Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Guo, Y.; Zhou, J.; Li, X.; Tang, Y.; Lv, Z. Crowdsourcing Update Methods for High-Definition Maps. Encyclopedia. Available online: https://encyclopedia.pub/entry/56523 (accessed on 26 July 2026).
Guo Y, Zhou J, Li X, Tang Y, Lv Z. Crowdsourcing Update Methods for High-Definition Maps. Encyclopedia. Available at: https://encyclopedia.pub/entry/56523. Accessed July 26, 2026.
Guo, Yuan, Jian Zhou, Xicheng Li, Youchen Tang, Zhicheng Lv. "Crowdsourcing Update Methods for High-Definition Maps" Encyclopedia, https://encyclopedia.pub/entry/56523 (accessed July 26, 2026).
Guo, Y., Zhou, J., Li, X., Tang, Y., & Lv, Z. (2024, March 29). Crowdsourcing Update Methods for High-Definition Maps. In Encyclopedia. https://encyclopedia.pub/entry/56523
Guo, Yuan, et al. "Crowdsourcing Update Methods for High-Definition Maps." Encyclopedia. Web. 29 March, 2024.
Copy Citation
High-definition (HD) maps serve as crucial infrastructure for autonomous driving technology, facilitating vehicles in positioning, environmental perception, and motion planning without being affected by weather changes or sensor-visibility limitations.
autonomous driving
high-definition map
crowdsourcing update
1. Introduction
In the late 20th century, manual mapping methods were gradually replaced by digitalized cartography [1][2][3][4]. With the continuous increase in urbanization and the widespread use of automobiles, there has been a substantial rise in transportation demands, leading to the emergence of navigable digital road maps [5]. At the same time, with the development of information and communication technology, sensor technology, and artificial intelligence, the field of autonomous driving technology has rapidly progressed. According to the Society of Automotive Engineers (SAE) J3016 standard, there are six levels in vehicle automation from L0 to L5 [6]. As autonomous driving technology advances from L2 to beyond L3, it imposes higher demands on navigable digital maps. High-definition (HD) maps have emerged and have gradually become a fundamental component of autonomous driving technology [7][8].
HD maps are specialized electronic maps primarily used for advanced driver-assistance systems (ADAS) and autonomous driving. They contain rich, high-precision geographical road information and are stored and managed in standardized formats [9]. As shown in Figure 1, HD maps generally consist of road networks, lane information, localization features, and traffic infrastructure details. The road network primarily describes the geometric and attribute information related to roads, such as road types, grades, and widths. Lane information focuses on specific lane markings, detailing lane direction, numbers, and speed limits within each lane. Localization features encompass points used by autonomous vehicles for positioning, including their location, type, texture, and shape. The signal layer contains geometric and semantic information about traffic signs, traffic lights, and specific road markings, detailing their types, heights, and other characteristics. The road network in HD maps aids autonomous vehicles in global navigation and path planning. Lane information is utilized for fine-grained, lane-level path planning in autonomous driving [10][11]. Localization features and signals assist autonomous vehicles in environmental perception and achieving high-precision positioning [12][13][14].
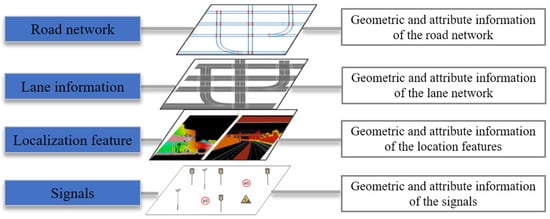
Figure 1. The main contents of HD maps.
As an indispensable component of autonomous driving, the production and updates of HD maps significantly influence the development of autonomous driving technology. Research institutions, autonomous driving companies, and map producers are actively involved in the research and development of HD maps. Companies such as HERE, TomTom, and Waymo offer HD maps covering major highways globally, provide detailed lane information in key cities worldwide, and supply Advanced Driver-Assistance System (ADAS) maps with global coverage [15][16].
There are two commonly used methods for producing and updating HD maps. The first method involves using mobile mapping systems (MMS) equipped with high-precision light detection and ranging (LiDAR), high-definition cameras, and accurate positioning devices to collect data in specific areas [17]. Subsequently, the collected data undergo processing and feature extraction to generate HD maps. This approach is known as centralized production and the updating of HD maps. While maps produced using this method exhibit high accuracy, they require expensive sensors and skilled professionals to conduct map acquisition and production. With advancements in sensor technology, the cost of cameras and global navigation satellite system (GNSS) positioning devices has decreased. Consequently, more vehicles are equipped with these sensors, enabling partial implementation of advanced driver-assistance features. Simultaneously, these sensors can be utilized for data collection and perception. The collected data are transmitted to the mapping cloud platform for data cleaning, fusion, and information extraction, facilitating updates to HD maps. This approach, known as the crowdsourced updating of high-definition maps, eliminates the need for expensive sensors and allows for large-scale map updates. However, compared to centralized methods, this approach involves a more complex technical path.
Some map providers adopt a combination of centralized and crowdsourced methods for real-time updates of HD maps. For instance, HERE MMS for collecting foundational HD maps employs crowdsourced vehicles equipped with visual sensors to update road information in real time. Other map providers opt for a single crowdsourced updating approach to build HD maps. For example, Mobileye has introduced a method called Road Experience Management (REM), wherein road information is crowdsourced through vehicle-mounted cameras and deep-learning technology is utilized to recognize and collect various types of road information. Compared to centralized updating methods, crowd-sourced updating methods have advantages such as a lower cost and higher update frequency, as shown in Table 1. Therefore, the crowdsourced approach has gradually become the primary method for HD map updates.
Table 1. Comparison of HD map-update methods.
| Centralized Update | Crowdsourced Update | |
|---|---|---|
| Sensors | High-precision sensors (LiDAR, stereo camera, GNSS, IMU) |
Low-precision sensors (GNSS, camera) |
| Accuracy | Centimeter level | Decimeter level |
| Update Frequency | Low-update frequency (Quarterly/monthly) |
High-update frequency (Monthly/weekly/daily) |
| Cost | High cost | Low cost |
With the advancement of autonomous driving technology, HD maps have gained significant attention. Liu et al. presented a literature review of HD maps, focusing on HD map structure, functionalities, accuracy requirements, and standardization aspects [5]. Bao et al. introduced the concept of HD maps and their usefulness in autonomous vehicles and provided an overview of HD map-creation methods [18]. Elghazaly et al. provided a review of the applications of HD maps in autonomous driving and reviewed the different approaches and algorithms to build HD maps [4].
2. The Framework of Crowdsourced Updating
With the decreasing cost of sensors, an increasing number of vehicles are equipped with various sensors to record the vehicle-driving status to ensure driving safety. For instance, some taxis are equipped with GNSS receivers, while other vehicles may have dashcams. Moreover, the rise of intelligent driving has led to a growing number of vehicles that integrate multiple sensors, including cameras, LiDAR, and radar, enabling autonomous driving capabilities. The crowdsourced updating method leverages the sensors mounted on vehicles to collect real-time data on vehicle-positioning trajectories and road-sequence imagery, enabling the real-time perception of lane markings, traffic signs, and other elements. The gathered diverse and dispersed data are centrally processed through a map cloud-service platform. A series of algorithms involving data cleaning, data fusion, information extraction, change detection, and map updating are applied to analyze and process the crowdsourced data. This process enables rapid updates of HD maps, which are then transmitted to autonomous vehicles to assist in lane-level navigation, high-precision positioning, environmental perception, and path planning, as shown in Figure 2. Therefore, the key technologies involved in crowdsourced updating methods encompass data collection, real-time environmental perception, data processing, and change detection. These technologies synergistically contribute to constructing the crowdsourced updating system for HD maps.
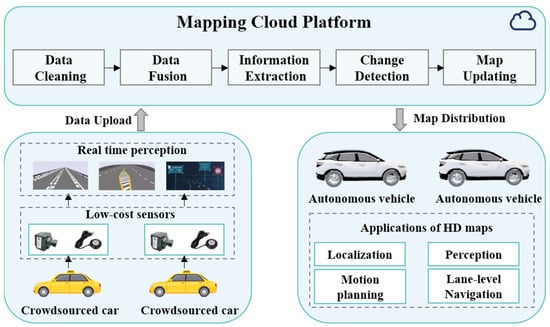
Figure 2. The overall framework of crowdsourced updates for HD maps.
3. Crowdsourced Data Collection for HD Maps Updating
Data collection is the primary step in crowdsourced updating, with an emphasis on cost-effectiveness. While, theoretically, any vehicle equipped with sensors could contribute to the crowd-sourced updating of HD maps, the current trend leans toward utilizing public buses or taxis, which are equipped with standard sensors such as IMU, GNSS, and cameras, to address computational resource constraints and privacy considerations. Some HD map providers, like HERE, employ advanced sensors such as LiDAR or radar for crowd-sourced data collection. As depicted in Figure 3, IMUs and GNSS receivers are capable of collecting vehicle-trajectory data, cameras gather road-image sequences, and LiDAR and radar sensors capture point-cloud data of the road.
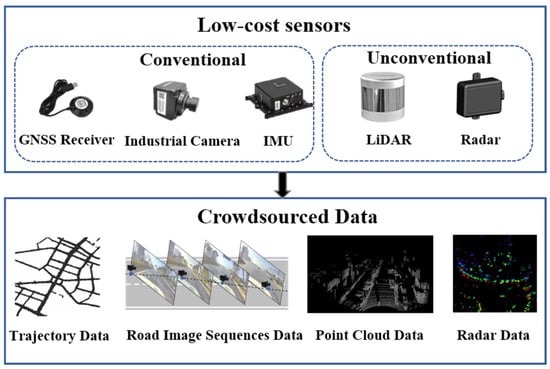
Figure 3. Crowdsourced updating sensors and data.
3.1. GNSS-Based Data-Collection Methods
As the cost of positioning devices decreases, most vehicles such as buses and taxis are now equipped with GNSS devices capable of recording the time, speed, and position information of vehicles. These data are commonly referred to as floating car data (FCD), offering advantages of broad coverage and real-time capabilities [19]. Leveraging abundant FCD not only facilitates the acquisition of lane information but also allows for inferring changes in road usage, such as traffic congestion, road closures, and temporary restrictions. These data serve as foundational support for the dynamic updating of HD maps.
According to the sampling frequency, FCD can be categorized into high-frequency and low-frequency types. High-frequency FCD usually have a sampling rate higher than 1 Hz, while low-frequency FCD are typically collected every 10–60 s. In general, high-frequency FCD are often sourced from high-precision GNSS recorders or smartphones. High-precision GNSS recorders can achieve sampling frequencies of 10–100 Hz and positional accuracy up to 3 m. Smartphones, on the other hand, typically have sampling frequencies ranging from 1 Hz to 5 Hz, with positional accuracy slightly lower than high-precision GNSS recorders but still reaching up to 5 m [20][21]. Dolancic et al. utilized devices with diverse spatial and temporal resolutions to collect GNSS trajectories, enabling the derivation of the topology and geometric information required for high-accuracy lane maps [22]. Arman et al. proposed a method that is capable of identifying lanes in highway segments based on GPS trajectories. The GPS data were collected through the Touring Mobilis smartphone app Be-Mobile. It includes time, coordinates, speed, and headings, and it is stored at 1 Hz frequency [23]. High-frequency FCD typically possesses superior spatiotemporal resolution and provides more accurate speed and acceleration information, enabling the extraction of more precise road details. However, this data-collection method increases energy consumption and demands larger storage space for trajectory data. Additionally, high-frequency GNSS receivers are relatively expensive.
Low-frequency FCD typically originate from public transportation vehicles such as taxis and buses. The sampling frequency for this type of data generally falls within the range of 10 s to 60 s, with positioning accuracy ranging from 10 m to 30 m [24][25][26]. Li et al. proposed a method that utilizes FCD data collected from taxis in Wuhan to detect auxiliary lanes at intersections [24]. Similarly, Kan et al. proposed a method to detect traffic congestion based on FCD data collected by taxis, with a sampling frequency of 60 s [25]. The acquisition of low-frequency FCD is characterized by extended time intervals, contributing to reduced energy consumption and minimized data volume. However, this method yields trajectory data with lower spatial and temporal resolution, leading to limited precision in extracting road information.
In summary, high-frequency FCD data provide higher accuracy and detailed road information. In contrast, low-frequency FCD data often contain more noise, requiring data cleaning before acquiring map information. While FCD serve as a crucial data source for multi-source updated HD maps, it is essential to note that both low-frequency and high-frequency GNSS data may exhibit accuracy instability. This instability can be attributed to factors such as weather, obstruction, or signal reflection, limiting the accuracy of the information obtained. Moreover, while FCD data can typically capture road geometry, inferring specific semantics and attribute information can be challenging. To meet the requirements of HD maps, crowdsourced updating necessitates richer and more precise data.
3.2. Camera-Based Data-Collection Methods
For the crowdsourced updating of HD maps, existing research tends to favor the use of low-cost industrial cameras combined with GNSS receivers to gather road data. This approach allows for the capturing of richer details of the roads. The vision-based crowdsourced data-collection method can be classified based on the number of cameras used as either monocular-vision or stereo-vision approaches. Additionally, depending on whether calibration is required between the cameras and GNSS receivers, these methods can be further categorized into those that require calibration and those that do not.
Monocular vision is a prevalent method for crowdsourced data collection due to its light weight, easy installation, and cost-effectiveness. However, this approach cannot directly capture depth information of the scene. To achieve more accurate 3D road reconstruction, single-camera systems typically integrate with Inertial Navigation Systems (INS) or wheel encoders [27][28]. For instance, Guo et al. proposed a low-cost scheme for extracting lane information for HD maps. The authors utilized vehicles equipped with standard GPS, INS, and a real camera to collect road-image data during daily driving activities while synchronizing the vehicle’s trajectory [29]. Jang et al. also proposed a method for automatically constructing HD maps using a monocular camera setup. Their approach involved obtaining odometry data from the wheel encoder of the vehicle, estimating the vehicle’s position, and detecting HD maps information from the obtained images [30].
Today, some massive commercial vehicles are equipped with onboard sensors such as IMU, GPS, wheel encoders, and cameras, which can gather substantial road-related data for crowdsourced updates to HD maps [31], as shown in Figure 4a. Bu et al. utilized a monocular camera setup with a GPS system onboard a commuter bus traveling between downtown Pittsburgh and Washington, Pennsylvania, to autonomously detect changes in pedestrian crosswalks at urban intersections [32]. Moreover, Korean IT company SK Telecom installed camera devices to collect crowdsourced data, which are called the Road Observation Data (ROD) on public buses in Seoul. Kim et al. used this data to update lane information for HD maps [33]. Apart from buses, many private vehicles and ride-hailing cars are also equipped with cameras [34], at present as shown in Figure 4b. Yan et al. cooperated with automobile manufacturers to collect image or video data, along with GPS information during driving, with the users’ consent to update lane information in HD maps [35].

Utilizing monocular vision for crowdsourced data collection offers a cost-effective solution that can be easily deployed on various types of vehicles. This method is well-suited for large-scale crowdsourced data-collection projects, allowing for the capturing of a substantial amount of road information in a relatively short time. However, it lacks the ability to directly acquire in-depth information about the scene. To address this limitation and enhance the construction of HD maps, the integration with other sensors becomes necessary.
The aforementioned methods all require calibration to obtain the intrinsic and extrinsic parameters of the monocular camera. This step is necessary to transform the extracted local HD map information from the camera coordinate system to the 3D geographic coordinate system through perspective transformation. However, the process of camera calibration typically demands expertise, relying on experimentation and calculations to acquire the camera’s intrinsic and extrinsic parameters. Therefore, some researchers have proposed HD map-construction methods that do not rely on the intrinsic and extrinsic parameters of cameras or smartphones [36][37][38]. Chawla et al. proposed a method for extracting 3D positions of landmarks in HD maps [36]. This approach is used only on a monocular color camera and GPS without assuming the known camera’s intrinsic and extrinsic parameters. Methods that do not require calibration simplify the deployment process of monocular camera setup and make it easier to install on different platforms. However, the absence of calibration may result in the inaccurate estimation of the camera intrinsic and extrinsic parameters, impacting the accuracy and precision of the collected data. To address this issue, more complex post-processing is needed to correct distortions in the images.
The monocular camera-based method faces limitations in practical application due to constraints related to the field of view, weather conditions, and variations in lighting. Consequently, some scholars have opted for stereo-vision approaches for crowdsourced data collection, aiming to enhance the accuracy of the collected data [39]. Jeong et al. utilized a vehicular setup equipped with a forward-looking stereo ZED camera, an IMU, and two wheel encoders to extract lane information for HD maps [40]. Lagahit et al. utilized a custom-made stereo camera comprising two Sony α6000 cameras to update HD maps of traffic cones [41]. Compared to monocular cameras, the use of stereo cameras allows for more accurate and detailed information in HD maps. Monocular cameras, when using data from a single trip, are susceptible to road obstructions and variations in lighting conditions, making it challenging to meet the accuracy requirements for HD maps. Hence, it is necessary to cluster data from multiple trips to compensate for their accuracy limitations. However, monocular cameras are relatively inexpensive and easier to deploy on various types of vehicles, facilitating a more widespread adoption for updating HD maps through crowd-sourced means.
3.3. LiDAR-Based Data-Collection Methods
LiDAR creates point-cloud data by emitting laser beams and measuring their return time, capturing both static and dynamic information on roads. Compared to GNSS-based and camera-based data-collection methods, LiDAR achieves higher accuracy in information acquisition. However, due to the higher cost, LiDAR-based data-collection methods are less commonly used for crowdsourced updates in HD maps. Instead, they are often integrated into MMS for centralized data collection in HD map creation. However, there are still some researchers using LiDAR for crowdsourced updates of HD maps. Dannheim et al. proposed a cost-effective method for constructing HD maps [42]. They employed post-processing algorithms to extract HD map information formed from data collected by a LiDAR, three cameras, a GNSS receiver, an IMU to gather data, and the vehicle’s CAN BUS. Kim et al. utilized low-cost GNSS and various specifications of LiDAR for crowdsourced data collection in a simulated environment. This enabled the updating of point-cloud maps in HD maps [43][44]. Liu et al. developed an acquisition component that consists of LiDAR and RGB-D cameras to update the dynamic information in HD maps in real time [45].
The high cost of LiDAR has impacted its application in crowdsourced updating for HD maps. However, with advancements in sensor technology, the cost of LiDAR is decreasing, especially with the emergence of solid-state LiDAR. While there is limited existing research on crowdsourced data collection based on LiDAR, it holds potential for application in updating HD maps through crowdsourcing efforts. Furthermore, radar data have received relatively less emphasis due to limited semantic analysis and lower resolution. However, the emergence of novel radar technologies introduces prospects for its application in crowdsourced updates of HD maps.
This section discusses various crowdsourced data-collection methods from a sensor perspective, categorizing them into three types: GNSS-based methods, camera-based methods, and LiDAR-based methods. Each method has its own advantages and disadvantages, as shown in Table 2. The GNSS-based method is cost-effective, easy to deploy in various vehicles, has extensive coverage, and updates rapidly. However, it suffers from lower accuracy and lacks detailed information about the lanes and traffic signs. Solely relying on GNSS data is challenging to meet the requirements for HD map updates. The LiDAR-based approach offers higher accuracy and is less affected by changes in environmental lighting. Nevertheless, it faces the challenge of high costs and difficulty in widespread adoption in crowdsourced vehicular platforms. The combined GNSS data-and-camera-based crowdsourced data-collection method is currently the mainstream approach. It has relatively lower costs, is easily scalable, and, although it is susceptible to environmental changes, the increase in data volume helps compensate for this issue.
Table 2. Comparison of crowdsourced data-collection methods.
| GNSS-Based | Camera-Based | LiDAR-Based | |
|---|---|---|---|
| Advantages | Cost-effective, extensive coverage, updates rapidly | Cost-effective, easily scalable, information-abundant | hHgh accuracy and robustness |
| Disadvantages | Low accuracy, limited information content | Environmentally sensitive | High cost, difficulty in widespread |
The collection of crowdsourced data employs a decentralized approach, gathering road information from various types of sensors. There exist inconsistencies in both the methods and accuracy of data collection among different vehicles and devices. Additionally, different vehicles might have distinct formats and coordinate systems. Hence, research into algorithms for aligning and integrating crowdsourced data is crucial for the crowdsourced updates of HD maps.
References
- Jones, A.; Blake, C.; Davies, C.; Scanlon, E. Digital maps for learning: A review and prospects. Comput. Educ. 2004, 43, 91–107.
- Jiang, L.; Liang, Q.; Qi, Q.; Ye, Y.; Liang, X. The heritage and cultural values of ancient Chinese maps. J. Geogr. Sci. 2017, 27, 1521–1540.
- Black, J. Maps and History: Constructing Images of the Past; Yale University Press: New Haven, CT, USA, 2000; ISBN 978-0-300-08693-5.
- Elghazaly, G.; Frank, R.; Harvey, S.; Safko, S. High-Definition Maps: Comprehensive Survey, Challenges, and Future Perspectives. IEEE Open J. Intell. Transp. Syst. 2023, 4, 527–550.
- Liu, R.; Wang, J.; Zhang, B. High Definition Map for Automated Driving: Overview and Analysis. J. Navig. 2020, 73, 324–341.
- SAE J3016 Automated-Driving Graphic. Available online: https://www.sae.org/site/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 22 November 2023).
- Ye, S.; Fu, Y.; Wang, W.; Pan, Z. Creation of high definition map for autonomous driving within specific scene. In Proceedings of the International Conference on Smart Transportation and City Engineering 2021, Chongqing, China, 6–8 August 2021; SPIE: Bellingham, WA, USA, 2021; Volume 12050, pp. 1365–1373.
- Seif, H.G.; Hu, X. Autonomous Driving in the iCity—HD Maps as a Key Challenge of the Automotive Industry. Engineering 2016, 2, 159–162.
- Poggenhans, F.; Pauls, J.-H.; Janosovits, J.; Orf, S.; Naumann, M.; Kuhnt, F.; Mayr, M. Lanelet2: A high-definition map framework for the future of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1672–1679.
- Guo, X.; Cao, Y.; Zhou, J.; Huang, Y.; Li, B. HDM-RRT: A Fast HD-Map-Guided Motion Planning Algorithm for Autonomous Driving in the Campus Environment. Remote Sens. 2023, 15, 487.
- Jian, Z.; Zhang, S.; Chen, S.; Lv, X.; Zheng, N. High-Definition Map Combined Local Motion Planning and Obstacle Avoidance for Autonomous Driving. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; 2019; pp. 2180–2186.
- Huang, Y.; Zhou, J.; Li, X.; Dong, Z.; Xiao, J.; Wang, S.; Zhang, H. MENet: Map-enhanced 3D object detection in bird’s-eye view for LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2023, 120, 103337.
- Fang, J.; Zhou, D.; Song, X.; Zhang, L. MapFusion: A General Framework for 3D Object Detection with HDMaps. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3406–3413.
- Shin, D.; Park, K.; Park, M. High Definition Map-Based Localization Using ADAS Environment Sensors for Application to Automated Driving Vehicles. Appl. Sci. 2020, 10, 4924.
- HERE HD Live Map|Autonomous Driving System|Platform|HERE. Available online: https://www.here.com/platform/HD-live-map (accessed on 2 February 2024).
- HD Map. Available online: https://www.tomtom.com/products/hd-map/ (accessed on 2 February 2024).
- Ye, C.; Zhao, H.; Ma, L.; Jiang, H.; Li, H.; Wang, R.; Chapman, M.A.; Junior, J.M.; Li, J. Robust Lane Extraction From MLS Point Clouds Towards HD Maps Especially in Curve Road. IEEE Trans. Intell. Transport. Syst. 2022, 23, 1505–1518.
- Bao, Z.; Hossain, S.; Lang, H.; Lin, X. A review of high-definition map creation methods for autonomous driving. Eng. Appl. Artif. Intell. 2023, 122, 106125.
- Li, X.; Zhang, Y.; Xiang, L.; Wu, T. Urban Road Lane Number Mining from Low-Frequency Floating Car Data Based on Deep Learning. ISPRS Int. J. Geo-Inf. 2023, 12, 467.
- Neuhold, R.; Haberl, M.; Fellendorf, M.; Pucher, G.; Dolancic, M.; Rudigier, M.; Pfister, J. Generating a Lane-Specific Transportation Network Based on Floating-Car Data. In Advances in Human Aspects of Transportation; Stanton, N.A., Landry, S., Di Bucchianico, G., Vallicelli, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1025–1037.
- Yang, X.; Tang, L.; Stewart, K.; Dong, Z.; Zhang, X.; Li, Q. Automatic change detection in lane-level road networks using GPS trajectories. Int. J. Geogr. Inf. Sci. 2018, 32, 601–621.
- Dolancic, M. Automatic lane-level road network graph-generation from Floating Car Data Page. GI Forum 2016, 4, 231–242.
- Arman, M.A.; Tampère, C.M.J. Road centreline and lane reconstruction from pervasive GPS tracking on motorways. Procedia Comput. Sci. 2020, 170, 434–441.
- Li, X.; Wu, Y.; Tan, Y.; Cheng, P.; Wu, J.; Wang, Y. Method Based on Floating Car Data and Gradient-Boosted Decision Tree Classification for the Detection of Auxiliary Through Lanes at Intersections. ISPRS Int. J. Geo-Inf. 2018, 7, 317.
- Kan, Z.; Tang, L.; Kwan, M.-P.; Ren, C.; Liu, D.; Li, Q. Traffic congestion analysis at the turn level using Taxis’ GPS trajectory data. Comput. Environ. Urban Syst. 2019, 74, 229–243.
- Fan, L.; Zhang, J.; Wan, C.; Fu, Z.; Shao, S. Lane-Level Road Map Construction considering Vehicle Lane-Changing Behavior. J. Adv. Transp. 2022, 2022, e6040122.
- Dabeer, O.; Ding, W.; Gowaiker, R.; Grzechnik, S.K.; Lakshman, M.J.; Lee, S.; Reitmayr, G.; Sharma, A.; Somasundaram, K.; Sukhavasi, R.T.; et al. An end-to-end system for crowdsourced 3D maps for autonomous vehicles: The mapping component. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 634–641.
- Herb, M.; Weiherer, T.; Navab, N.; Tombari, F. Crowd-sourced Semantic Edge Mapping for Autonomous Vehicles. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 7047–7053.
- Guo, C.; Kidono, K.; Meguro, J.; Kojima, Y.; Ogawa, M.; Naito, T. A Low-Cost Solution for Automatic Lane-Level Map Generation Using Conventional In-Car Sensors. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2355–2366.
- Jang, W.; An, J.; Lee, S.; Cho, M.; Sun, M.; Kim, E. Road Lane Semantic Segmentation for High Definition Map. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1001–1006.
- Qin, T.; Huang, H.; Wang, Z.; Chen, T.; Ding, W. Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario. IEEE Robot. Autom. Lett. 2023, 8, 5077–5083.
- Bu, T.; Mertz, C.; Dolan, J. Toward Map Updates with Crosswalk Change Detection Using a Monocular Bus Camera. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–8.
- Kim, K.; Cho, S.; Chung, W. HD Map Update for Autonomous Driving with Crowdsourced Data. IEEE Robot. Autom. Lett. 2021, 6, 1895–1901.
- Zhou, J.; Guo, Y.; Bian, Y.; Huang, Y.; Li, B. Lane Information Extraction for High Definition Maps Using Crowdsourced Data. IEEE Trans. Intell. Transp. Syst. 2023, 24, 7780–7790.
- Yan, C.; Zheng, C.; Gao, C.; Yu, W.; Cai, Y.; Ma, C. Lane Information Perception Network for HD Maps. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6.
- Chawla, H.; Jukola, M.; Brouns, T.; Arani, E.; Zonooz, B. Crowdsourced 3D Mapping: A Combined Multi-View Geometry and Self-Supervised Learning Approach. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 4750–4757.
- Szabó, L.; Lindenmaier, L.; Tihanyi, V. Smartphone Based HD Map Building for Autonomous Vehicles. In Proceedings of the 2019 IEEE 17th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 24–26 January 2019; pp. 365–370.
- Golovnin, O.K.; Rybnikov, D.V. Video Processing Method for High-Definition Maps Generation. In Proceedings of the 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 6–9 October 2020; pp. 1–5.
- Das, A.; IJsselmuiden, J.; Dubbelman, G. Pose-graph based Crowdsourced Mapping Framework. In Proceedings of the 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–7.
- Jeong, J.; Cho, Y.; Kim, A. Road-SLAM: Road marking based SLAM with lane-level accuracy. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1736–1743.
- Lagahit, M.L.R.; Tseng, Y.H. A preliminary study on updating high definition maps: Detecting and positioning a traffic cone by using a stereo camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4-W19, 271–274.
- Dannheim, C.; Maeder, M.; Dratva, A.; Raffero, M.; Neumeier, S.; Icking, C. A cost-effective solution for HD Maps creation. In Proceedings of the AmE 2017—Automotive meets Electronics; 8th GMM-Symposium, Dortmund, Germany, 7–8 March 2017; pp. 1–5.
- Kim, C.; Cho, S.; Sunwoo, M.; Resende, P.; Bradai, B.; Jo, K. Updating Point Cloud Layer of High Definition (HD) Map Based on Crowd-Sourcing of Multiple Vehicles Installed LiDAR. IEEE Access 2021, 9, 8028–8046.
- Kim, C.; Cho, S.; Sunwoo, M.; Resende, P.; Bradaï, B.; Jo, K. Cloud Update of Geodetic Normal Distribution Map Based on Crowd-Sourcing Detection against Road Environment Changes. J. Adv. Transp. 2022, 2022, e4486177.
- Liu, Q.; Han, T.; Xie, J.; Kim, B. Real-Time Dynamic Map With Crowdsourcing Vehicles in Edge Computing. IEEE Trans. Intell. Veh. 2023, 8, 2810–2820.
More
Information
Subjects:
Transportation Science & Technology
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
2.1K
Revisions:
2 times
(View History)
Update Date:
01 Apr 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No