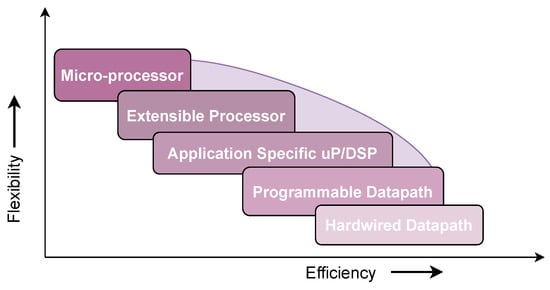
Implementation possibilities scheme.
4.1. Hardware Solutions
Hardware implementations of Keccak demand careful consideration of trade-offs. When implementing Keccak in hardware, the choice of design parameters and strategies heavily depends on the specific goals and constraints of the target application. These objectives typically revolve around factors such as speed, power efficiency, and area utilization. This section will explore the various aspects that can be considered during the hardware implementation of Keccak, with a focus on these key parameters.
Unrolling. Unrolling is particularly efficient in improving the throughput for single-message hashing. Considering Keccak, the f-permutation block can be replicated and unrolled in the SHA-3 hash function. As an example, Refs.
[6][12][6,12
For instance, in
[8][14][8,14], the pipeline is inserted between the
𝜋 and
𝜒 steps, while, in
[12], it is inserted between the
𝜃 and
𝜌 steps.
Folding. Towards a more compact SHA-3 structure, folding of the round computation can be considered. In the case of
[15], each round is computed over multiple clock cycles, depending on the folding factor.
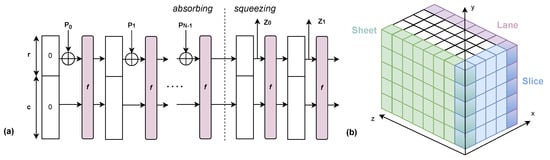
Cutting the Keccak state. The efficient management of the Keccak state is of paramount importance
[16]. There are multiple alternatives, namely using slice-wise, plane-wise, and bit-interleaving techniques. Jungk et al.
[17] propose a very compact slice-oriented Keccak hardware, based on the observation that all Keccak steps except
𝜌 can be performed efficiently with slice-wise processing. However, since input messages for absorption generally arrive in a lane-oriented fashion, the plane-wise partitioning is favorable (adjacent bits in a register belong to the same lane).
Interleaved lanes. Bit-interleaving is a technique that can be used to break large 64-bit lanes of Keccak into smaller chunks
[18].
Resource Sharing. Resource area sharing is a crucial optimization technique employed in hardware design, particularly in the context of FPGAs and ASICs. It aims to maximize the efficient utilization of available resources while minimizing the overall hardware footprint, which can lead to cost savings, improved performance, and reduced power consumption. An interesting example is the co-processor presented in
[2], named AE$HA-3, which combines two of the NIST’s standardized algorithms, i.e., Advance Encryption Standard (AES) and SHA-3. Maache et al.
[3] also present a multi-purpose cryptographic system performing both AES and SHA-3, implementing it on the IntelFPGA Cyclone-V device.
To sum up, the hardware implementation of Keccak is a multifaceted task that necessitates careful consideration of various trade-offs and objectives. The specific design choices will be heavily influenced by the unique demands of the target application, whether it be a high-performance cryptographic accelerator, a low-power embedded system, or any other use case in which Keccak is employed. Each implementation will strike a balance between speed, power efficiency, area utilization, and security to meet its intended purpose effectively.
4.2. Software Solutions
Enhancing the software implementation of an algorithm holds the key to unlocking superior performance. By optimizing code, leveraging hardware-specific features, and minimizing resource overhead, software improvements can significantly boost algorithmic efficiency, resulting in faster execution and better utilization of available hardware resources. Accelerating the SHA-3 algorithm on FPGA devices, RISC-V, or ARM without dedicated hardware accelerators involves optimizing the software implementation to maximize performance. Here are some techniques to achieve this.
Parallelization. Using parallelization for implementing multi-threading or multi-processing when having multiple CPU cores can significantly improve performances. Each core can work on a separate chunk of data, improving overall throughput. Pereira et al.
[19] present a technique for parallel processing on Graphics Processing Units (GPUs) of the Keccak hash algorithm. They provide the core functionality, and the evaluation is performed on a Xilinx Virtex 5 FPGA.
Vectorization (SIMD). Utilize the SIMD (Single Instruction, Multiple Data) instructions available in modern processors (e.g., ARM NEON, RISC-V RVV) to process multiple data elements in parallel. This can significantly speed up the hashing process, especially when dealing with large datasets. For example, Ref.
[20] proposes a set of six custom instructions for Keccak-
𝑓,𝑝 [1600, 800, 400, 200] primitives, and, similarly to other crypto-instructions (e.g., Intel AES-NI and SHA), they exploit the wide SIMD (Single Instruction, Multiple Data) registers. Li et al.
[21] explore the full potential of parallelization of Keccak-
f[1600] in RISC-V-based processors through custom vector extensions on 32-bit and 64-bit architectures.
Loop Unrolling. Unroll loops in the SHA-3 algorithm code to reduce loop overhead and enable the compiler to optimize the code more effectively. This can result in faster execution, especially on CPUs with pipelined execution units. Ref.
[22] reports several analyses about security versus area versus the timing of PQC decapsulation algorithms, after loop unrolling, showing how, in most cases, this brings a significant reduction in latency.
Instruction-Level Optimization. Hand-tune critical sections of the code to use processor-specific instructions and features. This may include using assembly language or intrinsic to access specialized instructions for SHA-3 operations. Ref.
[23] presents two new techniques for the fast implementation of the Keccak permutation on the A-profile of the Arm architecture: the elimination of explicit rotations in the Keccak permutation through barrel shifting, and the construction of hybrid implementations concurrently leveraging both the scalar and the Neon instruction sets of AArch64.
Optimized Compiler Flags. Use compiler optimization flags (
-O2,
-O3, i.e., in
[24]) to instruct the compiler to apply various optimizations, including loop unrolling, inline function expansion, and instruction scheduling. Ref.
[25] uses
-On command line flags during GCC compilation to improve performance at the cost of increased compilation times.
Memory Access Optimization. Minimize memory access latency by optimizing data structures and memory access patterns. Cache-friendly data structures and efficient memory layouts can reduce the number of cache misses. Choi et al.
[26] discuss optimizations, memory management strategies, and parallelization schemes, aiming to enhance the performance and throughput of SHA-3 operations on graphics processing units (GPUs).
Prefetching. Use prefetching techniques to load data into the cache before it is actually needed, reducing memory access stalls and improving data processing speed. Lee et al.
[27], using NVIDIA GPU, exploit the feature for which arithmetic instructions and memory load/store instructions can be executed concurrently, as long as there is no dependency between the executing instruction and data being loaded/stored. They prefetch the input data of Keccak before XORing it into the state, so that address calculation and bitwise XOR operation can run in parallel with the memory copy operation.
The effectiveness of these techniques will depend on the specific platform, compiler, and workload, so thorough testing and profiling are essential to achieve optimal results. Continuously profiling and benchmarking the software implementation will help identify performance bottlenecks and areas for improvement. This iterative process can lead to significant performance gains.
4.3. Hybrid Solutions
Hybrid solutions, which combine both software and hardware components, represent a versatile approach to solving complex problems by harnessing the strengths of each domain. These solutions essentially encompass all of the techniques discussed in the previous section and merge them into a cohesive, integrated system.
In the realm of technology and problem-solving, software and hardware have traditionally been seen as separate entities. Software provides flexibility and adaptability, while hardware offers raw processing power and efficiency. A hybrid solution brings together the computational capabilities of hardware and the logic and adaptability of software to create a powerful and agile system. It allows optimization of the performance by distributing tasks between software and hardware according to their respective strengths. This means that computationally intensive tasks can be offloaded to dedicated hardware accelerators, while software can handle tasks that require flexibility and frequent updates. This balance ensures that the system operates efficiently without bottlenecks. Moreover, being that software is inherently adaptable, it is easier to implement changes and updates to meet evolving requirements. Fritzmann et al.
[4] present RISQ-V, an enhanced RISC-V architecture that integrates a set of powerfully coupled accelerators. Here, hardware/software co-design techniques have been combined to develop complex and highly customized solutions, designing tightly and loosely coupled accelerators and Instruction Set Architecture (ISA) extensions. This is an example of how combining the hardware and software provides the flexibility to adjust algorithms, logic, or functionality in response to changing needs while maintaining the stability and speed of the hardware.