Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Jose Carlos Moreno | -- | 3445 | 2024-03-11 08:48:19 | | | |
| 2 | Mona Zou | Meta information modification | 3445 | 2024-03-12 09:28:27 | | | | |
| 3 | Jose Carlos Moreno | Meta information modification | 3445 | 2024-03-12 09:48:13 | | | | |
| 4 | Mona Zou | -3 word(s) | 3442 | 2024-03-18 09:53:40 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Gómez-Espinosa, A.; Moreno, J.C.; Pérez-De La Cruz, S. Assisted Robots in Therapies for Children. Encyclopedia. Available online: https://encyclopedia.pub/entry/56089 (accessed on 24 June 2026).
Gómez-Espinosa A, Moreno JC, Pérez-De La Cruz S. Assisted Robots in Therapies for Children. Encyclopedia. Available at: https://encyclopedia.pub/entry/56089. Accessed June 24, 2026.
Gómez-Espinosa, Ana, José Carlos Moreno, Sagrario Pérez-De La Cruz. "Assisted Robots in Therapies for Children" Encyclopedia, https://encyclopedia.pub/entry/56089 (accessed June 24, 2026).
Gómez-Espinosa, A., Moreno, J.C., & Pérez-De La Cruz, S. (2024, March 11). Assisted Robots in Therapies for Children. In Encyclopedia. https://encyclopedia.pub/entry/56089
Gómez-Espinosa, Ana, et al. "Assisted Robots in Therapies for Children." Encyclopedia. Web. 11 March, 2024.
Copy Citation
Children with autism spectrum disorder (ASD) have deficits that affect their social relationships, communication, and flexibility in reasoning. There are different types of treatment (pharmacological, educational, psychological, and rehabilitative). Currently, one way to address this problem is by using robotic systems to address the abilities that are altered in these children.
child
early ages
autism
robot
social robots
ASD
1. Introduction
According to the World Health Organisation (WHO), it is estimated that 1 in 160 children has autism spectrum disorder (ASD) [1], but other studies suggest that this figure is even higher, reaching up to 1 per 100 children [2]. This estimate represents an average figure, as the observed prevalence varies considerably between studies [1]. Furthermore, Yang et al. [3] studied different databases to conduct a sociodemographic study and observed that there was a high age-standardised prevalence of ASD in the under-5 subgroup, in the subgroup of high sociodemographic index (SDI), and in the subgroup of high-income North America, respectively. Each subgroup is a smaller group represented by a common characteristic. In the case of the under-5 group, all patients are under five years of age; the North American group only comprises autistic people from that area; and the high-SDI group comprises autistic people who live in areas with a favourable socio-economic level and relatively good access to resources and services, that is, they live in families with relatively high levels of income and education. There are many possible explanations for this apparent increase in prevalence, including increased awareness, expanded diagnostic criteria, better diagnostic tools, and improved communication [1][2][3].
Autism is a complex developmental disorder that manifests itself in behaviours at the level of social and communicative interaction. Currently, through early care techniques and therapy during the first years of life, people with autism can achieve an autonomous life [4]. Therefore, ASD is a significant challenge in public health and developmental psychology, which affects an increasing number of children around the world. Children with ASD have a wide range of symptoms and needs, from difficulties in communication and social interaction to repetitive patterns of behaviour [4]. As the incidence of ASD continues to increase, it has become imperative to develop effective and accessible interventions that can improve the quality of life of these children and their families. In this context, robot-assisted therapies have emerged as a promising frontier in the care and treatment support of autistic children. The convergence of advanced technologies, such as robotics, artificial intelligence, and developmental psychology, has enabled the creation of specially designed robots to interact with children with ASD, which are robots that possess unique characteristics that make them ideal for these interventions [5]. They can offer repeatable and predictable interactions, which is especially beneficial for children who often find social situations unpredictable and overwhelming. In addition, these robots can adapt to the individual needs of the children, thus personalising therapy effectively and efficiently. They also eliminate the fear of social criticism often experienced by autistic children, creating a more comfortable and safe learning environment.
The research of various authors converges on specific thematic areas, reflecting the diversity and richness of investigations on the use of robots for children with ASD. In the field of robot-assisted intervention development, refs. [6][7][8][9][10][11] address the need for personalised interventions. From attention assessment to influencing gaze and joint attention, these authors seek to provide long-term therapies in home environments.
The application of machine learning and deep learning, subfields of artificial intelligence that focus on developing algorithms and models capable of learning patterns and performing specific tasks without the need to be explicitly programmed, in ASD classification and robotic therapies is a shared concern for researchers [12][13][14][15][16]. These works focus on the use of advanced algorithms and techniques to improve diagnostic accuracy and gain a better understanding of the patterns associated with the disorder. Another use, also related to this field, is Mihalache et al.’s [17] research on gaze perception in children with ASD that sheds light on how head and pupil rotations in 2D and 3D impact typical development and the effects of the disorder.
The implementation of robots in assisted therapy and rehabilitation for children with ASD is a prominent research area for authors such as [18][19][20][21][22][23][24][25][26][27][28]. These researchers explore everything from robot autonomy in non-invasive therapies to programming for specific skill improvements. Some authors better describe how therapy was focused or what its approach was, as in the case of [29] focussing on the development of a robotic music therapy platform, demonstrating the innovative application of non-conventional interventions, or [30][31] using social stories to promote social communication in children with ASD, using a humanoid robot to contribute to improving communication skills and social interaction.
Designing social robots and emotional communication are central points for authors, such as [30][32][33][34][35][36][37][38][39]. Their work focuses on developing robots with social and emotional abilities to achieve effective communication with autistic children. Redesigns or improvements of robots with other uses were also found, as in the case of [40] where an existing robot used as a commercial toy was modified for use as a therapy robot by adding the necessary software and hardware.
Other studies performed reviews, although they were not systematic reviews focusing solely on the use of robots at early ages for autistic children. Some of these articles were mainly aimed at showing the robots used in the articles [41] and others had samples with children of non-early ages, adolescents, or adults [21].
Finally, articles were found that did not perform robotic therapy but provided advanced insights into the technologies used (algorithms) in therapies for autistic children from different articles [42], the ethical and social aspects of robot-assisted therapy [43], and the socio-emotional outcomes of robot-assisted therapy [44], providing valuable information on the expectations and ethical acceptability of this new form of intervention.
2. Assistant Robots
Social assistant robots (SARs) are robotic devices designed to provide support, companionship, and assistance to people in various environments, especially those who may need special care or additional companionship. These robots are designed to perform a variety of tasks and functions that aim to improve the quality of life of people, especially those who face physical, emotional, or cognitive challenges [40]. Some of the typical functions of these robots are companionship to reduce loneliness and isolation, physical care, medication reminders and follow-up, therapy and entertainment, assistance in daily living or communication.
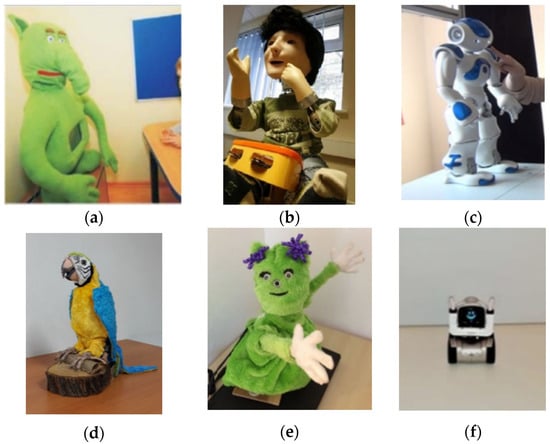
Of the functions of SARs, only the functions of the robot have been taken into account within therapies and training, which are often used in occupational therapy, play therapy, and entertainment activities. SARs can vary in size and complexity, from small, simple devices to more advanced robots with artificial intelligence capabilities and sensors that allow them to adapt to the needs and preferences of people they help. They aim to improve the quality of life of people, promote autonomy, and reduce the burden on caregivers and family members in long-term care situations. Figure 1 shows the different robots used in the selected papers. In the following, these robots are described in the context of the papers in which they are used.
2.1. Probo
The robot Probo (Figure 1a) has a fully actuated head capable of displaying facial expressions, which means that the robot can be used to express emotions with 20 degrees of freedom (DOF) in his face. In the study by Pop et al. [37] the robot is always controlled by an operator in a Wizard of Oz-like configuration, allowing an instant adaptation to unexpected behaviours–reactions of the participants. The Wizard of Oz experiment is a technique used in the field of human–computer interaction, in which subjects interact with a computer system they believe to be independent but which is actually controlled completely or partly by a human being [48]. This means that the robot does not act autonomously; that is, it does not make decisions on its own to direct the therapy, because it is controlled by a person with a PC or tablet. In Pop et al. [37], a lip synchronisation module allows the lips to move according to the voice, which consists of a pre-recorded neutral male voice. In addition, it has a soft and huggable touch, looks like a stuffed elephant, and is easy to wear.
2.2. KASPAR
KASPAR (Figure 1b), as described in [45], is a 60 cm tall minimally expressive humanoid robot, developed by researchers from the Adaptive Systems Research Group at the University of Hertfordshire, which sits in a seated position (like a child). It has been used to study various forms of human–robot interaction and communicates primarily with people through gestures, facial expressions, and speech (playing back pre-recorded messages). The robot has 14 degrees of freedom (8 DOF in the head–neck and 6 in the arms). The face is a silicone rubber mask supported by an aluminium frame. It has 2 DOF in the eyes, eyelids that can open and close, and a mouth capable of opening and smiling.
2.3. NAO
NAO (Figure 1c) is a humanoid robot developed by Aldebaran Robotics, France, 58 cm tall and 5 kg heavy with 25 degrees of freedom. NAO moves with agility, with an inertial navigation device to maintain stability, and can detect and avoid obstacles using two pairs of ultrasonic transmitters and receivers, which enable precise movement. NAO is balanced by four pressure sensors that control the corresponding centre of pressure on each foot. It has four speakers and a speech recognition and analysis system, which allow it to listen, speak, and perform spatial acoustic positioning, and two high-definition CMOS cameras that enable forward vision; such powerful hardware endows NAO with a high degree of artificial intelligence [49].
2.4. RoboParrot
RoboParrot (Figure 1d) is based on a Hasbro Toy Company toy, modified and with some hardware added to control the robot. According to the investigation by Dehkordi et al. [40], this hardware provides the communication between the robot and the computer. The RoboParrot robot is composed of various sensors, mechanisms, and software that allow it to interact with children and perform assessments for autism. It has sensors such as a microphone, infrared (IR) sensor, and Hall effect sensor in the beak, which allows the robot to detect the proximity of a hand on its head and beak. To perform movements, the robot has two main mechanical motors that control the movement of the body and head of the robot, where the body motor controls the movement of the wings, legs, and neck, and the head motor controls the movements of the eyes and the beak of the RoboParrot. All motors and sensors are monitored through this controller.
To interact with children, the robot is able to close and open its eyelids, beak, and wings. It can also move its body in three directions and its neck forward and backward or left and right, as well as using the speaker to make sounds and the microphone to pick up sounds. The study by Dehkordi et al. [40] developed a Graphical User Interface (GUI) module that provides tools for an operator to control the robot and a voice modulation module that filters and changes the operator’s voice so that it more closely resembles the voice of a parrot. The control system and user interface have been designed so that the operator can see an autistic child through the camera and interact with him/her verbally or by moving the robot.
2.5. Charlie
Charlie (Figure 1e) is the robot used by Boccanfuso et al. [38]. The robot’s hardware includes six servos, three pan–tilt platforms, an eight-channel servo controller, a consumer-grade webcam, and a lithium-polymer battery. The arms and head are mounted on a pan–tilt platform using large metal snap fasteners, with each platform controlled by two servos. The resulting two degrees of freedom in the robot’s arms allow a wide range of hand poses, while the two degrees of freedom in the head allow the robot to effectively track the face of each participant. The fundamental structure of the robot has a kinematically simplistic design with few degrees of freedom. This hardware setup allows the robot to imitate a wide range of hand poses, effectively track the face of each participant, and perform autonomous hand/arm motions during interactive play. Additionally, the robot’s body is padded for safety, covered with a nonthreatening fur-like material, and equipped with LEDs in the hands for positive feedback and a speaker for auditory instructions and positive feedback. The main role that it plays is free play in the early social development of the child, for which it has integrated detachable arms and head, as well as a base that can be attached to a table. The robot’s appearance resembles a toy to attract the attention of young children with ASD and to avoid, as far as possible, being intimidating.
2.6. Cozmo
Cozmo (Figure 1f) is a robot, powered by a smartphone app, used in therapy for children with ASD. This robot is shaped like a crane truck, which is attractive for children. It can be moved by wheels and has sensors to detect commands, which implies the presence of hardware components capable of detecting specific input signals or patterns (instrument that detects and measures physical properties) and associated software to interpret these signals as user commands. Taking advantage of these characteristics, Davide et al. [46] work with a series of interactive cubes that can be used in different ways in therapies for children with ASD.
3. Therapies and Activities
3.1. Social Stories
Social stories (SS) are short and educational stories for children. These stories show realistic pictures that are intended to help an autistic child better understand and/or navigate his world [50]. For this type of therapy, it is essential that the robot can emit sound, i.e., it has a loudspeaker. In addition, it is also useful to accompany the voice with images or pictograms, which can be obtained from a tablet or printed on paper. Given the characteristics of all the robots, Probo is the robot best suited to this type of activity, as it has a loudspeaker to tell the story, a tablet to reproduce images, and can make gestures to capture the child’s attention. Other robots such as KASPAR or NAO can also be used, but an external tablet must be added.
This type of therapy starts with an introduction; in the case of the study by Davide et al. [47], it starts with “The story starts now” or “Let’s listen to the story”, etc. Then, taking into account the child’s attention, three global questions are asked immediately after the end of the story. Then, Probo, the robot, creates the experimental task by giving the necessary clues to the participant from the story. Afterward, the task clues are put into practice in a natural and appropriate everyday environment, offering help to the child to give the correct answers. Finally, feedback is given to the child.
3.2. Imitation Gesture
A variant of social stories is the imitation gesture. This type of therapy uses a robot to try to get children to imitate his gestures. It is a very complex therapy and requires robots with a high number of degrees of freedom, because it is necessary to be able to reproduce the gesture as well as possible. Robots that are best suited to this type of therapy are NAO and KASPAR, as they have a great capacity to reproduce gestures by means of their joints (arm, neck, etc.). In the case of NAO, a wide range of movements can be achieved; not only movements with the torso and arms, but also movements with the lower limbs; this robot, in addition to performing gestures, can be programmed to provide feedback and motivate the child, thus maintaining the child’s attention in a better way.
In [28], the authors implemented 20 commonly used gestures in daily life. In this case, a virtual robot is used, not a physical robot, a computer simulation model that mimics the behaviour of the NAO robot. These gestures are used in everyday life as a greeting or to show emotions. In addition, audio clips are added that describe each gesture. In each of the clips, the gesture and the corresponding speech start at the same time. In this way, the children are able to watch videos of gestures while listening to the audio clips.
3.3. Games Therapies
This therapy uses structured play to promote social, emotional, and cognitive development. Play therapists work on social interaction, imagination, and creativity. Throughout the review, many structured games were observed to work in different areas, such as memory, social skills or patience, objects or living beings, colours, etc. [51]. Some of these structured game therapies, such as series games, although simple, manage to work in several areas, where the child works to understand basic concepts and overcome rigidity (difficulty in following orders) [52].
In this case, a minimum requirement is that the robot can reproduce sound (to give the commands). But to perform the therapy dynamically and to keep the child’s attention, feedback is necessary. Moreover, as there is a great variety of structured games, the necessary capabilities of each robot vary, from only needing sound to needing LEDs, movements, image capturing, etc., with NAO being the most complete robot in this sense.
Various studies use this kind of therapy, such as Wainer et al. [45], where players faced each other during each session, and to play the video game cooperatively on the horizontal screen, players had to synchronise and coordinate their actions properly; the game did not register the actions of a single player if they were not performed at the same time and in the same way as those of the other player [11].
3.4. Joint Attention
In this type of therapy, children attend to the same thing and they are mutually aware they are doing so, responding to questions. For autism, it is very difficult for children to do it because they lose interest quickly. Joint attention is the focus of many early intervention studies on autism. Collaborative attention refers to the development of a style of attention that involves cooperation and collaboration with others, as well as the development of specific skills that involve sharing ideas with others. This involves the development of skills such as pointing and showing objects and establishing a relationship between people [53].
As in games therapies, this type of therapy is very varied. Mainly, the voice or sound of the robot is required to capture the child’s attention, but any type of stimulus can be introduced (sound, image, gesture, lights, etc.); depending on the level of autism, several could be introduced at the same time. However, any of the previously described robots could be used, taking into account how we want to focus the therapy. It is also important to consider that, for this kind of therapy, NAO, KASPAR, and Cozmo are the robots with the best characteristics.
Some studies propose a simple task based on instruction, response, and consequence, such as David et al. [46]. Other articles used a complex system that includes a humanoid robot that provides joint attention signals. For example, in [54], a humanoid robot, two target monitors that could be activated contingently when children looked at them, an attention-tracking subsystem consisting of four spatially distributed cameras, and a controller of these elements reporting results and responding in real time, are used to work with this type of therapy.
3.5. Learning Distrust and Deception
This activity or set of activities is very complex. They are included in social skills therapies. It is about teaching children to be wary of possible situations where they can be fooled. For this, it is necessary that children learn to identify deception. It is reasonable to expect children to gain confidence (acquire the skill of distrust and deception), because their ability to understand their environment increases with age. This expansion shows people who have nothing good to say about children or who do not want children. A trust option helps children avoid being misled by information from those people and also ensures that they receive authentic information that meets their developmental and life needs [55].
Zhang et al. [56] show that children with ADS can learn, through activities with the humanoid robot NAO, the distrust tasks. The tasks of mistrust and deception require a deep understanding and manipulation of the mental states of others [55]. Children typically learn these rules through interpersonal interactions and by interpreting various verbal and non-verbal social cues from past experiences [56]. Overcoming these tasks involves the ability to perceive relativity and cope with more advanced and complex information, ultimately leading to the development of cognitive skills and social understanding. This type of therapy is hardly ever developed with robots, as it is very complex. In these studies, NAO was used because it is a humanoid robot (with a human-like appearance) and can perform complete movements and reproduce sound [56].
References
- Reviriego Rodrigo, E.; Bayón Yusta, J.C.; Gutiérrez Iglesias, A.; Galnares- Cordero, L. Trastornos Del Espectro Autista: Evidencia Científica Sobre La Detección, El Diagnóstico y El Tratamiento. In Informes de Evaluación de Tecnologías Sanitarias; Servicio de Evaluación de Tecnologías Sanitarias del Ministerio de Sanidad: País Vasco, Spain, 2022.
- Zeidan, J.; Fombonne, E.; Scorah, J.; Ibrahim, A.; Durkin, M.S.; Saxena, S.; Yusuf, A.; Shih, A.; Elsabbagh, M. Global Prevalence of Autism: A Systematic Review Update. Autism Res. 2022, 15, 778–790.
- Yang, L.; Chen, F.; He, X.; Tong, Y.; Li, Q.; Yang, T.; Peng, R.; Wang, H.; Shi, Z. Global Burden and Inequality of Autism Spectrum Disorders: Based on Data from the 2019 Global Burden of Disease Study. Prev. Med Rep. 2023, 36, 102511.
- Fuentes, J.; Hervás, A.; Howlin, P. ESCAP Practice Guidance for Autism: A Summary of Evidence-Based Recommendations for Diagnosis and Treatment. Eur. Child. Adolesc. Psychiatry 2021, 30, 961–984.
- Szymona, B.; Maciejewski, M.; Karpiński, R.; Jonak, K.; Radzikowska-Büchner, E.; Niderla, K.; Prokopiak, A. Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research. Sensors 2021, 21, 3720.
- Casas-Bocanegra, D.; Gomez-Vargas, D.; Pinto-Bernal, M.J.; Maldonado, J.; Munera, M.; Villa-Moreno, A.; Stoelen, M.F.; Belpaeme, T.; Cifuentes, C.A. An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD. Actuators 2020, 9, 91.
- Alnajjar, F.; Cappuccio, M.; Renawi, A.; Mubin, O.; Loo, C.K. Personalized Robot Interventions for Autistic Children: An Automated Methodology for Attention Assessment. Int. J. Soc. Robot. 2021, 13, 67–82.
- Amirova, A.; Rakhymbayeva, N.; Zhanatkyzy, A.; Telisheva, Z.; Sandygulova, A. Effects of Parental Involvement in Robot-Assisted Autism Therapy. J. Autism Dev. Disord. 2023, 53, 438–455.
- Fuentes-Alvarez, R.; Morfin-Santana, A.; Ibañez, K.; Chairez, I.; Salazar, S. Energetic Optimization of an Autonomous Mobile Socially Assistive Robot for Autism Spectrum Disorder. Front. Robot. AI 2023, 9.
- Lee, J.; Takehashi, H.; Nagai, C.; Obinata, G.; Stefanov, D. Enhancement of the Communication Effectiveness of Interactive Robots for Autism Therapy by Using Touch and Colour Feedback. Paladyn 2014, 5, 53–63.
- Pakkar, R.; Clabaugh, C.; Lee, R.; Deng, E.; Mataricmataric, M.J. Designing a Socially Assistive Robot for Long-Term In-Home Use for Children with Autism Spectrum Disorders. arXiv 2020, arXiv:2001.09981.
- Georgescu, A.L.; Koehler, J.C.; Weiske, J.; Vogeley, K.; Koutsouleris, N.; Falter-Wagner, C. Machine Learning to Study Social Interaction Difficulties in ASD. Front. Robot. AI 2019, 6, 32.
- Di Nuovo, A.; Conti, D.; Trubia, G.; Buono, S.; Di Nuovo, S. Deep Learning Systems for Estimating Visual Attention in Robot-Assisted Therapy of Children with Autism and Intellectual Disability. Robotics 2018, 7, 25.
- Singh, A.; Raj, K.; Kumar, T.; Verma, S.; Roy, A.M. Deep Learning-Based Cost-Effective and Responsive Robot for Autism Treatment. Drones 2023, 7, 81.
- Billing, E.; Belpaeme, T.; Cai, H.; Cao, H.L.; Ciocan, A.; Costescu, C.; David, D.; Homewood, R.; Garcia, D.H.; Esteban, P.G.; et al. The DREAM Dataset: Supporting a Data-Driven Study of Autism Spectrum Disorder and Robot Enhanced Therapy. PLoS ONE 2020, 15.
- Yun, S.S.; Kim, H.; Choi, J.; Park, S.K. A Robot-Assisted Behavioral Intervention System for Children with Autism Spectrum Disorders. Rob. Auton. Syst. 2016, 76, 58–67.
- Mihalache, D.; Sokol-Hessner, P.; Feng, H.; Askari, F.; Reyes, N.; Moody, E.J.; Mahoor, M.H.; Sweeny, T.D. Gaze Perception from Head and Pupil Rotations in 2D and 3D: Typical Development and the Impact of Autism Spectrum Disorder. PLoS ONE 2022, 17, e0275281.
- González, J.C.; Pulido, J.C.; Fernández, F. A Three-Layer Planning Architecture for the Autonomous Control of Rehabilitation Therapies Based on Social Robots. Cogn. Syst. Res. 2017, 43, 232–249.
- Sandygulova, A.; Zhexenova, Z.; Tleubayev, B.; Nurakhmetova, A.; Zhumabekova, D.; Assylgali, I.; Rzagaliyev, Y.; Zhakenova, A. Interaction Design and Methodology of Robot-Assisted Therapy for Children with Severe ASD and ADHD. Paladyn 2019, 10, 330–345.
- Scassellati, B.; Boccanfuso, L.; Huang, C.-M.; Mademtzi, M.; Qin, M.; Salomons, N.; Ventola, P.; Shic, F. Improving Social. Skills in Children with ASD Using a Long-Term, in-Home Social Robot. Sci. Robot. 2018, 3, eaat7544.
- Huijnen, C.A.G.J.; Lexis, M.A.S.; Jansens, R.; de Witte, L.P. Mapping Robots to Therapy and Educational Objectives for Children with Autism Spectrum Disorder. J. Autism Dev. Disord. 2016, 46, 2100–2114.
- Gkiolnta, E.; Zygopoulou, M.; Syriopoulou-Delli, C.K. Robot Programming for a Child with Autism Spectrum Disorder: A Pilot Study. Int. J. Dev. Disabil. 2023, 69, 424–431.
- Kaboski, J.R.; Diehl, J.J.; Beriont, J.; Crowell, C.R.; Villano, M.; Wier, K.; Tang, K. Brief Report: A Pilot Summer Robotics Camp to Reduce Social Anxiety and Improve Social/Vocational Skills in Adolescents with ASD. J. Autism Dev. Disord. 2015, 45, 3862–3869.
- Costescu, C.A.; Vanderborght, B.; David, D.O. Reversal Learning Task in Children with Autism Spectrum Disorder: A Robot-Based Approach. J. Autism Dev. Disord. 2015, 45, 3715–3725.
- Chung, E.Y. han Robot-Mediated Social Skill Intervention Programme for Children with Autism Spectrum Disorder: An ABA Time-Series Study. Int. J. Soc. Robot. 2021, 13, 1095–1107.
- Xie, B.; Park, C.H. Dance with a Robot: Encoder-Decoder Neural Network for Music-Dance Learning. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 526–528.
- Zheng, Z.; Young, E.M.; Swanson, A.R.; Weitlauf, A.S.; Warren, Z.E.; Sarkar, N. Robot-Mediated Imitation Skill Training for Children with Autism. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 682–691.
- So, W.C.; Wong, M.K.Y.; Cabibihan, J.J.; Lam, C.K.Y.; Chan, R.Y.Y.; Qian, H.H. Using Robot Animation to Promote Gestural Skills in Children with Autism Spectrum Disorders. J. Comput. Assist. Learn. 2016, 32, 632–646.
- Feng, H.; Mahoor, M.H.; Dino, F. A Music-Therapy Robotic Platform for Children With Autism: A Pilot Study. Front. Robot. AI 2022, 9, 855819.
- Silva, V.; Pereira, A.P.; Soares, F.; Leão, C.P.; Jurdi, A.; Sena Esteves, J.; Hertzberg, J. Social Stories for Promoting Social Communication with Children with Autism Spectrum Disorder Using a Humanoid Robot: Step-by-Step Study. Technol. Knowl. Learn. 2023.
- Han, B.Y.; Yim, D.; Kim, Y.T.; Lee, S.J.; Hong, K.H. The Effect of a Story Intervention on the Syntactic Skills of Children with Autism Spectrum Disorders by Using an Educational Humanoid Robot. Commun. Sci. Disord. 2016, 21, 244–261.
- Wang, C.P. Training Children with Autism Spectrum Disorder, and Children in General with AI Robots Related to the Automatic Organization of Sentence Menus and Interaction Design Evaluation. Expert. Syst. Appl. 2023, 229.
- Cano, S.; Díaz-Arancibia, J.; Arango-López, J.; Libreros, J.E.; García, M. Design Path for a Social Robot for Emotional Communication for Children with Autism Spectrum Disorder (ASD). Sensors 2023, 23, 5291.
- Alarcon, D.A.U.; Cano, S.; Paucar, F.H.R.; Quispe, R.F.P.; Talavera-mendoza, F.; Zegarra, M.E.R. Exploring the Effect of Robot-based Video Interventions for Children with Autism Spectrum Disorder as an Alternative to Remote Education. Electronics 2021, 10, 2577.
- Freire, A.; Valente, A.; Filipe, V. Can NAO Robot Influence the Eye Gaze and Joint Attention of Mentally Impaired Young Adults? In Proceedings of the 9th International Conference on Software Development and Technologies for Enhancing Accessibility and Fighting Info-exclusion (DSAI); Association for Computing Machinery, Online, 2–4 December 2020; pp. 111–115.
- Bharatharaj, J.; Huang, L.; Al-Jumaily, A.; Mohan, R.E.; Krägeloh, C. Sociopsychological and Physiological Effects of a Robot-Assisted Therapy for Children with Autism. Int. J. Adv. Robot. Syst. 2017, 14, 1–11.
- Pop, C.A.; Simut, R.E.; Pintea, S.; Saldien, J.; Rusu, A.S.; Vanderfaeillie, J.; David, D.O.; Lefeber, D.; Vanderborght, B. Social Robots vs. Computer Display: Does the Way Social Stories Are Delivered Make a Difference for Their Effectiveness on ASD Children. J. Educ. Comput. Res. 2013, 49, 381–401.
- Boccanfuso, L.; Scarborough, S.; Abramson, R.K.; Hall, A.V.; Wright, H.H.; O’Kane, J.M. A Low-Cost Socially Assistive Robot and Robot-Assisted Intervention for Children with Autism Spectrum Disorder: Field Trials and Lessons Learned. Auton. Robot. 2017, 41, 637–655.
- Özcan, B.; Caligiore, D.; Sperati, V.; Moretta, T.; Baldassarre, G. Transitional Wearable Companions: A Novel Concept of Soft Interactive Social Robots to Improve Social Skills in Children with Autism Spectrum Disorder. Int. J. Soc. Robot. 2016, 8, 471–481.
- Dehkordi, P.S.; Moradi, H.; Mahmoudi, M.; Pouretemad, H.R. The Design, Development, and Deployment of RoboParrot for Screening Autistic Children. Int. J. Soc. Robot. 2015, 7, 513–522.
- Santos, L.; Annunziata, S.; Geminiani, A.; Ivani, A.; Giubergia, A.; Garofalo, D.; Caglio, A.; Brazzoli, E.; Lipari, R.; Carrozza, M.C.; et al. Applications of Robotics for Autism Spectrum Disorder: A Scoping Review. Rev. J. Autism Dev. Disord. 2023.
- Javed, M.A.; Younis, M.S.; Latif, S.; Qadir, J.; Baig, A. Community Detection in Networks: A Multidisciplinary Review. J. Netw. Comput. Appl. 2018, 108, 87–111.
- Coeckelbergh, M.; Pop, C.; Simut, R.; Peca, A.; Pintea, S.; David, D.; Vanderborght, B. A Survey of Expectations About the Role of Robots in Robot-Assisted Therapy for Children with ASD: Ethical Acceptability, Trust, Sociability, Appearance, and Attachment. Sci. Eng. Ethics 2016, 22, 47–65.
- Telisheva, Z.; Amirova, A.; Rakhymbayeva, N.; Zhanatkyzy, A.; Sandygulova, A. The Quantitative Case-by-Case Analyses of the Socio-Emotional Outcomes of Children with ASD in Robot-Assisted Autism Therapy. Multimodal Technol. Interact. 2022, 6, 46.
- Wainer, J.; Dautenhahn, K.; Robins, B.; Amirabdollahian, F. A Pilot Study with a Novel Setup for Collaborative Play of the Humanoid Robot KASPAR with Children with Autism. Int. J. Soc. Robot. 2014, 6, 45–65.
- David, D.O.; Costescu, C.A.; Matu, S.; Szentagotai, A.; Dobrean, A. Developing Joint Attention for Children with Autism in Robot-Enhanced Therapy. Int. J. Soc. Robot. 2018, 10, 595–605.
- Davide, G.; Pauline, C.; Federica, F.; Tiziana, P.; Agnieszka, W. Follow the White Robot: Efficacy of Robot-Assistive Training for Children with Autism-Spectrum Condition. Res. Autism Spectr. Disord. 2021, 86, 101822.
- Zapata, C.M.; Carmona, N. Wizard of Oz Experiment and Its Applications: An Overview. Dyna 2007, 151, 125–135.
- Mutawa, A.M.; Al Mudhahkah, H.M.; Al-Huwais, A.; Al-Khaldi, N.; Al-Otaibi, R.; Al-Ansari, A. Augmenting Mobile App with NAO Robot for Autism Education. Machines 2023, 11, 833.
- Camilleri, L.J.; Maras, K.; Brosnan, M. Autism Spectrum Disorder and Social Story Research: A Scoping Study of Published, Peer-Reviewed Literature Reviews. Autism Dev. Disord. 2022, 9, 21–38.
- Elbeltagi, R.; Al-Beltagi, M.; Saeed, N.K.; Alhawamdeh, R. Play Therapy in Children with Autism: Its Role, Implications, and Limitations. World J. Clin. Pediatr. 2023, 12, 1–22.
- Ornelas Barajas, A.; Al Osman, H.; Shirmohammadi, S. A Serious Game for Children with Autism Spectrum Disorder as a Tool for Play Therapy. In Proceedings of the 2017 IEEE 5th International Conference on Serious Games and Applications for Health (SeGAH), Perth, Australia, 2–4 April 2017; Volume 5, pp. 1–7.
- Kasari, C.; Gulsrud, A.C.; Wong, C.; Kwon, S.; Locke, J. Randomized Controlled Caregiver Mediated Joint Engagement Intervention for Toddlers with Autism. J. Autism Dev. Disord. 2010, 40, 1045–1056.
- Zheng, Z.; Nie, G.; Swanson, A.; Weitlauf, A.; Warren, Z.; Sarkar, N. A Randomized Controlled Trial of an Intelligent Robotic Response to Joint Attention Intervention System. J. Autism Dev. Disord. 2020, 50, 2819–2831.
- Yi, L.; Fan, Y.; Li, J.; Huang, D.; Wang, X.; Tan, W.; Zou, X.; Lee, K. Distrust and Retaliatory Deception in Children with Autism Spectrum Disorder. Res. Autism Spectr. Disord. 2014, 8, 1741–1755.
- Zhang, Y.; Song, W.; Tan, Z.; Zhu, H.; Wang, Y.; Lam, C.M.; Weng, Y.; Hoi, S.P.; Lu, H.; Man Chan, B.S.; et al. Could Social Robots Facilitate Children with Autism Spectrum Disorders in Learning Distrust and Deception? Comput. Hum. Behav. 2019, 98, 140–149.
More
Information
Subjects:
Others
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
601
Revisions:
4 times
(View History)
Update Date:
18 Mar 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No