Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Cosmin Grigoras | -- | 7189 | 2024-03-14 11:36:28 | | | |
| 2 | Mona Zou | Meta information modification | 7189 | 2024-03-18 09:55:40 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Grigoras, C.C.; Zichil, V.; Ciubotariu, V.A.; Cosa, S.M. Machine Learning, Mechatronics, and Stretch Forming. Encyclopedia. Available online: https://encyclopedia.pub/entry/56256 (accessed on 25 June 2026).
Grigoras CC, Zichil V, Ciubotariu VA, Cosa SM. Machine Learning, Mechatronics, and Stretch Forming. Encyclopedia. Available at: https://encyclopedia.pub/entry/56256. Accessed June 25, 2026.
Grigoras, Cosmin Constantin, Valentin Zichil, Vlad Andrei Ciubotariu, Stefan Marius Cosa. "Machine Learning, Mechatronics, and Stretch Forming" Encyclopedia, https://encyclopedia.pub/entry/56256 (accessed June 25, 2026).
Grigoras, C.C., Zichil, V., Ciubotariu, V.A., & Cosa, S.M. (2024, March 14). Machine Learning, Mechatronics, and Stretch Forming. In Encyclopedia. https://encyclopedia.pub/entry/56256
Grigoras, Cosmin Constantin, et al. "Machine Learning, Mechatronics, and Stretch Forming." Encyclopedia. Web. 14 March, 2024.
Copy Citation
The complexity of machine learning, mechatronics, and stretching forming is well known. Combining them was, is, and will be a necessity as they are closely interconnected disciplines within the field of manufacturing. It is a fact that in any industry, high productivity is achieved with the use of automated manufacturing processes. Intensive work was conducted throughout the year, and extraordinary techniques, equipment, and processes were upgraded or developed. Nevertheless, there are still issues that require optimal solutions.
autonomous mechatronic system
processing precision
flexible manufacturing systems
digital processing
fracture prediction
self-organizing manipulators
1. Summary of the 2010s—More Industrial Processes Require Improved Algorithms
1.1. Machine Learning Advances
Machine learning algorithms have become essential in modern technology, providing robust tools for data processing and extracting valuable insights across various domains. The algorithms behind the machine learning umbrella are divided into four categories, as indicated in Table 1. The classification takes into consideration each class’s ability to analyze the input data as being labeled or not labeled. Supervised learning, which uses labeled datasets for classification and prediction tasks, includes methods like linear regression, logistic regression, decision trees, Naïve Bayes, support vector machines (SVM), k-nearest neighbors (kNN), and ensemble learning techniques [1][2][3][4][5][6][7][8]. Semi-supervised learning, which uses both labeled and unlabeled data, includes techniques like pseudo-labeling and semi-supervised generative adversarial networks (SGAN), which can revolutionize tasks like image classification and interpreting unfiltered data streams [9][10][11]. Unsupervised learning, on the other hand, uses algorithms that independently analyze and group unlabeled data, uncovering concealed patterns without human involvement. These algorithms include K-means clustering, hierarchical agglomerative clustering (HAC), Density-Based Spatial Clustering of Applications with Noise (DBSCAN), and principal component analysis (PCA) [12][13][14][15][16]. Reinforcement learning, a framework for sequential decisions in uncertain situations, uses algorithms like Q-learning, SARSA, Deep Q-Network (DQN), and Deep Deterministic Policy Gradient (DDPG) in applications like traffic control, algorithmic trading, and intelligent robotics [17][18][19][20][21]. Machine learning algorithms have a profound influence across various sectors, fostering creativity and enabling us to address complex problems with better effectiveness and insight.
Table 1. Machine learning algorithms, purpose, and applicability.
| Machine Learning Algorithms | Purpose | Applicability | |
|---|---|---|---|
| Supervised Learning (uses labeled datasets to train algorithms to classify and predict outcomes [1]) |
linear regression [2] | finds a linear relationship between one or more predictor(s) | traditional method for evaluating trends and making predictions |
| logistic regression [3] | analysis and classification of binary and proportional response data sets | widely used in data mining | |
| decision tree [4] |
repeatedly performing tests on the input x, where the outcome of each test determines the next test until f(x) is known with certainty | mostly used in statistics and data mining | |
| Naïve Bayes [5] |
finds the probability of an event occurring considering the probability of another that occurred | mostly used for text classification, spam filtering | |
| support vector machines (SVM) [6] |
classification strategy minimizes the classification errors of the training data and obtains a better generalization ability | mostly used for data mining, pattern recognition | |
| k-nearest neighbors (kNN) [7] |
classify unlabeled observations by assigning them to the class of the most similar labeled examples | mostly used for intrusion detection, financial market prediction | |
| ensemble learning techniques [8] |
generated by multiple datasets by bootstrapping the training data and then developing models based on the individual datasets and making predictions using these models | mostly used for predicting crop yield, mapping natural hazards, or land surface temperature | |
| Semi-supervised Learning (uses both unlabeled and labeled data [9]) |
pseudo labeling [10] | applying pseudo-labels to samples in the unlabeled set by using a model trained on the combination of the labeled samples and any previously pseudo-labeled samples and iteratively repeating this process in a self-training cycle | mostly used for image classification |
| semi-supervised generative adversarial network (SGAN) [11] | extract useful information from the unlabeled process data |
used in interpreting unfiltered, noise data | |
| Unsupervised Learning (analyses and clusters unlabeled data to discover hidden patterns or data grouping without human intervention [12]) |
K-means clustering [13] |
categorized as a partitional clustering algorithm; partitioning given datasets into clusters involves finding the minimum squared error between the various data points in the data set and the mean of a cluster and then assigning each data point to the cluster center nearest to it | used in medical science, manufacturing, robotics, the financial sector, privacy protection, artificial intelligence, urban development, aviation, industries, sales, marketing |
| hierarchical agglomerative clustering (HAC) [14] | can yield impressive and rather easily readable results concerning clustering and classification of general building information/dataset | business intelligence, image pattern recognition, web search, biology, and security | |
| Density-Based Spatial Clustering of Applications with Noise (DBSCAN) [15] | performs clustering by finding different density regions that depart from each other | used in data analysis and pattern recognition | |
| principal component analysis [16] |
versatile statistical method for reducing a cases-by-variables data table to its essential features, called principal components | population genetics, market research, quantitative finance |
|
| Reinforcement Learning (sequential decision-making problems that are typically under uncertainty, mimicking how we, as humans, learn [17]) |
Q-learning [18] |
a simple way for agents to learn how to act optimally in controlled Markovian domains | used in news recommendations, online web system auto-configuration, traffic control signal |
| state–action– reward–state– action (SARSA) [19] |
has faster convergence characteristics but not lower final performance than Q-learning | robotics, artificial intelligence, and mechatronics control | |
| Deep Q-Network (DQN) [20] | combines reinforcement learning with deep neural networks | used for algorithmic trading | |
| Deep Deterministic Policy Gradient (DDPG) [21] | explores the environment and makes action decisions | intelligent robotics | |
In a paper published in 2010, R. Smith et al. introduced a learning classifier system (LCS) called MILCS (“my LCS”). This system utilizes mutual information as a measure of fitness feedback. MILCS is designed for supervised learning and has been compared to other LCSs such as XCS (accuracy-based classifier system), UCS (unconfined compressive strength), GAssist (machine learning genetic algorithm), BioHEL (evolutionary learning system designed to handle large-scale bioinformatic datasets), C4.5 (used in data mining as a decision tree classifier), and Naïve Bayes in various studies. MILCS can assist in identifying default hierarchies, a unique characteristic of LCSs [5]. In the same year, G. Jeong et al. contributed with a novel approach to pattern recognition. His work explores the utilization of feature feedback, with a specific emphasis on its implementation in face recognition. Conventional approaches in pattern recognition utilize methods such as PCA (principal components analysis) and LDA (linear discriminant analysis) to extract features for classification purposes. On the other hand, this approach examines the extracted characteristics in the original space through the use of feature feedback. Through the process of mapping the extracted features back to the original space, it becomes feasible to pinpoint the essential elements of the original data that play a significant role in classification. The results of this study indicate higher accuracy rates in classification, along with the possibility of decreased complexity and a decreased requirement for sensors [22].
In 2011, advanced algorithms were developed to address transportation challenges. In their study, C. Dai et al. thoroughly investigated the traction system of a permanent magnet electrodynamic suspension (EDS) train. This particular train operates in synchronous traction mode and makes use of long stators and track cables. A proposed system aims to detect the speed and position of the train’s feedback end. The EDS train’s method of measurement produces position signals that may be affected by vibrations and track connections, resulting in irregular and noisy data. To address this issue, a new algorithm is presented that focuses on the filtering properties of a specific type of track differentiator. This algorithm, known as the linear discrete track-differentiator filtering algorithm, aimed to analyze and optimize the performance of the track differentiator and its associated group [23]. Another approach in the field of transportation was conducted by H. Hou et al., who explored a novel approach for its time to enhance the efficiency of an intelligent transportation system (ITS) by accurately identifying the intentions of drivers. Three models have been developed using the continuous hidden Markov model (CHMM) to distinguish between the intention to change lanes to the left or right and the intention to continue driving in the current lane. Participants engage in lane change maneuvers and lane-keeping maneuvers using driving simulators while collecting and analyzing various parameters associated with lane change behavior [24].
In 2012, A. Nebot et al. conducted research that led to the development of a genetic fuzzy system (GFS). This system is designed to learn discretization parameters using the fuzzy inductive reasoning (FIR) methodology and the linguistic rule FIR (LR-FIR) algorithm. The goal of the GFS is to obtain precise predictive models and decision support models by learning the fuzzification parameters of FIR and LR-FIR approaches [25].
A creative strategy that integrates functional neurophysiology with elements of distributed computing to investigate the state of consciousness. In 2015, S. Bagchi presented a model that handles the intricacies of consciousness and memory development, node classification, and the hierarchical structure of distributed computing nodes. The model showcases its adaptability to bio-inspired distributed computing structures through numerical simulations using various choice functions. His work suggests that the model shows promise in its application to bio-inspired structures and that the development of consciousness is influenced by various environmental stimuli [26]. Understanding and addressing classification problems is a crucial focus in the field of machine learning [27].
Utilizing image-based control, also known as point-and-click control, offers a wide range of advantages in human–robot interactive applications such as telerobotics, remote supervisory, and unmanned systems. This control mode is designed to provide users with a seamless experience, allowing them to effortlessly issue commands without any concerns. It is especially effective for remote applications [28].
In a recent publication, Z. Liu et al. introduced a method for accurately measuring the size of sizable objects through the utilization of a mobile vision system. This technique, introduced in 2015, utilizes a binocular vision sensor and a wide-field camera to develop a 3D scanning sensor. To conduct the measurements, several planar targets are strategically placed around the object. The collected local 3D data are then combined and aligned within a global coordinate system [29].
In 2017, M. Lepot et al. published an in-depth review that has been carried out on various interpolation techniques used to fill gaps in time-series data. The paper focused on evaluating their efficacy and measuring the associated uncertainties. Although numerous techniques are available, the computation of uncertainties for interpolated values is rarely carried out. The work presents algorithms that deal with the estimation of uncertainties surrounding interpolated and extrapolated data [30].
Machine learning techniques were also being used in surveillance systems for pipeline monitoring. In 2017, J. Tejedor et al. thoroughly examined the difficulties involved in implementing and evaluating DAS+PRS for monitoring pipeline threats. The combination of distributed acoustic sensing (DAS) and a pattern recognition system (PRS) is increasingly being used in pipeline surveillance systems to detect and classify potentially dangerous incidents [31]. These advancements have resulted in numerous practical uses in both industry and society. In 2018, C. Chang et al. published a review-type paper titled “A Review of Artificial Intelligence Algorithms Used for Smart Machine Tools”. The paper discusses various aspects related to the current state of AI algorithms and their applications in smart machine tools. The AI methods are classified into different types of learning algorithms, including deep learning, meta-learning, unsupervised learning, supervised learning, and reinforcement learning. These algorithms were a part of models that were able to detect issues in mechanical components. AI techniques are beginning to be used in various applications, including smart machine tools, intelligent manufacturing, cyber–physical systems, mechanical components prognosis, and smart sensors. Several AI algorithms are used to operate advanced machine tools and achieve accurate results [32].
In 2019, S. Lui et al. proposed a solution that explores autonomous machine reading comprehension (MRC). The paper highlights the importance of autonomous systems in addressing environmental unpredictability [33]. “Machine Learning and Deep Learning Methods for Intrusion Detection Systems: A Survey” by H. Liu et al. examines, a year later, an intrusion detection system (IDS) classification system that employs data objects as the main metric for classification. This framework has been developed with a focus on assisting cybersecurity researchers in gaining a comprehensive understanding of IDSs, their concepts, and their classification [34]. Machine learning systems were progressively gaining prevalence at this juncture, leading to an increased societal dependence on algorithms. Nevertheless, the precision of decision support systems remains highly intricate, with their internal reasoning remaining opaque. Even the most knowledgeable individuals struggle to comprehend the mechanisms behind these systems’ predictions, which is briefly presented in Figure 1. With the emergence of new regulations and stringent industries, it has become imperative to have the ability to question, comprehend, and have confidence in machine learning systems. Understanding these systems is essential, and scientists have been dedicated to creating models and techniques to elucidate their functioning [35].
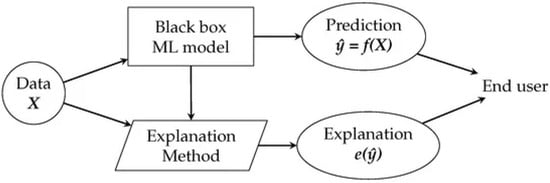
Figure 1. Machine learning pipeline [35].
The selection of a manufacturing process to achieve the desired geometry of a metal part currently lacks structure and is heavily dependent on human expertise. Furthermore, the automation of metal forming process classification and design is still an ongoing challenge. In the following study, machine learning was used to determine the manufacturing process that could manufacture a part solely based on its final shape. Different configurations of neural networks were evaluated using different methods to represent geometric data. Mapping the geometric properties, a highly effective classifier achieved an accuracy of 89% using a deep convolutional neural network. Due to its exceptional precision, automated systems have the potential to perform this step between design and manufacturing, eliminating the requirement for human knowledge in selecting the most suitable forming method for each product [36].
1.2. Mechatronics
Mechatronics subsystems include mechanical and electrically powered systems consisting of a range of components designed to fulfill specific functions, as indicated in Table 2. Various mechanisms provide linear and rotational movements in mechanically powered subsystems. These include cylinders that use pneumatic or hydraulic power, motors that run on air or hydraulic power, and engines that rely on combustion or steam. These systems utilize various mechanical components, including rolling-element bearings, cams, gears, belts, and springs, to ensure accurate operation and efficient force transmission. Electrically powered subsystems utilize various mechanisms for both linear and rotational motion. In addition, a variety of sensors, including proximity, photoelectric, and pressure sensors, are combined with control hardware like switches, relays, and PLCs to effectively manage and regulate operations [37]. The control software, along with the human–machine interfaces, enhances the functionality of these hardware components, ensuring efficient interaction and control [38].
| Subsystems | Global Component | Particular Component | |
|---|---|---|---|
| Electrotechnical components |
Mechanically powered subsystems | linear movement | pneumatic/hydraulic cylinders |
| rotational movement | air/hydraulic motors, combustion/steam engines | ||
| motion machine parts | rolling-element bearings (ball, roller, needle linear bearings), plain bearings, ball joints, leadscrew, ball screw, cams, gears, belts, pulleys, chains, sprockets, springs, | ||
| Electrically powered subsystems | linear movement | electric actuators, solenoids, shape memory alloys | |
| rotational movement | servo/stepper motors | ||
| sensors | proximity, photoelectric, temperature, pressure sensors, limit switch, rotary encoders, machine vision | ||
| Control subsystems | control hardware | switches, relays, PLCs, power management hardware (PMH) |
|
| control software | human–machine interface | ||
| End effector | parallel mechanisms, unfolding mechanisms, and series-parallel mechanisms | ||
In 2012, S. Chen et al. investigated the utilization of model-free variable structure control in sensor–actuator systems. In this method, the system relies solely on the online input and output without any reliance on the mathematical model of the system. The issue is addressed from a perspective of optimal control, and the control law is derived through analytical methods based on the principle of optimality. Simulations were performed to showcase the efficacy and efficiency of the suggested approach [40].
In 2013, a group of researchers, M. Fontana, F. Salsedo, and M. Bergamasco, introduced a new technique for determining the rotation angle of a shaft without the need for direct physical contact. The technique utilizes affordable components that can be seamlessly incorporated into a rotary joint. The principle is based on the rotation of a small magnet and the use of at least one Hall effect sensor. Extensive efforts were made to optimize the parameters, ensuring that the model exhibits linearity within a specific range of angles [41].
Z. Liu et al. introduced a methodology for accurately measuring the size of sizable objects through the utilization of a mobile vision system. This technique, introduced in 2015, utilizes a binocular vision sensor and a wide-field camera to develop a 3D scanning sensor. To conduct the measurements, several planar targets are strategically placed around the object. The collected local 3D data are then combined and aligned within a global coordinate system [42].
In 2019, J. Chen et al. provided a comprehensive overview of the most recent advancements in autonomous systems. The exploration starts with an analysis of the definition, modeling, and system structure of autonomous systems. The article presents the possible incorporation of autonomous systems with cutting-edge technologies like the Internet of Things, Big Data, Over-the-Air, and federated learning. Following the attainment of complete autonomy, this article presents a brief analysis of the subsequent steps that ensue [43].
The identification of linear systems is described in detail by L. Ljung. This article explores the traditional methods used in scientific research, including parametric methods such as maximum likelihood and prediction error methods, as well as non-parametric methods like spectral analysis [44]. In a research paper titled “Experimental Investigations on Self-Bearing Motors with Combined Torque and Electrodynamic Bearing Windings”, V. Kluyskens et al. discusses the ability of multifunction windings to generate electrodynamic centering forces and driving torque without the need for additional electronics. An investigation was conducted to measure the electromotive force (EMF) of a prototype device operating under controlled conditions. The measured radial forces generated by the electrodynamic bearing and the drive torque closely align with the predictions of the model. The research demonstrates the simultaneous generation of passive guidance forces and torque using a single winding [45].
The enhancement in accuracy of the roboforming process is essential, as it is utilized for the production of sheet metal components in limited quantities and prototypes. It utilizes two collaborating industrial robots for the kinematic shaping of sheet metal workpieces. Eliminating workpiece-specific tooling and dies is a significant advancement. The geometrical design of sheet metal workpieces offers a significant amount of flexibility. The precision of incremental sheet-forming methods is a significant constraint that restricts their widespread use in industrial applications. To overcome these limitations, a potential solution was put forward: utilizing a machine learning approach to enhance the precision of geometric measurements in incremental sheet manufacturing processes. An innovative approach was implemented, utilizing a cutting-edge learning strategy that leverages reinforcement learning techniques [46][47][48].
1.3. Stretch Forming as a Computer-Aided Manufacturing Process
The stretch-forming processes include a range of techniques designed to meet specific needs and achieve desired results, at it is indicated in Table 3. A common method in the field of scientific research involves the use of stationary gripping jaws while the forming block or die is pushed into the material [49][50][51][52][53]. In tangential stretch forming, both gripping jaws and die can move; this results in a biaxial process [54][55][56][57][58]. With remarkable flexibility and improved formability, incremental stretch forming allows for the production of intricate three-dimensional shapes [46][47][48][59][60][61][62]. Multi-point stretch forming, or flexible die stretch forming, involves the use of adaptable dies and elastic cushions, enabling the manufacturing of intricate 3D sheet metal components [63][64][65][66][67][68][69][70].
Table 3. Stretch-forming classification and particularities.
| Stretch-Forming Process Types | Particularities |
|---|---|
| Tangential stretch forming [54] |
the gripping jaws and forming block/die can move |
| the sheet is pre-strained, after which it is stretched | |
| it is considered a two-step biaxial process | |
| Multi-point stretch forming/ flexible die stretch forming [70][71] |
it uses reconfigurable dies and elastic cushions to manufacture 3D sheet metal parts |
| it is considered a flexible manufacturing process | |
| stress and strain are distributed more uniformly, as the elastic cushions help to a certain degree |
|
| Incremental stretch forming (incremental sheet forming) [48][59][70] |
it offers flexibility and increased formability, resulting in complex 3D shapes |
| it is a hybrid manufacturing process, combining classical stretch forming with incremental sheet forming |
|
| the sheet experiments only localized plastic deformation | |
| Simple stretch forming [67][68][69] |
the gripping jaws are stationary; only the forming block/die moves it has a large contact area; only tensile load has to be largely considered it can be used in large parts, such as airplane fuselage |
In a study published in 2011 by S. Kurukuri et al., a physically based material modeling approach is proposed to simulate stretch forming with intermediate heat treatments and predict the resulting outcomes. The Vegter yield function is used to consider the anisotropic and biaxial behavior of the aluminum sheet. The simulation of stretching air-craft skins with intermediate heat treatments using the FEM model and experimental findings produces favorable results. Through the application of physics-based material modeling, researchers have discovered a more effective approach compared to other methods [72].
Springback is a common issue in sheet metal forming, especially during stretching and bending operations. It occurs due to the elastic behavior of materials and can lead to shape inaccuracies. In their study, H. Schilp et al. focus on three crucial factors: the stretching technique, the stretching direction, and the duration of stretching. The springback factor is commonly used as a benchmark to assess swing and v-bending processes in finite element simulations [58].
Multi-point stretch forming (MPSF) is a method employed in the shaping of outer skin parts for aircraft. This technique utilizes a multi-point stretching die (MPSD) in place of the conventional fixed shape stretching die. The sheet metal is shaped over the MPSD, which includes a punch element. A study was conducted to compare the results with those obtained from conventional stretch forming by S. Wang et al. in 2012. The research examined how variations in the thickness of the elastic cushion and the size of the punch element affected stress concentration and local strain. Based on the results, it has been noted that using a smaller punch element in conjunction with an elastic cushion can effectively affect stress concentration and minimize local deformation. This facilitates the stress distribution on the sheet and aids in the prevention of dimple defects [73].
In a study conducted by E. Odenberger et al. in 2013, the focus was on evaluating suitable constitutive models for the thermo-mechanical forming of the titanium alloy Ti-6Al-4V. Additionally, it introduces a new approach for fabricating curved sheet metal parts with Ti-6Al-4V. The virtual tool’s design was analyzed with finite element (FE) analyses, which assess two different anisotropic yield criteria to forecast a range of factors, including global forming force, draw-in, springback, and strain localization. The significance of the yield surface’s shape is highlighted, and the accuracy of predicting shape deviation can be slightly improved by including the cooling procedure [74].
A study on the multi-point forming (MPF) process of polycarbonate (PC) sheets emphasizes the importance of the connection between the objective surface and punch element. A simple calculation method for determining the punch height is proposed. A series of numerical simulations were performed using dynamic explicit finite element analysis to investigate the deformation process of spherical and saddle-shaped components. This study explores the effects of various factors, such as temperature, pressure, punch matrix, and punch radius, on the overall quality of the forming process [64].
Multiple die stretch forming (MDSF), a versatile fabrication method, can be used to manufacture single or double-curved surfaces [18]. In 2014, J. Park et al. published a research paper titled “Study on multiple die stretch forming for curved the surface of sheet metal”. The paper presents a systematic numerical simulation that evaluates the behavior of elastic deformation and assesses the formability of an atypical double-curved surface formed by MDSF. The results suggest that MDSF proves to be a suitable process for creating curved surfaces of ships and architectural skin structures of buildings [75]. In 2016, a group of researchers led by D. Shim conducted a study on the tension force involved in the stretch-forming process of doubly curved aluminum alloy sheets. Aluminum alloys are being used in various industries, particularly in the automotive, shipbuilding, and aerospace sectors, due to their lightweight properties. However, the process of shaping aluminum sheets with double curvatures poses a significant challenge due to the springback effect. Hence, the stretch-forming process plays a crucial role in attaining accurate outcomes and reducing product flaws. This study investigates the deformation of the Al5083 aluminum alloy sheet and proposes an optimal tension force, considering the variations in the mechanical properties of the formed material. Through the use of finite element simulations and experiments, it has been shown that the tension force plays a crucial role in the creation of doubly curved aluminum surfaces. This process allows for minimal reduction in thickness while achieving exceptional accuracy [76].
In 2016, J. Fend et al. put forward a different approach that involved studying the stretching and deforming properties of Al–Li–S4–T8 Al–Li alloy sheets to analyze their critical orange peel state. Several specimens with varying notches underwent stretching experiments to analyze the forming limit diagram and establish the equation for the forming limit curve of the suggested alloy [77].
The Swift and Hill criteria, which are derived from the maximum force criteria, have been extensively used in the investigation of sheet formability. In their study, D. Morales-Palma et al. present stretch-bending conditions and explore the application of the maximum force principle. They present two different approaches that can be used to predict necking. One method involves adjusting the traditional maximum force criteria to account for stretch-bending processes, while the other method builds on prior studies that utilized critical distance concepts. A deformation model is proposed to analyze the stretch-bending process under plane-strain conditions. This model considers various parameters, including the reduction in thickness, the variation of variables throughout the thickness of the sheet, the stress caused by thickness, and the anisotropy of the material. [53].
In 2017, researchers M. Abosaf et al. shared their findings in a published research paper titled “Optimisation of multi-point forming process parameters”. The authors observed a rise in the demand for sheet metal forming with reconfigurable dies, which can be attributed to the fast-evolving part design, particularly in the automotive sector. Reconfigurable dies provide a more cost-effective manufacturing solution compared to solid dies, allowing for easy adjustments to produce a variety of parts. Prior studies have predominantly concentrated on avoiding defects, overlooking the influence of the forming process on the quality attributes of manufactured components. The study focused on investigating the impact of different factors, including the thickness of the elastic cushion, coefficient of friction, size of the pin, and radius of curvature, on the overall quality of parts produced using a flexible multi-point stamping die. A study utilized finite element modeling to simulate the multi-point forming of hemispherical parts. The effects of process parameters on wrinkling, deviation from the target shape, and thickness variation were analyzed using the response surface method [63].
More and more, numerical simulation was becoming the go-to method for investigating intricate engineering issues. When it comes to simulating sheet metal forming processes, the primary techniques used are the finite difference method (FDM) and finite element method (FEM). The paper “Numerical simulation of sheet metal forming: a review” by M. Ablat and A. Qattawi presents developments in simulation techniques, weighing the advantages and disadvantages of numerical methods, emphasizing advancements in solution strategies and formulation, as well as the selection of elements, historical evolution of anisotropy and yield criteria, material springback and simulation techniques for cutting-edge sheet metal forming methods such as laser forming and incremental sheet forming (ISF) [78].
2. Recent Developments—Using Autonomous Processes
In the current era of the Internet of Things, cyberspace, mobile devices, businesses, social media platforms, and healthcare systems, there is a vast amount of online data. To effectively analyze and use these data, it is crucial to understand machine learning (ML). ML enables intelligent analysis and automation of applications using these data. There exist various types of machine learning problems, each needing specific machine learning algorithms for their solution [79]. Big manufacturers or startup companies understand that metal forming is a complex process that has to be augmented or fully controlled by complex algorithms. This level of process automation has been moving in this direction for several years, with companies such as Machina Labs (vertical collaborative robo-forming), Rios Intelligent Machines and Aqrose Technology (visual intelligence collaborative robots), BMW (humanoid robots for their production lines), or Figure AI (integrating humanoid robots into labor force) integrating high-end software solutions into industrial or humanoid robots.
Advancements in the control of sheet metal forming processes through computer-aided techniques have revolutionized the manufacturing industry.
By the year 2020, the algorithms were reaching higher and higher levels of complexity. Extensive research has been conducted, as highlighted in a review paper titled “Brain-Computer Interface-Based Humanoid Control: A Review” by V. Chamola et al. The application of brain–computer interface (BCI) technology is being researched for enabling communication and control of external devices for individuals with severe motor impairments. Traditional BCI systems have typically used brain signals captured through electroencephalography (EEG) and translation algorithms based on rules. Nevertheless, the accuracy of these systems has been significantly improved with the recent integration of machine learning-based translation algorithms and multi-sensor data fusion. This is achieved by including telepresence, object grasping, and navigation, with the help of multi-sensor fusion and machine learning techniques to control humanoid robots, as indicated in Figure 2 [80].
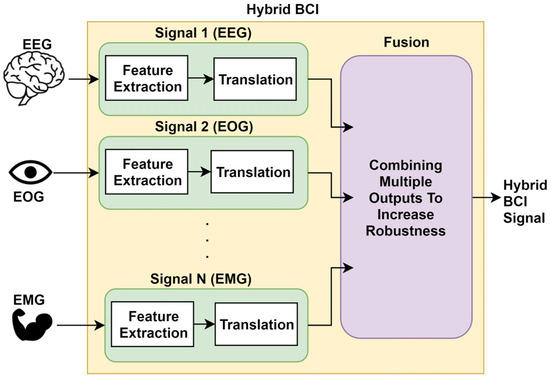
Figure 2. Block diagram of BCI [80].
In 2020, Y. Boon et al. proposed using machine learning for several aspects of structural component design. The research was centered around the development of materials with specific microstructures. Furthermore, machine learning models were being utilized to analyze stress patterns, while efforts were being undertaken to enhance the performance of fiber-reinforced polymer composites. A framework for automating the design and optimization process of these components is proposed, with a strong emphasis on achieving optimal performance [81]. Mineral resource estimation includes assessing the characteristics of a mineral deposit, such as its geological attributes, to determine its quality and quantity. Conventional estimation methods, such as geometric and geostatistical techniques, continue to be widely used. Nevertheless, the latest developments in computer algorithms have empowered researchers to explore the potential of employing machine learning techniques for mineral resource estimation [82]. In the same year, A. Raza published a paper on fault diagnosis techniques in power transmission systems. The focus of the study was on fault detection, classification, and localization, with an emphasis on exploring effective methods. The article explores various techniques such as feature extraction, dimensionality reduction, fault classification, and localization. These methods heavily rely on artificial intelligence (AI) and signal processing. The study assesses the advantages and disadvantages of different AI and machine learning algorithms, conducting a comparison of various methods based on their features, inputs, complexity, system used, and results [83].
Research has predominantly centered around the development of novel algorithms, with less emphasis on integrating and building upon established knowledge. The absence of strictness and structure in the classification, design, and development of combinatorial optimization problems and metaheuristics presents a significant obstacle to the progress of this field. In the article “Combinatorial Optimization Problems and Metaheuristics: Review, Challenges, Design, and Development”, F. Perez et al. discuss the key concepts and challenges in this field. They also propose a formal framework for classifying, designing, and implementing combinatorial optimization problems [84].
In 2021, C. Shen and T. Hsu proposed a cutting-edge method using a deep learning framework to enhance driving safety. Their research focuses on accurately predicting and determining the path of a vehicle. The study is organized into three main sections: lane line identification, car object detection, and car trajectory prediction. Utilizing authentic images and videos, researchers were able to accurately detect cars with a precision of 0.91, effectively simulating real-world situations, and a loss of 0.00024, costing 12 ms of computational time [85]. In 2023, S. Budzan et al. conducted research on the utilization of 2D hand gesture recognition (HGR) to control the automated guided vehicle (AGV). It indicates that RGB images might produce better results than grayscale images in real-world situations. Utilizing advanced 3D imaging techniques and incorporating a depth map can significantly improve the outcomes [86]. Computer vision algorithms were also used to examine critical infrastructure, like roads, bridges, and buildings, for flaws, which is a labor-intensive process that necessitates routine visual inspections after natural calamities. Identifying cracks poses a significant challenge, requiring substantial resources and frequently leading to cracks going unnoticed. To guarantee the efficiency and dependability of infrastructure, the implementation of automated defect detection is essential. An effective approach involves utilizing image processing techniques to analyze images of infrastructure components, as proposed in a recent publication by H. Munawar et al. in 2021. More and more, machine learning techniques are being used to improve the accuracy and reliability of fracture detection [87]. Returning to the manufacturing area, where inspection operations are essential, and considering the progress of this industry, it becomes crucial to improve the quality inspection of industrial products. In their research, Y. Chen et al. present a comprehensive review of the current studies focused on machine learning methods used in identifying surface defects. This is a crucial aspect of ensuring high-quality inspection in the manufacturing of industrial products. The research looks into the application of traditional machine vision techniques for identifying surface defects in industrial products. The emphasis is placed on analyzing texture, color, and shape characteristics [88]. Identifying imperfections on steel surfaces is a critical component of detecting flaws in industrial products. There has been a surge of interest in this field before this time. Y. Matsuzaka and R. Yashiro delve into the crucial hardware components utilized in systems designed to identify imperfections on steel surfaces. The publication “AI-Based Computer Vision Techniques and Expert Systems”, released in 2023, thoroughly examines the algorithms employed in identifying imperfections on steel surfaces. These algorithms encompass a range of machine learning techniques, including traditional approaches that utilize texture and shape features, as well as advanced deep learning algorithms that can be supervised, unsupervised, or weakly supervised [89].
In the age of digital transformation, the integration of interconnected computers and software systems has become indispensable in people’s daily lives. There has been a growing interest in studying software quality, and numerous endeavors have been made to consolidate the knowledge acquired in this domain. Publications on software quality were gathered from the Scopus bibliographic database and examined using synthetic content analysis. A comprehensive analysis from 2022 by P. Kokol indicates a significant surge in research publications focused on software quality. Notably, the United States emerges as the leading contributor in this domain. Key areas of focus revolve around optimizing software engineering practices to enhance the overall quality of software, implementing advanced techniques for software testing, and harnessing the power of machine learning and data mining to predict defects and faults more effectively [90].
As indicated so far, machine learning (ML) is a branch of artificial intelligence (AI) that specializes in developing algorithms that can learn from data and apply their knowledge to new situations through statistical techniques. Nevertheless, ML algorithms do not adhere to the methodology typically associated with scientific disciplines. Although they excel at making precise predictions, they fall short of providing a causal explanation for these predictions. As an example, an artificial neural network (ANN) that has undergone training using a vast amount of consumer financial data can predict creditworthiness. Nevertheless, understanding the intricate and complex structure of the model poses a challenge when trying to determine the specific factors or combinations of factors it utilizes to reach its decisions. The lack of transparency in this situation can be problematic, especially when a credit application is rejected, and the applicant wants to understand the specific reasons for the denial. Recent developments in machine learning, including reinforcement learning and imitation learning, suggest a growing resemblance to the cognitive skills used in human learning. [91]. The potential of artificial intelligence (AI) and machine learning (ML) for solving practical problems is immense. So far, their adoption in various sectors and communities remains limited. The complexities of integrating AI applications must be tackled from various angles, encompassing both technical and societal considerations [92].
In a recent publication by P. Gupta et al. in 2021, a new approach to vertical wall manufacturing was introduced. The design involves the use of a die that closely resembles the concept of two-point incremental forming but without the need for actuators. The authors present their results and discuss the potential applications of this technique. The geometry is created through a series of six passes, with the toolpath being generated using state-of-the-art computer-aided manufacturing software. Applying this method in manufacturing significantly decreases errors in critical areas and improves the evenness of thickness distribution [60].
In their publication, J. Bressan et al. examine the predictions of formability for Ti6Al4V titanium alloy sheets under deformation conditions at both room temperature and 600 °C. The predictions were made utilizing D-Bressan’s shear stress rupture criterion and the critical strain gradient macroscopic modeling. The application of a specific criterion for shear stress rupture showed a strong correlation with the experimental limit strain results. This suggests that the behavior of the specimens, deformed at different temperatures, was accurately reproduced [93].
Stretch bending is a common method used to shape long products by curving their axis while maintaining a consistent cross-section. Optimizing the forming path is a highly effective and straightforward method to prevent common issues in stretch bending, including axial springback and cross-sectional distortion. This paper presents a representation of the forming path using a function that considers the stretch length and bending angle. To further enhance the understanding of the impact of the forming path on forming quality, two additional variables, total stretch length and distribution ratio, are introduced. A machine learning model has been developed using data obtained from finite element simulation to efficiently predict the quality of rail formation with a hat-shaped section. An optimization strategy based on the NSGA-II algorithm is employed to efficiently optimize the formation path. Based on the findings, it is clear that the overall stretch plays a crucial role in determining the quality of stretch bending. However, the distribution of stretch in various forming processes, such as pre-stretch, bend stretch, and post-stretch, has a relatively minor impact on stretch bending quality, with only a few exceptions. As the overall stretch increases, the forming angle goes through a significant initial increase before reaching a stable state. However, the cross-sectional distortion continues to increase without stopping. Based on the analysis conducted, it has been determined that the optimal forming path indicates a balanced combination of post-stretch and bending stretch during the forming process [94].
The data analysis of the adaptive stretch forming process reveals the algorithm’s ability to identify the shift from elastic to plastic deformation. This finding has important implications for future development as it shows that the current form can be effectively used in the elastic domain. However, it may need an upgrade to accurately analyze real-time plastic deformation. Based on the statistical data, it is evident that optimal outcomes are achieved when the initial values for the R2 are at an average level, indicating the significance of process parameters. When these parameters vary, the radius diverges. Additionally, the outcome is influenced by how often the die speed is adjusted. Another crucial aspect is that the algorithm reaches the most accurate conclusion in the event of unforeseen changes [54].
Shape memory materials, including shape memory alloys (SMAs), have found innovative applications in various industries, spanning from sensors and actuators to robotics, aerospace, civil engineering, and medicine. Traditional methods, such as the finite element method, have been utilized to study the properties of shape memory alloys, their models, and their wide range of applications. However, these materials exhibit non-linear behavior, posing a challenge for the application of conventional methods and increasing the computational time needed to accurately model their diverse shapes and applications. A promising approach involves developing innovative methodological strategies that leverage the power of artificial intelligence (AI) to achieve optimal computational efficiency and accurate results. Artificial neural networks (ANNs), a subset of deep learning, have been employed to analyze shape memory alloys (SMAs). The authors of a recent publication highlight the importance of artificial intelligence in the modeling of shape memory alloys (SMAs). They explore the deep connection between artificial neural networks (ANNs) and SMAs in various fields such as medicine, robotics, engineering, and automation [95].
Identifying imperfections on steel surfaces is a vital component of detecting flaws in industrial products. In their study published in 2023, X. Wen et al. investigated crucial hardware components of systems utilized in the detection of defects on steel surfaces. An extensive analysis of algorithms employed in the identification of imperfections on steel surfaces. These algorithms encompass a range of machine learning approaches, including traditional methods that utilize texture and shape features, as well as advanced deep learning algorithms that can be supervised, unsupervised, or weakly supervised [96].
Navigating through unstructured environments poses a significant challenge, requiring intelligent agents to detect and react to potential obstacles. The challenges can range from vehicles, pedestrians, or stationary objects in controlled settings to unpredictable stationary and moving obstacles in natural environments like forests. In 2024, C. Ginerica et al. put forth a new approach to path determination and navigation for quadruped robots on forest roads. Their research focuses on utilizing a recurrent neural network, which is based on an RGB-D sensor, to analyze vision dynamics. This approach generates sequences of previous depth sensor observations and predicts future observations within a specified period. The results indicate outstanding performance in designing collision-free trajectories for the intelligent agent [97].
The growing need for accurate analysis and control in manufacturing processes has led to a greater emphasis on utilizing industrial data rather than relying solely on simplified physical models and human expertise. The rapid increase in data volume has significantly transformed the methods of data collection and analysis in the age of data-driven production. The technological advancements in data gathering and analysis in the field of in-process manufacturing are reviewed. Given the challenges and lack of certainty associated with indirect measurement, it is worth noting that there is a notable and promising trend towards the development of advanced sensor technology that enables direct measurement. This technology has the potential to greatly enhance data collection methods. When analyzing data using physical models, it is important to acknowledge that simplifications are necessary and that the answers obtained may not always be well-defined. This is because these models have limitations when it comes to describing complex industrial processes. When provided with a wealth of data, machine learning, especially deep learning methods, holds great potential for improving decision-making and automating processes. In contrast, recent data-driven manufacturing techniques have achieved comparable or even superior results by using less data. These patterns can be demonstrated by analyzing certain typical manufacturing process applications [98].
Ferritic stainless steels are commonly used as replacements for austenitic steels because they are more cost-effective and have improved deep drawing capabilities. However, instances of failure, like shear fracture, have been observed in components with small radii during the drawing process when both bending and stretching occur. Conventional approaches, including failure criterion analysis, finite element method, and forming limit diagram, have proven insufficient in predicting this specific type of fracture, which hinders the progress of innovative processes and products. In a recent study conducted by V. Luiz et al., the researchers looked into the effects of tool radius, direction, and test speed on the structural integrity of an AISI 430 stainless steel sheet. The study aimed to understand the sheet’s resistance to bending and stretching, specifically focusing on its ability to withstand these forces without fracturing. A test was conducted using specialized equipment to subject the sheet to bending while under tension, allowing for analysis of the draw-bend fracture (DBF). The experimental outcomes were directly influenced by the relationship between the tool radius and the sheet thickness of the process parameters [99].
References
- IBM. What Is Supervised Learning? Available online: https://www.ibm.com/topics/supervised-learning (accessed on 15 January 2024).
- Maulud, D.; Abdulazeez, A.M. A Review on Linear Regression Comprehensive in Machine Learning. J. Appl. Sci. Technol. Trends 2020, 1, 140–147.
- Maalouf, M. Logistic Regression in Data Analysis: An Overview. Int. J. Data Anal. Tech. Strateg. 2011, 3, 281–299.
- Blockeel, H.; Devos, L.; Frénay, B.; Nanfack, G.; Nijssen, S. Decision Trees: From Efficient Prediction to Responsible AI. Front. Artif. Intell. 2023, 6, 1124553.
- Smith, R.E.; Jiang, M.K.; Bacardit, J.; Stout, M.; Krasnogor, N.; Hirst, J.D. A Learning Classifier System with Mutual-Information-Based Fitness. Evol. Intell. 2010, 3, 31–50.
- Cervantes, J.; Garcia-Lamont, F.; Rodríguez-Mazahua, L.; Lopez, A. A Comprehensive Survey on Support Vector Machine Classification: Applications, Challenges and Trends. Neurocomputing 2020, 408, 189–215.
- Zhang, Z. Introduction to Machine Learning: K-Nearest Neighbors. Ann. Transl. Med. 2016, 4, 218.
- Zhang, Y.; Liu, J.; Shen, W. A Review of Ensemble Learning Algorithms Used in Remote Sensing Applications. Appl. Sci. 2022, 12, 8654.
- Bergmann, D. What Is Semi-Supervised Learning? Available online: https://www.ibm.com/topics/semi-supervised-learning (accessed on 15 January 2024).
- Cascante-Bonilla, P.; Tan, F.; Qi, Y.; Ordonez, V. Curriculum Labeling: Revisiting Pseudo-Labeling for Semi-Supervised Learning. Proc. AAAI Conf. Artif. Intell. 2020, 35, 6912–6920.
- Zhang, X.; Zou, Y.; Li, S. Semi-Supervised Generative Adversarial Network with Guaranteed Safeness for Industrial Quality Prediction. Comput. Chem. Eng. 2021, 153, 107418.
- IBM. What Is Unsupervised Learning? Available online: https://www.ibm.com/topics/unsupervised-learning (accessed on 15 January 2024).
- Ikotun, A.M.; Ezugwu, A.E.; Abualigah, L.; Abuhaija, B.; Heming, J. K-Means Clustering Algorithms: A Comprehensive Review, Variants Analysis, and Advances in the Era of Big Data. Inf. Sci. 2023, 622, 178–210.
- Märzinger, T.; Kotík, J.; Pfeifer, C. Application of Hierarchical Agglomerative Clustering (HAC) for Systemic Classification of Pop-Up Housing (PUH) Environments. Appl. Sci. 2021, 11, 11122.
- Chen, Y. DBSCAN Is Semi-Spectral Clustering. In Proceedings of the 2020 6th International Conference on Big Data and Information Analytics (BigDIA), Shenzhen, China, 4–6 December 2020; pp. 257–264.
- Greenacre, M.; Groenen, P.J.F.; Hastie, T.; D’Enza, A.I.; Markos, A.; Tuzhilina, E. Principal Component Analysis. Nat. Rev. Methods Primers 2022, 2, 100.
- Mummert, T.; Subramanian, D.; Vu, L.; Pham, N. What Is Reinforcement Learning? Available online: https://developer.ibm.com/learningpaths/get-started-automated-ai-for-decision-making-api/what-is-automated-ai-for-decision-making (accessed on 15 January 2024).
- Watkins, C.J.C.H.; Dayan, P. Q-Learning. Mach. Learn. 1992, 8, 279–292.
- Wang, Y.-H.; Li, T.-H.S.; Lin, C.-J. Backward Q-Learning: The Combination of Sarsa Algorithm and Q-Learning. Eng. Appl. Artif. Intell. 2013, 26, 2184–2193.
- Zhang, Z.; Zou, Y.; Lai, J.; Xu, Q. M2DQN: A Robust Method for Accelerating Deep Q-Learning Network. In Proceedings of the 2023 15th International Conference on Machine Learning and Computing, Zhuhai, China, 17–20 February 2023.
- Dong, R.; Du, J.; Liu, Y.; Heidari, A.A.; Chen, H. An Enhanced Deep Deterministic Policy Gradient Algorithm for Intelligent Control of Robotic Arms. Front. Neuroinform. 2023, 17, 1096053.
- Jeong, G.-M.; Ahn, H.-S.; Choi, S.-I.; Kwak, N.; Moon, C. Pattern Recognition Using Feature Feedback: Application to Face Recognition. Int. J. Control Autom. Syst. 2010, 8, 141–148.
- Dai, C.; Long, Z.; Xie, Y.; Xue, S. Research on the Filtering Algorithm in Speed and Position Detection of Maglev Trains. Sensors 2011, 11, 7204–7218.
- Hou, H.; Jin, L.; Niu, Q.; Sun, Y.; Lu, M. Driver Intention Recognition Method Using Continuous Hidden Markov Model. Int. J. Comput. Intell. Syst. 2011, 4, 386–393.
- Nebot, À.; Mugica, F.; Castro, F.; Acosta, J. Genetic Learning of Fuzzy Parameters in Predictive and Decision Support Modelling. Int. J. Comput. Intell. Syst. 2012, 5, 387–402.
- Bagchi, S. Distributed Computation Using Evolutionary Consciousness: An Approach. Int. J. Comput. Intell. Syst. 2015, 8, 928–942.
- Pérez-Ortiz, M.; Jiménez-Fernández, S.; Gutiérrez, P.A.; Alexandre, E.; Hervás-Martínez, C.; Salcedo-Sanz, S. A Review of Classification Problems and Algorithms in Renewable Energy Applications. Energies 2016, 9, 607.
- Bouchemal, B.; Zaatri, A. Image-Based Control for Cable-Based Robots. Int. J. Control Autom. Syst. 2014, 12, 118–125.
- Liu, Z.; Li, X.; Li, F.; Wei, X.; Zhang, G. Fast and Flexible Movable Vision Measurement for the Surface of a Large-Sized Object. Sensors 2015, 15, 4643–4657.
- Lepot, M.; Aubin, J.-B.; Clemens, F.H.L.R. Interpolation in Time Series: An Introductive Overview of Existing Methods, Their Performance Criteria and Uncertainty Assessment. Water 2017, 9, 796.
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine Learning Methods for Pipeline Surveillance Systems Based on Distributed Acoustic Sensing: A Review. Appl. Sci. 2017, 7, 841.
- Chang, C.-W.; Lee, H.-W.; Liu, C.-H. A Review of Artificial Intelligence Algorithms Used for Smart Machine Tools. Inventions 2018, 3, 41.
- Liu, S.; Zhang, X.; Zhang, S.; Wang, H.; Zhang, W. Neural Machine Reading Comprehension: Methods and Trends. Appl. Sci. 2019, 9, 3698.
- Liu, H.; Lang, B. Machine Learning and Deep Learning Methods for Intrusion Detection Systems: A Survey. Appl. Sci. 2019, 9, 4396.
- Carvalho, D.V.; Pereira, E.M.; Cardoso, J.S. Machine Learning Interpretability: A Survey on Methods and Metrics. Electronics 2019, 8, 832.
- Hamouche, E.; Loukaides, E.G. Classification and Selection of Sheet Forming Processes with Machine Learning. Int. J. Comput. Integr. Manuf. 2018, 31, 921–932.
- Salem, F.A.; Mahfouz, A. Mechatronics Subsystems’ Classification, Role, Selection Criteria and Synergistic Integration in Overall System Design. Am. J. Educ. Sci. 2016, 2, 16–28.
- Salem, F.A. The Role of Control System/Algorithm Subsystems in Mechatronics Systems Design. J. Multidiscip. Eng. Sci. Technol. 2015, 2, 2717–2732.
- Scalera, L.; Palomba, I.; Wehrle, E.; Gasparetto, A.; Vidoni, R. Natural Motion for Energy Saving in Robotic and Mechatronic Systems. Appl. Sci. 2019, 9, 3516.
- Chen, S.; Li, S.; Liu, B.; Lou, Y.; Liang, Y. Self-Learning Variable Structure Control for a Class of Sensor-Actuator Systems. Sensors 2012, 12, 6117–6128.
- Fontana, M.; Salsedo, F.; Bergamasco, M. Novel Magnetic Sensing Approach with Improved Linearity. Sensors 2013, 13, 7618–7632.
- Liu, Y.; Han, H.; Liu, T.; Yi, J.; Li, Q.; Inoue, Y. A Novel Tactile Sensor with Electromagnetic Induction and Its Application on Stick-Slip Interaction Detection. Sensors 2016, 16, 430.
- Chen, J.; Abbod, M.; Shieh, J.-S. Integrations between Autonomous Systems and Modern Computing Techniques: A Mini Review. Sensors 2019, 19, 3897.
- Ljung, L. Some Classical and Some New Ideas for Identification of Linear Systems. J. Control Autom. Electr. Syst. 2013, 24, 3–10.
- Kluyskens, V.; Van Verdeghem, J.; Dehez, B. Experimental Investigations on Self-Bearing Motors with Combined Torque and Electrodynamic Bearing Windings. Actuators 2019, 8, 48.
- Filice, L.; Fratini, L.; Micari, F. Analysis of Material Formability in Incremental Forming. CIRP Ann. 2002, 51, 199–202.
- Harfoush, A.; Haapala, K.R.; Tabei, A. Application of Artificial Intelligence in Incremental Sheet Metal Forming: A Review. Procedia Manuf. 2021, 53, 606–617.
- Araghi, B.T.; Manco, G.L.; Bambach, M.; Hirt, G. Investigation into a New Hybrid Forming Process: Incremental Sheet Forming Combined with Stretch Forming. CIRP Ann. 2009, 58, 225–228.
- Groche, P.; Bäcker, F. Springback in Stringer Sheet Stretch Forming. CIRP Ann. 2013, 62, 275–278.
- Abu Samk, K.; Yu, B.; Hibbard, G.D. Architectural Design in Stretch-Formed Microtruss Composites. Compos. Part A Appl. Sci. Manuf. 2012, 43, 955–961.
- El-Domiaty, A.A.; Shabara, M.A.N.; Al-Ansary, M.D. Determination of Stretch-Bendability of Sheet Metals. Int. J. Adv. Manuf. Technol. 1996, 12, 207–220.
- Wang, Y.; Liu, D.-Z.; Li, R. Numerical Investigation for the Flexible Stretch-Stamp Forming Process of Sheet Metal. Adv. Mech. Eng. 2019, 11, 1687814018819287.
- Morales-Palma, D.; Martínez-Donaire, A.J.; Vallellano, C. On the Use of Maximum Force Criteria to Predict Localised Necking in Metal Sheets under Stretch-Bending. Metals 2017, 7, 469.
- Grigoras, C.C.; Zichil, V.; Chirita, B.; Ciubotariu, V.A. Adaptive Stretch-Forming Process: A Computer Vision and Statistical Analysis Approach. Machines 2021, 9, 357.
- Gotoh, M.; Kim, Y.; Yamashita, M. A Fundamental Study of Can Forming by the Stretch-Drawing Process. J. Mater. Process Technol. 2003, 138, 545–550.
- Bayoumi, A.E.; Joshi, R. On the Formability/Instability of Stretch-Forming Sheet Metals. Appl. Mech. Rev. 1992, 45, S154–S164.
- Vlahovic, D.; Liewald, M. Benchmarking Methods for Short Cycle Stretch-Forming. Int. J. Mater. Form. 2008, 1, 193–196.
- Schilp, H.; Suh, J.; Hoffmann, H. Reduction of Springback Using Simultaneous Stretch-Bending Processes. Int. J. Mater. Form. 2012, 5, 175–180.
- Kim, T.J.; Yang, D.Y. Improvement of Formability for the Incremental Sheet Metal Forming Process. Int. J. Mech. Sci. 2000, 42, 1271–1286.
- Gupta, P.; Szekeres, A.; Jeswiet, J. Manufacture of an Aerospace Component with Hybrid Incremental Forming Methodology. Int. J. Mater. Form. 2021, 14, 293–308.
- Akrichi, S.; Abbassi, A.; Abid, S.; Ben Yahia, N. Roundness and Positioning Deviation Prediction in Single Point Incremental Forming Using Deep Learning Approaches. Adv. Mech. Eng. 2019, 11, 1687814019864465.
- Cui, X.; Mo, J.; Li, J.; Xiao, X.; Zhou, B.; Fang, J. Large-Scale Sheet Deformation Process by Electromagnetic Incremental Forming Combined with Stretch Forming. J. Mater. Process Technol. 2016, 237, 139–154.
- Abosaf, M.; Essa, K.; Alghawail, A.; Tolipov, A.; Su, S.; Pham, D. Optimisation of Multi-Point Forming Process Parameters. Int. J. Adv. Manuf. Technol. 2017, 92, 1849–1859.
- Peng, H.; Li, M.; Liu, C.; Cao, J. Study of Multi-Point Forming for Polycarbonate Sheet. Int. J. Adv. Manuf. Technol. 2013, 67, 2811–2817.
- Cherukupally, S.; Konka, P.; Venkata Reddy, N. Enhancement of Accuracy in Multi-Point Stretch Forming: Cushion Stretching. Manuf. Lett. 2022, 33, 205–213.
- Cai, Z.-Y.; Wang, S.-H.; Xu, X.-D.; Li, M.-Z. Numerical Simulation for the Multi-Point Stretch Forming Process of Sheet Metal. J. Mater. Process Technol. 2009, 209, 396–407.
- Hardt, D.E.; Norfleet, W.A.; Valentin, V.M.; Parris, A. In Process Control of Strain in a Stretch Forming Process. J. Eng. Mater. Technol. 2000, 123, 496–503.
- Jones, J.; Mears, L. A Process Comparison of Simple Stretch Forming Using Both Conventional and Electrically-Assisted Forming Techniques. In Proceedings of the International Manufacturing Science and Engineering Conference, Blacksburg, VA, USA, 27 June–1 July 2010.
- Wang, N.-M.; Wenner, M.L. Elastic-Viscoplastic Analyses of Simple Stretch Forming Problems. In Mechanics of Sheet Metal Forming: Material Behavior and Deformation Analysis; Koistinen, D.P., Wang, N.-M., Eds.; Springer: Boston, MA, USA, 1978; pp. 367–402. ISBN 978-1-4613-2880-3.
- Hirt, G.; Bambach, M.; Bleck, W.; Prahl, U.; Stollenwerk, J. The Development of Incremental Sheet Forming from Flexible Forming to Fully Integrated Production of Sheet Metal Parts. In Advances in Production Technology; Brecher, C., Ed.; Springer International Publishing: Cham, Switzerland, 2015; pp. 117–129.
- Paunoiu, V.; Cekan, P.; Gavan, E.; Nicoara, D. Numerical Simulations in Reconfigurable Multipoint Forming. Int. J. Mater. Form. 2008, 1, 181–184.
- Kurukuri, S.; Miroux, A.; Wisselink, H.; van den Boogaard, T. Simulation of Stretch Forming with Intermediate Heat Treatments of Aircraft Skins. Int. J. Mater. Form. 2011, 4, 129–140.
- Wang, S.; Cai, Z.; Li, M.; Lan, Y. Numerical Simulation on the Local Stress and Local Deformation in Multi-Point Stretch Forming Process. Int. J. Adv. Manuf. Technol. 2012, 60, 901–911.
- Odenberger, E.-L.; Schill, M.; Oldenburg, M. Thermo-Mechanical Sheet Metal Forming of Aero Engine Components in Ti-6Al-4V—PART 2: Constitutive Modelling and Validation. Int. J. Mater. Form. 2013, 6, 403–416.
- Park, J.-W.; Kim, Y.-B.; Kim, J.; Kang, B.-S. Study on Multiple Die Stretch Forming for Curved Surface of Sheet Metal. Int. J. Precis. Eng. Manuf. 2014, 15, 2429–2436.
- Shim, D.-S.; Baek, G.-Y.; Shin, G.-Y.; Yoon, H.-S.; Lee, K.-Y.; Kim, K.-H. Investigation of Tension Force in Stretch Forming of Doubly Curved Aluminum Alloy (Al5083) Sheet. Int. J. Precis. Eng. Manuf. 2016, 17, 433–444.
- Feng, J.-W.; Zhan, L.-H.; Yang, Y.-G. The Establishment of Surface Roughness as Failure Criterion of Al–Li Alloy Stretch-Forming Process. Metals 2016, 6, 13.
- Ablat, M.A.; Qattawi, A. Numerical Simulation of Sheet Metal Forming: A Review. Int. J. Adv. Manuf. Technol. 2017, 89, 1235–1250.
- Tufail, S.; Riggs, H.; Tariq, M.; Sarwat, A.I. Advancements and Challenges in Machine Learning: A Comprehensive Review of Models, Libraries, Applications, and Algorithms. Electronics 2023, 12, 1789.
- Chamola, V.; Vineet, A.; Nayyar, A.; Hossain, E. Brain-Computer Interface-Based Humanoid Control: A Review. Sensors 2020, 20, 3620.
- Di Boon, Y.; Joshi, S.C.; Bhudolia, S.K.; Gohel, G. Recent Advances on the Design Automation for Performance-Optimized Fiber Reinforced Polymer Composite Components. J. Compos. Sci. 2020, 4, 61.
- Dumakor-Dupey, N.K.; Arya, S. Machine Learning—A Review of Applications in Mineral Resource Estimation. Energies 2021, 14, 4079.
- Raza, A.; Benrabah, A.; Alquthami, T.; Akmal, M. A Review of Fault Diagnosing Methods in Power Transmission Systems. Appl. Sci. 2020, 10, 1312.
- Peres, F.; Castelli, M. Combinatorial Optimization Problems and Metaheuristics: Review, Challenges, Design, and Development. Appl. Sci. 2021, 11, 6449.
- Shen, C.-H.; Hsu, T.-J. Research on Vehicle Trajectory Prediction and Warning Based on Mixed Neural Networks. Appl. Sci. 2021, 11, 7.
- Budzan, S.; Wyżgolik, R.; Kciuk, M.; Kulik, K.; Masłowski, R.; Ptasiński, W.; Szkurłat, O.; Szwedka, M.; Woźniak, Ł. Using Gesture Recognition for AGV Control: Preliminary Research. Sensors 2023, 23, 3109.
- Munawar, H.S.; Hammad, A.W.A.; Haddad, A.; Soares, C.A.P.; Waller, S.T. Image-Based Crack Detection Methods: A Review. Infrastructures 2021, 6, 115.
- Chen, Y.; Ding, Y.; Zhao, F.; Zhang, E.; Wu, Z.; Shao, L. Surface Defect Detection Methods for Industrial Products: A Review. Appl. Sci. 2021, 11, 7657.
- Matsuzaka, Y.; Yashiro, R. AI-Based Computer Vision Techniques and Expert Systems. AI 2023, 4, 289–302.
- Kokol, P. Software Quality: How Much Does It Matter? Electronics 2022, 11, 2485.
- Barbierato, E.; Gatti, A. The Challenges of Machine Learning: A Critical Review. Electronics 2024, 13, 416.
- Mukhamediev, R.I.; Popova, Y.; Kuchin, Y.; Zaitseva, E.; Kalimoldayev, A.; Symagulov, A.; Levashenko, V.; Abdoldina, F.; Gopejenko, V.; Yakunin, K.; et al. Review of Artificial Intelligence and Machine Learning Technologies: Classification, Restrictions, Opportunities and Challenges. Mathematics 2022, 10, 2552.
- Bressan, J.D.; Wang, Q.; Simonetto, E.; Ghiotti, A.; Bruschi, S. Formability Prediction of Ti6Al4V Titanium Alloy Sheet Deformed at Room Temperature and 600 °C. Int. J. Mater. Form. 2021, 14, 391–405.
- Lu, K.; Zou, T.; Luo, J.; Li, D.; Peng, Y. Stretch Bending Process Design by Machine Learning. Int. J. Adv. Manuf. Technol. 2022, 120, 781–799.
- Hmede, R.; Chapelle, F.; Lapusta, Y. Review of Neural Network Modeling of Shape Memory Alloys. Sensors 2022, 22, 5610.
- Wen, X.; Shan, J.; He, Y.; Song, K. Steel Surface Defect Recognition: A Survey. Coatings 2023, 13, 17.
- Ginerica, C.; Zaha, M.; Floroian, L.; Cojocaru, D.; Grigorescu, S. A Vision Dynamics Learning Approach to Robotic Navigation in Unstructured Environments. Robotics 2024, 13, 15.
- Xu, K.; Li, Y.; Liu, C.; Liu, X.; Hao, X.; Gao, J.; Maropoulos, P.G. Advanced Data Collection and Analysis in Data-Driven Manufacturing Process. Chin. J. Mech. Eng. 2020, 33, 43.
- Luiz, V.D.; de Matos Rodrigues, P.C. Failure Analysis of AISI 430 Stainless Steel Sheet under Stretching and Bending Conditions. Int. J. Adv. Manuf. Technol. 2022, 121, 2759–2772.
More
Information
Subjects:
Engineering, Manufacturing
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
926
Revisions:
2 times
(View History)
Update Date:
18 Mar 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No