1. Introduction
Channel coding offers protection by adding redundancy to the transmitted information bits through constraint relations to reduce the bit error rate (BER) when transmitted in an interference channel. It is an effective method to combat ISI in UWA communications. The following sections describe the mainstream coding schemes used in developing and researching UWA communication technologies, including fixed-rate and rate-compatible codes.
2. BCH and RS Codes
BCH codes, discovered by Bose, Ray-Chaudhuri, and Hocquenghem et al.
[1][31], are a class of cyclic codes constructed from polynomials in a finite field. The information bits of length
𝐾are encoded into a code word of length 𝑁 with a polynomial in the Galois field. The specific relationship can be expressed as:
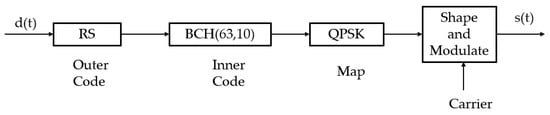
where the positive integers 𝑚≥3, 𝑡<2𝑚−1, and 𝑡 denote the number of codewords that can be corrected. It generally employs the bounded distance Berlekamp decoding algorithm. Due to the coding and decoding algorithm’s low complexity and the maximum–minimum distance property to avoid its error leveling problem at low error bit rates, it can be employed in systems with limited power consumption. In 1993, Widmer et al. [2][32] used a BCH-coded UWACS with 28 check bits added to the message bits to offer extremely reliable communications with an error bit rate of 0.013% in deep water, shallow water, convergence zones, and surface pipeline environments. This guided further development of the system’s error correction capabilities based on BCH codes. In 1999, LR LeBlanc [3][33] proposed a BCH-coded chirp frequency-shift keying (CFSK) modem for shallow sea UWAC, with BERs of 7×10−3 and 2×10−2 at about a 90 m communication distance and SNR of 46 dB and 44 dB, respectively, the feasibility of the BCH code in implementing the UWAC hardware system was verified. In 2001, Stojanovic M et al. [4][34] employed BCH (63, 10) as an inner code for concatenated RS-BCH-coded multiuser UWAC, as illustrated in Figure 16. The excellent performance of the four mobile users transmitting in severely reverberant environments with a bandwidth expansion factor of seven was verified.
Figure 16.
A concatenated coding method with the RS and BCH codes.
In 2008, Guo et al.
[5][35]. proposed a combination of spread spectrum technology and a BCH-coded code division multiple access (CDMA) UWACS for reliable communication between multiple robots. In 2010, Pompili D et al. introduced a BCH code to an UWAC network and investigated its energy consumption, throughput capacity, and cross-layer optimization
[6][36]. In 2016, Huang et al., for the security of UWAC networks, proposed a protocol that can generate secret keys dynamically based on the channel frequency response (CFR) in orthogonal frequency-division multiplexing systems; BCH codes are used for information reconciliation when the multibit quantization is carried out on the amplitude of each tone
[7][37]. In 2017, Barreto G. et al. improved the energy-efficient communication performance of UWAC networks through the combination and parameter optimization of the BCH and fountain codes. They found that the optimal parameter selection for channel coding is a function of the link distance and the received SNR
[8][38]. In 2021, Niemann E et al. employed the BCH-coded OFDM wideband underwater data communication system in a test tank, achieving zero-error data transmission with a transmission bandwidth of about 280 kHz and a rate of over 200 kbps, and successfully transmitted data over a distance of 200 m in shallow water
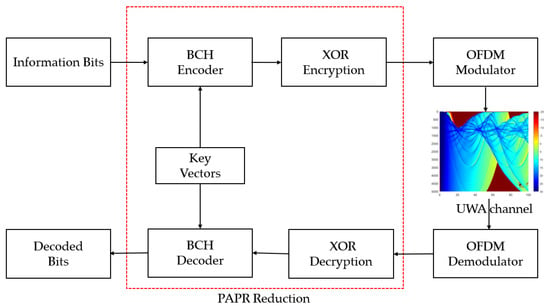
[9][39]. Murad M et al. combined BCH codes and XOR ciphering for PAPR reduction of OFDM signals and secure communication, as shown in
Figure 2 [10]7 [10]. They also employed BCH (31, 6)-coded GFDM for UWA communication with a low BER.
Figure 27.
A BCH-coded OFDM UWACS. (red box represents the channel codes employed by the system).
It is worth mentioning that Reed–Solomon (RS) codes allow non-binary coding belonging to the BCH family class, which is very effective in dealing with ISI caused by burst errors. Its main attraction is its efficiency increases with the code length
[11][40]. RS codes
(𝑛,𝑘,𝑡) are cyclic codes, built from
𝑛 symbols with a maximum of
𝑛=𝑞−1, where
𝑞 is the number of elements in the Galois field (
𝐺𝐹𝑞 and
𝑞=2𝑛).
𝑡 is the symbol for power-correcting code, so the number of control symbols is
2𝑡, and the number of information symbols that can be transmitted is
𝑘=𝑛−2𝑡; the difference with BCH codes is the Hamming distance:
𝑑≥𝑚1×2𝑡−1, where
𝑚1 is the number of bits carried by each coded symbol. The soft decoding process also uses the Berlekamp and Chien algorithm to correct received symbols
[11][40]. In 2008, ref.
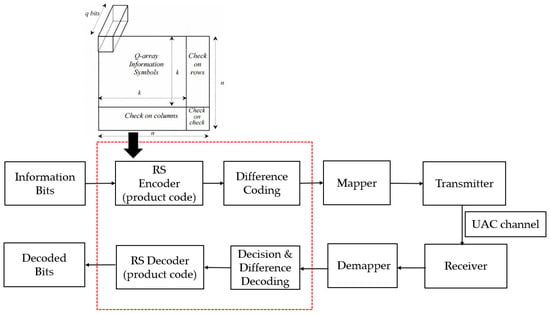
[12][41] developed the UWAC platform TRIDENT (TRansmission d’Images et de Donnes EN Temps réel) to transmit text, images, etc., and the system was tested for its performance using RS codes. As shown in
Figure 38, in 2010, the team improved the channel decoding efficiency by combining RS and turbo codes. It tested 300 m, 1000 m, and 2500 transmission distances, three carrier frequencies, and different bit rates, significantly improving system performance compared to RS codes alone
[13][42].
Figure 38.
The UWAC platform TRIDENT and the RS coding scheme.
In 2012, Nie X et al. proposed an UWA communication scheme that combines time-reversal processing techniques with RS codes. It effectively reduces ISI and burst errors caused by multi-path effects with reasonable complexity
[14][43]. In 2013, Esmaiel H et al. proposed a high-speed, low-BER underwater image transmission based on RS codes, HQAM modulation, and a ZP-OFDM system without equalizer over a 5 km transmission distance, 40 m water depth, and 8 m/s relative motion speed between the transmitter and the receiver in a simulated environment
[15][44]. In 2014, Diamant R et al. proposed to combine rate-compatible RS codes and the incremental redundancy hybrid automatic repeat request (IR-HARQ) protocol in Haifa port to achieve UWACS performance in terms of throughput and transmission power consumption that is superior to fixed-rate coding schemes
[16][45]. In 2018, Khanai R et al. compared the performance of IDMA-OFDM-MIMO with RS and turbo coding and found that RS codes have higher BERs than turbo codes but consume less power
[17][46]. In 2021, Sklivanitis G et al. found that a suitable combination of channel characteristics and RS codes can securely generate 256-bit encryption keys. The effectiveness of RS codes for UWA physical layer secure applications was verified
[18][47].
In summary, this section reviewed the research of BCH and RS codes applied in UWACSs in chronological order. They both have the advantage of low complexity and can be considered when designing real-time UWACS hardware. BCH codes are effective in reducing the PAPR of OFDM, and RS is very effective in reducing the burst error, which can further improve the performance of UWACSs when combined with different symbol mapping techniques, equalization algorithms, and feedback strategies. Moreover, they have also played a role in the security of the physical layer of UWAC. However, their shortcomings are their flexible code rates and lengths and poor performance compared to the codes in recent years.
3. Convolutional Codes
The convolutional codes proposed by Elias in 1955 are described by
(𝑛,𝑚,𝑘), where
𝑘 is the information bits,
𝑚+1 is the constraint length,
𝑛 is the code length after coding, and the code rate is
𝑅=𝑘/𝑚 [19][48]. The error-correcting ability of convolutional codes increases with
𝑚 and
𝑘, but the complexity of the commonly employed decoding Viterbi and BCJR algorithms increases with
𝑚 [20][49]. Its application in UWACSs can be traced back to 1989, when Catipovic J et al. developed an acoustic telemetry system, a hardware system using convolutional codes and the MFSK modulation, which operated reliably with a power efficiency of 0.01 Joule/bit in deep and shallow water over a transmission distance of 5 km
[21][50]. In 1990, Catipovic J A et al. further demonstrated that the sequential decoding of long-constrained convolutional codes allows for reliable data telemetry in UWA channels, with an SNR of 14 dB
[22][51]. In 1997, Lam W K et al. employed a convolutional code with a code rate of 1/2 and a constraint length of 7 to combine with the OFDM modulation. Their simulation results demonstrated the excellent BER performance of the coded OFDM with high selective time-frequency and a very low SNR of −9 dB under frequency domain equalization, verifying the advantages of convolutional coding followed by OFDM in UWA communication
[23][52]. In 1998, Stojanovic M et al. combined convolutional codes, interleaving, and spread spectrum techniques to improve UWACS performance
[24][53]. In the same year, Wei-Qing Z et al. used convolutional codes, MFSK, and Viterbi decoding algorithms on AUVs to achieve BERs between
10−4 and
10−5 at transmission rates of 2.5 ks/s and 5.0 ks/s under QPSK modulation in an UWAC test area with a transmission distance of 100–4000 m
[25][54].
In 2001, Blackmon F et al. fed the soft output of a convolutional code back into the DFE to achieve iterative equalization, which improved receiver performance
[26][55]. In 2013, Park J et al. evaluated the effectiveness of code-rate 1/2 convolutional codes in UWA channels. They demonstrated that CC leads to the same Eb/No gain as the theoretical value if the frequency selectivity index is less than about 2.0
[27][56]. In 2015, de Souza F et al. studied FSK modulation and convolutional codes for UWA sensing networks. They showed that the code rate significantly impacts the overall energy consumption and lifetime of UWAC, suggesting the importance of rate-compatible convolutional codes
[28][57]. In 2016, de Souza F A et al. investigated the impact of using different convolutional codes with rates ranging from
𝑟=0.125 to 0.917 for encoding the multi-hop UWAC, verifying the importance of wide code rates in optimizing the system’s energy consumption
[29][58]. In 2018, Behgam M et al. investigated the effectiveness of the full tail bite (FTB) convolutional code as applied to an UWACS with data blocks of 12, 25, 32, 64, and 512 short packet lengths
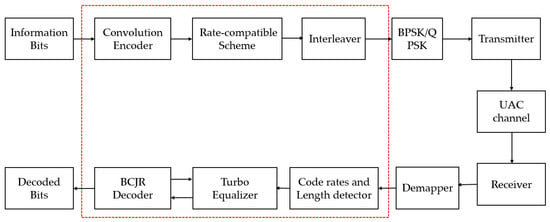
[30][59]. As shown in
Figure 49, in 2019, Lee H S et al. investigated convolutional coding with code rates of 1/2 and 1/3 and different code lengths in combination with turbo equalization to improve the spectral efficiency and environmental adaptability of UWACSs
[31][60].
Figure 49.
The structure of the convolutional-coded AMC transceiver model.
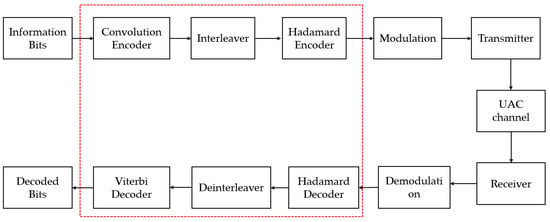
Figure 510 depicts a channel-concatenated coding scheme, which was developed in 2022. Channel-concatenated coding was employed to reduce multi-path interference and was designed as iterative joint decoding. The channel-concatenated coding consists of a Hadamard code and a convolutional code. Accordingly, the iterative joint decoding uses a joint Hadamard–Viterbi soft decoding framework and a newly designed branching metric using the Hadamard structure
[32][61].
Figure 510.
A channel-concatenated scheme with convolution and Hadamard coding.
In 2023, Wang J et al.
[33][62] found that to improve the security of an underwater network, the hash function must be used to authenticate the identity of the legitimate node, and after successful authentication, the measurements of the two communicating parties to be authenticated are obtained via convolutional coding, and the interleaving technique is employed to eliminate the redundancy of the measurements, which effectively reduces the BER of the key. Convolutional codes have been shown to encompass significant advantages in terms of key security and robustness.
In summary, the application of convolutional codes in UWACSs accompanies the development of UWAC technology innovation from the initial fixed code rate hard decoding to soft decoding combined with DFE, turbo equalization, and then the design of the rate-compatible code UWACS to adapt to the environment, combined with other codes to improve the performance of coding and decoding on short packets, and verified the effectiveness in the security of underwater acoustic networks.
4. Turbo Codes
In 1993, turbo codes were proposed by C. Berrou et al. by introducing stochastic interweavers into the encoder, parallel cascaded component-wise convolutional encoders, and iterative maximum likelihood decoders. For large blocks, turbo codes are capable of performing within a few tenths of dB from Shannon’s limit
[34][63]. It is revolutionary in coding theory and promotes the development of iterative signal processing. It is worth noting that the resulting turbo equalization further improves the anti-interference capability of UWAC receivers, which is a milestone in their development
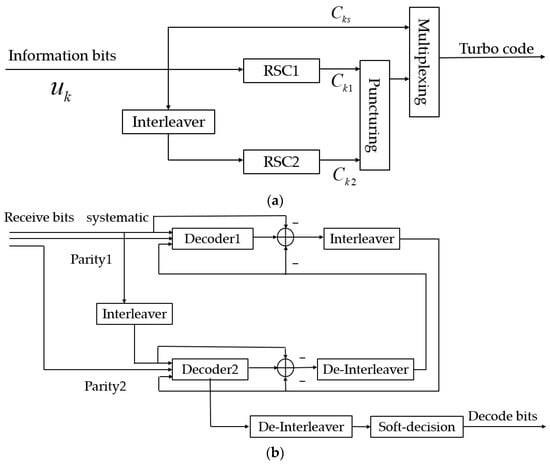
[35][36][64,65]. The structure of a typical turbo encoding and decoding process is shown in
Figure 611.
Figure 611.
Encoder and decoder of a turbo code. (
a
) Encoder. (
b
) Decoder.
The encoder consists of two parallel encoders, usually recursive systematic convolutional codes with feedback paths (RSC); the interleaver is pseudo-random, whose purpose is to modify the distribution of the code weight and to reduce the correlation of the sequence of information before and after the comparison. It is related to the performance of the whole code. The puncturing process changes the code rate by periodically deleting a number of parity bits. The turbo decoder must interpolate the punctured check bits. It is then fed into a series of convolutional decoders, which iteratively replace the soft decision bits of the decoded outputs to reduce uncertainty and improve overall decoding accuracy as the number of iterations increases. Finally, the decoder produces a soft decision to each message bit in logarithmic form known as a log likelihood ratio (LLR). Typical decoders include SOVA, MAP, Log-MAP, Max-log-MAP, and so on
[37][66]:
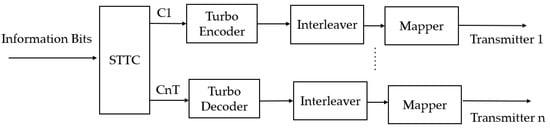
where 𝑢˜𝑘 is the decoded bit, and 𝐿𝑎(𝑢˜𝑘) is its log likelihood ratio; the soft decision decoded output is the basis of the iterative equalization for the UWAC receiver. In 2001, Proakis J G. et al. proposed a turbo-coded DFE modem. They demonstrated that the joint decision feedback equalization and turbo decoding are more robust than the turbo equalizer in an UWA sparse channel scenario, thus verifying the feasibility of the turbo code in an UWACS [38][67]. In 2005, Huang J et al. employed a coded OFDM system with a 1/2 code rate turbo code, which achieved data rates of 9 kbps and 2.8 kbps with BERs lower than 10−4 at distances of 5 km and 10 km, respectively [39][68]. As shown in Figure 712, in 2007, Roy S et al. proposed layered space–time coding with a wide range code rates of turbo codes, achieving very high spectral efficiencies in a system with many transmit antennas [40][69].
Figure 712.
Layered space–time coding with turbo encoder.
In 2008, Qiao G et al. compared turbo and convolutional codes with different code rates under different modulations and SNRs via simulation and demonstrated the superior performance of turbo codes under the UWA channel
[41][14]. Since then, Labrador Y et al. investigated the performance of turbo codes combined with higher-order modulation (8 PSK and 16 QAM) under Rician multi-path fading channels. This system’s performance was further improved by combining it with a DFE equalizer
[42][70]. As shown in
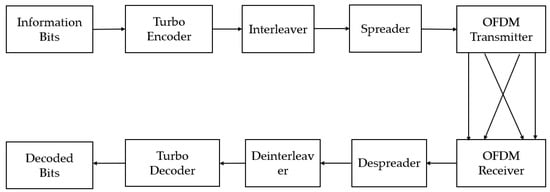
Figure 813, in 2015, Iruthayanathan N et al. introduced the turbo code in MIMO-OFDM systems, which combines iterative decoding with Log-MAP and a non-linear detector with MMSE-OSIC to mitigate the effects of ISI and acoustic interference effectively and to achieve higher data rates
[43][71].
Figure 813.
The turbo-coded MIMO-OFDM system.
In 2018, Bocus M J et al.
[44][72] employed 1/3 code rate turbo-coded NOMA-OFDM and NOMA-FBMC systems for a two-user scenario, where both users use the same frequency bandwidth to achieve reliable real-time video transmission between ROVs. Later, the team employed 1/2 code rate turbo-coded OTFS to achieve up to 198.7 kbps between every ROV in the same bandwidth under time-varying UAC over a 1 km vertical UWA channel
[45][73]. In 2022, Minaeva O N et al. proposed a product turbo encoder; the information is encoded line by line using the first encoder, and after interleaving, column by column using the second encoder. Combined with OCDM modulation, its performance outperformed conventional convolutional coding structures
[46][74]. Yang Y et al.
[47][75] designed a high-speed OFDM UWACS based on turbo codes, implemented a fully parallel turbo decoder on an FPGA, and detailed the hardware implementation of the decoder, the design of the algorithmic processing unit, and the interleaving module. In the same year, Jeong H W et al.
[48][76] proposed non-coherent turbo-coded FSK for an efficient receiver structure in combination with spread spectrum technology for high-performance underwater covert communications.
In summary, the research of turbo codes in UWAC ranges from combining single-carrier to multi-carrier communication, optimizing and modifying the coding structure, designing rate-compatible codes to improve coding efficiency, and trying to realize real-time data transmission on the hardware system. More importantly, turbo equalization has significantly contributed to the UWA reducing ISI while combined with DFE, which has always been a research hotspot in designing a robust receiver.
5. LDPC Codes
LDPC codes were initially introduced by Gallager in 1962. It was rediscovered in the 1990s, when researchers began to investigate code-on-graph-based and iterative decoding
[49][77]. The performance of non-regular LDPC codes with iterative belief propagation (BP) decoding of a long code length is very close to the Shannon limit. In addition, it can be implemented in hardware for parallel decoding that is rate compatible and has been adopted for data channels in 5G communications, in which two base graphs are designed for the LDPC coding scheme. BG 1 is employed for high data rates and long code lengths; BG 2 is employed for low and short code lengths
[50][78]. LDPC is represented by
(𝑁,𝐾), where
𝐾 is the information bits, and
𝑁 is the coded code length, which is encoded by a generator matrix (
𝐺) and a sparse parity check matrix (
𝐻). Assuming that the parity check matrix
𝐻 (3,6) is as in Equation (3):
Gaussian cancellation of
𝐻:
𝐻=[𝐼|𝑃𝑇]; then, the generator matrix is
𝐺=[𝑃𝑇|𝐼]. The encoded bits are:
𝐶=𝑢𝐺 and
𝐶𝐻𝑇=0;
𝑢 denotes the information bits. However, since
𝐺 is a non-sparse matrix, this encoding method has high complexity. Therefore, geometric construction methods
[51][79], stochastic construction methods
[52][80], and QC-LDPC
[53][81] have been developed. It is worth mentioning that the Tanner graph, to represent
𝐻, is the basis for the rediscovery of LDPC codes and an important method for the optimal design of iterative decoding schemes
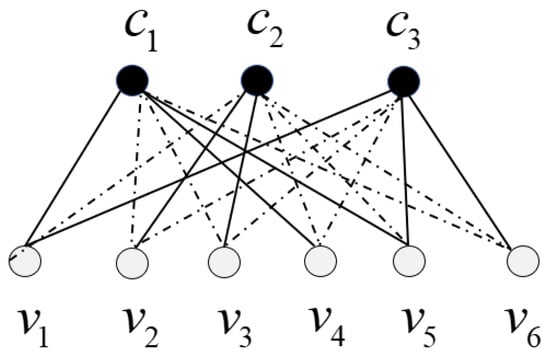
[54][82]. For example, the Tanner graph representation of Equation (10) is as follows:
The solid circles in
Figure 914 are the parity check nodes, and those in the hollow circles are the variable nodes. The variable nodes connected to a parity check node satisfy the relation, e.g.,
𝑐1=𝑣1+𝑣4+𝑣5. In the design of LDPC codes, the existence of short cycles should be avoided as much as possible so that the minimum length of the cycles is greater than four. The decoding algorithms for LDPC codes are based on Tanner graphs. The most classical one is the BP decoding algorithm, which is an iterative algorithm that uses the log likelihood probability as a message to pass between the nodes until
𝐻𝑢˜𝑘=0 or it reaches a pre-set number of decoding iterations, and
𝑢˜𝑘 is the decoded output. It has superior performance but high complexity
[55][83]. In 2007, Li, Baosheng et al. introduced a regular LDPC cycle code over GF (64) with a 1/2 code rate into a MIMO-OFDM UWACS; with a 12 kHz bandwidth, the overall data rate was 12.18 kbps, and its performance was found to be much better than that of a convolutional code with the same code rate
[56][84]. Notably, as shown in
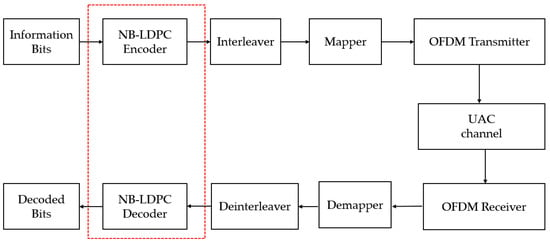
Figure 105, in 2008, Huang J et al. developed a new method for constructing non-binary regular and irregular LDPC codes, which solved two major problems in OFDM: (1) the poor performance of regular (or uncoded) OFDM in fading channels; and (2) the high peak-to-average power ratio (PAPR) for OFDM transmissions, confirming that the proposed non-binary LDPC codes have the multicarrier UWACS
[57][15].
Figure 914.
Tanner graph of the parity check matrix.
Figure 105.
Non-binary LDPC-coded OFDM system.
In 2009, Chen Y et al. derived the probability density function (PDF) of the initial decoded message of the BP algorithm for LDPC codes based on the shallow sea channel model. The effects of multi-path, channel fading, and interleaver on the decoding performance were simulated and analyzed, and their performance was found to be superior to turbo codes
[58][85].
Kang T et al. proposed an iterative LDPC-coded OFDM receiver with CFO and channel estimation, using EXIT charts to optimize the iterative processing between the pilots and the data, and simulations and shallow sea experiments proved the effectiveness of the LDPC code combined with an iterative receiver
[59][86]. In 2012, Qi X K et al. proposed a construction scheme for reversible quasi-cyclic-low-density parity-check (QC-LDPC) codes, which solves the problems of singular parity-check matrices and the high coding complexity in the traditional QC-LDPC codes. The proposed construction outperformed random LDPC in UWAC when the code length was short, and simulations showed that the reversible QC-LDPC code dynamically improved the system’s robustness
[60][87]. In 2013, Tao J et al. introduced LDPC and turbo equalization into a MIMO-OFDM UWACS. They experimentally investigated the selection of the number of subcarriers, iterations of turbo equalization, and LDPC decoding to achieve a trade-off between complexity and performance
[61][88]. In 2014, Chen Y et al. proposed a dynamic coded cooperation (DCC) scheme based on non-binary rate-compatible LDPC-coded OFDM modulation. Simulations and sea tests were carried out to demonstrate the real-time operation of OFDM-DCC in a three-node network
[62][89]. In 2016, Song A et al. proposed the iterative exchange of soft information between a LDPC decoder and a DFE. Using differential evolutionary techniques, they developed an EXIT-assisted method for optimizing LDPC codes for UWA channels
[63][90]. In 2017, Li D et al. proposed a concatenated code based on non-binary LDPC codes and Hadamard code for a non-coherent UWACS, and simulation and experimental studies found that there was a 0.4 dB gain after the concatenation of the two codes, which verifies its advantages in practical applications
[64][91]. In 2020, Padala S K et al. investigated the performance of a spatially coupled (SC) LDPC code based on the protograph for shallow water UWA communication with a communication distance of 1000 m and a channel bandwidth of 10 KHz via simulation. The results showed that the SC-LDPC code improved the performance by 1 dB over the LDPC code with the same delay constraints and a BER of
10−3[65][92]. In 2021, Wei X F et al. employed QC-LDPC, combined with spread-spectrum and higher-order modulation techniques, and decoded using log likelihood ratio belief propagation (LLR-BP) to ensure that the system operated reliably under low SNR conditions
[66][93]. In 2023, Zhao Z et al. addressed the problem that the decoding time of LDPC codes needs to be shorter, leading to inefficient communication and being unsuitable for short-block data transmission.
As Cshown in Figure 16, combining the short-block LDPC code with the direct sequence spread spectrum and soft spread spectrum in the UWACS solves the problem that the traditional LDPC code is not applicable, and the simulation tests and pool experiments were verified
[67][94].
In summary, this section reviewed the research of LDPC codes in UWA communication from the initial application research and validation of regular LDPC codes combined with different modulations. Then, introducing non-binary LDPC codes into a MIMO-OFDM UWACS was able to improve system performance and reduce OFDM’s PAPR. The research on the rate-compatible scheme of the LDPC code, which develops the design of the QC-LDPC code with low coding and decoding complexity, flexible code rates and lengths, and its effectiveness in the UWACS, was fully verified; in addition, the concatenation of LDPC codes and other codes can further improve the system’s BER performance. Due to the demand for UWACSs for short-block data transmission and the high complexity of LDPC decoding, the current research mainly considers reducing the decoding complexity and improving the performance on short-block data.
6. Polar Codes
In 2009, Arikan E introduced a low-complexity coding method based on channel polarization, which employed successive cancellation (SC) decoding with complexity
𝑂(𝑁log𝑁) and infinite code length, which was mathematically proven in the binary-input discrete memoryless symmetric channel (B-DMC) to be able to reach the Shannon capacity limit
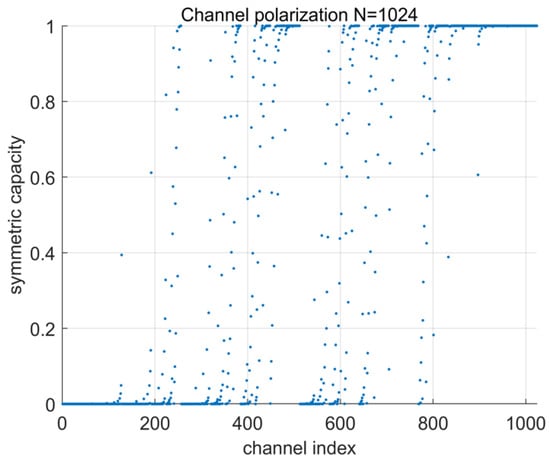
[68][96]. The polar code is constructed using channel polarization by making
𝑁=2𝑛 independent copies of a given channel (
𝑊). After channel merging and splitting, the capacity of
𝑊 converges to one and zero, as shown in
Figure 117. The information bits are then transmitted on the sub-channels with a channel capacity of one, and the bits (freeze bits) that are known to both the transmitter and the receiver are placed on the sub-channels with a channel capacity of zero.
Figure 117.
Channel polarization with
N
= 1024.
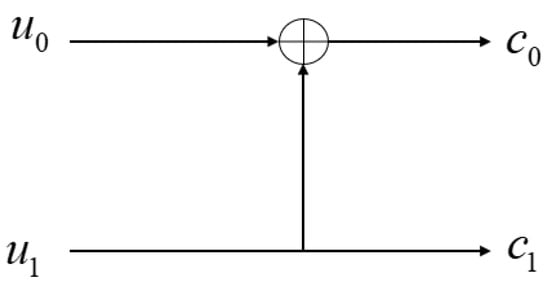
The polar code is denoted by (𝑁,𝐾), where 𝑁 is the coded code length, 𝐾 is the information bits, and 𝑁−𝐾 is the freeze bits. The fundamental element of the code construction is shown in Figure 128.
Figure 128.
Basic element for constructing the polar code.
The polar code can be mathematically expressed as:
The construction of the polar code of code length 𝑁=2𝑛
can be obtained using 𝑛 Kronecker products of the basic element as follows:
where 𝐵 is the bit reversal permutation matrix. After constructing code 𝐶, it is necessary to determine the index of the information and frozen bits. Usually, there are Bhattacharyya parameter, Gaussian approximation, density evolution, Monte Carlo [69][97], polarization weight (PW), etc., methods available. It is worth mentioning that Huawei proposed the PW, a sub-channel reliability assessment method independent of channel characteristics, which is suitable for constructing polar codes for dynamic UWA channels [70][95]. In polar code decoding with successive cancellation (SC) decoding, which requires sufficiently large code lengths, the block error probability decays exponentially in the square root of the code length. The recursive nature of the SC decoding may impose a large latency depending on the implementation. A major improvement in decoding performance can be achieved using successive cancellation list (SCL) decoding, which keeps a list of most likely decoding paths at all times, unlike the SC decoder, which only keeps one decoding path; that is, it performs a symbol-wise hard decision at each decoding stage. A significant improvement to SCL is the cyclic redundancy check (CRC)-aided SCL (CA-SCL), where the message is encoded with a CRC and then polar coded [71][98]. So far, CRC-SCL is currently the outstanding decoding method for polar codes.
In 2019, Qiao G et al. employed a rate-compatible polar code to create a nested code structure, which was divided into several subsets (codebook). Each user assigns an independent codebook without successive interference cancellation (SIC) to improve the utilization efficiency of OFDM subcarriers. Simulations and tank experiments verified the effectiveness of the polar codes for OFDM multiuser UWAC
[72][99]. As shown in
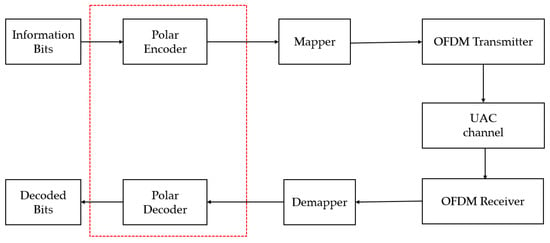
Figure 139, in 2020, Zhai Y et al. investigated the performance of polarization coding in an OFDM-UWACS both theoretically and simulatively. The simulation results revealed that the BER of polar codes with a code rate of 1/2 can reach
10−4~10−5 in underwater time-varying channels with a SNR of 4 dB, which is about 0.5–1 dB higher than that of LDPC codes and turbo codes. In addition, the BER performance of polar codes was compared with different UWA channel models and parameters, code lengths, and code rates, and the validity of the polar codes for the UWA channel was verified
[73][100].
Figure 139.
A polar-coded OFDM-UWACS.
Meanwhile, Falk M et al. compared the performance of mainstream code words in short-block data for UWAC in the competition “Wanted: Best channel codes for short underwater messages”. In addition, non-binary polar codes were studied and found to have the best performance, effectively promoting polar codes’ application in UWACSs
[74][101]. In 2022, Zhou C et al. proposed a joint source and channel coding method based on polar codes, which improves the transmission efficiency by adopting coding with strong error correction capability for important streams and poor or no error correction capability for non-important streams, according to the different importance of the source output streams
[75][102]. Yushuang Z et al. proposed a polar coding construction algorithm for the UWA channel based on the Monte Carlo method; they then optimized Monte Carlo statistical parameters based on the dynamical cognitive of the channel, jointing decoding, and decision feedback channel estimation. It achieved error-free transmission at a signal-to-noise ratio of about 14 dB and a communication distance of about 1 km. Also, it exhibited better error correction than the LDPC-coded modulation system under the same circumstances
[76][103]. Also, Chen R et al. constructed several optimal polar codes with different code lengths and rates based on the optimized Monte Carlo (MC) method for UWA channels, and their performance was found to be better than that of the LDPC-coded OFDM communication system in shallow sea experiments
[77][104]. As shown in
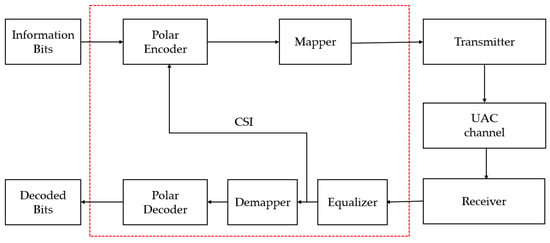
Figure 1420, in 2023, Liu F et al. proposed a polar coding scheme with less feedback and low complexity based on adaptive equalization. A hybrid automatic repeat request (HARQ) mechanism was provided to overcome the influence of estimation errors. Simulation results demonstrated better BER performance and lower decoding computational complexity than turbo equalization
[78][105].
Figure 1420.
The polar coding scheme with the HARQ mechanism.
Yang X et al. proposed a real-time polar-coded orthogonal signal-division multiplexing modem for UWAC, including hardware and software. It achieves error-free accuracy with a data rate of 4.35 kb/s using the minimum mean square error (MMSE) equalizer and polar decoding under slow, time-varying channels, and the communication range reaches more than 5 km
[79][106].
In summary, this section provided an overview of the research on polar codes in UWAC. Polar codes are widely applied in wireless communication due to its low complexity and superior performance. In UWAC, the feasibility is first verified, and the adaptability is studied; then, it is employed with channel equalization and source coding to improve the system’s performance. Meanwhile, it has also been implemented in a hardware real-time transmission system. Current research focuses on the construction of polar codes in UWA channels.