Over the past few years, there has been a notable rise in the deployment of USVs and ground and air vehicles across diverse environments. These vehicles are predominantly autonomous, operating with varying degrees of self-governance. While discussions about autonomous vehicles usually focus on air or ground platforms, USVs are equally significant, albeit less prevalent and commercially adopted. As artificial intelligence technology continues to advance, the maritime transportation sector is striving to enhance safety, efficiency, and profitability. The most recent yearly assessment of marine accidents and incident reports has revealed that navigational accidents, including collisions, contacts, and groundings/stranding, account for 44 percent of all reported incidents [1]. The evolution of the shipping industry has always focused on improving navigation safety and enhancing transportation advantages. Enhancing the safety of vessel navigation has been a significant focus in the realm of marine transportation engineering and is a driving force behind the demand for USVs and their technological requirements. Each year, human mistakes or negligence, like inadequate lookout by the officer on watch (OOW), contribute to numerous marine accidents. The implementation of automated navigation effectively takes over the role of human pilots in managing vessel maneuvers and cargo transport, significantly reducing the likelihood of accidents caused by human error. Currently, autonomous technology is predominantly employed in USVs and submersible robots; however, fully autonomous navigation for cargo ships is not yet achievable. Collision avoidance navigation systems utilize various technologies and are subject to advanced research efforts. USVs must possess the capability to navigate independently and evade collisions with other ships or obstacles. In addition, they should exhibit behavior and functionality reminiscent of manually operated vessels. Hence, it is imperative that USVs are equipped with intelligent techniques for collision avoidance and route planning that ensure their secure operation in dynamic and intricate waterways [2]. The exploration of navigation systems for USVs began in the early 2000s [3]. Table 1 indicates the list of surveys conducted for USV route planning and avoidance of collisions.
Scholars from all around the world have undertaken substantial study of USVs, with a particular emphasis on route planning algorithms like the Dijkstra, A*, genetic, PSO, and other algorithms
[13]. While simulation-based evaluations of collision prevention algorithms and route planning often yield reasonable outcomes, previous studies have encountered numerous challenges when attempting to implement these solutions on real vehicles. As our understanding of science and technology advances, scholars strive to organize and structure the current accomplishments in this field
[14]. Numerous techniques have been devised to address local route planning and avoid collisions. Nonetheless, the majority of these methods have been applied exclusively in familiar surroundings and against stationary obstacles
[15]. The primary objective of numerous practical engineering applications has been to find the most efficient route from an initial point to a desired destination. The cost-effective path of a USV can be assessed by considering factors such as travel time and energy usage. Particularly for long-distance or energy-intensive journeys, minimizing time and energy expenditure becomes crucial in route planning. Whether it involves transportation
[16], cruising, or scientific exploration, vessels tend to favor the most economical path that significantly reduces both travel time and energy consumption
[17]. Significant progress has been made in the field of path planning since the 1990s, with numerous successful endeavors and the development of promising algorithms
[18]. These algorithms can be categorized into classical approaches as well as heuristic approaches
[19]. Classical approaches follow strict procedures and, if possible, can obtain an optimal solution. On the other hand, heuristic approaches come into play when classical approaches become less effective, as they can still find a solution. Examples of heuristic approaches include genetic algorithms
[20], simulated annealing, and evolutionary algorithms. The
Collision Regulations (COLREGS) serve as the fundamental principle for water vehicles, making it imperative for the USV’s route planning algorithm to accommodate these rules. This ensures that the USV does not pose any safety risks to other ships and safeguards its navigation security in public waters. Numerous studies have been conducted by researchers to develop route planning techniques that consider the guidelines set by the COLREGS
[21]. In the contemporary era, simulation plays a crucial role in the development of systems across various engineering domains. Initially employed for addressing design challenges through numerical algorithms in the 1960s, simulation has evolved into the digital age and is seamlessly woven into the entire life cycle of a specific product. This integration spans design, testing, manufacturing, commissioning, operation, and decommissioning phases
[22].
In relation to USVs, the objective of local route planning is to evade unfamiliar dynamic or stationary obstacles. In the following sections, the prominent algorithms used in USV local route planning are reviewed.
2. Rapidly Exploring Random Tree (RRT) Algorithm
The extensively growing random tree (RRT) algorithm was introduced by LaValle
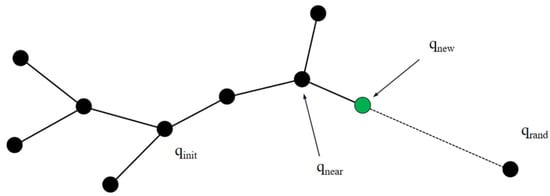
[23]. By utilizing an incremental forward sampling approach, he constructed a search tree and subsequently explored this tree structure to derive a path. Subsequently, as the number of sampled points increases, the algorithm persists at refining the path until reaching the target point or reaching the maximum allowable iterations
[24]. The RRT* algorithm demonstrates progressive refinement, with the path becoming increasingly optimized as the iteration count rises. Although the RRT algorithm is a relatively efficient method that is capable of addressing route planning challenges involving non-holonomic constraints and offers substantial benefits for various aspects, it does not provide assurance of yielding a suitably optimized, feasible path. As a result, numerous enhancements to the RRT algorithm have focused on addressing the issue of path optimization, with the RRT* algorithm being one such endeavor. In
[25], the researchers introduced an innovative technique named PI-DP-RRT, which merges pre-existing automatic identification system (AIS) data and the Douglas–Peucker (DP) compression method for ship trajectory planning. In
[26], the presented approach introduces a path planning strategy that incorporates the impact of environmental disruptions using a Virtual Potential Field RRT* technique. Initially, the virtual potential field RRT* technique was developed to chart the desired path, building upon the foundation of the RRT* algorithm. Subsequently, an anti-environmental disturbance technique was introduced that employs a deep recurrent neural network PI controller. This controller facilitates the unmanned surface vehicle (USV) in mitigating environmental disturbances and preserving its trajectory alignment with the intended path. In another article
[27], to address the problem of conventional route planning methods having path search rules disconnected from the practical maneuvering capabilities of unmanned surface vehicles (USVs), a novel route planning approach called ‘state prediction rapidly exploring random tree (spRRT)’ is introduced. In the context of USV route planning, RRT algorithms face challenges in handling dynamic environments, high computational costs, sensitivity to parameter tuning, and limited adaptability to uncertainty. These limitations can hinder real-time decision making and optimal path generation. Consequently, further research is needed to enhance the efficiency, robustness, and adaptability of RRT-based methods for effective USV navigation.
Figure 1 shows the working mechanism of the RRT algorithm.
Figure 1. The working principle of RRT algorithm
[28].
3. The Artificial Potential Field
This algorithm was first introduced by Khatib; the method was originally designed for mobile robot route planning to achieve smooth trajectories
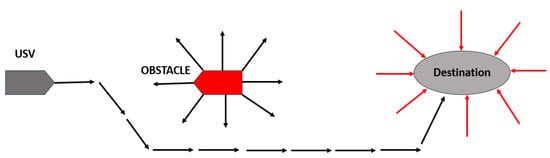
[29]. The core concept involves creating an attractive potential field towards the destination and a repulsive potential field around obstacles. By deriving a gravitational potential field function, the attraction force is gained, and the repulsion potential field function is derived out of repulsion. The algorithm enables real-time path planning for USVs and efficiently avoids dynamic obstacles, enhancing safety and cost-effectiveness. Path optimization techniques, as seen in the discrete artificial potential field (DAPF) method, enhance the calculation of secure routes in both stationary and dynamic obstacle settings, thereby improving overall path accuracy and efficiency. The model prediction strategy and artificial potential field (MPAPF) algorithm effectively tackles traditional APF constraints by addressing head-on and cross-encounter scenarios to ensure USV safety amid intricate conditions. Despite its rapid computation and path optimization techniques, it struggles with local maxima and has challenges with path smoothing, which impacts the quality of global paths, particularly in complex environments. Difficulties persist with identifying target points near obstacles, which hinders effective navigation. While advancements like map expansion improve local route adjustments, issues arise when obstacles are too close to target points, which affects overall navigation efficiency. The combined force, a summation of gravitational and repelling forces, governs the movement of the USVs
[30]. A simulated field with minimal potential energy can be employed to visualize the course taken by a USV as it sets sail from its starting point towards its destination. The USV may deftly avoid high potential energy zones created by barriers by controlling the resulting force.
The APF method is advantageous because it is easy to implement and does not demand substantial computational power. This allows for real-time control of USVs and the ability to prevent collisions. However, the occurrence of local minima is a notable drawback
[31]. Because the resulting force pressing on the USV is balanced in some circumstances, such as when it runs into a U-shaped obstruction, the algorithm may cause the USV to proceed in an endless loop instead of to its intended location. Additionally, because of the fluctuating impacts of opposing barrier gravitational fields, traveling between barriers that are closely spaced may be impossible or result in oscillation
[32]. To address the issue of encountering local minima, additional methods are integrated with artificial potential fields (APFs), such as in
[33]. In a study based on simulation
[34], in order to achieve trajectory planning in real time for automated docking, a novel method known as the ‘extended dynamic window approach’ is presented. This approach utilizes potential fields and incorporates a nonuniform Theta* algorithm to explore global paths while considering potential obstacle risks, thereby avoiding the possibility of being trapped in a local minimum.
Figure 2 shows the working mechanism of the APF algorithm.
Figure 2. The working principle of APF algorithm.
4. Velocity Obstacle
The concept of a velocity obstacle (VO) was initially introduced by Fiorini and Shiller in the year 1998
[35]. VO is a technique for guiding robots in dynamic surroundings by identifying velocities at which a robot would bump an obstacle in the future and should therefore be avoided. These velocities create constrained regions in the velocity space: forming cone-shaped areas specific to each obstacle. By choosing velocities outside of these cones, collisions can be reliably prevented assuming that the robot reaches the new velocity and heading instantaneously and that the obstacles maintain their current velocities and headings. The velocity obstacle (VO) approach and its enhanced iterations offer robust foundations for dynamic obstacle avoidance by integrating obstacle velocity characteristics and optimizing path length and fuel costs. Hybrid algorithms like VO-APF incorporate COLREGS rules and path optimization functions, augmenting safety and path efficiency. Combining the VO algorithm with the ACO algorithm provides globally optimal paths and effective dynamic obstacle avoidance. However, challenges persist for accurately predicting obstacle motion, which hinders effective avoidance strategies. Hybrid algorithms may struggle to generate globally optimal paths and avoid local optima, particularly in intricate environments. While collision avoidance systems improve performance, uncertainties about obstacle motion states can impact the accuracy of predicted information. Continued research is vital to refine these methodologies and address their limitations in navigating complex environments. According to
[36], the utilization of velocity obstacle (VO) algorithms is essential for avoiding collisions with target ships that follow non-linear trajectories, as the algorithms are characterized by time-dependent velocities and probabilistic predictability. Specifically, linear velocity obstacle, probabilistic velocity obstacle, and non-linear velocity obstacle algorithms have been implemented to achieve this objective. In general, the existing methods for detecting potential ship collisions have two main concerns. Firstly, there is a possibility of either overestimating or underestimating the collision candidates. Secondly, the reliability of the results may vary depending on the parameter configurations used in these methods
[37]. The velocity obstacle defines a collection of speeds; this set of speeds signifies that if the velocities of two objects fall within its range, a future encounter is predicted between them. This approach simplifies the detection of potential collision risks. The velocity obstacle has acquired significant recognition in recent years for anti-collision route planning
[38]. It involves constructing a non-linear velocity obstacle zone by deliberating the foreseen trajectories of other vessels. Reference
[27] introduces a time-discrete non-linear velocity obstacle technique to detect potential collisions. Built upon the non-linear velocity obstacle algorithm, it is assessed utilizing historical AIS data. Instead of analyzing traffic data at specific time points, it views ship encounters as processes. Case studies of single ship traffic encounters in waterway settings are conducted and detailed in the research.
5. Dynamic Window Approach Algorithm
The dynamic window approach algorithm is frequently employed as a technique for route planning and was first introduced by Dieter Fox, Wolfram Burgard, and Sebastian Thrun in 1997 in reference
[39]. The dynamic window approach is an often-utilized technique for local route planning. Nonetheless, the conventional application of this algorithm often results in a path that circumvents the outer edges of densely populated obstacle regions. This elongates the distance traveled and brings the path in close proximity to dynamic obstacles
[40]. The dynamic window approach is a method for local route planning that relies on sampling velocities. It involves generating several sets of velocities within the velocity space and then simulating the trajectory of the USV over a defined time span. The performance of these simulated trajectories is assessed using a predetermined evaluation function, allowing for the identification of the most favorable trajectory. Subsequently, the optimal speed associated with this trajectory is chosen for implementation
[24]. In order to avoid the USV getting stuck in local low points following the evasion of dynamic obstacles, Ref.
[41] proposed an improved dynamic window approach (IDWA) that adopts a dynamic selection process for the parent node as a local target. This is a departure from the DWA method, which adheres to a fixed sub-target along the global path. Additionally, to enhance the navigational efficiency of a USV, the IDWA incorporates the lowest cost of the path from the current cell to the goal, which enhances its functionality. This inclusion aids in the assessment of predicted trajectories. In
[42], because previous research in this field had not completely taken into account the influence of oceanic environmental elements, which notably amplify the challenges to controlling USVs and the potential for collisions, this research therefore focused on investigating the effects of two specific oceanic environmental factors—waves and currents—recognizing their substantial impact on USVs. Moreover, they researchers reconfigure a kinematic representation for a USV and revise the assessment criterion for a traditional and pragmatic local route planning technique grounded in the dynamic window approach (DWA). The DWA and its derivatives offer notable advantages, such as enabling real-time trajectory generation through the simulation of various velocity values and integrating a ‘dynamic collision model’ to anticipate future collisions, thereby enhancing operational efficiency by accounting for obstacle movement. Methods like DW-VG and DWA-VO bolster obstacle avoidance by incorporating virtual target points and prioritizing local obstacle navigation, respectively, thereby minimizing data inaccuracies and enhancing operational efficiency. Nonetheless, the DWA algorithms may encounter limitations in accurately discerning global obstacles, resulting in local optimization challenges. Despite attempts to mitigate these drawbacks and improve efficiency, there are persistent difficulties in fully adapting to both global and local maritime obstacles. While strategies like IDWA and the fusion of ACO and DWA aim to elevate navigation efficiency and obstacle evasion, the integration of intricate methodologies may impact real-time performance and introduce computational complexities.
6. Analysis of Algorithms for Local Route Planning
After a literature review of various algorithms for USV local route planning, considering both simulation and real-world scenarios, notable trends emerge, along with respective pros and cons. Among the algorithms listed, a significant portion, including APF-VO, MPAPF, Q-RRT*, IDWA, modified APF, VAPF, enhanced VO, APF, modified VO, and DWA, have primarily been verified through simulation. These algorithms offer several advantages, such as consideration of COLREGS, dynamic obstacles, and effective real-time execution. They are suitable for simulation environments, where controlled testing and validation are feasible. However, their limitation lies in the lack of direct validation in real-world scenarios, which may introduce uncertainty regarding their performance and robustness in practical applications.
Conversely, a few algorithms, such as P-RRT*, COLREG-RRT, and TD-NLVO, have been specifically validated in real-world scenarios, demonstrating their potential for practical implementation. These algorithms offer the advantage of real-world validation, which provides insights into the challenges of actual maritime environments and ensures more reliable performance. However, they may have limitations in terms of scalability or adaptability to dynamic environments.
Future advancements in local route planning algorithms for USVs could involve integrating advanced sensing technologies like LiDAR and radar for more accurate obstacle detection. Incorporating machine learning and artificial intelligence methods can enable algorithms to adapt dynamically to changing environments and enhance route planning decisions. Collaboration among USVs through information exchange can optimize route efficiency and mitigate congestion in shared waterways. Standardized protocols and communication frameworks should be developed to facilitate interoperability among different USV systems and navigation algorithms. Continuous evaluation and testing in diverse conditions are essential to validate algorithm performance and identify areas for improvement. These measures can significantly enhance the safety, efficiency, and adaptability of USVs in navigating complex maritime environments.
In future research, there is a critical need to bridge the gap between simulation and real-world validation. Algorithms should be rigorously tested and refined in both simulated and real-world environments to ensure robustness and reliability across various conditions. Moreover, researchers should prioritize developing algorithms that seamlessly transition from simulation to real-world implementation to address the complexities and uncertainties inherent in maritime environments effectively. Such efforts will contribute to the development of more reliable and adaptable USV local route planning algorithms that are suitable for practical deployment in real-world settings. Table 2 evaluates various algorithms used for local route planning while taking into account the elements determining the best possible route.
Table 2. Features of numerous algorithms employed for USV local route planning.
| Ref. |
Algorithm |
COLREGS |
Dynamic Obstacle |
Static Obstacle |
Effective |
Smooth |
Real Time |
Simulation or Real World |
| [43] |
APF-VO |
Yes |
Yes |
No |
Yes |
No |
Yes |
Simulation |
| [44] |
MPAPF |
Yes |
Yes |
No |
Yes |
No |
Yes |
Simulation |
| [45] |
Q-RRT* |
No |
Yes |
Yes |
No |
Yes |
Yes |
Simulation |
| [41] |
IDWA |
No |
Yes |
No |
Yes |
Yes |
Yes |
Simulation |
| [46] |
Modified APF |
Yes |
Yes |
Yes |
Yes |
Yes |
Yes |
Simulation |
| [47] |
P-RRT* |
No |
Yes |
Yes |
No |
Yes |
No |
Real world |
| [48] |
VAPF |
No |
Yes |
Yes |
Yes |
Yes |
Yes |
Simulation |
| [49] |
Enhanced VO |
Yes |
Yes |
Yes |
Yes |
Yes |
Yes |
Simulation |
| [50] |
COLREG-RRT |
Yes |
Yes |
No |
Yes |
Yes |
Yes |
Real world |
| [51] |
APF |
Yes |
Yes |
Yes |
Yes |
No |
Yes |
Simulation |
| [37] |
TD-NLVO |
No |
Yes |
No |
Yes |
Yes |
Yes |
Real world |
| [52] |
Modified VO |
Yes |
Yes |
No |
Yes |
Yes |
Yes |
Simulation |
| [53] |
DWA |
Yes |
Yes |
No |
Yes |
No |
Yes |
Simulation |
| [54] |
DWA-A* |
No |
Yes |
No |
Yes |
No |
No |
Simulation |
 +1 credit
+1 credit