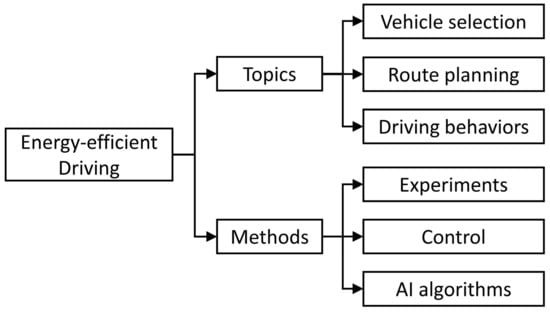
2.1. Overview of Energy-Efficient Driving Research
2.2. Data Sources for Energy-Efficient Driving Research
Before modeling driving behavior and studying its impact on fuel consumption, it is significant to collect the vehicle and driver data in real-world conditions. There are various data sources of driving behaviors, including simulation tools, meters, CANbus, OBDs (on-board diagnostics), and smartphones, which are shown in Table 14.| Data Sources | Counts | Ref. | |
|---|---|---|---|
| Simulation data | 14 | ||
2.3. Variables Reflecting Energy Efficiency
To assess energy efficiency, different variables are selected and computed in distinct research. Table 25 shows the four variables regarding energy efficiency.| Variables | Units | |
|---|---|---|
| Fuel consumption | mL/s [13][13[41],49] g [7] L/km [8] L/100 km [11][29][42][50][11,25,31,40] gallon/mile [35][22] mL [23][24][25][28,29,36] kg [51][32] gallon [32][44[33],45] | [21][22][23][24][25][26][27][28][29][30][31][32 |
| Categories | Influencing Factors | Definition | |
|---|---|---|---|
| ] | [ | 33][34][21,27,28,29,36,37,38,39,40,41,42,44,45,46] | |
| Embedded sensors | |||
| Factors reflecting driving behaviors | Speed | real-time linear velocity of the vehicle | |
| Electrical energy consumption | Meters | Wh/km [10][38]5 | [10,23] J [38][23] kwh/100 km [14][52][14,48] kwh [36][37][30,47] Wh [26][37] [14][17 |
| Acceleration | kJ/s [31][42] | ] | [35 |
| real-time acceleration of the vehicle | ] | [ | 36][14[,2237,26,30],47] |
| CANbus | 6 | Fuel economy | km/L [44][24] mile/gallon [28][39][13][35][38][39][40][41][13,22,23,35,43,49] |
| OBDs | 5 | ||
| CO2 emissions | g/km [21][52][21,48] g/mile [35][22] g [34][46] | [7][11][12][42][43][7,11,12,31,33] | |
The variables are mainly divided into energy consumption and energy economy. Energy consumption signifies the amount of fuel or electricity a vehicle utilizes to cover a specific distance.
2.4. Factors Impacting Energy-Efficient Driving Behaviors
3.4. Factors Impacting Energy-Efficient Driving Behaviors
VAs Table 3 demonstrates, v| Deceleration | |||
| real-time deceleration of the vehicle | |||
| Pedal | (gas/brake/clutch) pedal force, pedal frequency, and pedal depth | ||
| Smartphones | 2 | ||
| Steering | [ | 39][43] | angle of the rotating steering wheel[33,35] |
| Additional sensors | 9 | [10][11][12][13][14][40][41][44][45][10,11,12,13,14,24,34,43,49] | |
| Gear | ||
| selection of gear ratio of a manual vehicle | ||
| Engine | engine load and engine speed | |
| Factors impacting driving behaviors | Distance | distance between vehicles, distance from vehicle to the traffic light infrastructure and distance from vehicle to the station |
| Weather | temperature, visibility, rainfall, and wind speed | |
| Traffic signal | traffic signal status generated from the infrastructures | |
| Road | road geometry, road slope and radius of the curve of the road |
An optimized engine control strategy is another significant approach for fuel saving through the speed selection of the transmission box and the control of pedal force and depth. The gear shift and pedal control can affect the energy efficiency of the engine [40][43].
Distance is the most popular research point that impacts driving behavior, which contains multiple features, including the distances to the traffic lights or the station and those between the vehicles in different scenarios and rules [12][24][51][12,29,32].
The combination of the mentioned features is also discussed in the literature. For instance, four types of influential variables including vehicle characteristics, driver characteristics, driving behavior, and weather conditions are summarized in [8], and a fuel-consumption classification model based on the decision tree was established to train the generated datasets. The driving behavior data from the CANbus dataset and questionnaires is collected in [38][23] with the velocity, acceleration, and steering wheel angle being generated from CANbus, while the questionnaire assembles the subjective driving characteristics (e.g., self-confidence, impatience, and rude driving behavior). The data from a driven vehicle, including the velocity, acceleration, pedal variables, engine parameters, road conditions, etc., are measured in [50][25], and a real-time fuel consumption estimation method is proposed for recommending the optimal speed in time. Furthermore, a deep-learning framework is developed in [11] to analyze the data from the OBD-II module and CANbus, where the input features include the velocity and engine parameters.2.5. AI Models Applied in Energy-Efficient Driving Research
3.5. AI Models Applied in Energy-Efficient Driving Research
23.5.1. Prediction Models for Energy-Efficient Driving
The prediction models include regression and classification tasks. In regression tasks, the values of the target features (e.g., fuel consumption) are predicted by training a combination function based on the input variables [21][23][21,28]. In classification tasks, the driving styles are classified into several groups (e.g., energy-efficient and inefficient styles) [43][45][33,34]. Specifically, the unsupervised classification methods (the clustering methods) group the data based on their similarities [39][35]. The linear regression family is the most popular model in the cases because it is a transparent and easy-implemented approach [2][7][13][21][22][29][38][44][50][53][2,7,13,18,21,23,24,25,27,40]. The contribution of each input variable can be recognized from the weights, allowing good mathematical interpretation [54][61]. For instance, bivariate regression methods are used in [13] to predict the relationships between each influencing factor and fuel consumption. The energy-efficient driving suggestions are made based on a series of regression lines. For example, the contributions of different energy-efficient driving rules to CO2 emission reduction are measured through linear regression analysis in various scenarios in [21].23.5.2. Reinforcement Learning for Energy-Efficient Driving
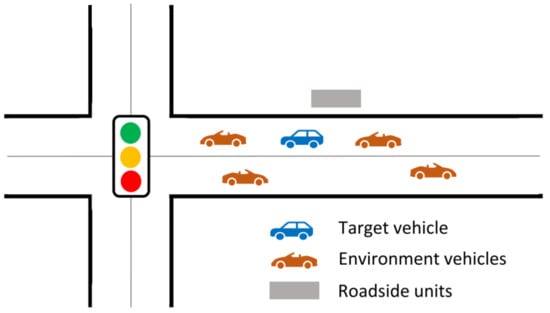
Reinforcement learning (RL) is mainly used to optimize agents’ actions in an environment by repeated interactions to maximize the cumulative reward [55][56][63,64]. The establishment of an RL environment is typically based on the Markov decision process (MDP) which is a discrete-time stochastic control process [57][65]. An RL framework is agent-based, with the agent being the targeted vehicle whose fuel consumption is targeted to be minimized, and the surrounding vehicles, roads, signals, traffic rules, and other parameters constitute the environment [25][36]. The general scenario is visualized in Figure 24. The roadside units represent the facilities that affect the driving styles, including bus stations, schools, etc.