Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Daniel A. Segovia-Cardozo and Version 3 by Dean Liu.
Tipping bucket rain gauges (TBRs) continue to be one of the most widely used pieces of equipment for rainfall monitoring; they are frequently used for the calibration, validation, and downscaling of radar and remote sensing data, due to their major advantages—low cost, simplicity and low-energy consumption.
- precipitation monitoring
- rainfall measurement biases
- rain gauge
1. Introduction
Rainfall is a phenomenon that has attracted the interest of human beings since ancient times; rwesearchers h have tried to measure it and to understand all the processes linked to it. The earliest reference to a rain gauge was in India, by Kautilya, in the fourth century B.C.; however, references regarding its use in Europe started in the 17th century in Italy, where Benedetto Castelli developed isolated experiments with a non-recording rain gauge in around 1639 and Sir Christopher Wren developed the earliest recording instrument [1]. Since then, this interest has grown, and nowadays, rainfall monitoring, research, and forecasting (calibration/validation) are of general interest to better understand the hydrological cycle and subjects that depend on water and precipitation, such as irrigation, hydrological research, water resource management, flood risk, flood alert, flood and weather forecast, hydraulic structure design, urban planning, industry, and a large number of human interest activities [2][3][4][5][6][7][8][9][10][2,3,4,5,6,7,8,9,10]. Human interest in precipitation monitoring has grown with technological development and the increase in human population, which demands increasingly more resources, generating stress on natural hydrological systems. Thus, hydrological research is gaining interest not only in the scientific community, but also in governmental institutions, with unprecedented support [11]. However, hydrologic systems are complex and to better address hydrological research, modeling, and forecasting, accurate data, and if possible, data obtained with a high space–time frequency are needed to understand and explain the nature of dynamical hydrologic systems and to help with decision making aimed at mitigating flood risk, among other branches of hydrological research [11][12][13][14][15][16][11,12,13,14,15,16].
Moreover, the goals of the current International Hydrologic Scientific Decade 2013–2022 highlight these challenges, and call for the development of new and innovative monitoring techniques to improve hydrologic monitoring platforms, networks, and databases in order to obtain more reliable data [12][15][12,15].
Among the different hydrological variables, rainfall monitoring is one of the most important factors in hydrological research and flood risk management [11][17][11,17]. Monitoring rainfall in time and space, together with the availability of accurate rainfall data, is a key issue for managing water resources and forecasting, such as water budget studies, flood frequency analysis, sewer drainage design, surface water hydrology, and flood risk [16][18][16,18].
Accurate rainfall data are needed to understand the complexity of hydrological systems for water management and rainfall flood forecast, and to better understand extreme events, which can cause severe damage; these are scarcely documented and lead to difficulties in flood modeling [19][20][19,20]. Since precipitation (depth and intensity) is usually estimated by means of temporal averages and spatial interpolations that often do not represent their variability, accurate and reliable results can be achieved if good-quality hydrologic data are provided from a well-designed and well-implemented data collection program [11][21][11,21].
Measuring rainfall is not only about instrument accuracy; it is also about the capacity of the data to represent the reality of the hydrological system. Since the rainfall phenomenon is characterized as being dynamic, not only in time but also in space, a proper frequency of data measurement and its spatial representativeness must be considered to achieve better results. As [22] commented, the starting point in gaining a good hydrological understanding is accurate rainfall measurement and forecasting with useful lead times. Nonetheless, instrument accuracy is a main factor to be considered, since most of the instruments used to measure rainfall are subject to measurement biases that can be reduced with proper equipment management [2].
2. Tipping Bucket Rain Gauges and Their Measurement Uncertainties
Among all the different rainfall measurement sensors, TBRs are the most widely used worldwide due to their simple manufacturing structure, which is based on an electric pulse, a magnetic reed switch mechanism, and a counter [2]. TBRs include a receiver (a funnel) that collects rainwater into a bucket, which is one-half of a two-bucket receptacle, pivoted on a cylindrical axis, that tips once the upper bucket fills up to a specified water amount (tipping volume, Vt) and raises the lower bucket into a position under the waterfall line, where it will begin to fill at the same time as the other bucket empties. In this movement, a magnet located in the tipping bucket mechanism generates an output signal through a magnetic reed switch to a recorder, and each pulse is set as a nominal amount of rainfall according to a fixed Vt, which can be set by two calibration stop screws (one for each bucket; Figure 1) [2][23][24][2,28,63].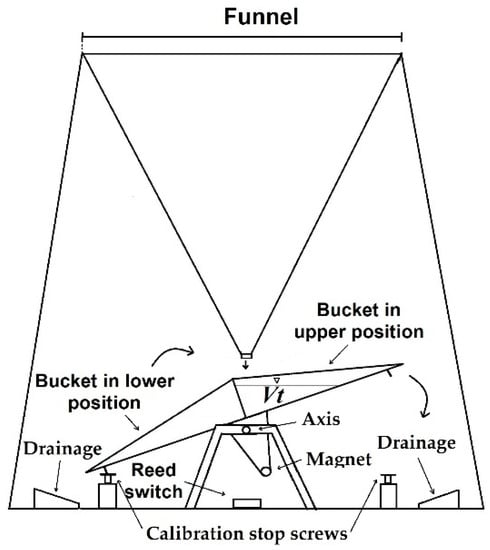
Figure 1. Tipping bucket rain gauge.
2.1. Instrumental Error
The mechanical characteristics that benefit the operation of TBRs also generate a systematic mechanical bias that underestimates rainfall as the rainfall intensity (RI) increases. According to [24][63], this phenomenon is due to the water lost during the tipping movement of the buckets. During this movement, some water is not measured since the movement starts at that instant when a given bucket’s volume is reached. However, the bucket tipping rotation requires an amount of time that generates a time window where some rainwater is added as an unmeasured surplus (Figure 2). In addition, according to [2], there is another source of surplus caused by the drop triggering the tipping movement (D), with a certain fraction of its volume that exceeds the Vt, both related to RI. As the RI increases, the water flow in the funnel and the size of D increases. However, the surplus due to D can be considered negligible in contrast to that caused by the time the bucket takes to tip [2][37][2,72].
Figure 2. Water falling on the bucket during the tipping movement as an unmeasured surplus. Source: [2].
2.2. External Sources of Bias
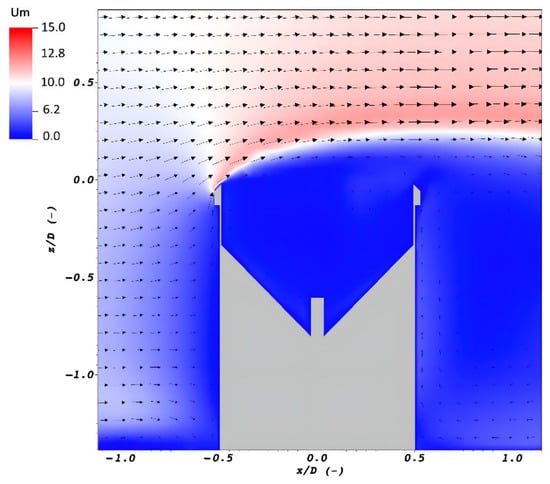
These are the biases caused by external agents, not directly related to the TBR operating mechanism, such as losses from evaporation, wetting, splashing, funnel clogging, colonization for animals or insects, and wind effects [32][36][45][46][48][49][50][51][52][68,71,79,80,82,83,84,85,86]. Among all of these, the last one is the most relevant source of error in many precipitation monitoring sensors. According to [23][28], the effect of wind is caused by the interaction between the gauge body and the airflow. The rain gauge behaves as a “bluff-body” when impacted by the wind that produces airflow deformations around it, which results in significant acceleration and vertical velocity components above the collector that deviate the trajectories of the hydrometeors (Figure 3) and induces a significant reduction in their performance [23][32][43][51][53][28,68,78,85,87].