Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Huaping Xiao | -- | 3376 | 2024-03-05 09:18:45 | | | |
| 2 | Fanny Huang | Meta information modification | 3376 | 2024-03-06 09:37:49 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Wang, Y.; Hao, T.; Liu, Y.; Xiao, H.; Liu, S.; Zhu, H. Dexterity of Anthropomorphic Soft Hand. Encyclopedia. Available online: https://encyclopedia.pub/entry/55860 (accessed on 26 June 2026).
Wang Y, Hao T, Liu Y, Xiao H, Liu S, Zhu H. Dexterity of Anthropomorphic Soft Hand. Encyclopedia. Available at: https://encyclopedia.pub/entry/55860. Accessed June 26, 2026.
Wang, Yang, Tianze Hao, Yibo Liu, Huaping Xiao, Shuhai Liu, Hongwu Zhu. "Dexterity of Anthropomorphic Soft Hand" Encyclopedia, https://encyclopedia.pub/entry/55860 (accessed June 26, 2026).
Wang, Y., Hao, T., Liu, Y., Xiao, H., Liu, S., & Zhu, H. (2024, March 05). Dexterity of Anthropomorphic Soft Hand. In Encyclopedia. https://encyclopedia.pub/entry/55860
Wang, Yang, et al. "Dexterity of Anthropomorphic Soft Hand." Encyclopedia. Web. 05 March, 2024.
Copy Citation
Humans possess dexterous hands that surpass those of other animals, enabling them to perform intricate, complex movements. Soft hands, known for their inherent flexibility, aim to replicate the functionality of human hands. By mimicking the shape, structure, and functionality of human hands, soft hands can partially replicate human-like movements, offering adaptability and operability during grasping tasks.
anthropomorphic soft hand
soft robotics
dexterous
1. Introduction
Over millions of years of evolutionary development, humans have developed remarkably dexterous hands that are unmatched by those of other animals. The complex structure of the human hand, encompassing an assemblage of bones, ligaments, and muscles, collaborates synergistically to combine robustness and delicate control, enabling both forceful and intricate maneuvers. In robotics, the advent of robots seeks to either replace or assist human efforts in executing specific tasks and operations. Robotic hands and end effectors are crucial components of robotic systems that directly interact with the external environment and are responsible for executing various actions, grasping, and manipulation tasks.
To enhance the flexibility of mechanical hands, traditional rigid robotic hands incorporate numerous motors, linkages, gears, and springs to achieve the desired functionality. However, this approach significantly increases the complexity of the structure. Although rigid humanoid hands are precise and responsive, they can cause irreparable damage when handling fragile objects [1][2][3]. Additionally, the potential weight of rigid structures can pose an injury risk during human–robot interactions. Contrarily, anthropomorphic soft hands leverage the inherent flexibility of their materials, offering remarkable advantages, such as compliance and high resistance to external impact, compression, torsion, and collisions [4][5][6]. These benefits stemming from their “soft” characteristics have prompted increased research in related studies.
Soft hands have received more attention due to their innate compliance, permitting interaction with the environment via techniques akin to those of natural organisms. The inherent compliance reduces the stringent requirements for complex and precise kinematic modeling and high-resolution sensor feedback, simplifying traditional grasping problems encountered by rigid robotic hands. The grasp of soft hands can be effectively controlled by adjusting the input pressure. The passive adaptability and compliance in their structure significantly simplify grasp planning problems [7][8]. Therefore, soft hands are a promising choice for human-centered machine grasping tasks, offering performance benefits such as interaction safety, grasp reliability, and cost-efficacy.
The recreation of humanoid dexterous hands is an ongoing pursuit in the field of robotics. By imitating the shape, structure, and functionality of human hands, soft humanoid dexterous hands can partially achieve human-like movements, providing broad adaptability and operability in grasping and hand manipulation [9][10]. It is foreseeable that soft humanoid dexterous hands will become a focal point in the development of robotic hands, finding increasingly widespread applications and market prospects in areas such as flexible grasping solutions in industrial production [11][12], medical rehabilitation [13][14][15][16], and home services [17][18].
However, there are several differences between human and soft hands. First, soft hands are still unable to match the flexibility and adaptability of human hands. Human hands possess exceptional perception and adjustment abilities, adapting to various shapes and environments, while soft hands face challenges when dealing with objects in complex three-dimensional (3D) spaces [19][20]. Second, the control systems of soft hands are relatively complex, potentially requiring advanced algorithms and sensing technologies to achieve fine manipulation similar to human hands [21][22]. The high coordination and flexibility exhibited by human hands during various tasks may necessitate further research and technological innovation for soft hands, while durability and stability present additional challenges [23][24], requiring attention.
2. Dexterity and Gripping/Manipulation Performance
The grasping and manipulation capabilities of the human hand are highly complex and remarkable, showcasing the unique adaptability and flexibility developed throughout human evolution. First, the five fingers of the human hand possess independent motion capabilities, each with its own joint system that allows for individual flexion, extension, abduction, and adduction. This multi-joint structure grants the human hand exceptional dexterity, enabling the fingers to adapt to objects of various shapes and sizes (Figure 1a). The human hand also exhibits coordinated movements, allowing the fingers to work together to accomplish intricate manipulation tasks. The synergy of the fingers allows the human hand to perform precise grasping actions, such as delicately picking up small objects or adjusting the posture of larger objects. This coordination enables efficient object manipulation in various tasks. The flexibility of the human hand is driven by its highly complex biological structure and the remarkable neural control system, enabling independent, precise movements of the joints in a 3D space. The motion of these joints is intricately regulated by neural control systems, achieving highly coordinated and flexible control over the fingers.
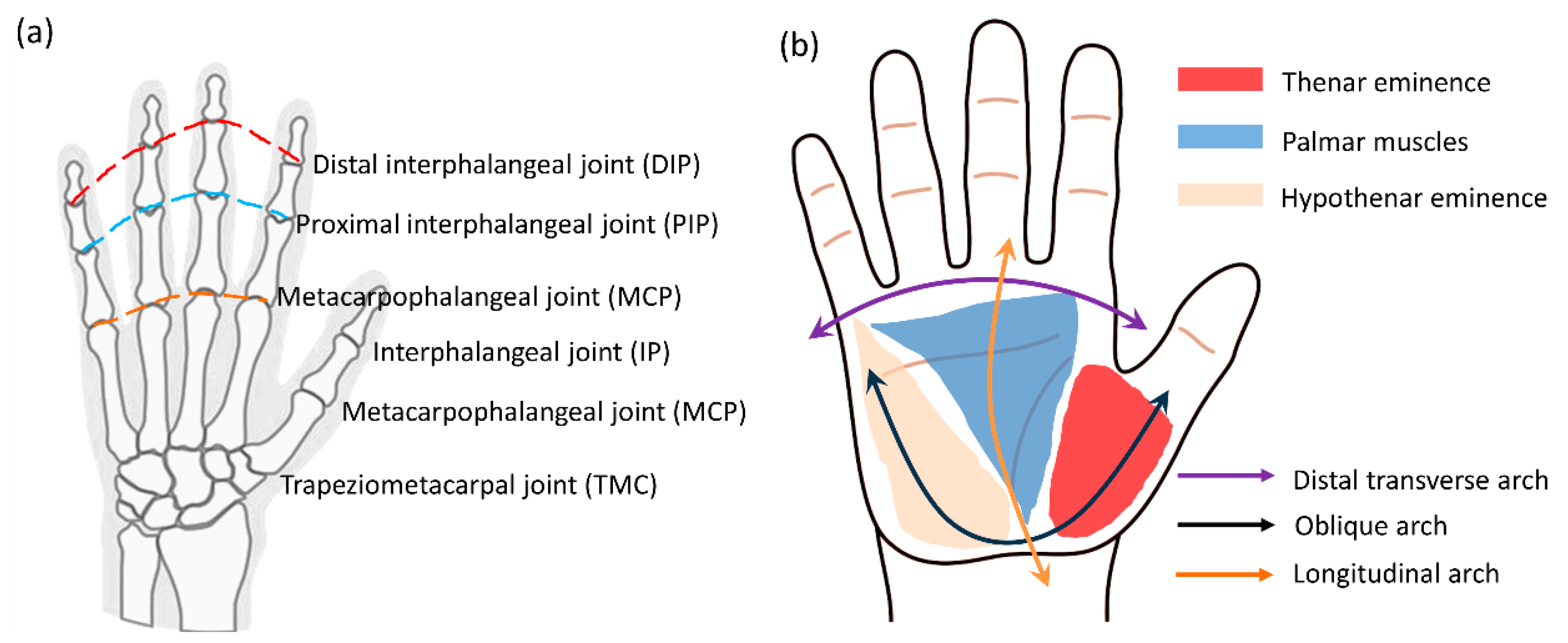
Figure 1. Schematic expression of (a) human hand joints; (b) and muscle groups and palm arches.
2.1. Nonanthropomorphic Grippers
As the end effector, the complete functionality of a robot hand is essential in the field of automation, with grasping being the most easily achievable operation. Therefore, two-finger and multi-finger soft grippers are fundamental for simulating human hand movements.
Soft grippers can grasp and release objects while executing specific actions. Pneumatic grippers are the most commonly employed, deforming when inflated, which enables approaching and securely grasping an object. The goal of research on robots using two-finger grippers for grasping tasks is to build a grasping recognition system that is fast, accurate, and appropriate for use by robotic hands [25][26]. However, multi-finger grippers are often employed since two-finger grippers frequently find it difficult to successfully complete grasping tasks when dealing with objects of complex shapes. Due to their multi-finger design, they are capable of multi-contact grasping of target objects, improving the grasping success rate and reliability [27][28].
Two-finger and multi-finger grippers demonstrate efficiency and speed when repeatedly grasping the same type of object. Soft grippers have a lower design time and production cost than other actuators due to their comparatively simpler structure. Therefore, they are popular for simple tasks in industrial applications and include commercial products, such as Festo’s tentacle gripper and mGrip from Soft Robotics Inc. [29][30][31].
In this context, a significant emphasis has been placed on enhancing output force and actuation speed when developing novel grippers. To achieve these objectives, many studies have integrated bistable mechanisms into the soft gripper design [26][32], which are characterized by two stable equilibrium states, representing local minima in the total potential energy. The incorporation of bistable mechanisms reduces control complexity, enables fast motions, and promotes energy conservation.
However, the functionality of these grippers still suffers from single grasping mode, enveloped grasping, or pinch grasping, limiting their applications and reducing their reliability in grasping small objects. Even in dual grasping mode [25], these grippers are still limited to object grasping, lacking the capacity for intricate manipulation.
2.2. Underactuated Anthropomorphic Soft Hands
Two-finger and multi-finger grippers face challenges in adapting to situations where the objects to be grasped are constantly changing, necessitating the use of a dexterous hand. In this context, the term “dexterity” refers to the ability of the hand to exhibit a wide range of postures. A hand is considered more dexterous when it displays higher variability, increasing its grasping diversity and in-hand manipulation involving different grasping patterns. For instance, small objects can be precisely grasped with a few fingers, while larger objects may require an enveloping grip, and thin objects can be grasped via a thumb opposition grip [4][5][33].
To adapt to a wider range of object shapes and sizes, soft hands have been designed and developed, inspired by the shape of the human hand. The human hand can manipulate objects of various morphologies and materials and can tune the pose and position of objects (in-hand manipulation) with high dexterity in limited spaces. Constructing dexterous anthropomorphic hands capable of autonomously grasping and manipulating objects has been an important aim during robotic system design.
Represented by the RBO hand, these developed soft hands are primarily designed based on the principle of passive adaptation to the shape of the object [8][34]. Passive adaptability enables the hand to dynamically adjust its surface in response to contact forces, achieving a shape-matching effect with the object. Enhancing shape-matching improves the contact area between the hand and the object, eliminating the requirement for explicit sensing and control [15][35][36]. This not only increases resilience against uncertainties in hand position, finger control, and environmental factors, but also enables a passive adaptive hand to establish contact in any direction without sustaining damage [37]. Consequently, the compliant hand can effectively utilize the environment as a guide during grasping motions, further strengthening grip robustness. Therefore, passive adaptability is key in soft hand design to achieve successful grasping under uncertainty [5][38].
Traditionally, achieving dexterous grasping capabilities in robotic hands involved complex multi-joint structures and intricate actuation mechanisms. In addition to requiring sophisticated perception and control systems, these hands are expensive and challenging to design [39]. A significant direction in soft hand design is to simplify the system and improve robustness. Underactuated soft hands utilize reasonable structural designs to control hand movements with fewer degrees of freedom (DOFs) than finger joints, reducing the complexity of the entire hand system while improving reliability [40].
Unlike rigid dexterous hands, soft hands do not require additional actuators to achieve human-like bending motions. For instance, Feix et al. introduced a configuration featuring a single actuator per finger, enabling the soft hand to effectively accomplish 31 out of 33 grasp postures outlined in the widely recognized Feix taxonomy [41]. Similarly, the RBO 2 hand, with a mere 7 DOFs, successfully executes 31 out of 33 grasp postures from the Feix taxonomy [34]. Furthermore, Fras et al. proposed a biomimetic hand design where each finger possessed only one DOF yet was still capable of performing a diverse range of human-like gestures and effectively grasping various objects [36].
2.3. Dexterous Anthropomorphic Hands
Underactuated hands have shown robustness in grasping tasks, providing cost-effectiveness and system simplification. However, their operational capabilities are inherently limited due to their underactuated nature. This presents a trade-off between robustness and functionality in robotic hand design. A notable limitation of underactuated soft hands is their restricted dexterity, particularly in manipulating and repositioning objects [19][42]. Moreover, the majority of soft hands, limited by soft mechanical design and manufacturing technologies, typically only exhibit several DOFs [5][34][43]. Underactuated fingers constrain the robotic hand’s workspace, thus limiting its flexibility. This shortcoming hinders their broad application in complex, human-centric tasks. This is primarily attributed to the limited dexterity of soft actuators, which typically function as the fingers in soft hands. Most soft actuators have pre-defined motion trajectories, resulting in fixed trajectories for the fingers and overlapping motion limited to a singular point [44][45][46]. This paradox has spurred research into specific operational processes and the design of more dexterous hands, which are intelligent, multipurpose mechanical structures designed for a variety of tasks [4][6][20][47].
The common workspace between fingers is critical for in-hand manipulation. Designing multi-DOF soft fingers is a viable solution to address this, as demonstrated by integrating multiple actuators into a single finger [5][19][48][49]. Yet, this integration increases finger size and weight. Therefore, developing compact, lightweight multi-DOF soft fingers remains a valuable goal. Additionally, biomimetic dexterity, encompassing both appearance and kinematic functionality, is a key consideration in soft hand design, aiming for the effective handling of everyday objects.
Human-like designs with additional actuators can significantly enhance soft hand flexibility. Notable examples include the BCL-13 hand [20], the BCL-26 hand [5], the Blue hand [19], and particularly, the Blue hand with a total of 21 DOFs, able to perform all 33 grasp types in the Feix taxonomy and pass all Kapandji tests for thumb dexterity [19]. Another example is the dual-mode actuators, which enable fingers to execute both bending and twisting motions [35]. With ongoing advancements in soft robotics, soft humanoid dexterous hands are evolving towards more humanoid appearances and motion characteristics, as seen in the BCL-26 hand [5], the RBO Hand 3 [6], and others [47][50][51].
The thumb and thenar muscles play a vital role in hand dexterity (Figure 1b). The thumb is opposable, meaning it can move in opposition to the other fingers, allowing for precision grasping and manipulation of objects. This opposable movement is made possible by the coordinated action of the thenar muscles, which control the movements of the thumb. The thumb is the primary contributor to hand motion, achieving nearly 40% of overall hand movements [52]. The thenar muscles (Figure 1b) are significant for thumb movement and essential for various daily actions, such as grasping, gripping, pinching, clamping, twisting, and tying [4][53]. First, the thumb can oppose the other four fingers, which is a prerequisite for grasping objects [50]. Second, the thumb can simultaneously translate, rotate, and flex, which is an ability that other primate hands are incapable of [54]. During the object-grasping process, the thumb adapts its position based on the shape of the object. This necessitates the carpometacarpal (CMC) joint of the thumb to perform not only flexion and extension motions but also abduction and adduction movements. These various thumb motions enable different types of grasping and pinching actions [55].
Despite the importance of the thumb, its motion differs significantly from that of the other fingers, and research on the mechanical design of the thumb is limited [56]. Many modular designs still treat the thumb the same as the other fingers, merely placing it in an opposing configuration [57], severely limiting its functionality and affecting the grasping ability of the entire hand. Recently, studies have revealed a flexible thumb with an active thenar, improving the grasping ability of the soft hand [4]. However, practical considerations, such as space constraints for actuators weight and cost limitations, challenge the implementation of multiple DOFs in the thumb.
Previous research has often overlooked the functionality of the palm, focusing primarily on soft finger designs. The hand muscles facilitate palm flexibility, allowing it to bend and form a concave shape, which is essential for grasping objects. The three key arches, namely the longitudinal, distal transverse, and oblique, achieve dexterous palm motion (Figure 1b) [58]. Many soft, humanoid, dexterous hands replace the palm with rigid materials, lacking actuation and limiting their grasping and manipulation capabilities. To address this, researchers have incorporated flexible actuators into the palm, enabling active palm-like functions. For instance, Wang et al. proposed an active palm with pneumatic actuation to enhance hand dexterity [51][59], while the RBO Hand 2 and 3 feature activatable anthropomorphic palms [6][34]. Experimental results have demonstrated that the active palm in anthropomorphic hands is a key factor in improving the performance of thumb opposition and envelope grasping [47][60]. A comparison of the main features of various types of soft hands is presented in Table 1.
Table 1. Summary of anthropomorphic soft hands.
| Materials | Fabrication | Actuation | Control | DOF | Main Features | Category | Year | Ref |
|---|---|---|---|---|---|---|---|---|
| Dragon skin-10, Dragon skin-20, Dragon skin-30, Ecoflex 00-10 | Casting molding | Pneumatic | Closed-loop control | 14 | Flexible thenar | Anthropomorphic dextureous hand | 2022 | [4] |
| Dragonskin 10, Ecoflex 00-30 | Casting molding | Pneumatic | coordinated control | 6 | Replicate the human-like grasp postures | Anthropomorphic dextureous hand | 2022 | [7] |
| Silicone rubber, fibers | Casting molding | Pneumatic | Open-loop control | 12 | Flexible palm | Underactuated anthropomorphic hand | 2013 | [8] |
| Dragon skin 30 | Casting molding | Open-loop control | 21 | Soft parallel palm | 2023 | [19] | ||
| Ecoflex 00-50, Mold Star 30, ABS | Casting molding | Pneumatic | Open-loop control | 13 | Grasping planning | Anthropomorphic dextureous hand | 2018 | [20] |
| Dragon Skin 10, fibers | Casting molding | Pneumatic | Open-loop control | 22 | Flexible operation function | Anthropomorphic dextureous hand | 2022 | [50] |
| TPU, ABS | — | Fluidic and Tendon actuation | Open-loop control | 5 | SMA-Based Exo-Glove | Soft Exo-Glove | 2023 | [61] |
| Resin, PET, Nylon gauze | Planar laser cutting and stacking | Pneumatic | Open-loop control | 6 | Hybrid pneumatic actuators | Underactuated anthropomorphic hand | 2021 | [62] |
| VytaFlex 20, ELASTOSIL M 4601 | 3D printing, soft lithography | Pneumatic | Open-loop control | 12 | Multi material 3D printed | Anthropomorphic dextureous hand | 2020 | [63] |
| Dragon skin-10, Dragon skin-30, fibers | Casting molding | Pneumatic | Open-loop control | 3 | SMP actuated | Dextureous finger | 2016 | [64] |
| Dragon Skin 10, Ecoflex 00-30, nylon thread, fibers | Casting molding | Pneumatic | Open-loop control | 12 | Highly integrated design | Anthropomorphic dextureous hand | 2023 | [65] |
| Vero, Agilus30 | 3D printing | Pneumatic | Closed-loop control | 5 | 3D printed fingers | Underactuated anthropomorphic hand | 2021 | [66] |
| PDMS, CNTs | 3D printing | Light-driven | Open-loop control | 5 | SMA actuated | Underactuated anthropomorphic hand | 2020 | [67] |
| PDMS, SMA, fiberglass | Casting molding | Tendon-driven | Open-loop control | 10 | SMA actuated | Underactuated anthropomorphic hand | 2023 | [68] |
| TPU, SMA | 3D printing | SMA | Open-loop control | 10 | Elastic joints and soft pads | Anthropomorphic dextureous hand | 2014 | [69] |
| TPU | 3D printing | Pneumatic | Open-loop control | 10 | Soft-Rigid Hybrid fingers | Anthropomorphic dextureous hand | 2023 | [70] |
| Silicone rubber, ABS | — | Pneumatic | Open-loop control | 5 | Self-healing soft fingers | Underactuated anthropomorphic hand | 2017 | [71] |
| Dragonskin-10, ecoflex 00-30, fibers | Casting molding | Pneumatic | Closed-loop control | - | Deployable, atraumatic grasper | Surgical grasper | 2014 | [72] |
| Smooth-Sil 936, fibers | Casting molding | Fluid-driven | Open-loop control | 1 | Pneu-net actuator | Dextureous finger | 2014 | [73] |
| Ecoflex-30, SMA, PDMS | Casting molding | SMA | Closed-loop control | 5 | ECF jet | Underactuated anthropomorphic hand | 2011 | [74] |
| TPU | 3D printing | Tendon | Open-loop control | 5 | Completely soft | Soft Exo-Glove | 2021 | [75] |
| Electro-conjugate fluid(ECF) | — | ECF jet | Open-loop control | 5 | Planar Laser Cutting and Stacking | Underactuated anthropomorphic hand | 2021 | [76] |
| NinjaFlex, particles | 3D printing | Pneumatic | Closed-loop control | 3 | Humanoid hand skeleton | Dextureous finger | 2019 | [77] |
| Agilus30, Vero | 3D printing | Pneumatic | Open-loop control | 5 | Pneumatic Exo-Glove | Soft Exo-Glove | 2016 | [78] |
| Dragon Skin 10, Ecoflex 00-30 | — | Pneumatic | Myoelectric control | 4 | 3D printed | Underactuated anthropomorphic hand | 2017 | [79] |
| Dragon skin 30, paper | Casting molding | Pneumatic | Open-loop control | 4 | Dualmodule pneumatic actuator | Nonanthropomorphic Grippers | 2020 | [25] |
| Silicone, PLA | Casting molding | Tendon-driven | Open-loop control | 2 | Two-finger grip | Nonanthropomorphic Grippers | 2022 | [26] |
| Silicone, fiber | Casting molding | Pneumatic | Open-loop control | 7 | Active Palm | Underactuated anthropomorphic hand | 2016 | [34] |
| Vero White, Tango Black | 3D printing | Open-loop control | 18 | Soft-rigid hybrid hand | Anthropomorphic dextureous hand | 2018 | [37] | |
| TPU | 3D printing | Pneumatic | Open-loop control | 9 | Hand sign language | Anthropomorphic dextureous hand | 2019 | [42] |
| Fiber, M4601, memory foam | Casting molding | hydraulic | Open-loop control | 8 | Underwater gripper | Nonanthropomorphic Grippers | 2016 | [80] |
| Tendons, Agilus Black material | 3D printing | Tendon-driven | Open-loop control | 3 | Grasping | Underactuated anthropomorphic hand | 2022 | [43] |
| SmoothSil-960, MoldStar-30 | Casting molding | Pneumatic | Open-loop control | 9 | Three-finger grip | Nonanthropomorphic Grippers | 2023 | [81] |
| Smooth-Sil 945, Ecoflex 00-30 | Casting molding | Pneumatic | Open-loop control | 8 | Delicate In-hand manipulation | Soft robotic hand | 2020 | [82] |
2.4. Methods to Enhance Grasping and Manipulation Performance
To augment the functionality of soft humanoid hands, researchers have embarked on innovative design explorations aimed at expanding their application range while concurrently enhancing their flexibility. A predominant challenge in the realm of soft hands is their limited output force [83][84]. This constraint directly impacts their carrying capacity, narrowing the spectrum of objects they can effectively grasp and thereby curtailing their application breadth. To address this, the integration of variable stiffness elements into soft hand systems has been proposed [85][86]. Activating these elements increases the structural stiffness of the gripper, aiding in the lifting of heavier loads. These elements bolster the carrying capacity of soft hands without markedly compromising their compliance and adaptability when inactive. Particle jamming is the most popular approach for variable stiffness due to its safety and easy availability [87][88]. Other variable stiffness methodologies include interference-based methods [89], motor-based methods [90], variable modulus-based methods [91], electromagnetic field-based methods [92], and phase change material-based methods [93].
Despite these improvements, the maximum carrying capacity of soft hands still lags behind that of conventional rigid grippers and human hands. For instance, the pneumatic soft hand integrated with shape memory polymers, as developed by Zhang et al., can lift a 1.5 kg dumbbell using three fingers—a notable achievement for a soft gripper, yet still trailing behind its rigid counterparts [94]. The incorporation of variable stiffness elements often introduces additional actuation methods and elongates response times.
In recent years, some researchers have explored the fusion of rigid and soft structures, employing collaborative mechanisms to synergize their respective advantages, thereby achieving superior overall performance [62]. These rigid–soft coupling designs have demonstrated significant promise. For example, the single–stable rigid–soft coupling gripper proposed by Tang et al. can securely grasp an egg and stably lift an 11.4 kg dumbbell [95]. Liu et al. developed flexible hybrid pneumatic actuators for soft hand fingers [62]. The soft humanoid hand exhibits satisfactory comprehensive performance, including fast response, substantial grasping force, affordability, lightweight construction, and ease of fabrication and repair. Nonetheless, these designs confront challenges, such as not fully capitalizing on the high output force of rigid structures and the flexibility of soft structures. Moreover, current rigid–soft coupling gripper designs often feature complex and bulky structures, which substantially limit their compliance. Furthermore, high stability is imperative for robotic grippers, as soft robotic grippers frequently undergo deformation or prolonged vibrations due to external forces like gravity or impact, potentially impairing their operational efficiency and precision.
Environments containing lubricants like water or oil can significantly impact the performance of soft humanoid hands. The frictional interaction in such scenarios is crucial for stable grasping. Human fingertip skin undergoes various degrees of stretching during object grasping, with ridge patterns bolstering grasping ability [96][97]. In wet environments, fingerprints enhance the grasping area, thereby improving the success rate [98][99]. This mechanism differs from the adhesive effect observed in tree frog toe pads or gecko claw setae, which operate at the nanoscale [100][101]. Human fingerprints are relatively macroscopic and primarily leverage frictional changes to augment grasping. Hao et al. indicated that fingerprint-like surface textures significantly enhanced the pinch-grasping ability of soft humanoid hands in water and oil lubrication conditions, surpassing the performance on smooth surfaces [102]. Additionally, applying a concentrated hyaluronic acid solution to the surfaces with fingerprint-like textures enabled the soft hand to grasp a variety of common medical instruments, marking a substantial improvement over smooth surfaces [103].
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475.
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935.
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690.
- Hao, T.; Xiao, H.; Liu, S.; Zhang, C.; Ma, H. Multijointed pneumatic soft hand with flexible thenar. Soft Robot. 2022, 9, 745–753.
- Zhou, J.; Chen, X.; Chang, U.; Lu, J.-T.; Leung, C.C.Y.; Chen, Y.; Hu, Y.; Wang, Z. A Soft-Robotic Approach to Anthropomorphic Robotic Hand Dexterity. IEEE Access 2019, 7, 101483–101495.
- Puhlmann, S.; Harris, J.; Brock, O. RBO Hand 3: A platform for soft dexterous manipulation. IEEE Trans. Robot. 2022, 38, 3434–3449.
- Zhang, N.; Zhao, Y.; Gu, G.; Zhu, X. Synergistic control of soft robotic hands for human-like grasp postures. Sci. China Technol. Sci. 2022, 65, 553–568.
- Deimel, R.; Brock, O. A compliant hand based on a novel pneumatic actuator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2047–2053.
- Gilday, K.; Hughes, J.; Iida, F. Sensing, actuating, and interacting through passive body dynamics: A framework for soft robotic hand design. Soft Robot. 2023, 10, 159–173.
- Alves, S.; Babcinschi, M.; Silva, A.; Neto, D.; Fonseca, D.; Neto, P. Integrated design fabrication and control of a bioinspired multimaterial soft robotic hand. Cyborg Bionic Syst. 2023, 4, 0051.
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427.
- Schroeffer, A.; Rehekampff, C.; Lueth, T.C. An Automated Design Approach for Task-Specific two Finger Grippers for Industrial Applications. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 184–189.
- Mohammadi, A.; Lavranos, J.; Zhou, H.; Mutlu, R.; Alici, G.; Tan, Y.; Choong, P.; Oetomo, D. A practical 3D-printed soft robotic prosthetic hand with multi-articulating capabilities. PLoS ONE 2020, 15, e0232766.
- Lai, J.; Song, A.; Shi, K.; Ji, Q.; Lu, Y.; Li, H. Design and evaluation of a bidirectional soft glove for hand rehabilitation-assistance tasks. IEEE Trans. Med. Robot. Bionics 2023, 3, 730–740.
- Parsa, F.F.; Moghadam, A.A.A.; Stollberg, D.; Tekes, A.; Coates, C.; Ashuri, T. A Novel Soft Robotic Hand for Prosthetic Applications. In Proceedings of the 2022 IEEE 19th International Conference on Smart Communities: Improving Quality of Life Using ICT, IoT and AI (HONET), Marietta, GA, USA, 19–21 December 2022; pp. 1–6.
- Ahmed, T.A.-O.; Assad-Uz-Zaman, M.; Islam, M.A.-O.X.; Gottheardt, D.; McGonigle, E.; Brahmi, B.A.-O.; Rahman, M.H. Flexohand: A Hybrid Exoskeleton-Based Novel Hand Rehabilitation Device. Micromachines 2021, 12, 1274.
- Wang, Z.; Hirata, T.; Sato, T.; Mori, T.; Kawakami, M.; Furukawa, H.; Kawamura, S. A soft robotic hand based on bellows actuators for dishwashing automation. IEEE Robot. Autom. Lett. 2021, 6, 2139–2146.
- Milojević, A.; Linß, S.; Handroos, H. Soft Robotic Compliant Two-Finger Gripper Mechanism for Adaptive and Gentle Food Handling. In Proceedings of the 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021; pp. 163–168.
- Mei, D.; Yu, X.; Tang, G.; Liu, S.; Zhao, X.; Zhao, C.; Li, C.; Wang, Y. Blue Hand: A Novel Type of Soft Anthropomorphic Hand Based on Pneumatic Series-Parallel Mechanism. IEEE Robot. Autom. Lett. 2023, 8, 7615–7622.
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF soft robotic hand for dexterous grasping and in-hand manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386.
- Gu, G.; Zhang, N.; Xu, H.; Lin, S.; Yu, Y.; Chai, G.; Ge, L.; Yang, H.; Shao, Q.; Sheng, X. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat. Biomed. Eng. 2023, 7, 589–598.
- Chin, K.; Hellebrekers, T.; Majidi, C. Machine learning for soft robotic sensing and control. Adv. Intell. Syst. 2020, 2, 1900171.
- Khin, P.M.; Low, J.H.; Ang, M.H., Jr.; Yeow, C.H. Development and grasp stability estimation of sensorized soft robotic hand. Front. Robot. AI 2021, 8, 619390.
- Park, J.; Heo, P.; Kim, J.; Na, Y. Qualitative stability analysis of soft hand exoskeleton based on tendon-driven mechanism. Int. J. Precis. Eng. Manuf. 2020, 21, 2095–2104.
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Tian, Y.; Zhang, D. A two-finger soft-robotic gripper with enveloping and pinching grasping modes. IEEE/ASME Trans. Mechatron. 2020, 26, 146–155.
- Zhang, P.; Tang, B. A two-finger soft gripper based on bistable mechanism. IEEE Robot. Autom. Lett. 2022, 7, 11330–11337.
- Zhu, M.; Mori, Y.; Wakayama, T.; Wada, A.; Kawamura, S. A fully multi-material three-dimensional printed soft gripper with variable stiffness for robust grasping. Soft Robot. 2019, 6, 507–519.
- Li, H.; Zhou, P.; Zhang, S.; Yao, J.; Zhao, Y. A high-load bioinspired soft gripper with force booster fingers. Mech. Mach. Theory 2022, 177, 105048.
- Bao, G.; Ma, X.; Luo, X.; Shao, T.F.Z.; Zhang, L.; Yang, Q. Full compliant continuum robotic finger and its kinematic model. Iran. J. Sci. Technology. Trans. Mech. Eng. 2014, 38, 389.
- Yamanaka, Y.; Katagiri, S.; Nabae, H.; Suzumori, K.; Endo, G. Development of a food handling soft robot hand considering a high-speed pick-and-place task. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 87–92.
- Gao, G.; Chang, C.-M.; Gerez, L.; Liarokapis, M. A pneumatically driven, disposable, soft robotic gripper equipped with multi-stage, retractable, telescopic fingers. IEEE Trans. Med. Robot. Bionics 2021, 3, 573–582.
- Thuruthel, T.G.; Abidi, S.H.; Cianchetti, M.; Laschi, C.; Falotico, E. A bistable soft gripper with mechanically embedded sensing and actuation for fast grasping. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Honolulu, HI, USA, 12–15 January 2020; pp. 1049–1054.
- Bullock, I.M.; Ma, R.R.; Dollar, A.M. A hand-centric classification of human and robot dexterous manipulation. IEEE Trans. Haptics 2012, 6, 129–144.
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Inter. J. Robotl Res. 2016, 35, 161–185.
- Li, Y.; Chen, Y.; Ren, T.; Hu, Y.; Liu, H.; Lin, S.; Yang, Y.; Li, Y.; Zhou, J. A dual-mode actuator for soft robotic hand. IEEE Robot. Autom. Lett. 2021, 6, 1144–1151.
- Fras, J.; Althoefer, K. Soft biomimetic prosthetic hand: Design, manufacturing and preliminary examination. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–6.
- Hughes, J.; Maiolino, P.; Iida, F. An anthropomorphic soft skeleton hand exploiting conditional models for piano playing. Sci. Robot. 2018, 3, eaau3098.
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425.
- Andrychowicz, M.; Baker, B.; Chociej, M.; Jozefowicz, R.; McGrew, B.; Pachocki, J.; Petron, A.; Plappert, M.; Powell, G.; Ray, A. Learning dexterous in-hand manipulation. Int. J. Robot. Res. 2020, 39, 3–20.
- Salvietti, G.; Hussain, I.; Malvezzi, M.; Prattichizzo, D. Design of the passive joints of underactuated modular soft hands for fingertip trajectory tracking. IEEE Robot. Autom. Lett. 2017, 2, 2008–2015.
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The grasp taxonomy of human grasp types. IEEE Trans. Hum.-Mach. Syst. 2015, 46, 66–77.
- Salem, M.E.; Wen, R.; Xu, M.H.; Yan, L.; Xiang, M.; Wang, Q. A novel underactuated soft humanoid hand for hand sign language. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–6.
- Li, H.; Ford, C.J.; Bianchi, M.; Catalano, M.G.; Psomopoulou, E.; Lepora, N.F. BRL/Pisa/IIT softhand: A low-cost, 3D-printed, underactuated, tendon-driven hand with soft and adaptive synergies. IEEE Robot. Autom. Lett. 2022, 7, 8745–8751.
- Su, C.; Wang, R.; Lu, T.; Wang, S. SAU-RFC hand: A novel self-adaptive underactuated robot hand with rigid-flexible coupling fingers. Robotica 2023, 41, 511–529.
- Hang, K.; Morgan, A.S.; Dollar, A.M. Pre-grasp sliding manipulation of thin objects using soft, compliant, or underactuated hands. IEEE Robot. Autom. Lett. 2019, 4, 662–669.
- Tan, N.; Gu, X.; Ren, H. Simultaneous robot-world, sensor-tip, and kinematics calibration of an underactuated robotic hand with soft fingers. IEEE Access 2017, 6, 22705–22715.
- Liu, Y.; Xiao, H.; Hao, T.; Pang, D.; Wang, F.; Liu, S. Dexterous all-soft hand (DASH) with active palm: Multi-functional soft hand beyond grasping. Smart Mater. Struct. 2023, 32, 125012.
- Zhou, J.; Li, Y.; Yang, Y.; Cao, H.; Huang, J.; Liu, Y. A 22-DOFs bio-inspired soft hand achieving 6 kinds of in-hand manipulation. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 20–26.
- Hao, T.; Liu, S.; Gu, J. Flexible and stable grasping by multi-jointed pneumatic actuator mimicking the human finger-impacts of structural parameters on performance. Smart Mater. Struct. 2021, 30, 125019.
- Shorthose, O.; Albini, A.; He, L.; Maiolino, P. Design of a 3D-printed soft robotic hand with integrated distributed tactile sensing. IEEE Robot. Autom. Lett. 2022, 7, 3945–3952.
- Wang, H.; Abu-Dakka, F.J.; Le, T.N.; Kyrki, V.; Xu, H. A novel soft robotic hand design with human-inspired soft palm: Achieving a great diversity of grasps. IEEE Robot. Autom. Mag. 2021, 28, 37–49.
- Nanayakkara, V.K.; Cotugno, G.; Vitzilaios, N.; Venetsanos, D.; Nanayakkara, T.; Sahinkaya, M.N. The role of morphology of the thumb in anthropomorphic grasping: A review. Front. Mech. Eng. 2017, 3, 5.
- Yoneda, T.; Morihiro, D.; Ozawa, R. Development of a multifingered robotic hand with the thenar grasp function. Adv. Robot. 2020, 34, 661–673.
- Feix, T.; Pawlik, R.; Schmiedmayer, H.-B.; Romero, J.; Kragic, D. A comprehensive grasp taxonomy. In Proceedings of the Robotics, Science and Systems: Workshop on Understanding the Human Hand for Advancing Robotic Manipulation, Seattle, WA, USA, 28 June–1 July 2009; pp. 2–3.
- Chen, W.; Li, G.; Li, N.; Wang, W.; Yu, P.; Wang, R.; Xue, X.; Zhao, X.; Liu, L. Soft exoskeleton with fully actuated thumb movements for grasping assistance. IEEE Trans. Robot. 2022, 38, 2194–2207.
- Zhou, H.; Mohammadi, A.; Oetomo, D.; Alici, G. A novel monolithic soft robotic thumb for an anthropomorphic prosthetic hand. IEEE Robot. Autom. Lett. 2019, 4, 602–609.
- Chalon, M.; Dietrich, A.; Grebenstein, M. The thumb of the anthropomorphic awiwi hand: From concept to evaluation. Int. J. Humanoid Robot. 2014, 11, 1450019.
- Sangole, A.P.; Levin, M.F. Arches of the hand in reach to grasp. J. Biomech. 2008, 41, 829–837.
- Wang, H.; Xu, H.; Abu-Dakka, F.J.; Kyrki, V.; Yang, C.; Li, X.; Chen, S. A bidirectional soft biomimetic hand driven by water hydraulic for dexterous underwater grasping. IEEE Robot. Autom. Lett. 2022, 7, 2186–2193.
- Pozzi, M.; Malvezzi, M.; Prattichizzo, D.; Salvietti, G. Actuated Palms for Soft Robotic Hands: Review and Perspectives. IEEE/ASME Trans. Mechatron. 2023, 1–11.
- Serrano, D.; Copaci, D.; Arias, J.; Moreno, L.E.; Blanco, D. SMA-Based Soft Exo-Glove. IEEE Robot. Autom. Lett. 2023, 8, 5448–5455.
- Liu, X.; Zhao, Y.; Geng, D.; Chen, S.; Tan, X.; Cao, C. Soft humanoid hands with large grasping force enabled by flexible hybrid pneumatic actuators. Soft Robot. 2021, 8, 175–185.
- Zhang, N.; Ge, L.; Xu, H.; Zhu, X.; Gu, G. 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands. Sens. Actuators A Phys. 2020, 312, 112090.
- Yang, Y.; Chen, Y. Novel design and 3D printing of variable stiffness robotic fingers based on shape memory polymer. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 195–200.
- Bionicsofthand Pneumatic Robot Hand with Artificial Intelligence. 2023. Available online: https://www.festo.com/gb/en/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2018-to-2021/bionicsofthand-id68106/ (accessed on 11 January 2024).
- Curkovic, P.; Cubric, G. Fused Deposition Modelling for 3D printing of Soft Anthropomorphic Actuators. Int. J. Simul. Model. 2021, 20, 12.
- Deng, E.; Tadesse, Y. A soft 3D-printed robotic hand actuated by coiled SMA. Actuators 2020, 10, 6.
- Du, H.; Yao, Y.; Zhou, X. A facile fabricating method for smart soft robotic hand. Polym. Eng. Sci. 2023, 63, 118–125.
- Tavakoli, M.; de Almeida, A.T. Adaptive under-actuated anthropomorphic hand: ISR-SoftHand. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1629–1634.
- Zhang, C.; Li, M.; Chen, Y.; Yang, Z.; He, B.; Li, X.; Xie, J.; Xu, G. An Anthropomorphic Robotic Hand With a Soft-Rigid Hybrid Structure and Positive- Negative Pneumatic Actuation. IEEE Robot. Autom. Lett. 2023, 8, 4346–4353.
- Terryn, S.; Brancart, J.; Lefeber, D.; Assche, G.V.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2, eaan4268.
- Gafford, J.; Ding, Y.; Harris, A.; McKenna, T.; Polygerinos, P.; Holland, D.; Moser, A.; Walsh, C. Shape deposition manufacturing of a soft, atraumatic, deployable surgical grasper. J. Med. Devices 2014, 8, 030927.
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, A.G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170.
- Yamaguchi, A.; Takemura, K.; Yokota, S.; Edamura, K. A robot hand using electro-conjugate fluid. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5923–5928.
- Kim, W.; Seo, B.; Yu, S.Y.; Cho, K.-J. Deployable soft pneumatic networks (d-pneunets) actuator with dual-morphing origami chambers for high-compactness. IEEE Robot. Autom. Lett. 2021, 7, 1262–1269.
- Luo, Y.; Zou, J.; Gu, G. Multimaterial pneumatic soft actuators and robots through a planar laser cutting and stacking approach. Adv. Intell. Syst. 2021, 3, 2000257.
- Kim, Y.-J.; Yoon, J.; Sim, Y.-W. Fluid lubricated dexterous finger mechanism for human-like impact absorbing capability. IEEE Robot. Autom. Lett. 2019, 4, 3971–3978.
- Yap, H.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.-H. Design of a soft robotic glove for hand rehabilitation of stroke patients with clenched fist deformity using inflatable plastic actuators. J. Med. Devices 2016, 10, 044504.
- Scharff, R.B.; Doubrovski, E.L.; Poelman, W.A.; Jonker, P.P.; Wang, C.C.; Geraedts, J.M. Towards behavior design of a 3D-printed soft robotic hand. In Proceedings of the Soft Robotics: Trends, Applications and Challenges: Proceedings of the Soft Robotics Week, Livorno, Italy, 25–30 April 2016; pp. 23–29.
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33.
- Jain, S.; Dontu, S.; Teoh, J.E.M.; Alvarado, P.V.Y. A Multimodal, Reconfigurable Workspace Soft Gripper for Advanced Grasping Tasks. Soft Robot. 2023, 10, 527–544.
- Abondance, S.; Teeple, C.B.; Wood, R.J. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509.
- Fei, Y.; Wang, J.; Pang, W. A novel fabric-based versatile and stiffness-tunable soft gripper integrating soft pneumatic fingers and wrist. Soft Robot. 2019, 6, 1–20.
- Ren, T.; Li, Y.; Liu, Q.; Chen, Y.; Yang, S.X.; Yuan, H.; Li, Y.; Yang, Y. Novel Bionic Soft Robotic Hand With Dexterous Deformation and Reliable Grasping. IEEE Trans. Instrum. Meas. 2023, 72, 1–10.
- Chen, C.; Sun, J.; Wang, L.; Chen, G.; Xu, M.; Ni, J.; Ramli, R.; Su, S.; Chu, C. Pneumatic bionic hand with rigid-flexible coupling structure. Materials 2022, 15, 1358.
- Li, Y.; Wei, Y.; Yang, Y.; Chen, Y. A novel versatile robotic palm inspired by human hand. Eng. Res. Express 2019, 1, 015008.
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive particle jamming and its stiffening of soft robotic grippers. IEEE Trans. Robot. 2017, 33, 446–455.
- Lee, J.; Kim, J.; Park, S.; Hwang, D.; Yang, S. Soft robotic palm with tunable stiffness using dual-layered particle jamming mechanism. IEEE/ASME Trans. Mechatron. 2021, 26, 1820–1827.
- Choi, W.H.; Kim, S.; Lee, D.; Shin, D. Soft, multi-DoF, variable stiffness mechanism using layer jamming for wearable robots. IEEE Robot. Autom. Lett. 2019, 4, 2539–2546.
- In, H.; Kang, B.B.; Sin, M.; Cho, K.-J. Exo-glove: A wearable robot for the hand with a soft tendon routing system. IEEE Robot. Autom. Mag. 2015, 22, 97–105.
- Sun, Y.; Song, Y.S.; Paik, J. Characterization of silicone rubber based soft pneumatic actuators. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4446–4453.
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85.
- Rodrigue, H.; Wang, W.; Han, M.-W.; Kim, T.J.; Ahn, S.-H. An overview of shape memory alloy-coupled actuators and robots. Soft Robot. 2017, 4, 3–15.
- Zhang, Y.F.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-response, stiffness-tunable soft actuator by hybrid multimaterial 3D printing. Adv. Funct. Mater. 2019, 29, 1806698.
- Tang, Y.; Chi, Y.; Sun, J.; Huang, T.H.; Yin, J. Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots. Sci. Adv. 2020, 6, eaaz6912.
- Han, H.-Y.; Shimada, A.; Kawamura, S. Analysis of friction on human fingers and design of artificial fingers. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3061–3066.
- Takahashi, A.; Yamaguchi, A.; Nonomura, Y. Friction between Two Finger Models: Effects of Fingerprints on Friction Dynamics. Chem. Lett. 2014, 43, 1899–1900.
- Alben, S.; Witt, C.; Baker, T.V.; Anderson, E.; Lauder, G.V. Dynamics of freely swimming flexible foils. Phys. Fluids 2012, 24, 051901.
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87.
- Hao, Y.; Biswas, S.; Hawkes, E.W.; Wang, T.; Zhu, M.; Wen, L.; Visell, Y. A multimodal, enveloping soft gripper: Shape conformation, bioinspired adhesion, and expansion-driven suction. IEEE Trans. Robot. 2020, 37, 350–362.
- Seibel, A.; Yıldız, M.; Zorlubaş, B. A gecko-inspired soft passive gripper. Biomimetics 2020, 5, 12.
- Hao, T.; Xiao, H.; Liu, S.; Liu, Y. Fingerprint-inspired surface texture for the enhanced tip pinch performance of a soft robotic hand in lubricated conditions. Friction 2023, 11, 1349–1358.
- Hao, T.; Xiao, H.; Liu, Y.; Pang, D.; Liu, S. Gripping performance of soft grippers with fingerprint-like surface texture for objects with slippery surfaces. Tribol. Int. 2023, 189, 108992.
More
Information
Subjects:
Engineering, Mechanical
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
827
Revisions:
2 times
(View History)
Update Date:
06 Mar 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No