Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Samuel David Iyaghigba and Version 2 by Rita Xu.
Many different types of aircraft designs have flight control systems (FCS) powered by hydraulic systems. With respect to the torques, moments, surface areas, and opposing forces to be acted upon, components introduce faults into the hydraulic system when these components are aging or degrading. The diagnostics of a hydraulically powered flight control actuation system (HPFCAS) rely on the faults produced within the subsystem components as well as the entire system’s mechanism itself.
- aircraft systems
- fault detection
- diagnostics
1. Introduction
The HPFCAS is used for the flight control and management of some aircraft. This controls the main primary control surfaces like the aileron, elevator, and rudder. Sometimes the secondary control surfaces, involving the trim systems, slats, flaps, slits, and spoilers, regarded as auxiliary control surfaces, are also involved. In fact, hydraulically powered control is also used for heavy lifts like the undercarriage of the aircraft due to the power-to-weight ratio advantage of hydraulic systems. The authors of Ref. [1] stated that, with a little hydraulic fluid in a cylinder, an enormous amount of load is moved with the hydraulic pressure, if it is properly channeled without leakage.
Apart from the leakage mentioned, there is loss of pressure in the system through different component faults like valve sticking, corrosion or erosion, filter clogging, the loss of pump speed, bearing noise, pipe leakage or blockage, the loss of electric power to the motor, fluid temperature increases, cavitation, and many more [2][3][4][2,3,4]. These are regarded as symptom vectors that cause many faults within the system. Thus, these faults were viewed as mechanical, electrical, and hydraulic faults obtained from the different subsystems. However, the subsystems make up the entire system by virtue of the operating principles of the components used. The effects of these faults, grouped as mechanical, electrical, and hydraulic, are interwoven, where the fault triggered by the symptom vectors of one component may propagate a fault in another component, thus making the SOS fault approach suitable.
It is established that fault propagation from one aircraft subsystem to another has become more frequent due to the increased interactions between the aircraft systems [5]. Although some of these faults are addressed during maintenance activities, if a fault takes an unexpected propagation path, its cascading effects are difficult to troubleshoot. Models of aircraft systems were used in the past for diagnostics, for example, in an environmental control system model, an electrical power system model, and an engine system model [5][6][5,6], but these were not broken down into SOS. Since fault propagation occurs due to faults of one aircraft subsystem affecting other interacting systems, in modeling HPFCAS faults, the HPFCAS is broken into subsystem models. It is noted that only a few research works consider subsystem/system interactions at the top aircraft vehicle level [7]. With the trend of increasingly integrated systems in the aircraft industry, the complexity of interactions between aircraft systems is increasing. This has resulted in the necessity of monitoring aircraft systems’ health both within the subsystems and across the systems.
To investigate these effects, a study of two aircraft HPFCASs was carried out. The working principles of the HPFCAS for the different aircraft in relation to hydraulic system performance were the same. To compare their performances against related flight conditions and identify what appear to be observed root causes and effects on the HPFCAS, it was noted that demand for responses is channeled to a hydraulic reservoir through transducers. The hydraulic reservoir is then used to power the required actions. To obtain the required data that would be useful in supporting fault findings and can be used for diagnostics of such complex systems, an experimental model as an analogy of the two aircraft’s HPFCASs was developed as a test rig in the laboratory based on the functions of their different components. The two system cases provided a fair representation of the HPFCAS and mimicked the functions of a baseline HPFCAS for any aircraft. To ensure a robust representation, experimental data were collected to establish the basis for component functional behavior or characteristics. These data were obtained under healthy and degraded scenarios. Using the same conditions of operation, faults were introduced on the components based on the symptom vectors earlier described. The data for unhealthy cases were collected. Thereafter, a system-by-system breakdown of the component models was made and integrated. A simulation model of the experiment was developed in MATLAB Simulink and Simscape version 2023a using the experimentally defined conditions. Simulations were completed for the healthy cases, and results were obtained. After these, the faults were injected into the components to establish the unhealthy cases and simulated. Different values were established in both the healthy and unhealthy situations, respectively. The comparison between the experimental data and the simulated model data obtained provided verification and validation results of the developed model. These provided the requirements needed for the expected diagnostic of the aircraft’s HPFCAS, as different conditions of operations of the components were altered with the different data results obtained.
It should be noted here that access to repository data of the HPFCAS was not readily available, and manufacturers of the two aircraft types were not ready to volunteer their data to the public domain. However, the suitable data needed for future work on HPFCAS diagnostics were generated by the developed model. The discussion on the HPFCAS diagnostics using the developed SOS model will be presented in a different paper. Perhaps, one of the vital benefits of this approach is that the data required for a system diagnostic can be generated from the simulations of the subsystem models as useful performance data of the system. These data can be used for the development of digital twin capabilities in the modeling of aircraft systems, whereby useful system performance data is needed.
It is well understood that one of the main requirements for good system fault analysis is the availability of sufficient data. These data must be richly obtained in a manner suitable for the diagnostics analysis. For many years, efforts regarding data acquisition have been intensified through sensor technologies for extracting useful information. For more robust data, the sensors were enhanced through calibrations for optimum performance [8][9][8,9]. Thus, the extraction of the sensor information and the processing of this information into quantifiable and qualitative data for usage in system diagnostics involve the development of the right models. The authors of Ref. [10] stated that, in recent times, there has been a quantum volume of repository data available that can be accessed. However, whether such a repository of data has a good generic bearing on the system and component degradation experience is still under investigation. This is because, although the data may exist, obtaining the exact or right data that correlate with the performance of a system and are specifically required for the proper diagnostics of faults or failures in a particular system is difficult.
Although passive fault management tools for maintenance and monitoring of system models are put in place to support maintenance processes and arrest the breakdown of systems, these do not assure the users of their regular availability. This means fault management tools must be designed for each individual subsystem that makes up the entire system. This is because the modes of failure of the subsystems would not be the same in all cases. In their research, Refs. [11][12][11,12] collaborated in making these statements. They stated that the results displayed to interpret the presence of faults in a physical system must relate to the simulated system’s model type. That is, from the system data used in carrying out an analysis, both the generated data obtained when the physical system is deployed and the simulated data obtained must be sufficient in comparison. This will also depend on the type of algorithm to be deployed or used for the data analysis. The authors of Refs. [6][10][11][12][6,10,11,12], in their separate research works, asserted clearly that the different models of systems are used to generate the basic diagnostic requirements. These requirements are peculiar to the functions or workings of a system. Hence having a complete model of a system that mimics its functionality will provide the needed data. These data can be compared with other repository data of similar features if they can be used as a validation or verification process. In situations where the information is incomparable, the sole responsibility would fall on the credibility of developing a model of the system, where data can be obtained and used for analyzing its failures. In fact, of critical importance in modern-day diagnostics is the emergence of the system-level diagnostic approach. System-level diagnostic targets, aim at assessing accurately a system’s health state and detecting and identifying faults in the system’s faulty components. These make the development of models essential because, without the subsystem model’s data, a system-level integration for carrying out diagnostics will increase the burden. In [13], a model for fault simulations and diagnostics of a Boeing 747 auxiliary power unit was created. Meanwhile in research work [14], a model to investigate automation and communication methodology for data exchange was developed. Similarly, in working on the simulation of an aircraft environmental control system, the authors of Ref. [5] created a model of the system for simulating the behavior of the components, integrated into the system. Thus, the authors of Ref. [15], in developing and implementing a framework for aerospace vehicle reasoning, utilized many models of aircraft systems. These indicate that developing models for diagnostics and other analyses is important.
2. Hydraulically Powered Flight Control Actuation System
A literature review on fault and diagnostic processes for different FCASs shows variations in approaches. Of particular interest was the HPFCAS [16][21] in one study, which established a suitable approach where the fault-finding challenges of multisystem configurations or integrations on an aircraft are separated into different systems. This is for a model-based diagnostic method and for a principal understanding of the physics of the HPFCAS system. That is, the models of the system will be developed with the physics-based knowledge of the separated subsystems. This must be well understood. However, accessing the historical data was problematic. Adequate data and algorithm development to match the HPFCAS diagnostic model were lacking. For hydraulic systems, any single system or component failure is a principal failure mode, as well as any combination of failures. Therefore, common-mode failures that can affect multiple systems are usually principal failure modes. These were designated as research gaps. Some parts that constitute a build-up process have been documented and are shown in the Venn diagram of Figure 1.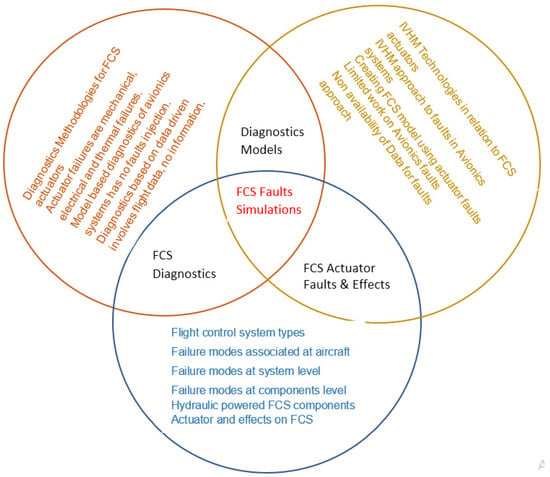
Figure 1. Venn diagram of the scope.