Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Yousuf Dinar | -- | 1313 | 2024-03-25 06:37:10 | | | |
| 2 | Camila Xu | Meta information modification | 1313 | 2024-03-25 09:29:53 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Dinar, Y.; Qurashi, M.; Papantoniou, P.; Antoniou, C. Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic. Encyclopedia. Available online: https://encyclopedia.pub/entry/56468 (accessed on 26 July 2026).
Dinar Y, Qurashi M, Papantoniou P, Antoniou C. Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic. Encyclopedia. Available at: https://encyclopedia.pub/entry/56468. Accessed July 26, 2026.
Dinar, Yousuf, Moeid Qurashi, Panagiotis Papantoniou, Constantinos Antoniou. "Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic" Encyclopedia, https://encyclopedia.pub/entry/56468 (accessed July 26, 2026).
Dinar, Y., Qurashi, M., Papantoniou, P., & Antoniou, C. (2024, March 25). Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic. In Encyclopedia. https://encyclopedia.pub/entry/56468
Dinar, Yousuf, et al. "Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic." Encyclopedia. Web. 25 March, 2024.
Copy Citation
Different methodologies are being used to study the effects of autonomous vehicles (AVs) in mixed traffic to exhibit the interactions between autonomous and human-driven vehicles (HVs). Microscopic simulation tools are popular in such an assessment, as they offer the possibility to experiment in economical, robust, and optimistic ways. A lack of reliable real-world data (also known as natural data) to calibrate and evaluate the connected autonomous vehicle (CAV) simulation model is a major challenge.
autonomous vehicle
connected autonomous vehicle
traffic performance
sensitivity analysis
1. Introduction
Despite the fact that the number of road accidents is steadily leveling off and generally on the decline due to the systematic use of technology, some nations continue to experience incidents caused by human error. For example, the United States of America faces increasing problems from traffic accidents [1]. According to one study, human factors account for 90–95 percent of all accident incidents, with around 60 percent of those accidents directly attributable to human mistakes [2], making it a main cause of traffic incidents. Autonomous vehicles (AVs) are driverless vehicles that run on a sensor system and get notified based on their proximity. Furthermore, connected autonomous vehicles provide additional safety and awareness through various connectivity features such as vehicle to vehicle (V2V) and vehicle to infrastructure (V2I).
Manufacturers and experts claim that autonomous vehicles are guaranteed to overcome human errors and increase safety for humans in numerous instances [3][4][5]. Additionally, autonomous vehicles provide an increased road capacity [6], environmental friendliness, and congestion reduction [7] by enabling platoon building, V2V and V2I communications, and the highway may be made more comfortable by, among other things, decreasing the number of vehicle stops at junctions [8]. Among many other features, cooperative adaptive cruise control (CACC) and adaptive cruise control (ACC) affect the travel experience [9]. One of the numerous benefits of CAVs is that they communicate and share information with other entities, such as other cars, infrastructure, or traffic systems, which reduces response times and shortens safety headways compared with human-driven vehicles. The capacity of the road is increased when there is little space between two subsequent road agents. Other benefits, including interacting with infrastructures to get early warnings of accidents, traffic, or natural disasters are essential to optimizing the use of travel time. To understand the influence on the actual world, these behaviors must be replicated in a simulation model [9]. According to research in the past, it is predicted that C/AVs will improve traffic performance while reducing emissions and energy use [9][10].
Microscopic traffic simulations may be utilized to perceive different phases of the introduction of automation on the streets alongside conventional cars to comprehend the impacts of AVs and CAVs on the present transportation system prior to real-world deployment. Effective modeling techniques are needed to assess the effects of these significant changes [9][11]. The driving behavior settings in any traffic simulator also play crucial roles in how accurately the simulation models reflect reality.
Even today, it is still not possible to obtain publicly available, real traffic data from autonomous vehicles. This gap hinders the calibration and validation of the connected autonomous vehicle (CAV), two important elements of microscopic traffic simulation. To overcome this gap, this study assumes that both CAVs and AVs would behave similarly to human-driven vehicles. There are traffic volumes and speeds from human-driven vehicles which could be used for C/AVs as well from the assumption of their similarity. The characteristics of driving behaviors for connected and/or autonomous vehicles (C/AVs) need to be determined according to distinct driving behaviors, such as aggressive, normal, and safe [12], as reflecting on three different human driving patterns makes it more humanlike than other C/AVs. Vehicles will decide which parameters to follow from their permissible range in accordance with their regulated driving behaviors. The direct user selection of these driving behaviors is also possible through external connections, such as V2V, V2I, and emergency states. These behaviors exhibit wildly disparate responses to roads and traffic. A safe driving behavior means the vehicle is not permitted to drop the safe distance below the authorized limits; however, an aggressive driving behavior means the vehicle may have a smaller safe driving distance with an increased acceleration, resulting in C/AVs that resemble human behaviors [12][13][14].
2. Humanlike Behaviors of Connected Autonomous Vehicles Affect Traffic Conditions in Mixed Traffic
Different functions (event script files) are currently attached in the simulator to implement these C/AV features in the microscopic simulation. There are many functionalities in VISSIM 11 or later versions to explore C/AVs [12]. Platoon building, signal influence, and V2V and V2I connectivities are all included in VISSIM 2020 and are implemented both universally (using GUI) and exclusively (using COM) [12][14][15]. In the VISSIM interface, the Wiedermann 74 does not provide many options for customized modeling, so the standard method for modeling C/AVs can be used to build modified versions of the Wiedermann 99 [12]. Similar research with fewer parameters from Wiedermann 74 suggested that as the AV inflow increases, the capacity of roads will become quite congested [6]. The C/AVs that resemble human-driven vehicles are a subset of traditional driving behaviors and can be acquired with the right legal framework to correspond with various autonomous driving behaviors. In order to improve the automation features in the VISSIM interface, some extensively created simulator-integral and user-defined parameters are completely dedicated to match the characteristics of AVs and CAVs [3][12][13][14][16]. Additionally, numerous C/AV features are modeled using external script files. The calibration and validation are integral parts in the microscopic traffic simulation to create a realistic simulation. The one of the major challenges in connected and/or autonomous vehicles (C/AVs) is the lack of a measure of effectiveness from the real world to do the calibration. It is also difficult to find a set of calibration parameters that matches the modeling and simulation technique for the C/AVs [12][17][18]. The time-to-time traffic performance and safety proved to be great indicator for optimistic research studies focusing on C/AVs [19]. The emissions are also an indicator in many studies, but the emission calculation significantly varies over the years, based on individual software and calculation techniques.
Previous studies showed that a higher influx of CAVs in mixed traffic creates higher quality traffic conditions. It is to be expected that in the first stage of the implementation of C/AVs, the road capacity and thus, the speed of vehicles, will drop. With more of these kinds of vehicles on the road, the status of the mobility, road safety, and environmental conditions will improve due to various benefits of AV technologies such as platooning [20][21]. Figure 1 shows three ternary plots which depict three different traffic demand levels, where the color indicates the harmonic average speed over the network. A high traffic demand leads to a deterioration of traffic conditions, as the number of interacting vehicles gradually increases and reaches technical limits [9][10].
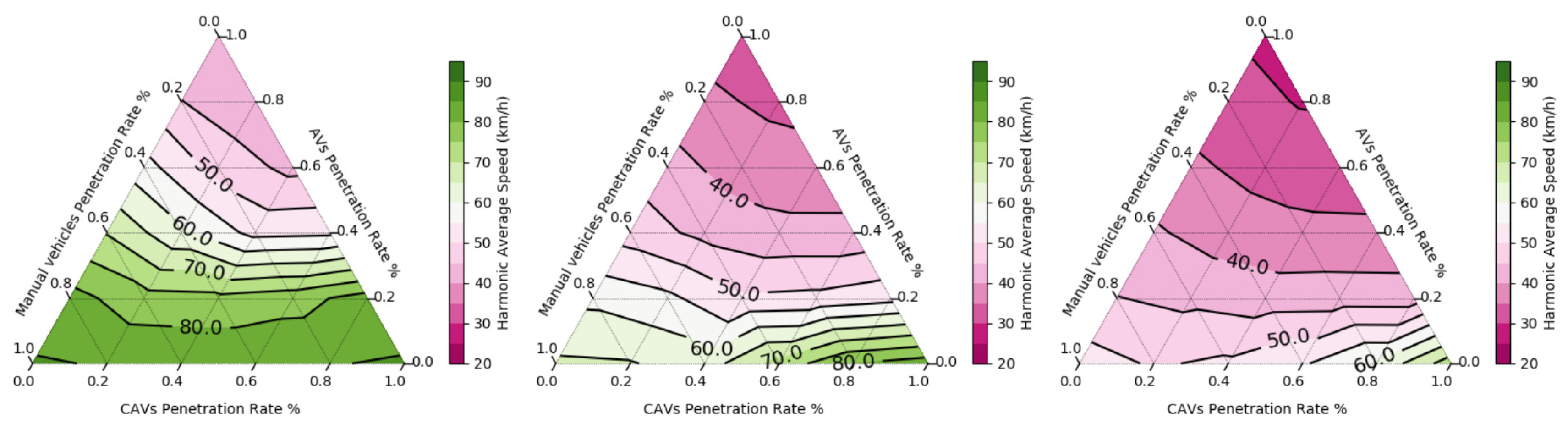
Figure 1. Harmonic speeds over the networks for various traffic demand levels: 80% of peak demand, 100% of peak demand, and 120% of peak demand, respectively [9].
Both the urban motorway and the freeway benefit greatly from automation features like connectivity to other vehicles and infrastructure, emergency stops, the formation of vehicle platoons, slowing down before a traffic signal, and automatic driving behaviors [6][22]. Researchers showed that in the initial stages of implementation, C/AVs should be self-driven and self-sufficient, as adaptive infrastructure development will take some time to fully absorb the connectivity features [23]. In such an early phase of development and implementation, AVs will be ahead of CAVs in terms of functionalities. In summary, research methods and simulation processes of autonomous vehicles differ for car-following behaviors, lane changing behaviors, calibration methods, planned performance indicators, etc. Because of a lack of real-world data, autonomous vehicles are difficult to calibrate, and behaviors are also unpredictable, so it is safe to consider their performance to be akin to humanlike driving maneuvers. In theory, the traffic performance can be improved by using CAVs, but there is an obvious technical limit.
References
- International Transport Forum. IRTAD Road Safety Annual Report 2022. OECD/ITF. 2022. Available online: https://www.itf-oecd.org/sites/default/files/docs/irtad-road-safety-annual-report-2022.pdf (accessed on 9 August 2023).
- Forward, S. Driving Violations: Investigating Forms of Irrational Rationality; Uppsala Universitet: Uppsala, Sweden, 2008.
- Bohm, F.; Häger, K. Introduction of Autonomous Vehicles in the Swedish Traffic System. Effects and Changes Due to the New Self-Driving Car Technology; Uppsala University: Uppsala, Sweden, 2015.
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183.
- Iranmanesh, S.; Abkenar, F.S.; Jamalipour, A.; Raad, R. A Heuristic Distributed Scheme to Detect Falsification of Mobility Patterns in Internet of Vehicles. IEEE Internet Things J. 2022, 9, 719–727.
- Park, J.E.; Byun, W.; Kim, Y.; Ahn, H.; Shin, D.K. The Impact of Automated Vehicles on Traffic Flow and Road Capacity on Urban Road Networks. J. Adv. Transp. 2021, 2021, 8404951.
- Rigole, P.-J. Study of a Shared Autonomous Vehicles Based Mobility Solution in Stockholm; KTH Royal Institute of Technology: Stockholm, Sweden, 2014.
- Li, Z.; Chitturi, M.V.; Yu, L.; Bill, A.R.; Noyce, D.A. Sustainability Effects of Next-Generation Intersection Control for Autonomous Vehicles. Transport 2015, 30, 342–352.
- Makridis, M.; Mattas, K.; Ciuffo, B.; Raposo, M.A.; Toledo, T.; Thiel, C. Connected and Automated Vehicles on a freeway scenario. Effect on traffic congestion and network capacity. In Proceedings of the 7th Transport Research Arena TRA, Vienna, Austria, 16–19 April 2018.
- Mattas, K.; Makridis, M.; Hallac, P.; Raposo, M.A.; Thiel, C.; Toledo, T.; Ciuffo, B. Simulating deployment of connectivity and automation on the Antwerp ring road. IET Intell. Transp. Syst. 2018, 12, 1036–1044.
- Liu, H.; Xiao, L.; Kan, X.D.; Shladover, S.E.; Lu, X.Y.; Wang, M.; Schakel, W.; van Arem, B. Using Cooperative Adaptive Cruise Control (CACC) to Form High-Performance Vehicle Streams; Final Report, California PATH Program; University of California: Berkeley, CA, USA, 2018.
- Sukennik, P. D2.5-Micro-Simulation-Guide-for-Automated-Vehicles 1.0; European Commission: Brussels, Belgium, 2018.
- Zeidler, V.; Sebastian, B.H.; Kautzsch, L.; Vortisch, P.; Weyland, C.M. Simulation of Autonomous Vehicles based on Wiedemann’s Car Following Model in PTV VISSIM. In Proceedings of the 98th Annual Meeting of the Transportation Research Board (TRB), Washington, DC, USA, 7–11 January 2018.
- Atkins, Department for Transport. Research on the Impacts of Connected and Autonomous Vehicles on Traffic Flow. Stage 2: Traffic Modelling and Analysis; Technical Report, Version 2.1; Department of Transport: Sacramento, CA, USA, 2016; p. 5145311.
- PTV. VISSIM 5.30-05 User Manual, Zuletzt Geprüft am 14.01.2020. 2011. Available online: https://www.academia.edu/36760341/VISSIM_5_30_05_User_Manual (accessed on 20 January 2024).
- Toledo, T. Integrated Driving Behavior Modelling. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2003.
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303.
- Trommer, S.; Kolarova, V.; Fraedrich, E.; Kröger, L.; Kickhöfer, B.; Kuhnimhof, T.; Lenz, B.; Phleps, P. Autonomous Driving. The Impact of Vehicle Automation on Mobility Behavior; Institute for Mobility Research: Berlin, Germany, 2016.
- Sadid, H.; Qurashi, M.; Antoniou, C. Simulation-based Optimization of Autonomous Driving Behaviors. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; Sadid, H., Qurashi, M., Antoniou, C., Eds.; IEEE: Piscataway, NJ, USA, 2022; pp. 4101–4108.
- Ahmed, H.U.; Huang, Y.; Lu, P.; Bridgelall, R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities 2022, 5, 382–404.
- Tettamanti, T.; Varga, I.; Szalay, Z. Impacts of Autonomous Cars from a Traffic Engineering Perspective. Period. Polytech. Transp. Eng. 2016, 44, 244–250.
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transp. 2017, 2017, 3082781.
- Parmar, R. Impact of Driverless Cars on Urban Environment and Future of Mobility. Master’s Thesis, Architecture Urban Planning Construction Engineering, Politecnico di Milano, Milan, Italy, 2018.
More
Information
Subjects:
Transportation
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
955
Revisions:
2 times
(View History)
Update Date:
25 Mar 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No