Automotive chassis control technology plays a crucial role in ensuring the stability, performance, and safety of vehicles. This paper reviews and discusses automotive steering/braking/driving/suspension systems from perspectives of system composition, the state of the art, and key technologies. Detailed analysis is conducted on critical techniques related to system fault tolerance, road feel feedback, brake force distribution strategy, electric motors, and motor controllers.The development and application of automotive chassis control technology is in line with the goals and objectives for the advancement of the automotive industry in terms of innovation, safety, and environmental sustainability.
- steering by wire
- braking by wire
- driving by wire
- suspension by wire
1.Introduction
- Introduction
Automotive chassis control technology plays a crucial role in ensuring the stability, performance, and safety of vehicles. It encompasses a range of systems and components that work together to manage and optimize various aspects of a vehicle's dynamics, including suspension, steering, braking, traction, and stability control. These systems not only enhance the driving experience but also contribute to preventing accidents and improving overall vehicle safety [1].
With the advancement of autonomous driving technology, the implementation of autonomous driving functions relies on the coordinated cooperation of the perception layer, decision layer, and execution layer, thus posing higher demands on vehicle chassis that integrate all control functions in the execution layer. The wire-controlled chassis upgrades mechanical transmission control to wire-controlled, which meets the real-time, safety redundancy, high-performance, and intelligent requirements of autonomous driving technology in the chassis level for electrical signal transmission.
Throughout history, chassis control technology has significantly evolved. Initially, simple mechanical systems were used to provide basic suspension and steering functions. However, with advancements in technology, the sophistication and capabilities of these systems have increased exponentially. Today, automotive manufacturers employ diverse types of suspension systems, such as independent and active suspensions, to deliver superior ride comfort and handling performance[1] [2].
The steering system is another pivotal component of chassis control technology. Traditional steering mechanisms, such as rack and pinion systems, have been replaced by electric power steering (EPS) in modern vehicles. EPS offers improved precision, control, and fuel efficiency, making it an integral part of contemporary chassis control systems[2] [3]. Additionally, steer-by-wire technology is gaining attention, enabling electronic control of steering, further revolutionizing the driving experience.
One cannot overlook the significance of braking systems within the realm of chassis control. The braking system ensures the vehicle's ability to decelerate and stop safely. Traditionally, hydraulic braking systems have been used, but advancements such as anti-lock braking systems (ABS) and regenerative braking have been introduced. ABS prevents wheel lock-up during emergency braking situations, enhancing control and stability. Regenerative braking, commonly found in electric and hybrid vehicles, converts kinetic energy into electrical energy, increasing overall efficiency[3] [4].
Traction and stability control systems play a pivotal role in maintaining vehicle stability and preventing accidents. Traction control systems manage wheel slip during acceleration, ensuring maximum traction even on slippery surfaces. Electronic Stability Control (ESC) combines various sensors and control mechanisms to automatically detect and correct lateral skidding or loss of control[4] [5]. It is an essential safety feature in modern vehicles, significantly reducing the risk of rollovers.
Automotive chassis control technology encompasses various systems and components that work together to improve vehicle performance, stability, and safety. From suspension and steering to braking and traction control, each component plays a crucial role in ensuring a smooth and safe driving experience[5] [6]. With advancements in technology, the integration and communication between these components have become more sophisticated, promising even more exciting developments in the future.
The article provides a comprehensive review and discussion on automotive steering/braking/driving/suspension systems, analyzing their system composition, technological status, and key technologies. Firstly, it introduces fault-tolerant techniques in wire-controlled systems, including hardware redundancy and software redundancy. However, wireardware redundancy backup can improve system reliability, while software redundancy relies on fault-tolerant algorithms in the controller to increase system redundancy. These two types of redundancy techniques have strong complementarity, and this complementary design ensures that the system can maintain a high performance level when facing a fault, greatly reducing the risk caused by failures and providing strong support for improving the stability and reliability of wire-controlled chassis systems still face some chsystems.The article focuses on wire-controlled braking systems and introduces an optimized braking force distribution strategy to ensure vehicle safety and stability. This strategy not only improves braking efficiency but also enhances vehicle stability. In addition, it introduces the application of in-wheel motor drive systems in wire-controlled driving systems. This system can be flexibly placed on the wheels of electric vehicles and has the advantages of high integration and flexible driving. Motor controller technology using carbon silicon is suitable as a power semiconductor material, and although it currently faces the challenges. For e of high costs, its excellent thermal conductivity and electrical conductivity make it have broad application prospects in motor control systems.Furthermore, for wire-controlled suspension systems, key technologies include passive fault-tolerant control and active fault-tolerant control. Passive fault-tolerant control designs fixed fault-tolerant control laws in advance for predefined faults, resulting in relatively low implementation time and costs. Active fault-tolerant systems are based on FDD (fault detection and diagnosis), where a diagnostic unit detects and diagnoses faults when a system failure occurs. Control feedback or feedforward controllers then obtain appropriate fault-tolerant control laws to ensure the stability of the closed-loop system. The application of these two technologies greatly improves vehicle handling performance and ride comfort.
However, wire-controlled chassis systems still face some challenges. For example, the cost of hardware redundancy design and software redundancy design is relatively high, requiring a balance between reliability, cost, and performance. In addition, the safety and reliability of wire-controlled steering systems still need to be improved. Since wire-controlled braking systems rely on controllers to achieve system control, factors such as controller reliability, anti-interference, fault-tolerance, and real-time response between multiple control systems communication all have the potential to impact brake control. However, with the continuous development of technology, future wire-controlled chassis technology is expected to become more mature and reliable, making greater contributions to the development of the automotive industry.
2.Automotive Steering-by-Wire System.
- Automotive Steering-by-Wire System.
2.1. The State of the Art
As shown in Figure 1, the automotive steering system has gone through several stages including a mechanical steering system, hydraulic-power-assisted steering (HPS) system, electro-hydraulic-power-assisted steering (EHPS) system, electric-power- assisted steering (EPS) system, and a steer-by-wire (SBW) system [6,7][7,8]. The wire- controlled steering system eliminates the mechanical connection between the steering wheel and the steering wheel compared to EPS [8-13][9-14].
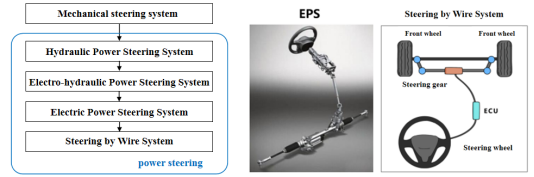
Figure 1. (left) The development of automotive steering system; (right) Concept of steering by wire.
Major automobile manufacturers and suppliers around the world have conducted in-depth research on wire -controlled steering systems, and internationally renowned suppliers such as TRW (TRW Automotive Holdings Corp), Delphi, and ZF have manufactured physical prototypes for experimental research. International famous automobile manufacturers such as Mercedes Benz, BMW, General Motors, etc. , exhibited a concept car with a steer-by-wire system. In the late 1960s, Kasselmann in Germanys started to develop steering-by-wire system. In 1990s, Benz initiated its study in front- wheel -steering study, and applied the steer by wire system on Concept Vehicle ”F400 Carving”. In 2000, BMW applied steering by wire in Concept Vehicle “BMW Z22”, and the steering angle was reduced to 160 degrees. In 2013, Infinity Q50 applied steer-by -wire technology, in which two motors and three inter-monitored ECU were utilized to realize steering. In 2017, Schneider in USA developed steering-by-wire system composed of a “silent steering wheel system” and “on-demand steering system”.At present, the research on the wire-controlled-steering system in China is gradually moving from theory to practice, and some progress has been made [14][15].
The wire-controlled-steering system is divided into three parts: the steering wheel module, the steering execution module, and central control unit (ECU) [15][16]. The steering wheel module includes components such as the steering wheel torque, angle sensor, road sensing motor, and its reducer [16][17]; The steering execution module includes components such as the linear displacement sensor, angle sensor, steering motor, and its deceleration mechanism; In addition, the wire-controlled-steering system also includes components such as a steering controller and power supply[17] [18].
The steering wheel module (i.e. steering wheel) is used to receive the driver's steering control; The steering wheel torque sensor and angle sensor are used to collect the torque, angle, and speed input by the driver through the steering wheel; The road sensing motor and its reducer provide the driver with road sensing information and output the return torque of the steering wheel.
The steering execution module includes various sensors, and the linear displacement sensor is used to collect the linear displacement signal of the steering actuator and convert it into a front wheel angle signal; The angle sensor is used to collect the angle information of the steering wheel; The steering motor and its deceleration mechanism are used to overcome steering resistance and drive the steering system to rotate through the corresponding angle; The gear rack steering gear is used to receive and amplify the output torque of the steering actuator motor, driving the steering wheel to turn.
The steering controller consists of multiple controllers. The steering wheel module controller collects relevant signals from the steering wheel module, receives target return torque signals, and sends control signals to the road sensing motor; The steering execution module controller is responsible for collecting relevant signals from the steering execution module, receiving target steering wheel angle signals, and sending control signals to the steering motor [18][19].
The wire-controlled-steering system shares a battery power supply with other electrical equipment in the vehicle. Currently, the mainstream power supply for the vehicle is 12V, and 48V will be the future development trend.
According to the number, arrangement position, and control method of steering motors, the typical layout of wire-controlled steering systems can be divided into five categories, namely single motor-front wheel-steering, dual-motor front-wheel steering, dual-motor independent front-wheel steering, rear-wheel wire-controlled steering, and four-wheel independent steering.
The dual motor front wheel steering arrangement has good redundancy and requires less power for a single motor. Infiniti Q50 adopts this arrangement, but the cost of parts in this form increases and the redundancy algorithm is complex.
The working schematic of wire-controlled steering is shown in Figure 2.When the driver turns the steering wheel, the angle displacement sensor converts the driver's intention into a digital signal, along with other signals of the vehicle, such as speed signals. Transmitted to the ECU through the bus, the ECU calculates the front wheel angle based on the set algorithm and transmits this signal to the steering motor to complete the steering. In addition, after obtaining the steering resistance information through the steering resistance sensor, the ECU transmits the magnitude of the return torque to the driver for road feel feedback based on the return torque algorithm.
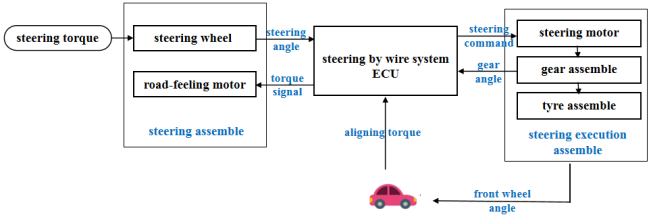
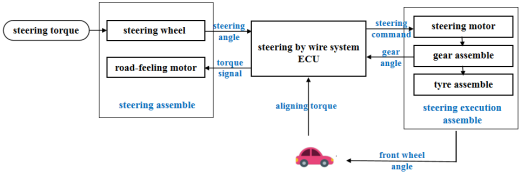
Figure 2. Schematic diagram of steering by wire.
3.Automotive Braking by Wire System
2.2. Key technologies
(1) Fault tolerance
The probability of faults such as open circuit of switch tubes, abnormal rotary transformer signals, and abnormal temperature sensors in the motor is high, which also has a significant impact on the system. Short circuits, open circuits, and mechanical faults in sensors have a significant impact on the system, but their occurrence frequency is not high [20-22]. Poor contact of connectors in the communication bus has a significant impact on the system and a high probability of occurrence [23].
Current fault-tolerant methods can be divided into two categories from a technical perspective: one is based on hardware backup redundancy technology, and the other is based on software fault-tolerant algorithm technology. The hardware redundancy method mainly improves the fault tolerance performance of the system by providing backup for important components and vulnerable components; The software redundancy method mainly relies on the fault-tolerant algorithm of the controller to improve the redundancy of the entire system, thereby improving the fault-tolerant performance of the system [24,25].
Hardware backup technology and software fault-tolerant technology are highly complementary; Hardware backup technology can enhance the reliability of fault-tolerant control technology at the hardware level; Software fault-tolerant technology can reduce the space and volume requirements of the steering system caused by hardware redundancy. The future wire-controlled steering system will be a highly intelligent system with both hardware backup and fault tolerance algorithms [26-28].
- Road feeling feedback
Due to the SBW system's inability to provide the driver with inherent steering feel, there is a risk of misoperation by the driver resulting in traffic accidents. Therefore, road feeling simulation technology is required to provide the driver with feedback information from the road surface. By obtaining feedback information about the road and steering wheel through the hand feel on the steering wheel, the driver can help complete driving tasks such as turning and lane changing. The resistance torque that the driver needs to overcome when turning the steering wheel mainly includes two aspects, namely, return torque and Friction torque, while the road sense feedback torque includes return torque and Friction torque. To enable the driver to experience a realistic road feel, the essence is to control the data and information from lower-level motors and sensors through upper-level road feel motors using appropriate strategies, simulating and transferring them to the steering wheel to provide the driver with feedback torque from the road surface and steering wheel realignment torque. The methods for obtaining feedback torque of road feel include parameter fitting, sensor measurement, and dynamic model-based methods, with the third being the mainstream of current research [29,30].Return torque control technology is an evaluation criterion for the quality of SBW systems and the basis for active steering research. The core issue in this research is how to improve the return torque to achieve the same effect as the power steering system.
Based on the dynamic model method, according to the vehicle dynamic response, driver steering wheel, input and other states, the vehicle dynamics model is used to estimate the tire return torque and the feedback torque to be compensated, and then calculate the expected feedback torque command [31].
The wire-controlled steering system has the advantages of improving handling stability, improving comfort, energy conservation, and environmental protection, improving passive safety, and facilitating vehicle lightweight. However, the safety and reliability of the wire-controlled steering system have always been the core obstacles hindering its implementation.
- Automotive Braking by Wire System
3.1. The State of the Art
At present, the main research on wire-controlled braking systems at home and abroad are Electronic Hydraulic Braking (EHB) systems, electronic mechanical braking (EMB) systems, and hybrid wire-controlled braking (HBBW) systems, among which the EHB system is the most mature and currently in mass production stage[19-22 [32-35].
Previously, the brake-by-wire system was mainly divided into three types: the first was the Electronic Hydraulic Brake (EHB) system, the second was the Electronic Mechanical Brake (EMB) system, and the third was the Hybrid Brake -by -Wire (HBBW) system[23-24] [36,37].
The EHB system is developed on the basis of traditional hydraulic braking systems, using a comprehensive braking system module (motors, pumps, high-pressure accumulators, etc.) to replace the pressure regulation system in traditional braking systems and ABS module that can generate and store brake pressure, and can separately adjust the braking torque of four tires via individual adjustment[25] [38]. The EMB system completely eliminates components such as brake fluid and hydraulic pipelines of traditional brake systems, and is driven by an electric motor. The brake generates braking force, which is truly a wire-controlled braking system. There is no hydraulic drive and control part in the EMB system, and the mechanical connection only exists between the motor and the brake caliper. The driving part transmits energy through wires and signals through data cables[26-27] [39-40].
The mainstream layout of the Hybrid Brake -by -Wire (HBBW) system is to use an Electronic Hydraulic Brake (EHB) system on the front axle and an Electronic Mechanical Brake (EMB) system on the rear axle;
The front axle adopts an EHB system to achieve single wheel braking force adjustment of the front wheel, while relying on the EHB installed on the front axle implement brake failure backup to meet safety and reliability requirements; The rear axle adopts an EMB system, which can reduce the length of the brake pipeline and eliminate the uncertainty caused by the excessively long pipeline during pressure control; on the other hand, it can make the electronic parking brake (EPB) more convenient and fast[28] [41].
The automotive Electronic Hydraulic Braking system (EHB) is mainly composed of a hydraulic control module, brake pedal module, control unit HCU, brake, various sensors, etc. [29][42]. The working process of the EHB system mainly involves controlling the pressure supply unit and the high-speed on-off valve, generating and storing brake pressure, and adjusting the brake torque of the four tires separately[30] [43].
The electronic mechanical braking system (EMB) for automobiles mainly consists of wheel brake modules, central electronic control units (ECU), brake pedal modules, communication networks, power supplies, and other components. The EMB system replaces hydraulic components with electronic components, which is an electro-mechanical integrated system. The system controls the current level of the brake motor through an electronic control unit, and clamps the friction discs from both sides through the brake clamps to achieve wheel braking.The key technologies that limit the mass production and application of EMB systems include redundant design and fault-tolerant control, clamping force control technology, reliability of brushless motors in complex environments, and innovative and miniaturized gearing mechanisms. Based on the vehicle dynamic control system of the EMB system, which is distinct from closed-loop control based on hydraulics, the development of an entirely new dynamic model and vehicle coordination control algorithm is necessary.Figure 3 presents the system architectures of EHB, EMB, and HBBW.

 (a) EHB system (b) EMB system (c) HBBW system
(a) EHB system (b) EMB system (c) HBBW system
Figure 3. EHB, EMB and HBBW system.
There are already some mature algorithms such as PID, SMC, MPC, etc., which have successfully helped the integrated line control system achieve power cylinder pressure control. Todeschini of the Polytechnic University of Milan and others proposed a position pressure hybrid switching power cylinder control strategy for the self-designed brake-by-wire system. In the position control mode, they quickly controlled the motor to rotate fully to overcome the brake system's idle stroke, and in the pressure control mode, they used variable parameter PID. The closed-loop control accurately adjusts the pressure of the power cylinder, effectively improving the pressure regulation rate of the active braking system of this configuration [44,45].
3.2. Key technologies
(1) Optimal distribution strategy of braking force
The purpose of braking force distribution is to calculate the braking forces of four wheel brakes based on the vehicle load, actual road conditions, and operating conditions at the moment when the driver presses the brake pedal, in order to ensure the safety and stability of the vehicle while obtaining the shortest stopping distance [46,47].
The relationship between the pedal displacement, pedal force, and brake pressure in the traditional hydraulic brake system can be inferred from the relationship between the pedal force and brake deceleration in the EMB system, and a relationship curve can be established.
Due to factors such as tire and road adhesion coefficient, the maximum ground braking force of the wheels should not exceed the adhesion force [48]. When the local braking force exceeds the adhesion force, the wheels may experience lock-up and slip, and there may be phenomena such as front wheel lock-up or rear wheel lock-up.
When a car brakes, the tires not only roll but also slide, and the magnitude of the slip rate is related to the coefficient of adhesion to a certain extent; In an ideal state, there is a linear relationship between the braking force of the front and rear brakes when a car brakes, but there may be some deviation in actual situations.
- System safety and fault tolerance
The application of EMB systems has always been greatly affected by safety and reliability, as the failure of any electronic signal may bring catastrophic consequences. Therefore, system safety and fault tolerance technology are particularly important, including software redundancy and hardware redundancy [49,50].
Considering the real-time performance and cost of the EMB system, the dynamic redundancy of hot backup is the best choice. Double redundancy design of the brake pedal module, ECU module, [31-32]communication network, and power module can effectively improve the reliability of the system [51].
The EMB system brake pedal module adopts a dual redundant structure, with two identical machines working simultaneously. The work results are compared, and output is based on the predetermined self-diagnosis strategy and fault judgment strategy.
4.Automotive Driving by Wire System
- 4. Automotive Driving by Wire System
4.1. The State of the Art
For internal combustion engine vehicles, the wire-controlled throttle system has replaced the traditional throttle system, and more than 99% of vehicle models on the market are equipped with a fuel-control door system. For new energy vehicles, the mainstream driving solutions currently include centralized motor drive and step-by-step motor drive, and the centralized motor drive solution has received a large number of applications, but is developing towards distributed motor drive represented by wheel edge and hub motors[33-36] [52-55].
The wire-controlled throttle system is composed of the throttle pedal, pedal displacement sensor, electronic control unit, data bus, servo motor, and throttle actuator. The drive-by-wire system consists of the electronic control unit (ECU), power converter, drive motor, mechanical transmission system, drive wheel, etc. [56]. The wire-controlled drive system structure for new energy vehicles is mainly divided into three types: centralized drive, central transmission drive, and distributed drive. At present, electric drive bridge technology, wheel edge deceleration drive, and hub motor direct drive technology are mainstream structures[37-39] [57-59].
The wire-controlled throttle is controlled by a cable or wire harness to control the throttle opening. On the surface, it replaces the traditional throttle cable with a cable, but in essence, it is not just a simple change in the connection method, but can achieve automatic control of the entire vehicle's power output[40-42] [60-62].
The driving control of pure electric vehicles is achieved through a control strategy program embedded in the vehicle controller. Based on the input signals of each sensor, the vehicle's operating conditions are determined and the target torque of the driving motor under each operating condition is determined[43] [63]. Then, the target value is sent to the motor controller (MCU) through CAN bus, and the motor controller controls the motor according to the received commands to ensure normal driving of the vehicle [64].
4.2. Key technologies
(1) Efficiency improvement of permanent magnet synchronous motor
To improve NVH performance, electric vehicle drive motors generally choose designs with multiple poles and high rotational speeds; Due to the higher rotational speed leading to higher iron loss, the loss control of ordinary silicon steel sheets in the high-frequency region is relatively weak. The loss can be reduced by reducing the thickness of silicon steel sheets [65,66].
The use of high-efficiency silicon steel sheets can reduce iron loss, but it is still necessary to optimize[44] the copper loss of the motor at low speed and high torque. One method is to use a card-issuing motor. The scientific name of the card-issuing motor is Hairpin motor, which is a type of flat wire motor with winding ends similar to the card- issuing motor. The card-issuing motor has low copper consumption and high efficiency. Currently, Toyota, and Dianzhuang have adopted the card-issuing motor scheme [67].
- Hub Motor Technology
The hub motor drive system can be flexibly placed in the wheels of various electric vehicles, directly driving the hub to rotate. Compared with traditional centralized driving methods such as internal combustion engines and single motors, its technical advantages and characteristics in power configuration, transmission structure, handling performance, energy utilization, etc., are extremely obvious[45] [68].
Hub motors are mainly divided into two types: outer rotor motors and inner rotor motors, with differences mainly reflected in the presence or absence of a reduction structure. The inner rotor hub motor and wheel edge motor converge in transmission structure, with the main difference being that the inner rotor motor is integrated with the hub, while the wheel edge motor is placed on the wheel edge[46] [69].The schematic diagram of the hub motor drive device is shown in Figure 4. Overall, the application of wheel hub motors has the advantages of high integration, flexible driving, and being in line with the development of intelligent vehicles and platform generalization applications[47] [70].
Material and process innovations may break through the constraints of electromagnetic load on motor volume in hub motors. Further research and development of high-permeability, low-loss magnetic materials, low-resistivity conductive materials, high-thermal conductivity insulating materials, and low-density, high-strength structural materials can reduce motor losses and mass, improve heat transfer within the motor, and increase power/torque density in hub motors. Innovations in motor processing will achieve low-loss, lightweight, and high-cooling-efficiency designs in motors based on existing materials through different process structures. In the future, motor design will no longer be a simple electromagnetic or structural design, but a true multidisciplinary design that pushes the limits of motor performance.
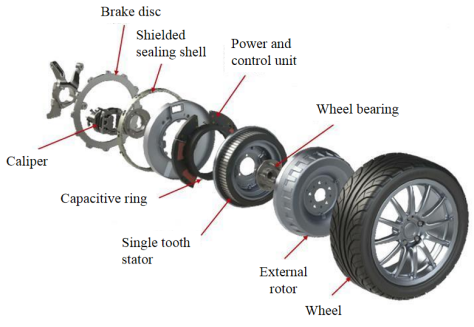
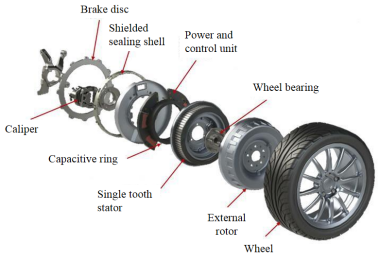
Figure 4. Schematic diagram of hub motor drive
5.Automotive
- Motor controller
Silicon carbide (SiC) is very suitable as a material for power semiconductors due to its strong bandgap, thermal conductivity, and insulation capabilities. It is easier to achieve low loss, high switching frequency, and high junction temperature compared to silicon (Si)-based devices, and the increase in temperature has little effect on switching loss [71]. Its good output characteristics are more suitable for traction conditions. Although the high cost is the main obstacle it faces, with the decrease in material prices and the improvement of production processes, SiC devices will reduce the cost of electronic control products in the dimensions of efficient operation, component savings, and chips [72-75].
Suspension by Wire System
- 5. Automotive Suspension by Wire System
5.1. The State of the Art
During vehicle driving and riding, handling and comfort are two important evaluation indicators, which are difficult to balance. Control by wire suspension is the process of automatically adjusting the height, stiffness, and damping of the suspension according to the actual road conditions to achieve precise control of the driving attitude[48] [76].
According to the actuator, from the perspective of technological maturity and equipment rate, air springs and CDC-type wire-controlled shock absorbers are the most common. The MRC shock absorber has good shock absorption effect and fast response speed[49-50] [77,78]. There will be good development space after the price drops in the later stage. Due to its strong substitutability, the necessity of equipping the wire -controlled anti-roll bar is relatively low.Figure 5 illustrates the basic structure of an air suspension system.
According to the degree of additional external force intervention, an automotive suspension system can be classified as follows: passive, semi-active, and full active. The cost of semi-active control is lower than that of full active control, its performance is close to that of a full active suspension system, and it has reliable fault state adaptability, which is the mainstream of the current market[51] [79]. With the improvement of the level of automatic driving and the access of various sensors, the popularity of full active suspension will increase day by day[52] [80].
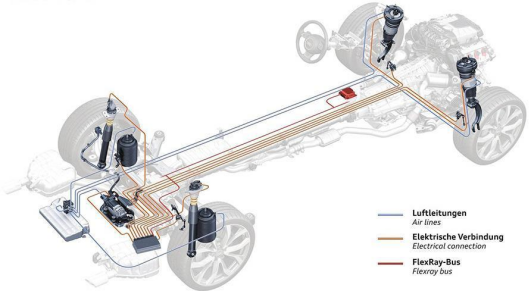
Figure 5. Basic structure of air suspension
The wire-controlled suspension system usually has two sets of information collection and control systems in parallel, and solving the control coupling of different systems under different road conditions is its control difficulty; The current mainstream control scheme is that the wire-controlled spring is generally adjusted in steady-state, and the wire-controlled vibration reduction is generally adjusted in real-time.
The wire-controlled suspension control system is a closed-loop adaptive control system that does not have an optimal solution. The core parameters need to be continuously calibrated during the calibration process based on simulation models and actual vehicle test results.
PID (proportional, integral, differential) control is the most widely used and mature control method in the control field, which is widely used in the active and semi -active suspension of vehicles[53] [81]. The adjustment of proportion (single adjustment amplitude), integration (elimination of static error), and differentiation (reflecting the trend of input signal change) parameters can be achieved through simulation testing and actual vehicle testing
5.2. Key technologies regarding fault tolerance
When the wire-controlled suspension system malfunctions, the parameters of Kp, Ki, and Kd set in the early stage of PID suspension are fixed values and cannot quickly adapt to changes. Therefore, a fault-tolerant mechanism is needed to perform gain and compensation processing on the control signal.
Passive fault-tolerant control mainly designs fixed and invariant fault-tolerant control laws for pre-known fault types, so that the system is not sensitive to preset faults (such as sensor failure) [82]. This method does not require pre-diagnosis of faults or real-time adjustment of control laws, and the implementation time and cost are relatively low.
The theoretical basis of active fault-tolerant systems is FDD (Fault Self-Test Feedback System). When a system malfunctions, the diagnostic unit detects and diagnoses it, and controls the feedback/feedforward controller to obtain appropriate fault-tolerant control laws, ensuring the stability of the closed-loop system. In the implementation process of active fault-tolerant control system, the system model is first established, and based on this, a system fault model is established: An FDD system is designed based on system characteristics, and then a fault-tolerant control law is designed based on compensation rules.
In addition to conventional chassis support and shock absorption, wire-controlled suspension has been extended to the driver's cabin and seat of commercial vehicles due to its good load adaptability and low natural frequency, greatly improving long-distance driving comfort and fatigue resistance. The wire-controlled suspension can meet the requirements of driving smoothness and vehicle handling under different working conditions. However, due to its complex structure, it has a certain negative impact on the failure rate, safety risks, and energy consumption of the entire vehicle.
6.Discussion
Chassis by wire technology, an advanced automotive technology that relies on an electronic control system to regulate the chassis of a vehicle, has the potential to enhance vehicle handling performance, comfort, and safety.
Through an introduction to the chassis by a wire system, the key technologies and development status of steer-by-wire steering, and braking, drive and suspension systems can be comprehensively reviewed, shedding light on the current state of each system and areas for improvement. To further develop the chassis steer-by-wire system, advancements may be made in the following areas:The security and reliability of steer-by-wire technology has long been a fundamental obstacle to its implementation, which can be improved through hardware redundancy and fault-tolerant algorithms. Future steer-by-wire systems are expected to be highly intelligent platforms that integrate hardware redundancy and fault-tolerant algorithms.With the evolution of technology and the continuous upgrading of vehicle control systems, steer-by-wire technology will gradually become the mainstream trend in the automotive industry. The application of emerging technologies such as artificial intelligence, vehicle networking, and autonomous driving will further enhance the intelligence of steer-by-wire systems.
The dynamic system of line control can be classified into EHB and EMB. It is expected that EHB will prevail as the mainstream scheme for a considerable period in the future, while EMB may encounter difficulties in commercialization in the short term due to issues such as redundancy and backup challenges.
Another prominent feature is the hub motor system, which has the distinct advantage of simplifying the vehicle architecture, increasing available space, and enhancing transmission efficiency, all while integrating the steering, braking, and drive functions into a single system. Additionally, in terms of suspension, it is flexible in adjusting the body height and stiffness of the suspension system to enhance vehicle passability or handling performance.
7.Conclusions
Automotive chassis control technology refers to the various systems and components that are responsible for controlling and managing the movement, stability, and performance of a vehicle's chassis. These technologies play a crucial role in ensuring the safety, comfort, and overall driving experience of a vehicle.
- Steering by wire: At present, the technology of steer-by-wire systems is mainly in the research and development stage. From the perspective of vehicle manufacturers, only the Infiniti Q50 has been equipped with this technology in mass production, and Pan Asia and Tongji University jointly carry out pre-research and development, without cooperation with component manufacturers. From the perspective of suppliers, Bosch, ZF Friedrichshafen, and other manufacturers are actively developing and making samples, but they have not been equipped in the whole vehicle. Bosch's line-control steering system adopts a dual-redundancy, full-backup scheme.
- Braking by wire: At present, the mainstream route for launching control technology in the market is the Electronic Hydraulic Brake (EHB) system, and there are already several mass-produced products, such as Bosch's iBooster and mainland's MK C1. The Electronic Mechanical Braking (EMB) system is still in the research and development stage due to its immature technology.
- Driving by wire: For traditional internal combustion engine vehicles, the drive-by-wire technology (throttle-by-wire) is currently widely used in passenger cars and commercial vehicles, with a market share of over 99%; For new energy vehicles, wire-controlled drive technology has been fully applied and is currently in the stage of centralized motor drive. With the improvement of electrification level, the future will develop towards distributed drive represented by wheel edge motors and wheel hub motors.
Suspension by wire: Although the wire-controlled suspension can automatically adjust the stiffness of the wire-controlled spring, body height, and shock absorber damping, it is currently a non-rigid configuration due to weight, cost, and reliability reasons, mainly equipped in C-class and D-class vehicles. Therefore, for vehicle manufacturers, the assembly priority of wire-controlled shock absorbers is the highest, followed by wire-controlled springs, and finally by wire-controlled anti-roll bars. In terms of development potential, wire-controlled air springs and, CDC/MRC type lines are possibilities. The future development prospects of controlled shock absorbers are relatively good.
Author Contributions: Conceptualization, A.Y.; writing—original draft preparation, A.Y.; writing—review and editing, Y.Z. Methodology—validation, L.X.; Supervision, L.L. All authors have read and agreed to the published version of the manuscript.
Funding: The authors acknowledge the funding from Zhejiang R&D Key Research Project(2022C04023).
Institutional Review Board Statement: Not applicable.
Informed Consent Statement: Not applicable.
Data Availability Statement: All data necessary is included in this manuscript.
Conflicts of Interest: The authors declare no conflict of interest./A.
References
- Tang, P.; Zhao, H.J.; Xu, Z. Current Situation and Trend of Wire-Controlled Chassis Control Technology Development. In Proceedings of SPIE—The International Conference onOptical Engineering, Nanjing, China, 24–27 November 2022; p. 12309.
- Chen, X.; Liang, D.; Wu, X.; Huang, L. Design and analysis of suspension guiding mechanism of independent steer-by-wire system. Tongji Daxue Xuebao/J. Tongji Univ. 2014, 42, 1567–1571.
- Fu, Y.; Zhang, L.; Wei, C.; Tang, P. Research and analysis of steering-by-wire system stability. Phys. Conf. Ser. 2021, 2121,012028.
- Hu, C., Pan, G., Kong, L., & Yu, J. (2023). Research of Brake by Wire System. Journal of Physics: Conference Series, 2479(1).
- Jian, L. Research status and development prospect of electric vehicles based on hub motor. In Proceedings of the China International Conference on Electricity Distribution, CICED, Tianjin, China, 17–19 September2018; pp. 126–129.
- Zhang, Y.; Lu, G. Research on Control Method of Four-Wheel-Independent-Driving System Based on X-by-Wire Chassis. Notes Electr. Eng. 2022, 769, 603–626.
- Wang, Y., Yang, J. J., & Mbiye, N. M. (2020). An automotive EHPS software reliability and testing. Proceedings - Annual Reliability and Maintainability Symposium, 2020-January.
- Irmer, M.; Degen, R.; Nubgen, A.; Thomas, K.; Henrichfreise, H.; Ruschitzka, M. Development and Analysis of a Detail Model for Steer-by-Wire Systems. IEEE Access 2023, 11, 7229–7236.
- Orizco, A.R.Evaluation of an Active Steering System; KTH Royal Institute of Technology,Sweden, 2004.
- Badawy, A.; Zuraski, J.; Bolourchi, F.; Chandy, A. Modeling and Analysis of an Electric Power Steering System; SAEInternational, United States Paper No.1999-01-0399; 1999.
- Mortazavizadeh, S.A.; Ghaderi, A.; Ebrahimi, M.; Hajian, M. Recent Developments in the Vehicle Steer-by-Wire System. IEEE Trans. Transp. Electrif. 2020, 6, 1226–1235.
- Isah, A.; Mohammed, A.; Hamza, A. Electric Power-Assisted Steering: A Review. In Proceedings of the 2019 2nd International Conference of the IEEE Nigeria Computer Chapter, NigeriaComputConf 2019,Zaria, Nigeria, 14–17 October 2019.
- Indrawanto Ayatullah, T.; Prayoga, R.A. On the Design of Electric Power Steering Control Unit. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology, ICEVT 2018, Surakarta, Indonesia, 30–31 October 2018; pp. 210–213.
- Zhang, Z.; Ge, Y.; Li, C.; Xu, P. Research on EPS Control Strategy Based on BAS Algorithm. In 2022 41stChinese Control Conference, CCC;IEEE Computer Society,Wuhu, China, 2022; pp. 5408–5413.
- Simionescu, P.A.; Hoeltgebaum, T.; Martins, D. On the Evolution of Automotive Steering Mechanisms. Mach. Sci. 2022, 118, 116–128.
- Hu, A. Development of the automobile steering system. Mech. Mater. 2011, 42, 272–275.
- Cheon, D.; Nam, K.; Oh, S. Design and Robust Control of a Precise Torque Controllable Steering Module for Steer-by-Wire Systems. IEEE Trans. Ind. Electron. 2022, 69, 13245–13254.
- Cong, Z.; Jian, X.; Iqbal, M.N. Review on automobile steering-by-wire system development. Mech. Mater. 2012, 130–134, 2194–2197.
- Salih, S.Y. Intelligent Performance, Architecture Analysis, Functional Safety Metrics of Automated Steering Systems for Autonomous Vehicles. In ProQuest Dissertations and Theses Global; ProQuest LLC: Ann Arbor, MI, USA, 2022.
- Peter, D. Electric Power Steering―The First Step on the Way to Steering by Wire; SAE International,Germany,1999-01-0401; 1999.
- Rath, M.; Kelly, M.; Kober, K.; Gulati, A. Optimum Design of a Steer by Wire System using Systematic System Engineering Approach; SAE International, United StatesPaper No.2008-01-1452; 2008.
- Mortazavizadeh, S. A., Ebrahimi, M., Ghaderi, A., & Hajian, M. (2021). Fault-tolerant control of steer-by-wire systems under voltage and current sensors faults. Electrical Engineering,103(1), 407– https://doi.org/10.1007/s00202-020-01087-3
- Kwon, B.-S. Fault-tolerant Control Strategy for Steer-by-wire Vehicles Using Rear-wheel Steering. Inst. Control. Robot. Syst. 2023, 29, 289–293.
- Shi, G., Qiao, P., Sang, D., Wang, S., & Song, M. (2023). Synchronous and fault-tolerance control for dual-motor steer-by-wire system of commercial vehicle. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering., 09544070231154961.
- Ewald, V.; Konigorski, U. Model-matching-control of a redundantly actuated steer-by-wire-system. In Proceedings of the CCTA 2020—4th IEEE Conference on Control Technology and Applications, Montreal, QC, Canada, 24–26 August 2020; pp. 194–200.
- Masaya, S.; Katsutoshi, N.; Shiro, N.; et al. A Study of Vehicle Stability Control by Steer by Wire System. AVEC 20002000,37,210-216.
- Stanton, N.A.; Marsden, P. From fly-by-wire to drive-by-wire: Safety implications of automation in Vehicles. Eng. 2001, 24, 35–49.
- Oh, S.W.; Yun, S.C.; Chae, H.C.; Jang, S.H.; Jang, J.H.; Han, C.S. The Development of an Advanced Control Method for the Steer-by-Wire System to Improve the Vehicle Maneuverability and Stability; SAEInternational, Hanyang Univ, Korea, Paper No. 2003-01-0578; 2003.
- Tajima, J.; Yuhara, N.; Sano, S.; Takimoto, S. Effects of Steering System Characteristic on Control Performance from the View Point of Steer-by-Wire System Design; SAE International,Japan,Paper No.1999-01-0821, 1999.
- Tian, J.; Tan, G.; Pan, X.; Cai, M.; Huang, C.; Yan, Y. Research on Road Sense Simulation and Stability Control of SBW System. In Proceedings of the 2021 China Automation Congress, CAC 2021, Beijing, China, 22–24 October2021; pp. 4065–4070.
- Liang, X.; Zhao, L.; Wang, Q.; Chen, W.; Xia, G.; Hu, J.; Jiang, P. A novel steering-by-wire system with road sense adaptive friction compensation. Syst. Signal Process. 2022, 169,108741.
- Wang, X.; Xie, X.; Wu, X.; Yu, T. Precise position tracking control based on adaptive neuron PID algorithm for automatic clutch driven by DC motor. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; IEEE: Toulouse, France,2008; pp. 1–
- Kim, J.; Choi, S.B. Design and modeling of a clutch actuator system with self-energizing mechanism. IEEE/ASME Trans. Mechatron. 2011, 16, 953–966.
- Line, C.; Manzie, C.; Good, M.C. Electromechanical brake modeling and control: From pi to mpc. IEEE Trans. Control. Syst. Technol. 2008, 16, 446–457.
- Liu, Y.; Li, B. Research on EHB System Algorithm and Controller Implementation of Energy Vehicle. Notes Electr. Eng. 2022, 827, 1232–1238.
- Xu, Z.; Gao, G. Research on EMB control strategy considering braking gap.In Proceedings of SPIE—The International Conference on Optical Engineering, Nanjing, China, 24–27 November 2022; p.
- Chen, Z.; Wu, J.; Zhao, J.; He, R.; Qi, S. Control Strategy for Accurate Adjustment of Braking Force in Hybrid Brake by Wire System.Qiche Gongcheng/Automot. Eng. 2018, 40, 457–464.
- Chen, Y.-C.; Tu, C.-H.; Lin, C.-L. Integrated electromagnetic braking/driving control of electric vehicles using fuzzy inference.IET Electr. Power Appl. 2019, 13, 1014–1021.
- Todeschini, F.; Corno, M.; Panzani, G.; Savaresi, S.M. Adaptive position–pressure control of a brake by wire actuator for sport motorcycles. J. Control. 2014, 20, 79–86.
- Todeschini, F.; Formentin, S.; Panzani, G.; Corno, M.; Savaresi, S.M.; Zaccarian, L. Nonlinear pressure control for bbw systems via dead-zone and antiwindup compensation. IEEE Trans. Control. Syst. Technol. 2016, 24, 1419–1431.
- Tamilselvan, S., Prakash, N., Sathyamurthy, R. (2023). Review of Comprehensive Survey on Recent Trends in Parking Brake System. In: Sethuraman, B., Jain, P., Gupta, M. (eds) Recent Advances in Mechanical Engineering. STAAAR 2022. Lecture Notes in Mechanical Engineering. Springer, Singapore.
- Jiang, J.N.; Wang, S.H.; Sun, W.B. Simulation and optimization of automatic transmission hydraulic control module.In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering, ICRAE 2017, Shanghai, China, 29–31 December 2017; pp. 243–247.
- Chen, L.; Chi, H.; Feng, Y.; Zhang, C. Research on New Automotive Electronic Hydraulic Brake System. Phys. Conf. Ser. 2020, 1605, 012020.
- Todeschini, F.; Corno, M.; Panzani, G.; Fiorenti, S.; Savaresi, S.M. Adaptive cascade control of a brake-by-wire actuator for sport motorcycles. IEEE/ASME Trans. Mechatron. 2015, 20, 1310–1319.
- Yong, J.; Gao, F.; Ding, N.; He, Y. Design and validation of an electro-hydraulic brake system using hardware-in-the-loop real-time simulation. J. Automot. Technol. 2017, 18, 603–612.
- Han, W.; Xiong, L.; Yu, Z. Braking pressure control in electro-hydraulic brake system based on pressure estimation with nonlinearities and uncertainties. Syst. Signal Process. 2019, 131, 703–727.
- Yong, J.W.; Gao, F.; Ding, N.G.; He, Y.P. Pressure-tracking control of a novel electro-hydraulic braking system considering friction compensation. Cent. South Univ. 2017, 24, 1909–1921.
- Qi, G.; Fan, X.; Li, H. A comparative study of the recursive least squares and fuzzy logic estimation methods for the measurement of road adhesion coefficient. J. Mech. Eng. 2023, 21, 1230–1246.
- Zhu, B.; Dang, R.-J.; Zhao, J.; Chen, Z.-C.; Sui, Q.-H.; Guan, H.; Lao, D.-X.; Liu, Z.-P. Fault-tolerant Control of Current Sensors in Redundant Electronic Braking System for an Intelligent Vehicle.Zhongguo Gonglu Xuebao/China J. Highw. Transp. 2023, 36, 249–260.
- Ji, Y.; Zhang, J.; He, C.; Ma, R.; Hou, X.; Hu, H. Constraint performance pressure tracking control with asymmetric continuous friction compensation for booster based brake-by-wire system. Syst. Signal Process. 2022, 174,109083.
- Wang, J. Su, G. Lu and G. Yang, "Decoupling Control for Aviation Dual- Redundancy Permanent Magnet Synchronous Motor with 0° Phase Shift," inIEEE Transactions on Energy Conversion, doi: 10.1109/TEC.2023.3291169.
- Vo-Duy, T.; Ta, M.C.; Nguyễn, B.H.; Trovão, J.P.F. Experimental Platform for Evaluation of On-Board Real-Time Motion Controllers for Electric Vehicles. Energies 2020, 13,6448.
- Wenwei, W.; Wei, Z.; Hanyu, Z.; Wanke, C. Yaw stability control through independent driving torque control of mid and rear wheels of an articulated bus. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 2947–2960.
- Guo, L.; Xu, H.; Zou, J.; Jie, H.; Zheng, G. A state observation and torque compensation-based acceleration slip regulation control approach for a four-wheel independent drive electric vehicle under slope driving. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 2728–2743.
- Aloeyi, E.F.; Ali, N.; Wang, Q. A Review of In-Wheel Motors for Electric Vehicle Propulsion. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, ITEC Asia-Pacific 2022, Haining, China, 28–31 October 2022. https://doi.org/10.1109/ITECAsia-Pacific56316.2022.9941742.
- Mao, X.; Wang, X.; Zhang, J.C.; Chen, K.; Zhao, J.; Zhang, Y. Design of Electric Orchard Vehicle Four-Wheel Steering Control System. Mater. Res. 2013, 753, 1966–1969.
- Goyal, A.; Thakur, A. An Overview of Drive by Wire Technology for Automobiles. In Proceedings of the 2019 International Conference on Automation, Computational and Technology Management, ICACTM 2019, London, UK, 24–26 April 2019; pp. 108–110.
- Yu, L.; Yuan, S. Integrated control performance of drive-by-wire independent drive electric vehicle. J. Metrol. Qual. Eng. 2019, 10,16.
- Song, S.; Sun, C.; Zheng, C.; Song, G. Research on pure electric vehicle driving motor. Phys. Conf. Ser. 2020, 1650,022108.
- Muton, N.; Nakauo, Y. Dynamics of Front-and-Rear-Wheel-Independent- Drive-Type Electric Vehicles at the Time of Failure. IEEE Trans. Ind. Electron. 2012, 59, 1488–1499.
- Chen, W.; Liang, X.; Wang, Q.; Zhao, L.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Eng. Pract. 2020, 101,104504.
- Leng, B.; Xiong, L.; Yu, Z.; Sun, K.; Liu, M. Robust Variable Structure Anti-Slip Control Method of a Distributed Drive Electric Vehicle. IEEE Access 2020, 8, 162196–162208.
- Xin, X.; Lu, X.; Yuye, H.; Guowen, T.; Zhuoping, Y. Vehicle Stability Control Based on Driver’s Emergency Alignment Intention Recognition. J. Automot. Technol. 2017, 18, 993–1006.
- Ren, L.; Zhou, J.; Shen, G. The active steering control of the independent wheelset with the hub motors. Zhongguo Tiedao Kexue/China Railw. Sci. 2010, 31, 77–83.
- Jin, X.; Yin, G.; Chen, J.; Chen, N. Robust guaranteed cost state-delayed control of yaw stability for four-wheel-independent-drive electric vehicles with active front steering system. J. Veh. Des. 2015, 69, 304–323.
- Mammar, S. Feedforward and Feedback Control for Vehicle Handling Improvement by Active Steering. IFAC Proc. Vol. 2001, 34, 125–130.
- Wang, P.; Fan, X.; Zhu, S. Overview of Key Technologies for Torque Ripple Suppression in Four-Wheel In-Wheel Motor Drive Electric Vehicles. Recent Pat. Eng. 2023, 17, 60–80.
- Cheng, X.; Chen, T.; Li, J.; Wang, J. Coordinated Control Method for Lateral Stability and Differential Power-Assisted Steering of In-Wheel Motor Drive Electric Vehicles. World Electr. Veh. J. 2023, 14,200.
- Yao, X.; Zhou, M.; Li, L.; Zhang, X.; Zhong, X.; Zeng, L.; Guo, C. Structural Design of Hub Motor Based on Bidirectional Excitation. Phys. Conf. Ser. 2023, 2468,012172.
- Liu, Z.-S. Optimum design and control research of direct drive hub motor. Smart Innov. Syst. Technol. 2018, 82, 244–254.
- Zhang, D.; Fan, T.; Wen, X.; Ning, P.; Li, L.; Tai, X.; Li, Y.; Duan, Z.; He, G.; Zhang, S.; et al. Research on High Power Density SiC Motor Drive Controller. Zhongguo Dianji Gongcheng Xuebao/Proc. Chin. Soc. Electr. Eng. 2019, 39, 5624–5634.
- Daher, N.; Ivantysynova, M. Yaw stability control of articulated frame off-highway vehicles via displacement controlled steer-by-wire. Eng. Pract. 2015, 45, 46–53.
- Krishna, S.; Narayanan, S.; Ashok, S.D. Fuzzy logic based yaw stability control for active front steering of a vehicle. Mech. Sci. Technol. 2014, 28, 5169–5174.
- Liu, M.; Hu, Y.; Yang, Y.; Zou, H.; Li, J.; Liu, B. Actual motor controller based on SiC power module. In Proceedings of the 2020 35th Youth Academic Annual Conference of Chinese Association of Automation, YAC 2020, Zhanjiang, China, 16–18 October 2020; pp. 579–583.
- Al-Badrani, H.; Feuersanger, S.; Pacas, M. (2018). SiC-VSI with Sinusoidal Voltages for an Enhanced Sensorless Control of the Induction Machine. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference, SPEC 2018, Singapore, 10–13 December 2018.
- Yao, Q.; Li, Q.; Du, Q.; Chen, S.; Wang, X.; Zhan, W.; Yin, S. Research on Trailing Arm Suspension System of Full X-by-Wire Control Chassis Based on Data Drive. Lixue Xuebao/Chin. J. Theor. Appl. Mech. 2022, 54, 1880–1895.
- Yang, P.; Ge, Y.; Liu, H.; Zeng, X.; Li, C. Joint Control of Semi-active Suspension Based on CDC Shock Absorber. In Proceedings of the 41stChinese Control Conference, CCC, Anhui, China, 25–27 July 2022; pp. 5396–5401.
- Kordonsky, W.I. Magnetorheological effect as a base of new devices and technologies. Magn. Magn. Mater. 1993, 122, 395–398.
- Tang, T.; Sha, S.; Pan, C.; Li, H. Sliding Mode Control of Vehicle Semi-active Suspension System Based on Magnetorheological Damper. Phys. Conf. Ser. 2023, 2459,012085.
- Kumar, S.; Medhavi, A.; Kumar, R. Modeling of an active suspension system with different suspension parameters for full vehicle. Indian J. Eng. Mater. Sci. 2021, 28, 55–63.
- Sousa, D.F.; Avila, S.M. Simulation of an active suspension using PID control. In Proceedings of the PANACM 2015—1st Pan-American Congress on Computational Mechanics, in Conjunction with the 11th Argentine Congress on Computational Mechanics, MECOM 2015, Buenos Aires, Argentina, 27–29 April 2015; 281–291.
- Du, D.; Li, Z. Passive fault-tolerant control for discrete parameter system. IET Power Electron. 2023, 16, 1969–1983.