Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Miguel-Ángel Fas-Millán | -- | 2424 | 2024-02-29 17:20:33 | | | |
| 2 | Rita Xu | -58 word(s) | 2366 | 2024-03-01 03:02:02 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Fas-Millán, M.; Pick, A.; Río, D.G.D.; Tineo, A.P.; García, R.G. Implementing and Testing a U-Space System. Encyclopedia. Available online: https://encyclopedia.pub/entry/55747 (accessed on 11 June 2026).
Fas-Millán M, Pick A, Río DGD, Tineo AP, García RG. Implementing and Testing a U-Space System. Encyclopedia. Available at: https://encyclopedia.pub/entry/55747. Accessed June 11, 2026.
Fas-Millán, Miguel-Ángel, Andreas Pick, Daniel González Del Río, Alejandro Paniagua Tineo, Rubén García García. "Implementing and Testing a U-Space System" Encyclopedia, https://encyclopedia.pub/entry/55747 (accessed June 11, 2026).
Fas-Millán, M., Pick, A., Río, D.G.D., Tineo, A.P., & García, R.G. (2024, February 29). Implementing and Testing a U-Space System. In Encyclopedia. https://encyclopedia.pub/entry/55747
Fas-Millán, Miguel-Ángel, et al. "Implementing and Testing a U-Space System." Encyclopedia. Web. 29 February, 2024.
Copy Citation
One of the main goals of the Labyrinth project was to develop and test the path planning algorithms that supported the conflict resolution services of a U-space-based Unmanned Traffic Management (UTM) system. To test these services in real scenarios, a UTM prototype was developed. The U-space concept of operations (ConOps) provides a high-level description of the architecture, requirements and functionalities of these systems, but the implementer has a certain degree of freedom in aspects like the techniques used or some policies and procedures.
U-space
UAV
UAS
RPAS
drone
1. Background
A safe use of drones sharing the airspace, same as with crewed aviation, requires a management of the separation. This separation cannot always rely on the skills of the pilots, since many of the operations are expected to be beyond the visual line of sight (BVLOS), with pilots having limited information of the airspace and context. Moreover, the use of human air traffic controllers does not fit well with the particularities of the small drones and the city environment. A better option is to automate an Unmanned Traffic Management (UTM) system. To harmonize such UTM systems in Europe, under the European Union’s (EU) Horizon 2020 research and innovation program, the project CORUS (Concept of Operations for EuRopean UTM Systems) developed and published the U-space concept of operations (ConOps), which would be regulated and adopted in April 2021 as the EU’s UTM ConOps, entering into force on January 2023. The constant research and projects focused on developing and implementing different aspects in the ConOps since the first version was published, have contributed to its refinement, extension and improvement and today version 4 is available [1], addressing new topics like Urban Air Mobility (UAM).
U-space does not only address drone traffic management, but also other relevant aspects like safety, privacy, security, social acceptance or co-existence of all Very Low-Level airspace operations, and its architecture is aimed at facilitating the proliferation of an entire industry around the offer of services provided by and for unmanned aerial vehicles (UAVs). This is permitted by its modular architectural design, which can be seen as a system of systems. Part of these systems are called services, and represent specialized functionalities like calculations or data provision. Services can be dependent on or could make use of other services. For a single U-space, the services can be provided by different companies or institutions and therefore run in different infrastructures; hence, the need for the harmonization for a compatible market.
2. Implementing and Testing a U-Space System
Four phases have been defined for the implementation of U-space, each of them adding more services to allow for more complex operations. Behind this complexity, there is a more efficient and flexible use of the airspace, able to better satisfy the needs of the airspace users in different aspects. Several recent and current projects have been oriented to develop some of those envisioned services or sub-services. An example is the DACUS (Demand and Capacity Optimization for U-Space) project [2], developing a Dynamic Capacity Management service. With a duration of two years and a half, DACUS suggested a flight plan definition reflecting, on the one hand, the expected uncertainties to comply with the flight plan, which could be determined by factors like weather, communication, navigation and surveillance (CNS) accuracy or the availability of infrastructures like vertiports. And on the other hand, reflecting details of the drone and the trajectory, making it possible to determine the level of annoyance (noise, visual impact) when flying over population and the risk associated, this last value based on the data provided by a Population Density Map service. With all these inputs, DACUS determined, for a given set of flight plans, the hotspots, or areas where the risk of collision or the threshold of annoyance was exceeded, and measures like changes in altitude or delays were suggested in each case to avoid such hotspots. Therefore, DACUS was not providing deconfliction, but the analysis of considerations that, coordinated with the separation services, would bring us closer to a system capable of providing an accepted, safe, efficient and feasible traffic management. The topic of the Dynamic Capacity Management in U-space is also addressed in [3], where a safety condition is required in the management of the traffic density: the aircraft must remain within the range of a landing point along all of its route in case some failure or contingency forces it to land.
Other services that should be in place for a successful deployment cover more technical aspects. The ICARUS project (Integrated Common Altitude Reference system for U-Space) [4] suggested four new services that were later added to edition 4 of the ConOps: Vertical Conversion service, GNSS service, Real-time Geographic Information service and Vertical Alert service. ICARUS proposed that authorities could determine a specific altitude reference in areas where there is a risk of altitude confusion. The importance of a service like this and the coordination of the altitude references was noted during the development of the work described in the present document, as will be later explained.
A key piece and an input for several services is the configuration of the airspace. Researchers should expect to find the airspace divided into different volumes associated to a diversity of constraints, like speed or altitude to mitigate the noise, layers where only drones with certain capabilities would be allowed to fly or areas dedicated to Urban Air Mobility (UAM). If the use of the airspace is to be optimized, this segmentation will probably be dynamic, and a service like the Drone Aeronautical Information Management Service will have to inform of the changes in the structure of the airspace to the airspace users and to the rest of the U-space services affected. The exploratory project USEPE [5] proposed criteria for these subdivisions together with machine learning algorithms to determine in each volume the separation between drones and from manned aviation [6].
One of the most important tasks of the system will be the contingency management. As detailed in [7], its consideration ramifies throughout the entire system and affects all stakeholders. Safety being the main principle to guide the operations, it will affect other features like flight optimization, preferences or priorities. In [8], a method is proposed to evaluate the risk of the operations and suggest measures to the path planning algorithms to mitigate the risk.
Some operations will require specific services and considerations. This is the case of UAM. As a result of the project CORUS-XUAM [9], the last version of the ConOps now includes a Vertiport Availability service. Such service should be based on an analysis of the capacity and demand for a forecast of the availability. This analysis can also support the design of the future vertiports or their expansion. All this and more was the task of the project HorizonUAM; find in [10] the long relation of publications which resulted from this project.
The services mentioned are a small part of all those identified in the ConOps. Some of them are expected from a given implementation phase and some are required only in certain types of airspace volumes. In any case, once having the necessary services with an adequate performance, they have to be coordinated. A harmonized information and communication exchange is necessary to facilitate the compatibility and the competitiveness of the services provided by the U-space service providers (USSPs). Procedures for this coordination need to be described in detail. Criteria will have to be defined to assign the airspace to the users. Policies will have to be set to manage the traffic. Rules need to be established for both the system and the users to respond to contingencies. Defining most of this is the goal of the ongoing project AI4HyDrop (An AI-based Holistic Dynamic Framework for a safe Drone’s Operations in restricted and urban areas) [11]. This project will develop a framework to coordinate the services implied in the submission of a flight plan request and its acceptance. The artificial intelligence (AI) in the project will be found in services like the one creating wind and turbulence models to predict micro-scale effects in the urban architecture; also in the one that will use AI techniques to detect rogue drones; and finally, the Flight Authorization service will make use of AI, for instance, for the strategic deconfliction.
3. The Scope of Labyrinth
The present work was part of the project Labyrinth [12][13], a three-year Horizon 2020 project ending in May 2023. Its main goal was to develop and test the algorithms behind two of the key U-space services: Strategic Conflict Resolution and Tactical Conflict Resolution. The Robotics Lab research group at the University Carlos III of Madrid (UC3M) developed the algorithms to find a feasible path, which was returned as a four-dimensional (4D) trajectory. The details of these algorithms have already been described in other articles [14][15][16][17][18][19][20][21], where their potential can be better discovered, since only part of their possibilities was used in the real flights during the project. The task of the algorithms was to provide the drone operators with a deconflicted trajectory based on their flight intentions, capabilities and some existing constraints:
-
Trajectories of other traffic. The occupancy of the airspace considered the time dimension, i.e., if at a given time t the drone is expected to overfly the waypoint n, the airspace left behind, the [0, n − 1] waypoints, is considered available for other traffic.
-
Geo-fences.
-
Elevation map including buildings.
-
Maximum and minimum speed of the aircraft.
-
VTOL/fixed-wing capabilities regarding turns and take-off/landing maneuvers.
These constrains that UC3M’s algorithms took as input were just part of all the constraints that a system like this should consider, especially if used for relevant traffic densities flying over population. But to develop a strategic or tactical deconfliction service able to integrate more factors researchers first need services providing such sources of information. Most of those services do not exist yet and would deserve their own project to be developed due to their complexity. As an example, the case of the elevation data used during the project. There were used the Digital Surface Models (DSMs) based on LiDAR (Laser Imaging Detection and Ranging) point clouds available in the web of the Spanish National Geographic Institute. The algorithms used in the path planner had a high computational demand, being limited in the size of the area or work, which had to be previously cut from the DSMs and converted, which is not a quick step. As a result, the tests during the project were limited to some specific areas in Spain and Italy (Figure 1). This is not an option for a service that had to be used in a wide area containing at least a city and its surroundings, or connecting two cities. Moreover, while the resolution of the LiDAR samples was acceptable (5 m), the datasets available were slightly aged ([2009,20,012] depending on the sheet), which means that some buildings or vegetation was not reflected in the data. In one of the flight tests later described, it can be seen that the trajectory finally flown had more altitude than that approved by the UTM; the reason was a group of tall trees, which probably were not there or not that high when the dataset was captured; then, the altitude of the approved plan was increased to avoid risks. For a safe and efficient deconfliction service, researchers would need a service able to rapidly provide specific pieces of recent elevation maps. This is just an example of the many potential business models that U-space allows.
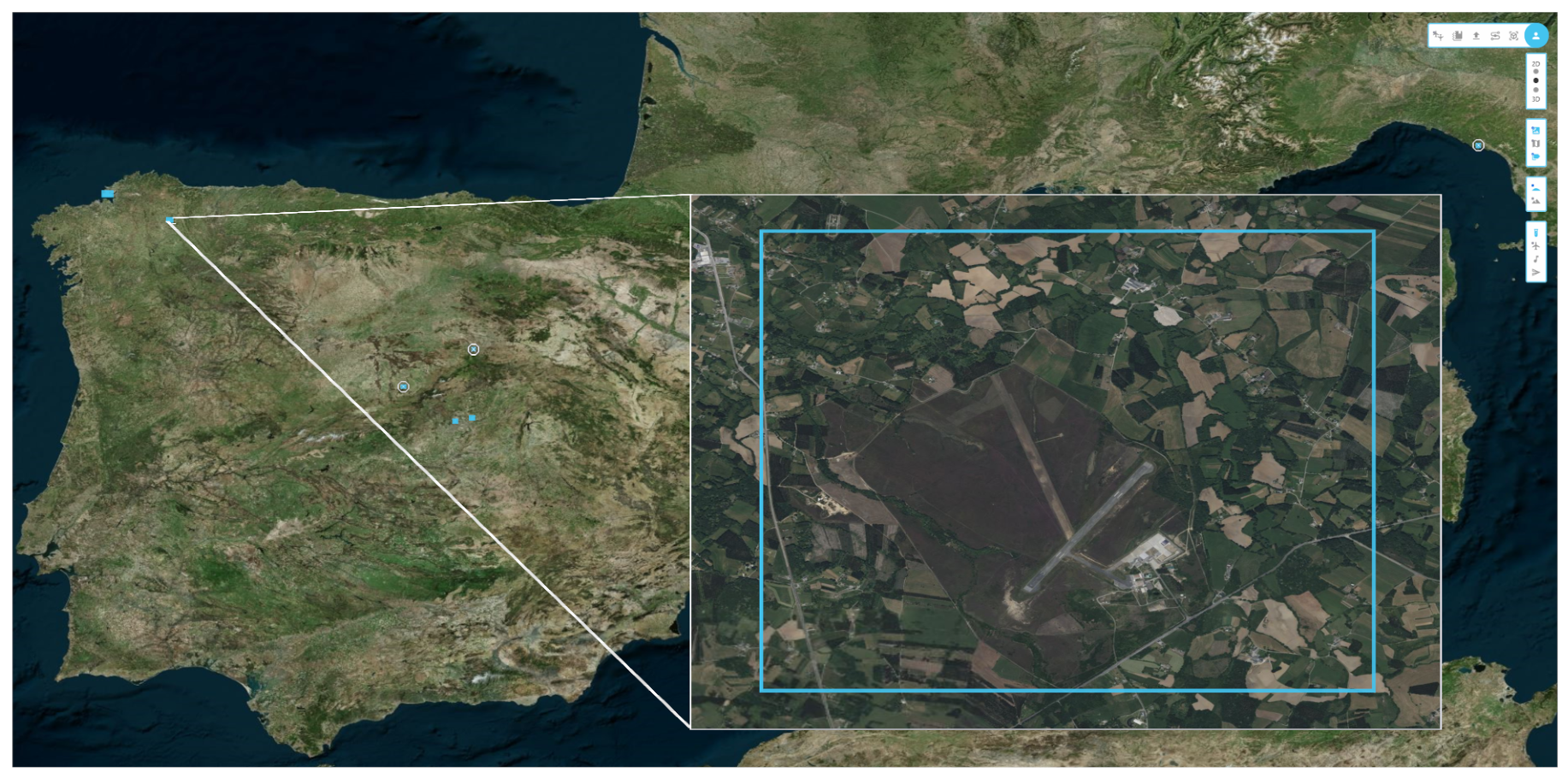
Figure 1. Web app UTM interface. Blue squares frame the areas of work of the path planner.
UC3M’s algorithms, in the same way as in the approach of [22], follow a First-Come, First-Served assignment of the airspace. But it would be more convenient to have flights with priorities to support missions like police tasks or medical services. In this case, the submission of a flight plan could mean modifying other scheduled or ongoing flights. But priorities could be associated to criteria like penalties or reputation points in case the authorities decide to motivate the good practices of the airspace users; priorities could be also just a matter of price. In any of these cases, one service should exist to provide the conflict resolution services with the priority of the flight in the deconfliction decision.
The complexity to develop any of the mentioned U-space services, policies or procedures together with their coordination explains why the services implemented in Labyrinth only had the intention to provide a basic functionality. However, it was enough for the exercises to be executed, which were performed in empty environments without people at risk, very low possibility of collision with buildings or infrastructure and a maximum of three drones flying at the same time in the area. Researchers cannot claim that they were implementing a complete Strategic Conflict Resolution or a Tactical Conflict Resolution service since researchers were lacking many of the inputs required to achieve, for example, the coordination with manned air traffic control. Instead, the main interest behind the experiments described here was addressed to verify how well the process of design and request for approval of the flight plans could satisfy the needs of the final users and detect any need that could not be identified just running simulations without humans-in-the-loop. The flights supported the activities of final users willing to integrate drones into their tasks to increase efficiency. The use cases included: bird shepherding, runway inspection in airports, sanitary supplies delivery, evaluation of an emergency area, support for the evacuation of a mass of people, monitoring of loading activities and surveillance in maritime ports, infraction detection of car drivers and speed measurement of ground traffic. But another interesting source of feedback came from the work of the operators to integrate their platforms. They had to modify their ground control stations (GCSs) to log in the system, receive and load in the drone the flight plan approved, report the position during the flight and receive instructions and information.
DLR was responsible for implementing the services, connecting with UC3M’s path planning sub-service. The Spanish partners Arquimea and the National Institute of Aerospace Technology (INTA) would be in charge of testing the system by adapting their platforms and executing real flights that reflected the needs of different final users involved in the project.
References
- CORUS-XUAM Project 2023 U-Space ConOps 4th Edition SESAR. Available online: https://www.sesarju.eu/node/4544 (accessed on 9 December 2023).
- DACUS Project. Available online: https://dacus-research.eu (accessed on 23 February 2024).
- Tang, Y.; Xu, Y.; Inalhan, G. An Integrated Approach for On-Demand Dynamic Capacity Management Service in U-Space. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4180–4195.
- Integrated Common Altitude Reference System for U-Space (ICARUS) Project 2020–2022. EU Horizon 2020 Research and Innovation Program. Available online: https://www.u-spaceicarus.eu (accessed on 23 February 2024).
- USEPE Project. Available online: https://usepe.eu (accessed on 23 February 2024).
- Arntzen, A.A.; Cabañas, E.N.; Güldal, S.; Dahle, O.H.; Bueno, J.; Dullweber, M.; Giersch, S.; Coyne, M.A. Model for a Safer Drone’s Operation in an Urban Environment. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS) 2022, Dubrovnik, Croatia, 21–24 June 2022.
- Altun, A.T.; Xu, Y.; Inalhan, G.; Vidal-Franco, I.; Hardt, M. Contingency management concept generation for U-space system. In Proceedings of the Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022.
- Su, Y.; Xu, Y.; Inalhan, G. A comprehensive flight plan risk assessment and optimization method considering air and ground risk of UAM. In Proceedings of the IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–10.
- CORUS-XUAM Project. Available online: https://corus-xuam.eu (accessed on 23 February 2024).
- Publications of the HorizonUAM Project. Available online: https://www.dlr.de/fl/en/desktopdefault.aspx/tabid-18246/29007_read-76340 (accessed on 23 February 2024).
- AI4HyDrop Project. Available online: https://ai4hydrop.eu (accessed on 23 February 2024).
- Labyrinth Project. Available online: https://labyrinth2020.eu (accessed on 23 February 2024).
- CORDIS Unmanned Traffic Management 4D Path Planning Technologies for Drone Swarm to Enhance Safety and Security in Transport (Labyrinth) 2020–2023. Available online: https://cordis.europa.eu/project/id/861696 (accessed on 23 February 2024).
- López, B.; Muñoz, J.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors 2021, 21, 4414.
- Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Multi UAV Coverage Path Planning in Urban Environments. Sensors 2021, 21, 7365.
- Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Coverage Strategy for Target Location in Marine Environments Using Fixed-Wing UAVs. Drones 2021, 5, 120.
- Monje, C.A.; Garrido, S.; Moreno, L.E.; Balaguer, C. UAVs Formation Approach Using Fast Marching Square Methods. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 36–46.
- Gonzalez, V.; Monje, C.A.; Garrido, S.; Moreno, L.E.; Balaguer, C. Coverage Mission for UAVs Using Differential Evolution and Fast Marching Square Methods. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 18–29.
- Garrido, S.; Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Moreno, L.E. FM2 Path Planner for UAV Applications with Curvature Constraints: A Comparative Analysis with Other Planning Approaches. Sensors 2022, 22, 3174.
- Garrido, S.; Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Moreno, L.E. Fast Marching Techniques for Teaming UAV’s Applications in Complex Terrain. Drones 2023, 7, 84.
- Muñoz, J.; López, B.; Quevedo, F.; Garrido, S.; Monje, C.A.; Moreno, L.E. Gaussian processes and Fast Marching Square based informative path planning. Eng. Appl. Artif. Intell. 2023, 121, 106054.
- Tang, Y.; Xu, Y.; Inalhan, G. Incorporating Optimisation in Strategic Conflict Resolution Service in U-space. In Proceedings of the 11th SESAR Innovation Days, Virtual Event, 7–9 December 2021.
More
Information
Subjects:
Engineering, Aerospace
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
775
Revisions:
2 times
(View History)
Update Date:
01 Mar 2024
Table of Contents




Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No