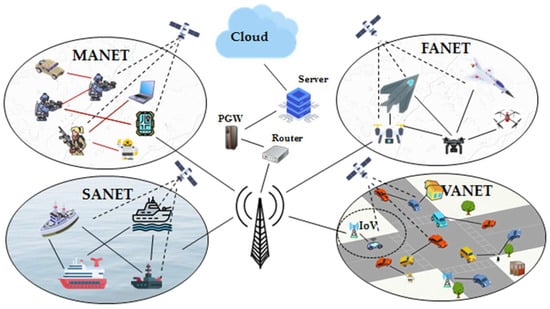
Wireless Mobile Ad-hoc Networks (WANETs-MANETs) are one of the most in-demand networks in our day and age, being widely used in military fields, disaster environments, autonomous robots, vehicular networks, rural and urban environments, and UAV applications. This is due to the remarkable features of versatility, robustness, and self-configuration with no infrastructure. Such networks' main objective is to deliver reliable data transmission directly to nodes such routers, access points, smartphones, and vehicles with dynamically adjusting the data routes in accordance with the network conditions and GPS information.
However, mobility in ad hoc networks is yet the crucial issue due to the dynamic changes of the network topology; this makes data routing a substantial challenge. To this end, choosing or design the proper routing protocol plays important role in establishing robust, secure and efficient data communication for randomly distributed and unrestricted movement of nodes. In this regard, we will briefly introduce the main types of routing protocols that can be utilized in various types of ad hoc networks such as MANET, VANET or FANET or SANET; and how to evaluate them based on their pros, cons and operation.
- routing protocols
- WANET
- MANET
- VANET
- FANET
- AODV
- GPSR
1. Introduction
2. Classifications of Routing Protocols
| Routing Protocol | Categories | Description | Advantages | Drawbacks | ||||
|---|---|---|---|---|---|---|---|---|
| Topology-based | Reactive: AODV, DSR, ACOR, DYMO | On-demand routing; routes are founded when required by establishing route requests across the network. |
|
| ||||
| Proactive: STAR, DSDV, OLSR | The routes kept updating in a table even though there is no demand for a route (table-driven) |
|
| |||||
| Hybrid: DVRP, ZRP, HSLS | Combine Reactive and Proactive routing algorithms. |
|
| |||||
| Geographic-based | GPSR, LAR, MORA, VADD, | The path establishment is based on the node’s location information from GPS equipment. |
|
| ||||
| Hierarchical-based | HSR, HDVG | The nodes are organized into hierarchal groups. |
|
| ||||
| Multicast-based | CBM, MDR, SMORT, AOMDV | A node establishes route to a single or multiple destinations simultaneously. |
|
| ||||
| Geo-cast-based | DGR, IVG | Send messages to a single or multiple nodes based on location (combine geographic and multicast routing). |
|
| ||||
| Cluster based | GBDRP, PBSM, LEACH | The protocol divides network nodes into a number of overlapping or disparate clusters and assigns cluster heads to keep track of cluster membership. |
|
|
References
- Al-Absi, M.A.; Al-Absi, A.A.; Sain, M.; Lee, H. Moving Ad Hoc Networks—A Comparative Study. Sustainability 2021, 13, 6187.
- Quy, V.K.; Han, N.D.; Linh, D.M.; Ngoc, L.A. A Novel Method to Improve Performance of Major Nodes in Military MANET. IAENG Int. J. Comput. Sci. 2021, 48, 776–781.
- Lansky, J.; Ali, S.; Rahmani, A.M.; Yousefpoor, M.S.; Yousefpoor, E.; Khan, F.; Hosseinzadeh, M. Reinforcement Learning-Based Routing Protocols in Flying Ad Hoc Networks (FANET): A Review. Mathematics 2022, 10, 3017.
- Yogarayan, S. Wireless Ad Hoc Network of MANET, VANET, FANET and SANET: A Review. J. Telecommun. Electron. Comput. Eng. JTEC 2021, 13, 13–18.
- Al-Essa, R.I.; Al-Suhail, G.A. A Service of RSU Communication in Internet of Vehicles (IoV) in Urban Environment. In ICCIDA 2022: Computational Intelligence, Data Analytics and Applications; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2023; Volume 643, pp. 291–303.
- Manolopoulos, I.; Loukatos, D.; Kontovasilis, K. A Versatile MANET Experimentation Platform and Its Evaluation through Experiments on the Performance of Routing Protocols under Diverse Conditions. Future Internet 2022, 14, 154.
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971.
- Alhameed, M.H.; Mahgoub, I.O. High Awareness Adaptive Beaconing Based on Fuzzy Logic in VANET. In Proceedings of the MobiWac ‘17: Proceedings of the 15th ACM International Symposium on Mobility Management and Wireless Access, New York, NY, USA, 21 November 2017; pp. 153–157.
- Mahmud, I.; Cho, Y.-Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015.
- Saudi, N.A.M.; Arshad, M.A.; Buja, A.G.; Fadzil, A.F.A.; Saidi, R.M. Mobile Ad-Hoc Network (MANET) Routing Protocols: A Performance Assessment. In Proceedings of the Third International Conference on Computing, Mathematics and Statistics (iCMS2017), Langkawi, Malaysia, 28 March 2019; pp. 53–59.
- Sirmollo, C.Z.; Bitew, M.A. Mobility-Aware Routing Algorithm for Mobile Ad Hoc Networks. Wirel. Commun. Mob. Comput. 2021, 2021, 6672297.
- Al-Essa, R.I.; Al-Suhail, G.A. Mobility and Transmission Power of AODV Routing Protocol in MANET. In Proceedings of the 2022 2nd International Conference on Computing and Machine Intelligence (ICMI), Istanbul, Turkey, 15–16 July 2022; pp. 1–5.
- Han, S.Y.; Lee, D. An adaptive hello messaging scheme for neighbor discovery in on-demand MANET routing protocols. IEEE Commun. Lett. 2013, 17, 1040–1043.
- Li, X.; Huang, J. ABPP: An Adaptive Beacon Scheme for Geographic Routing in FANET. In Proceedings of the 2017 18th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT), Taipei, Taiwan, 18–20 December 2017; pp. 293–299.
- Shelly, S.; Babu, A.V. Link Reliability Based Greedy Perimeter Stateless Routing for Vehicular Ad Hoc Networks. Int. J. Veh. Technol. 2015, 2015, 921414.
- Aljabry, I.A.; Al-Suhail, G.A. A Simulation of AODV and GPSR Routing Protocols in VANET Based on Multimetrices. Iraqi J. Electr. Electron. Eng. 2021, 17, 66–72.
- Shah, S.A.A.; Ahmed, E.; Xia, F.; Karim, A.; Shiraz, M.; Noor, R.M. Adaptive Beaconing Approaches for Vehicular Ad Hoc Networks: A Survey. IEEE Syst. J. 2018, 12, 1263–1277.
- Singh, V.; Sharma, K.P.; Verma, H.K. Evaluating the Impact of Beacon Interval and Neighbor Timeout Timer on the Performance of Geographical Routing in FANETs. In Proceedings of the 3rd International Conference on Integrated Intelligent Computing Communication & Security (ICIIC 2021), Bangalore, Karnataka, India, 6–7 August 2021; Volume 4, pp. 331–338.
- Silva, A.; Niaz Reza, K.M.; Oliveira, A. An Adaptive GPSR Routing Protocol for VANETs. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018.
- Alemneh, E.; Senouci, S.; Messous, M. An energy-efficient adaptive beaconing rate management for pedestrian safety: A fuzzy logic-based approach. Pervasive Mob. Comput. 2020, 69, 101285.
- Rawat, G.S.; Singh, K. Joint Beacon Frequency and Beacon Transmission Power Adaptation for Internet of Vehicles. Trans. Emerg. Telecommun. Technol. 2020, 33, e4124.
- Sangaiah, A.K.; Javadpour, A.; Hsu, C.-C.; Haldorai, A.; Zeynivand, A. Investigating Routing in the VANET Network: Review and Classification of Approaches. Algorithms 2023, 16, 381.
- Zhang, F.; Yang, G. A Stable Backup Routing Protocol for Wireless Ad Hoc Networks. Sensors 2020, 20, 6743.
- Al-Essa, R.I.; Al-Suhail, G.A. An Efficacy of Transmission Power on DYMO Routing Protocol in VANET. In Proceedings of the 2022 International Conference on Engineering & MIS (ICEMIS), Istanbul, Turkey, 4–6 July 2022; pp. 1–6.
- Kaur, S.; Gupta, A.K. Position Based Routing in Mobile Ad-Hoc Networks: An Overview. Int. J. Comput. Sci. Technol. IJCST 2012, 3.
- Ramasamy Rajeswari, A. A Mobile Ad Hoc Network Routing Protocols: A Comparative Study. In Recent Trends in Communication Networks; IntechOpen: London, UK, 2020.
- Sabor, N.; Sasaki, S.; Abo-Zahhad, M.; Ahmed, S.M. A Comprehensive Survey on Hierarchical-Based Routing Protocols for Mobile Wireless Sensor Networks: Review, Taxonomy, and Future Directions. Wirel. Commun. Mob. Comput. 2017, 2017, 2818542.
- Sabaresan, V.; Godfrey Winster, S. Multicast Routing Protocols for Mobile ADHOC Networks. Int. J. Eng. Adv. Technol. 2019, 9, 148–163.