Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Camila Xu and Version 1 by Nikola Mardešić.
The Vehicle Routing Problem (VRP) is a combinatorial optimisation problem that aims to determine the optimal set of service sequences and routes from a depot to geographically dispersed customers, considering operational constraints.
- stochastic dynamic vehicle routing problem
- Markov decision process
- approximate dynamic programming
1. Introduction
Urban logistics encapsulate the management and coordination of transportation and delivery operations within densely populated urban areas by accounting for diverse factors like population density, traffic variability, customer behaviour, and environmental regulations. A pivotal challenge within this domain is the last mile, marked by its high costs, inefficiency, and environmental impact [1]. This challenge is further amplified by the surge in contemporary online on-demand services, which intertwine with the Stochastic Dynamic Vehicle Routing Problem, adding layers of complexity to an already intricate urban logistics landscape. As cities evolve, the dynamics of these challenges demand innovative solutions for efficient and sustainable urban logistics frameworks.
As a result of urban logistics planning, customer orders are allocated to vehicles by determining the most efficient visiting sequence of customers and routes [1], i.e., by solving an instance of the Vehicle Routing Problem (VRP). Traditionally, urban logistics problems were approached from a deterministic perspective, assuming all relevant data was known exactly and collected before problem solving. Moreover, the data were considered static, with no consideration for changes over time. This approach relied on predetermined routes and fixed delivery schedules. However, the rise of dynamic online platforms has made this approach inadequate. On-demand services have introduced stochasticity and complexity due to evolving customer behaviour, higher order volumes, stricter delivery windows, and the demand for fast and reliable service [1]. Therefore, a paradigm shift towards real-time logistics has become imperative. Urban logistics now face numerous sources of stochastic information, including fluctuating demand, specific requests and preferences, variable travel times, parking availability, as well as crowd-sourced drivers and their behaviours. To address these challenges and maintain competitiveness, logistic service providers must adopt proactive and anticipatory approaches to route planning and execution. As a result, the concept of Stochastic Dynamic VRP (SDVRP) has emerged in the VRP literature. SDVRP accounts for the urban logistics dynamic and stochastic environment by dynamically modelling and evaluating probable (future) events, i.e., stochastic information. As observed in the literature, the inclusion and evaluation of future potential events consequently improved the level of service provided to customers.
2. Vehicle Routing Problem
The Vehicle Routing Problem (VRP) is a combinatorial optimisation problem that aims to determine the optimal set of service sequences and routes from a depot to geographically dispersed customers, considering operational constraints [10][2]. As illustrated in Figure 1, assigning customers to vehicles and determining the sequence of visits for each vehicle are fundamental elements in finding a solution to the VRP.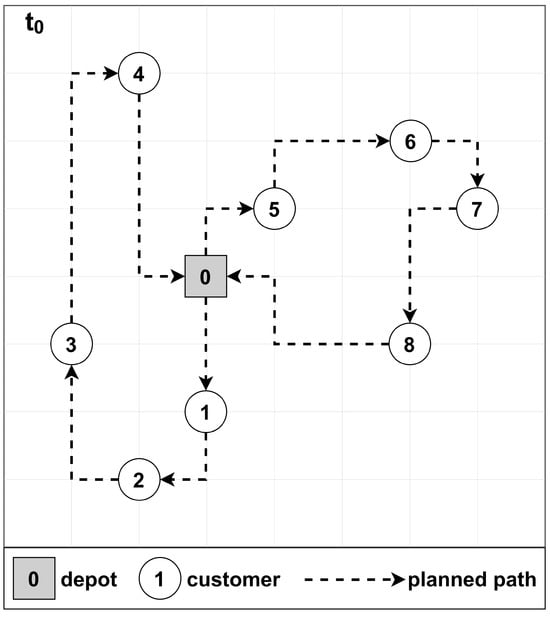
Figure 1.
Route planning of two vehicles.
2.1. Evolution and Quality of Information
From an information perspective, VRPs involve the evolution and quality of information [11][3]. The evolution of information in VRPs refers to the changing nature (static or dynamic) of available information during route execution. This includes adapting to changes, such as incorporating new customer requests that arise after the vehicle has already left the depot. On the contrary, the latter refers to the degree of uncertainty (deterministic or stochastic) in the available data. This uncertainty highlights the potential variability in the accuracy and reliability of the information. For instance, a customer’s demand is known only as a range estimate rather than an exact value. Furthermore, decision makers can design service sequences either a priori or online. A priori refers to planning the sequence before the vehicle departs, while online involves adjusting or constructing the sequence after the vehicle has left the depot.- -
-
Static and deterministic: All relevant data for the problem are available from the beginning and remain constant throughout the route execution. There are no unknown or uncertain elements, allowing for the design and execution of routes based on complete and fixed information. Figure 2 illustrates the planning and execution phases of a static and deterministic VRP. The planning phase (𝑡0) involves generating a feasible solution for the known problem inputs, such as customer requests. In the execution phase (𝑡𝑘−𝑛), the ongoing process of servicing customers unfolds. Although new inputs may arrive during this phase, the planned routes remain static. The process repeats at the termination phase (𝑡𝑘), where a new cycle begins with planning and execution based on new inputs.
-
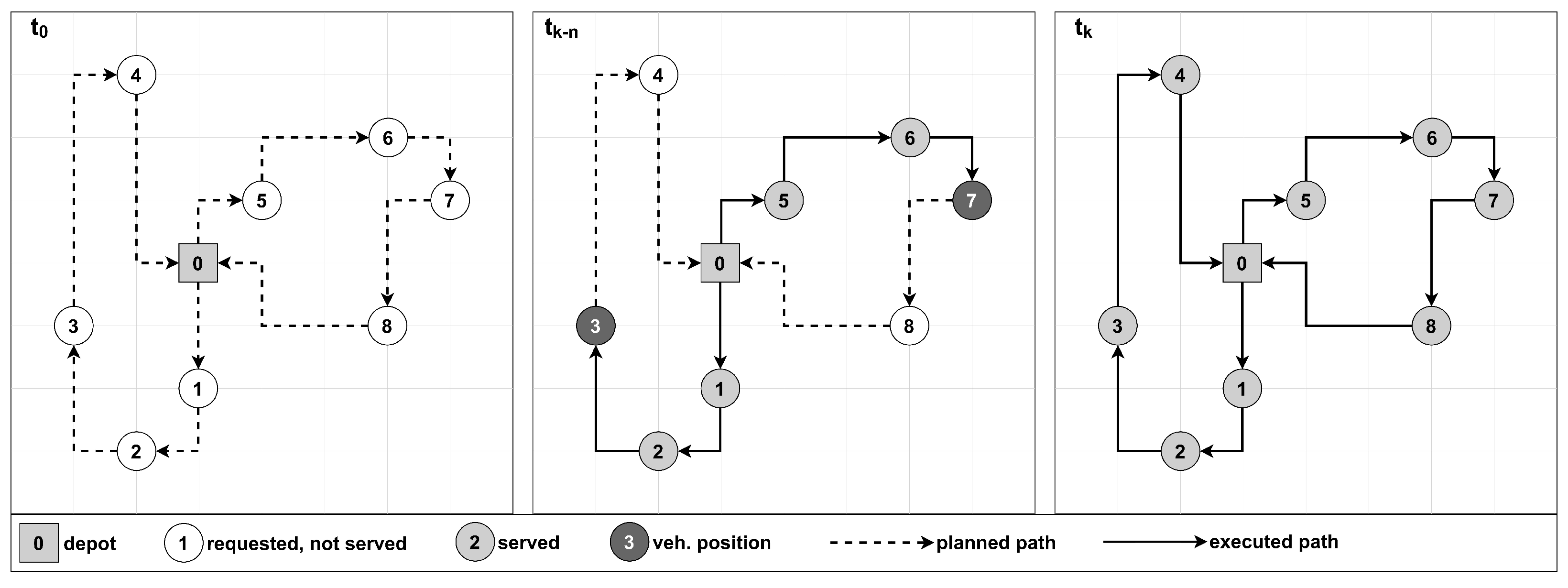 Figure 2.Example of static and deterministic vehicle routing.
Figure 2.Example of static and deterministic vehicle routing. - -
-
Static and stochastic: Certain problem elements, such as requests, travel times, or demands, are only partially available and modelled with certain distribution functions. As the route executes, the actual values of these parameters become known. While routes are pre-designed, they can be adjusted as needed. For instance, the route has to be modified if a customer’s demand exceeds the forecasted demand and thus exceeds the available vehicle capacity. Figure 3 illustrates the static and stochastic VRP’s planning and execution phases. In the planning phase (𝑡0), a feasible solution is generated for known inputs like customer requests and associated demand values, which can be either deterministic or stochastic. For instance, request number three (3) features a stochastic demand. During the execution phase (𝑡𝑘−𝑛), as the vehicle services customers, unexpected issues may arise. At request number three (3), it is discovered that the initial estimate of the demand exceeds the vehicle’s capacity. Subsequently, a new feasible plan is devised, leading the vehicle to return to the depot, unload excess capacity, and then resume the route, including request number three (3). This cycle repeats in the termination phase (𝑡𝑘), initiating a new planning and execution cycle based on updated inputs.
-
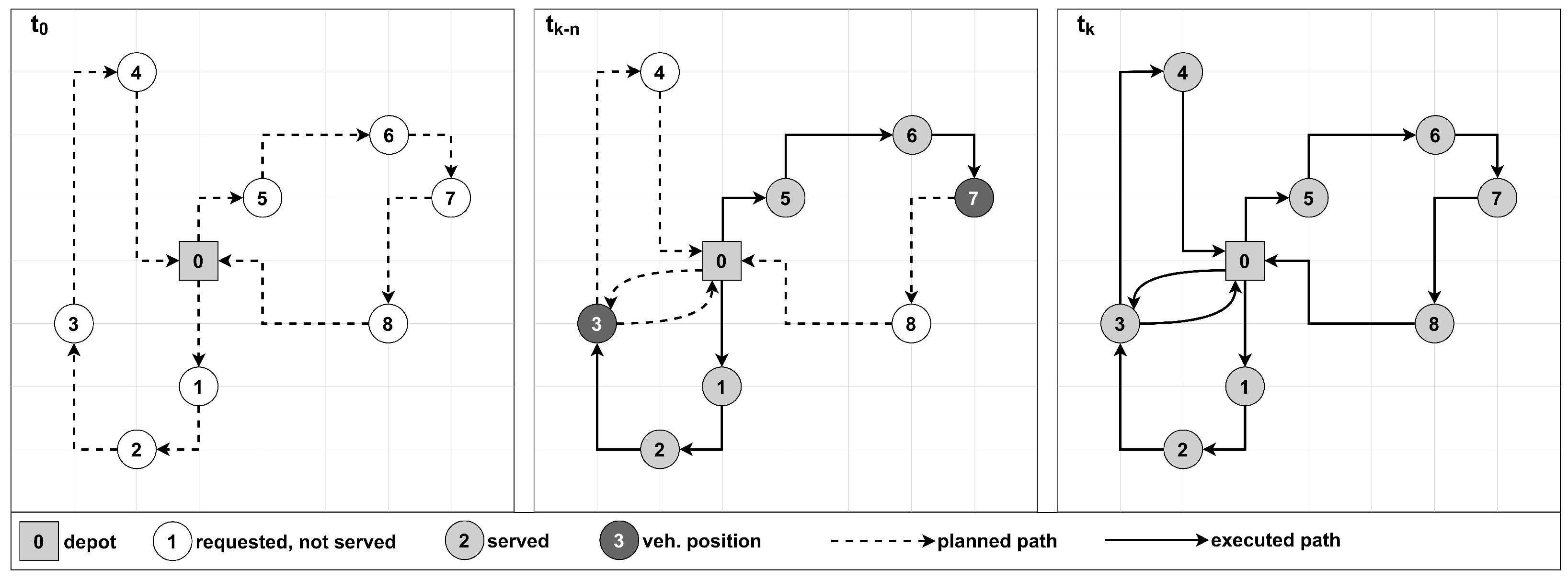 Figure 3.Example of static and stochastic vehicle routing.
Figure 3.Example of static and stochastic vehicle routing. - -
-
Dynamic and deterministic: Some or all problem data are initially unavailable but gradually revealed during the planning and execution. There are no inherent uncertainties in the variables. For example, when a new dynamic event occurs, complete and fixed information about it becomes available at the time of the event. Figure 4 illustrates the planning and execution phases of a dynamic and deterministic VRP. The planning phase (𝑡0) involves generating a feasible solution to the known problem and the execution phase (𝑡𝑘−𝑛) allows for dynamic route adaptation to the changing conditions. New customer requests are revealed during execution and the DVRP accommodates their inclusion in the current routes, adhering to constraints. Dynamic adaptation aims to enhance fleet resource utilisation by promptly adjusting their plans to recent information.
-
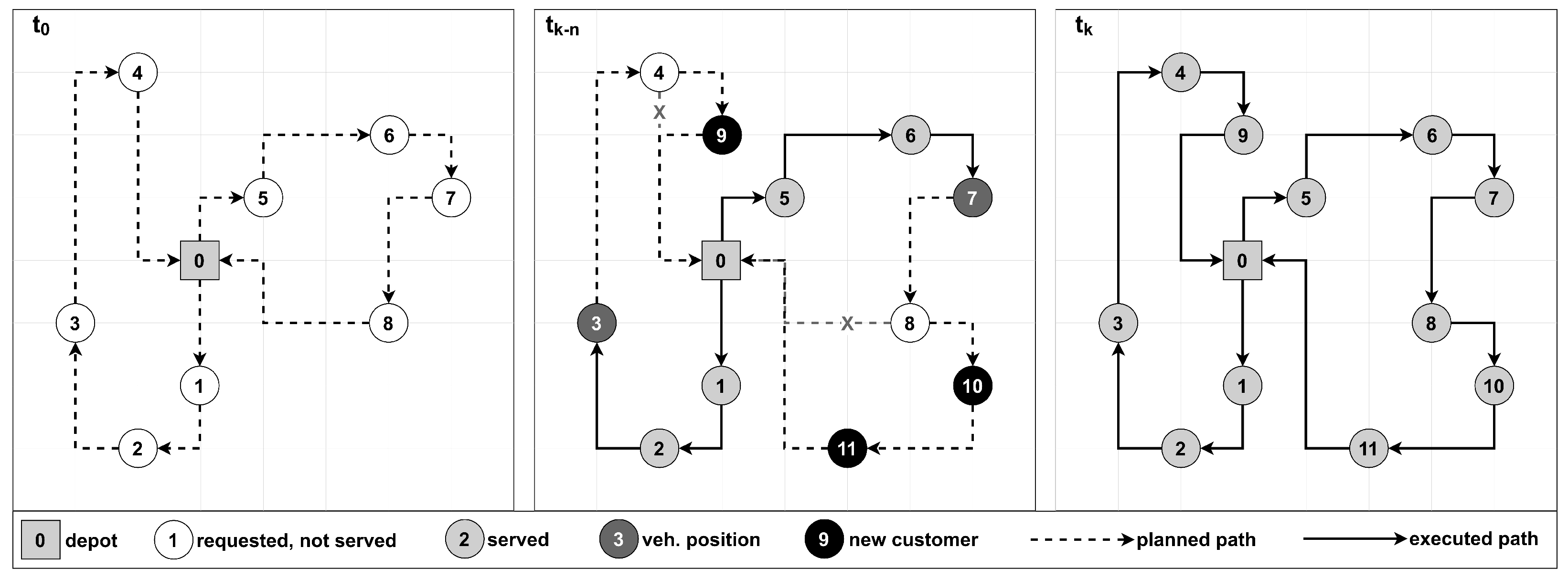 Figure 4.Example of dynamic and deterministic vehicle routing.
Figure 4.Example of dynamic and deterministic vehicle routing. - -
-
Dynamic and stochastic: This problem category involves gradual information revelation and stochastic variables that add uncertainty. Decision makers continuously sample probable (future) scenarios and adjust service sequences and routes in response to changing conditions and probability distributions. Figure 5 illustrates the planning and execution phases of a dynamic and stochastic VRP. In the left frame, the initial planning phase generated a set of feasible, optimised routes without accounting for probable future events. In the middle frame, the a priori planning phase considers known information and anticipated inputs sampled from probability distributions. Including such data in planning and execution horizons leads to proactive actions that enhance operational efficiency, customer satisfaction, and fleet resource utilisation.
-
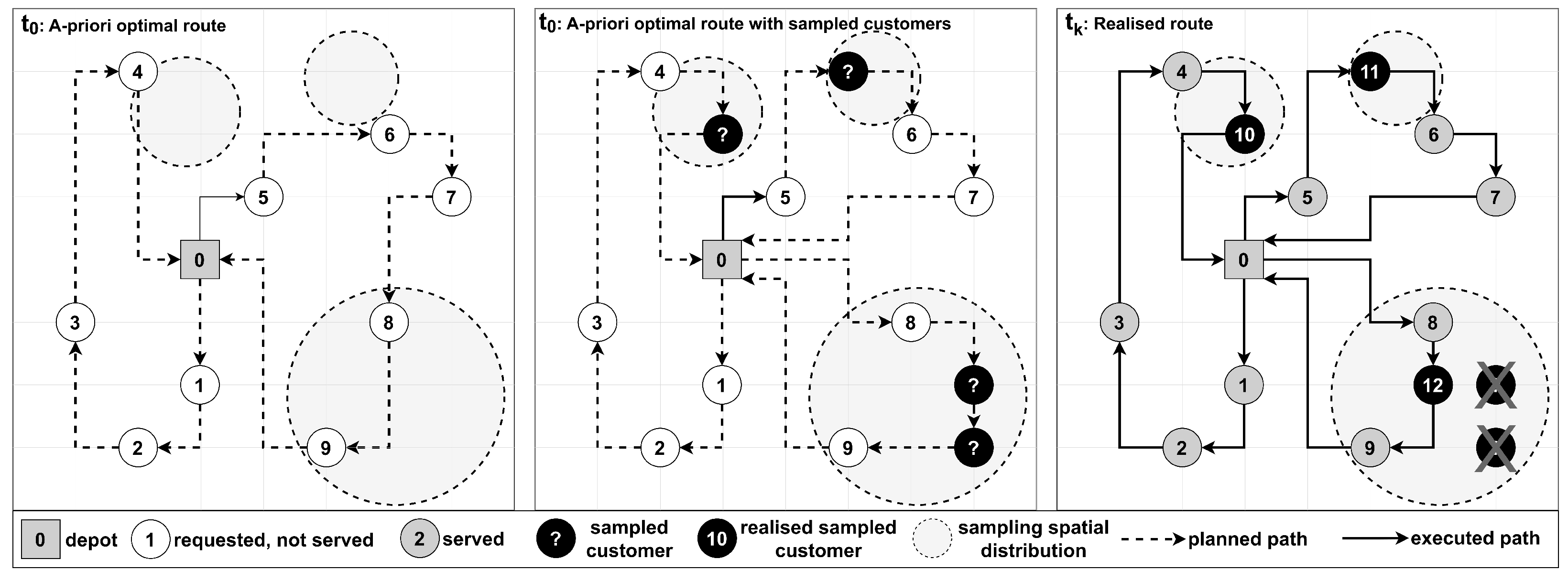 Figure 5.Example of dynamic vehicle routing with stochastic requests.
Figure 5.Example of dynamic vehicle routing with stochastic requests.
2.2. Conventional Solution Methods
Over the years, extensive research has been conducted on VRPs, since their formal definition in [12][4]. For a comprehensive overview of the VRP taxonomy, one may seek the review presented in [13][5]. Traditionally, the majority of VRPs were considered static and deterministic. Researchers have developed various solutions using Mixed Integer Programs (MIPs) based on mathematical graphs to generate optimal or near-optimal solutions for small instances. However, the non-polynomial complexity associated with VRPs, i.e., the solution space expands significantly as the problem size increases, making it computationally challenging to find optimal solutions for larger problem sizes using exact methods alone. To address this challenge, researchers have incorporated heuristics and metaheuristics in their solution approaches for VRPs. These enhanced approaches enable the application of VRPs to real-world scenarios, including large problem instances.2.2.1. Exact Algorithms
Exact algorithms are highly effective for solving VRPs by finding the optimal solution. In the case of VRP instances with 50 to 100 customers, problem solvers can employ various exact methods, including branch and bound [14[6][7],15], dynamic programming [16][8], linear integer programming [17][9], and more. These methods systematically explore the solution space to determine the optimal routing configuration that minimises the objective function.2.2.2. Heuristic Algorithms
As optimisation algorithms, heuristics are employed to obtain satisfactory solutions within a reasonable timeframe. Heuristics leverage problem-specific knowledge and experience to guide the search for feasible solutions. They may involve trial and error, approximation, or problem simplification and do not guarantee finding the optimal solution. However, they can often find good solutions quickly and are widely used in practice due to their efficiency. There is a tradeoff between the runtime and solution quality of heuristics for the VRP. The quality of the final solution tends to improve the longer the heuristics are executed. Heuristics for the VRP can be divided into constructive and improvement heuristics [18][10]. Constructive heuristics for the VRP are algorithms that generate a solution by constructing routes through the set of customers. These heuristics use intuitive strategies, such as adding the nearest unvisited customer to the route until all customers are visited. Noteworthy constructive heuristics for the VRP include the Clarke and Wright savings algorithm [19][11], nearest and farthest insertion [20][12], and nearest neighbour [20][12] methods. These heuristics can be executed in serial or parallel mode, depending on the algorithm and available computational resources [21][13]. Selecting an appropriate solution construction approach is vital as it significantly impacts the search space, the likelihood of finding the optimal solution, and the overall running time. Improvement heuristics are algorithms that explore the neighbourhood of the current solution to improve the VRP solution [22][14]. Within the VRP domain, they are often referred to as Local Search (LS) procedures. These heuristics iteratively modify the current solution by applying minor changes and evaluating the resulting improvement in the objective function. Notable operators used in local search heuristics include relocate and exchange operators [23][15], or-opt-k operators [24][16], and 2-opt operators [25][17]. These heuristics effectively enhance the solution quality by focusing on the immediate neighbourhood of the current solution. However, it is vital to consider their sensitivity to the initial solution and the specific search neighbourhood employed, as they may converge to local optima. When combined with other heuristics or metaheuristics, local search operators can improve the quality of VRP solutions [18][10]. Using multiple local search improvements in a single algorithm iteration for a VRP route can improve the quality of the solution and make the overall algorithm faster [26][18]. This approach requires fewer moves as the operators work together to find a better solution, potentially reducing the number of iterations needed to converge to a high-quality solution. The key is ensuring that the applied operators do not interfere with each other. One way to achieve this is to use algorithms that operate on different parts of the solution space, such as exchanging pairs of customers in the route or reordering sub-sequences of the route. By acting on different segments of the solution space, the operators are less likely to interfere with each other and can work together to find a better solution more efficiently.2.2.3. Metaheuristic Algorithms
Metaheuristics are a broad class of optimisation algorithms that enhance the probability of escaping the local optimums by exploring the usually vast solution search space [21][13]. Local optimums are defined as solutions that may be optimal only within a limited region of the solution space. In achieving the globally optimal solution, metaheuristics must explore the broader solution space and avoid getting trapped in the optima. This exploration process may involve accepting deteriorated objective function values and generating infeasible solutions, thereby diversifying the search space and increasing the likelihood of finding the global optimum [1]. Metaheuristics strike a balance between exploring the solution space and intensifying search efforts in specific regions, allowing them to search widely for new solutions while also improving solutions within targeted areas. Notable population-based metaheuristics for the VRP include the genetic algorithm [27][19], scatter search [28][20], ant colony optimisation [29][21], artificial bee colony [30][22], and particle swarm optimisation [31,32][23][24]. Furthermore, noteworthy neighbourhood-oriented metaheuristics for the VRP encompass simulated annealing [33[25][26][27],34,35], taboo search [36[28][29],37], variable neighbourhood search [38][30], iterated local search [39][31], and adaptive large neighbourhood search [40,41][32][33].2.2.4. Hyper-Heuristic Algorithms
Hyper-heuristics are metaheuristics that provide adaptability to handle various problem instances by leveraging the observation that particular problem-solving approaches, i.e., heuristics, exhibit superior performance in specific cases. The domain encompasses two distinctive branches: selective and generative hyper-heuristics. Through the dynamic selection of algorithms based on measurable instance features, selective hyper-heuristics enable the identification of the most suitable heuristic for each problem instance. This flexibility enhances the overall solution quality and effectiveness in VRPs by harnessing the strengths of different heuristics. Addressing the Algorithm Selection Problem (ASP) in dynamic VRP problem instances, the authors in [42][34] utilised a simulation-based supervised learning approach. They evaluated 72,000 instances using 432,000 simulations, comparing the performance of the Greedy and Replanning algorithms. The aim was to differentiate problem instances based on measurable features, after which the suggested framework would select the most suitable algorithm for each. The problem instances were distinguished via classification, regression models, and Artificial Neural Networks (ANN). The authors concluded that out of the two examined algorithms, the Greedy algorithm outperformed Replanning in particular problem instances, highlighting the need to leverage algorithms based on specific problem characteristics. In another study, the authors provided a definition of algorithm building blocks and a measure of algorithm quality, where generative hyper-heuristics employ automated processes to evolve heuristics tailored to specific problem instances [43][35]. Unlike selective hyper-heuristics, which dynamically choose from pre-existing heuristics, generative heuristics explore algorithmic spaces, crafting novel heuristics optimised for unique routing challenges, demonstrating adaptability in dynamic and stochastic conditions [43][35]. Due to its flexible representation, one of the most prominent methods for automated heuristic generation methods is Genetic Programming (GP) [44][36]. One may find examples of approaches utilising GP in the domain of DVRPs and Electric Vehicle-DVRPs in the works presented in [43,44,45,46][35][36][37][38]. -
-
-
-
References
- Ehmke, J.F. Integration of Information and Optimization Models for Routing in City Logistics; Number 978-1-4614-3628-7 in International Series in Operations Research and Management Science; Springer: New York, NY, USA, 2012.
- Laporte, G. The vehicle routing problem: An overview of exact and approximate algorithms. Eur. J. Oper. Res. 1992, 59, 345–358.
- Psaraftis, H.N. A Dynamic Programming Solution to the Single Vehicle Many-to-Many Immediate Request Dial-a-Ride Problem. Transp. Sci. 1980, 14, 130–154.
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91.
- Eksioglu, B.; Vural, A.V.; Reisman, A. The vehicle routing problem: A taxonomic review. Comput. Ind. Eng. 2009, 57, 1472–1483.
- Fisher, M.L. Optimal Solution of Vehicle Routing Problems Using Minimum K-Trees. Oper. Res. 1994, 42, 626–642.
- Ropke, M.I.S.; Cordeau, J.F.; Vigo, D. Branch-and-cut-and price for the capacitated vehicle routing problem with two-dimensional loading constraints. Proc. ROUTE 2007.
- Eilon, S.; Watson-Gandy, C.D.T.; Christofides, N.; de Neufville, R. Distribution Management-Mathematical Modelling and Practical Analysis. IEEE Trans. Syst. Man, Cybern. 1974, 21, 589.
- Gheysens, F.; Golden, B.; Assad, A. A comparison of techniques for solving the fleet size and mix vehicle routing problem. Oper.-Res.-Spektrum 1984, 6, 207–216.
- Bräysy, O.; Gendreau, M. Vehicle routing problem with time windows, Part I: Route construction and local search algorithms. Transp. Sci. 2005, 39, 104–118.
- Clarke, G.; Wright, J.W. Scheduling of Vehicles from a Central Depot to a Number of Delivery Points. Oper. Res. 1964, 12, 568–581.
- Rosenkrantz, D.J.; Stearns, R.E.; Lewis, P.M., II. An Analysis of Several Heuristics for the Traveling Salesman Problem. SIAM J. Comput. 1977, 6, 563–581.
- Vidal, T.; Crainic, T.G.; Gendreau, M.; Prins, C. Heuristics for multi-attribute vehicle routing problems: A survey and synthesis. Eur. J. Oper. Res. 2013, 231, 1–21.
- Erdelić, T.; Carić, T. A Survey on the Electric Vehicle Routing Problem: Variants and Solution Approaches. J. Adv. Transp. 2019, 2019, 5075671.
- Savelsbergh, M. The vehicle routing problem with time windows: Minimizing route duration. ORSA J. Comput. 1992, 4, 146–154.
- Or, I. Traveling Salesman Type Combinatorial Problems and their Relation to the Logistics of Regional Blood Banking. Ph.D. Thesis, Northwestern University, Evanston, IL, USA, 1976.
- Lin, S. Computer solutions of the traveling salesman problem. Bell Syst. Tech. J. 1965, 44, 2245–2269.
- Fosin, J.; Carić, T.; Ivanjko, E. Vehicle Routing Optimization Using Multiple Local Search Improvements. Automatika 2014, 55, 124–132.
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; The MIT Press: Cambridge, MA, USA, 1992.
- Resende, M.; Ribeiro, C.; Glover, F.; Marti, R. Scatter Search and Path-Relinking: Fundamentals, Advances, and Applications. In Handbook of Metaheuristics; Springer: Cham, Switzerland, 2010; pp. 87–107.
- Dorigo, M.; Stützle, T. Ant Colony Optimization; The MIT Press: Cambridge, MA, USA, 2004.
- Marinakis, Y.; Marinaki, M. Bumble bees mating optimization algorithm for the vehicle routing problem. In Handbook of Swarm Intelligence. Adaptation, Learning, and Optimization; Springer: Berlin/Heidelberg, Germany, 2011; Volume 8, pp. 347–369.
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948.
- Marinakis, Y.; Marinaki, M. A hybrid genetic—Particle Swarm Optimization Algorithm for the vehicle routing problem. Expert Syst. Appl. 2010, 37, 1446–1455.
- Gendreau, M.; Potvin, J.Y. (Eds.) Handbook of Metaheuristics, 2nd ed.; Springer: New York, NY, USA, 2010.
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680.
- Černý, V. Thermodynamical Approach to the Traveling Salesman Problem: An Efficient Simulation Algorithm. J. Optim. Theory Appl. 1985, 45, 41–51.
- Glover, F. Tabu search—Part I. INFORMS J. Comput. 1990, 2, 4–32.
- Glover, F. Tabu search—Part II. ORSA J. Comput. 1990, 2, 4–32.
- Mladenović, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100.
- Lourenço, H.R.; Martin, O.C.; Stützle, T. Iterated Local Search: Framework and Applications. In Handbook of Metaheuristics; Gendreau, M., Potvin, J.Y., Eds.; Springer: Boston, MA, USA, 2010; pp. 363–397.
- Ropke, S.; Pisinger, D. An Adaptive Large Neighborhood Search Heuristic for the Pickup and Delivery Problem with Time Windows. Transp. Sci. 2006, 40, 455–472.
- Pisinger, D.; Ropke, S. A general heuristic for vehicle routing problems. Comput. Oper. Res. 2007, 34, 2403–2435.
- Mayer, T.; Uhlig, T.; Rose, O. Simulation-based Autonomous Algorithm Selection for Dynamic Vehicle Routing Problems with the Help of Supervised Learning Methods. In Proceedings of the 2018 Winter Simulation Conference (WSC), Gothenburg, Sweden, 9–12 December 2018.
- Jakobović, D.; Đurasević, M.; Brkić, K.; Fosin, J.; Carić, T.; Davidović, D. Evolving Dispatching Rules for Dynamic Vehicle Routing with Genetic Programming. Algorithms 2023, 16, 285.
- Jacobsen-Grocott, J.; Mei, Y.; Chen, G.; Zhang, M. Evolving heuristics for Dynamic Vehicle Routing with Time Windows using genetic programming. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; pp. 1948–1955.
- Gala, F.J.G.; Ðurasević, M.; Jakobović, D. Genetic Programming for Electric Vehicle Routing Problem with Soft Time Windows. In Proceedings of the Genetic and Evolutionary Computation Conference Companion (GECCO’22), Boston, MA, USA, 9–13 July 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 542–545.
- Gil-Gala, F.J.; Afsar, S.; Durasevic, M.; Palacios, J.J.; Afsar, M. Genetic Programming for the Vehicle Routing Problem with Zone-Based Pricing. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO’23), Lisbon, Portugal, 15–19 July 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 1118–1126.
More