Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Lionel Nkenyereye | -- | 5494 | 2024-01-31 09:54:39 | | | |
| 2 | Jessie Wu | + 14 word(s) | 5508 | 2024-02-01 02:28:12 | | | | |
| 3 | Jessie Wu | + 2 word(s) | 5510 | 2024-02-01 02:29:45 | | | | |
| 4 | Jessie Wu | + 3 word(s) | 5513 | 2024-02-01 02:31:04 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Nkenyereye, L.; Nkenyereye, L.; Ndibanje, B. Underwater 5G-Based Networks. Encyclopedia. Available online: https://encyclopedia.pub/entry/54574 (accessed on 24 June 2026).
Nkenyereye L, Nkenyereye L, Ndibanje B. Underwater 5G-Based Networks. Encyclopedia. Available at: https://encyclopedia.pub/entry/54574. Accessed June 24, 2026.
Nkenyereye, Lewis, Lionel Nkenyereye, Bruce Ndibanje. "Underwater 5G-Based Networks" Encyclopedia, https://encyclopedia.pub/entry/54574 (accessed June 24, 2026).
Nkenyereye, L., Nkenyereye, L., & Ndibanje, B. (2024, January 31). Underwater 5G-Based Networks. In Encyclopedia. https://encyclopedia.pub/entry/54574
Nkenyereye, Lewis, et al. "Underwater 5G-Based Networks." Encyclopedia. Web. 31 January, 2024.
Copy Citation
The term “Internet of Underwater Things (IoUT)” refers to a network of intelligent interconnected underwater devices designed to monitor various underwater activities. The IoUT allows for a network of autonomous underwater vehicles (AUVs) to communicate with each other, sense their surroundings, collect data, and transmit them to control centers on the surface at typical Internet speeds. These data serve as a valuable resource for various tasks, including conducting crash surveys, discovering shipwrecks, detecting early signs of tsunamis, monitoring animal health, obtaining real-time aquatic information, and conducting archaeological expeditions.
Internet of Underwater Things (IoUT)
monitoring various underwater activities
simulation tools for underwater networks
1. Introduction
Implementing 5G technology in underwater wireless sensor networks (UWSNs) signifies a significant advancement in underwater communication capabilities. This integration brings about enhanced data rates, lower latency, and improved overall performance in underwater sensor networks.
The surveyed underwater techniques were found to come from six different categories with varying characteristics regarding 5G networks and simulation tools used for evaluation performance. The majority of the works examined propose algorithms that fit into one of the following six categories.
2. Underwater Wireless Sensor Networks
UWSNs are specialized networks designed for communication and data exchange among underwater sensor nodes. These networks are used for various applications, including environmental monitoring, underwater exploration, disaster prevention, and military surveillance. Table 1 lists work on UWSNs with 5G and simulation tools for evaluation.
Table 1. Summary of UWSNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Aspect |
|---|---|---|---|---|
| [1] | Routing solution for energy and QoS efficient | Effective Fitness Function-based Particle Swarm Optimization (EFF-PSO) | Aqua Sim | High data rate |
| [2] | Monitor and record the physical and environmental parameters | Waypoint mobility protocol for CBR and VBR | QualNet7.1 | Low latency |
| [3] | Security and intrusion detection | Security scheme and vector-based forward routing protocol | Ns-2 AquaSim | Security improvement |
| [4] | Energy and prolong life time of UWSNs | Energy-efficient protocol for UWSNs (EE-UWSNs) protocol | UAVNetSim | Higher data rate |
| [5] | Node deployment and relay optimization | Cooperative-Relay Neighboring-Based Energy-Efficient Routing | MatLab | Enhanced Connectivity |
| [6] | Higher utilization and data transmission | The source-tree adaptive routing-least overhead routing approach (STAR-LORA) protocol |
QualNet7.1 | Higher data and enhanced connectivity |
| [7] | Service provisioning with network function virtualization |
Non-bursty and bursty type of traffic of UWSN through virtual network function nodes | MatLab | Reliability and resource efficiency |
| [8] | Prediction of natural disasters; marine environment; and monitoring aquatic life | Various modes of communication, architectures, and protocol layers involved in underwater communication | N/A | Higher data rate |
Gavali et al. [1] proposed a protocol involving the use of an effective fitness function-based particle swarm optimization (EFF-PSO) algorithm to strategically select the optimal forwarder node responsible for UWSN data delivery. In the protocol, the intended source node identifies forwarding relay nodes based on location information. Subsequently, the EFF-PSO algorithm is employed to choose the optimal relay node, considering a comprehensive set of parameters. It provides the high data rate required for the 5G aspect. The simulation was conducted using AquaSim.
Sathish et al. [2] presented analyzing performance parameters for UWSNs. Their study explores various performance parameters within a random waypoint mobility model by adjusting the maximum speed of a node and modifying the number of nodes in the mode. The examined parameters encompass average transmission delay; average jitter; average path loss; percentage of utilization; and energy consumption in transmit, receive, and idle modes. Their work would enhance low latency as a key aspect of 5G network. They use QualNet 7.1 simulator for evaluation.
Soumadeep et al. [3] introduce an adaptive decentralized intrusion detection and prevention system, referred to as AIDPS. AIDPS aims to enhance the security of UWANs by effectively detecting underwater-related attacks such as blackhole, grayhole, and flooding attacks.
Alablani et al. [4] introduce a novel MAC/routing protocol for UWSNs named the energy-efficient protocol for UWSNs (EE-UWSNs). The protocol is founded on five key principles to conserve sensor energy and prolong UWSNs’ lifespan. These principles involve utilizing finite power levels, implementing multi-hop transmission, restricting the transmission scope, employing an inactivation mode, and ensuring energy consumption balance. The simulations were conducted with the AUVNetSim simulator. It is a Python project developed by the Massachusetts Institute of Technology (MIT).
Hussain et al. [5] proposed an approach that focuses specifically on cooperation and relay optimization schemes, presenting an extension of the Neighboring-Based Energy-Efficient Routing (NBEER) protocol. Performance evaluation considers path loss, end-to-end delay, packet delivery ratio, and energy consumption.
Sathish et al. [6] focus on the analysis of UWSN performance, comparing various routing protocols. They proposed the source-tree adaptive routing-least overhead Routing over LoRa (STAR-LoRa) approach. The simulation results show that STAR-LORA demonstrates an 85.3% lower jitter than conventional routing protocols, emphasizing its efficiency in minimizing transmission delays. Interestingly, the fisheye routing protocol achieves a 91.4% higher utilization percentage than its counterparts, highlighting its efficacy in optimizing network resources. The results obtained using the QualNet 7.1 simulator underscore the suitability of these routing protocols in UWSN applications.
Subash et al. [7] implement a model that enables dynamic provisioning of resources through the concept of network function virtualization (NFV). The traffic modeling follows both non-bursty and bursty types of traffic in UWSN. The current resource availability of virtual network function nodes with the multi-level traffic intricate NFV chain in UWSN is estimated by leveraging both the leftover service property and convolution associativity property.
Deivasigamani et al. [8] delve into various communication modes, architectures, and protocol layers relevant to underwater communication. Additionally, they establish an underwater hybrid connection through opto-acoustic signals, providing an overview of different performance characteristics, channel behaviors, and challenges encountered in underwater scenarios.
Overall, developing reliable and energy-efficient communication protocols and robust underwater sensor nodes is crucial for successfully deploying and operating UWSNs. Some challenges are listed:
-
Limited Bandwidth: Underwater communication faces challenges due to the limited bandwidth of acoustic signals, which are the primary means of communication underwater.
-
High Propagation Delay: Signals travel slower underwater compared to in the air, leading to higher propagation delays.
-
Multipath Propagation: Underwater channels often exhibit multipath propagation, where signals take multiple paths to reach the destination.
Pourkabirian et al. [9] proposed a concept that involves collecting received signal strength (RSS) observations and estimating the angle of arrival (AoA) based on error variance. Realistic deployment assumes the assumption that noise information is not available. Consequently, a min–max approach is presented to optimize worst-case performance and enhance estimation accuracy under unknown parameters. The proposed estimator’s mismatch is also analyzed using mean-square error (MSE).
Diwan et al. [10] develop an approach that employs a multi-dimensional method to present use cases for IoUT in the marine and undersea objects domain. The work showcases significant applications and real-world domains interfacing with essential IoUT components. The proposed approach adopts a multi-hop and metaheuristic-based strategy to enhance IoUT’s effectiveness and overall performance.
Pei et al. [11] explore the application of Fed-IoUT in various fields, encompassing water quality monitoring, underwater life detection, flood forecasting, underwater detection, and marine energy transfer. Additionally, they discuss the current development limitations and provide a comprehensive outlook for the future.
Omeke et al. [12] provide profound importance to the ocean, which has spurred the application of AI ML tools to foster a sustainable marine ecosystem. Their review provides a concise overview of the reinforcement learning (RL) paradigm, its classifications, and the development of RL algorithms designed to address crucial challenges in IoUTs. New literature continually showcases innovative applications of RL in underwater communications and networking that surpass conventional solutions and other ML-based methods. RL’s online learning nature benefits decision-making in dynamic environments like underwater scenarios.
Yan et al. [13] introduce a Hybrid G-STAR (H-G-STAR) routing protocol that builds upon the strengths of G-STAR while being specifically adapted to the unique underwater conditions. Various degrading factors within underwater channels significantly constrain the performance of the G-STAR protocol.
Zainab et al. [14] discussed methodologies required for resource-efficient and distributed cross-domain data fusion. They proposed distributed neural networks to compute data analytics pipelines for resource efficiency, extracting highly aggregated patterns of interest from raw data. These aggregated patterns will serve as a common base in time and space for the fusion of heterogeneous data.
3. Internet of Underwater Things
The IoUT holds great potential for advancing our understanding of the underwater world. Table 2 lists work on IoUTs with 5G and simulation tools for evaluation.
Table 2. Summary of IoUTs with 5G and simulation tools for evaluation.
| Ref. | Application/Issue | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [9] | Localization | Semidefinite programming (SDP)-based method | MatLab | Remote management and control |
| [10] | Ocean-based environment, which is impacted by the ocean’s temperature | The proposed approach is making use of a multi-hop and metaheuristic-based approach for the effectiveness and overall performance of IoUT | MatLab | Massive device connectivity |
| [11] | Data privacy protection, low communication overhead | Water quality monitoring, underwater life detection, flood forecasting, underwater detection, and marine energy transfer | N/A | Security, remote management, and control |
| [12] | ML to create sustainable marine ecosystem | The applications of RL in IoUTs | N/A | Low latency, reliability, and robustness |
| [13] | Geographical routing protocol | A Hybrid G-STAR (H-G-STAR) routing protocol | MatLab | Enhanced data rate, massive device connectivity |
| [14] | Resource efficiency | Distributed neural networks as data-analytics pipelines | MatLab | Network slicing, reliability, and robustness |
| [15] | The energy efficiency with IRS -enabled network |
IRS-assisted energy constrained 6G wireless networks | MatLab | Reliability and robustness, energy efficiency |
| [16] | Network clustering approach | Uniform distribution of CHs based on artificial bee colony | N/A | Enhanced data rate, low latency |
Taneja et al. [15] discussed monitoring Industry 5.0 requirements at remote levels that introduce additional communication challenges in UWSNs. The utilization of relays in 6G wireless networks is restricted due to high energy demands. Consequently, their work explores Intelligent Reflecting Surfaces (IRSs) as a solution for energy-constrained 6G wireless networks to establish a seamless connection among communicating mobile nodes. The system incorporates an IRS equipped with an array of reflecting elements. They also present a use-case scenario illustrating the application of an IRS-enabled network in IoUT for smart ocean transportation. Sayed et al. [16] introduce an efficient clustering scheme that judiciously selects the best cluster heads (CHs) using a combination of the artificial bee colony (ABC) and Q-learning optimization approaches. The proposed scheme facilitates the effective selection of CHs based on four critical factors: residual energy level, depth, distance from the base station, and signal quality. The evaluation begins by assessing various swarm algorithms, including genetic algorithm (GA), particle swarm optimization (PSO), ant colony optimization (ACO), and ABC, to determine the most suitable one for improving the CH selection mechanism.
The IoUTs address various underwater exploration and monitoring challenges. As technology continues to advance, IoUT is likely to play an increasingly important role in scientific, industrial, and environmental applications to address some of the challenges:
-
Communication Range and Reliability: Underwater communication faces limited range, signal attenuation, and multipath propagation challenges.
-
Energy Efficiency: Many underwater devices operate on limited power, so energy-efficient communication and sensing technologies are crucial.
-
Localization: Accurate localization of devices is challenging underwater due to the absence of GPS signals, requiring acoustic or other localization methods.
-
Data Security: Ensuring the security and integrity of data transmitted in underwater networks is a significant concern.
4. Unmanned Underwater Vehicle (UUV) Networks
UUV Networks involve deploying and coordinating multiple AUVs to perform various tasks, including data collection, surveillance, exploration, and environmental monitoring.
Types of Unmanned Underwater Vehicle
-
AUVs are self-propelled vehicles capable of independent navigation and data collection. AUVs are often used for scientific research, oceanographic studies, and underwater mapping.
-
Remotely Operated Vehicles (ROVs): Unlike AUVs, ROVs are typically tethered to a surface vessel and are operated remotely by human operators. They are commonly used for tasks that require dexterous manipulation or realtime control. UUVs in a network often share information about their position, status, and sensor data to navigate and achieve mission objectives collaboratively.
Collaborative navigation may involve techniques such as cooperative localization, where vehicles use each other’s positions to improve accuracy. Mission Planning and Coordination have the following challenges:
-
UUV networks require sophisticated mission planning algorithms to optimize the deployment of vehicles and achieve mission objectives efficiently.
-
Coordination mechanisms ensure that UUVs can work together to cover a large area, avoid collisions, and adapt to changing environmental conditions.
Unmanned Underwater Vehicle Networks have the potential to revolutionize our ability to explore and understand the underwater world, providing valuable data for scientific research, environmental monitoring, and various industrial applications. As technology advances, the capabilities of UUV networks are likely to expand, opening up new possibilities for underwater exploration and resource management.
Nomikos et al. [17] explore the state-of-the-art in AUV-aided maritime communications, encompassing conventional optimization and machine-learning-aided approaches. They begin by discussing relevant AUV-based network architectures and the roles of their building blocks. Their survey then delves into physical-layer solutions, resource management cloud/edge computing, and caching AUV-aided approaches in maritime environments, categorizing them based on their performance targets.
Jadav et al. [18] proposed a framework of AI-enabled classifiers to enable the system to first distinguish between normal and malicious IoUV data, reducing the computational overhead of the network. Subsequently, the data traverses the multi-layered encrypted network, simultaneously undergoing validation through token verification and time-to-live checks to ensure secure delivery to its destination. Integrating the InterPlanetary File System (IPFS) enhances the proposed framework’s cost-effectiveness and scalability.
Kot et al. [19] evaluate AUV development by conducting experiments in real environments to rely on classical methods predominantly. Both classical and AI methods are frequently employed in simulation studies, particularly reinforcement learning and fuzzy logic. Among classical methods in simulation studies, the artificial potential field (APF) approach is the most commonly used.
Kotis et al. [20] address challenges associated with the volume, velocity, variety, and integrity of data transmitted at low bit rates due to the underwater medium. Their work explicitly explores research topics related to UUVs, focusing on interoperability and cybersecurity within swarms operating in military and search-and-rescue scenarios. The dual objectives of this work are to review existing methods and tools for semantic modeling and simulation, particularly in the context of the Internet of Underwater Things.
Gao et al. [21] analyzed the challenges associated with data transmission in wireless sensor networks when capturing island ecological and environmental information. They propose several solutions to ensure efficient and reliable data transmission in this context. Xu et al. [22] demonstrated practical scenarios with a random distribution of sea stations (SSs). They model the channel using the point-to-area model, the Rician model, and the Shadowed-Rician model. As the SS’s distance from the coastline increases, different relay stations result in specific received signal strengths at SSs due to considering different channel models. The relay station with the highest signal strength is selected at any given time. Consequently, the respective strengths of the various relay stations vary as researchers move away from the coastline, altering the association preference.
Kabanov et al. [23] establish a cohesive approach for data exchange. It is crucial to define the architecture of the Marine IoT platform. They present an overview of various approaches for determining underwater and marine communication system architectures based on the IoT concept. The work comprehensively studies Mobile IoT applications, challenges, and architectures.
UUV networks are designed to operate collaboratively and distributed, allowing UUVs to work together to achieve common objectives.
Table 3 lists UUVN related works with 5G and simulation tools for evaluation.
Table 3. Summary of UUVNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [17] | Survey presents the state-of-the-art in AUV-aided maritime communications, | Review | N/A | N/A |
| [18] | Provision of broadband, low-delay, and reliable wireless coverage | Proposed an intelligent collaborative framework by amalgamating artificial intelligence (AI) and onion routing (OR) in the IoUV environment | Mininet | Network slicing, higher data rate |
| [19] | Path planning in real time | To provide a structured review of simulations and practical implementations of collision-avoidance and path-planning algorithms in AUVs | N/A | N/A |
| [20] | Swarm formations, towards obtaining deeper insights related to the critical issues of cybersecurity and interoperability | The modeling and simulation of UUVs’ collaboration |
N/A | Security |
| [21] | The monitoring efficiency of the system and analysis data transmission | A comprehensive study of MIoT applications, challenges, and architectures | N/A | N/A |
| [22] | Derive the coverage probability (CP) of users who are annotated as surface stations (SSs) | Structure of Space-Air-Ground-Sea integrated networks (SAGSINs) | Monte-Carlo | Reliable communication |
| [23] | Platform must first be defined to use a unified approach to data exchange | This article provides an overview of approaches to determining the architectures of network underwater and marine communication systems based on the concept of the Internet of Things | N/A | N/A |
5. Underwater Optical Wireless Communication
UOWN refers to communication networks that use optical signals to transmit data underwater. Unlike traditional acoustic communication, the primary means of communication underwater, optical wireless communication leverages light to achieve higher data rates and potentially longer ranges in clear water conditions. UOWNs would have some challenges as follows:
-
LEDs and Lasers: Light-emitting diodes (LEDs) and lasers are common light sources in UOWN. LEDs are suitable for short-range, low-power applications, while lasers can be used for longer-range and higher-bandwidth communication.
-
Modulation Techniques: Various modulation techniques, such as on-off keying (OOK) or quadrature amplitude modulation (QAM), encode information onto optical signals.
-
Water Turbidity: Suspended particles and water turbidity can scatter and absorb optical signals, affecting the quality and range of communication.
-
Line-of-Sight Requirement: Optical communication relies on line-of-sight, meaning that obstacles like underwater terrain or structures can obstruct communication.
Table 4 lists Underwater Optical Wireless Networks with 5G and simulation tools for evaluation.
Table 4. Summary of Underwater Optical Wireless Networks with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [24] | Underwater-turbulence- induced scintillation |
Present a comprehensive performance comparison against state-of-the-art phaseless wave-front sensing techniques | N/A | Reliable communication |
| [25] | UVLC system under the intensity modulation/direct detection (IM/DD) | Combine the analytical expressions that present an efficient tool to depict the impact of channel parameters on the system |
Monte Carlo approach | Higher data rate |
| [26] | Optical beam between the transmitter and receiver for point-to-point (P2P) | Acoustic and optical communications are used for low-rate control data transmission and high-rate sensing data transmission |
MatLab | Energy efficiency, reliable communication |
| [27] | Modulation on dynamical chaos | Considered modulation methods (COOK and switching of chaotic modes) in combination with the correlation processing of the signal at the physical level | MatLab | Reliable communication |
Zhu et al. [24] apply the mixture exponential-generalized gamma (EGG) distribution to characterize the probability density function (PDF) of reference-channel irradiance of OAM beams coupled into a single-mode fiber (SMF). Performance metrics, including outage probability, average bit-error rate (BER), and ergodic capacity, are analyzed using the PDF for both single-input–single-output (SISO) and multioutput (MIMO) systems.
Ali et al. [25] investigate the end-to-end (E2E) performance of a dual-hop mixed Free-Space Optical (FSO) and Ultraviolet Light Communication (UVLC) system using intensity modulation/direct detection (IM/DD) with pulse amplitude modulation (PAM).
Shin et al. [26] proposed a two-phase deep reinforcement learning (TPDRL) algorithm that involves two agents (inner and outer) making different decisions within the underwater sensor. The external agent selects a transmission power level based on the long-term SNR, while the inner agent determines the beam divergence angle for the given power level, considering short-term instantaneous SNR.
Zhou et al. [27] proposed an approach that involves utilizing modulation techniques grounded in dynamical chaos at the physical layer of the communication channel. The communication channel is modeled by computing the impulse response through a numerical solution of the radiation transfer equation using the Monte Carlo method. The study evaluates modulation methods based on the correlation processing of the received signal, including chaotic mode switching and chaotic on-off keying (COOK).
While UOWN presents promising opportunities for higher data rates and faster communication in underwater environments, the specific conditions and challenges of underwater communication, such as water turbidity and signal attenuation, must be carefully considered in the design and implementation of these networks. Advances in technology and ongoing research efforts continue to contribute to the development and improvement of UOWNs.
6. Underwater Wireless Acoustic Networks (UWANs)
UWANs are communication networks that use acoustic signals to transmit data underwater. Unlike terrestrial environments where radio waves are commonly used, underwater environments pose challenges that make acoustic communication the preferred choice due to its ability to propagate through water. The key aspects of UWANs are listed as follows:
-
Acoustic Signals: Sound waves are the primary medium for communication underwater. Acoustic signals can travel long distances in water, making them suitable for underwater communication.
-
Modulation and Encoding Techniques: Various modulation schemes are used to encode information onto acoustic signals, including Frequency Shift Keying (FSK), Phase Shift Keying (PSK), and Amplitude Shift Keying (ASK).
-
Error Correction Coding: Due to the challenges of underwater communication, error correction coding techniques are often employed to enhance the reliability of data transmission.
Table 5 summarizes UAWNs with 5G and simulation tools for evaluation.
Table 5. Summary of UAWNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [28] | Identify possible attackers in the network |
A trust model based on the knowledge of the channel state | DESERT Underwater Network | Security |
| [29] | Communication resources management | Novel hybrid multiple access technique with bi-dimensional resources domain | MatLab | Reliable communication |
| [30] | Link-reliable underwater acoustic communication | ML-based solutions for UAC by adaptive modulation and coding (AMC) |
Survey | Low latency |
| [31] | Power efficiency waveforms and modulation |
Modulation scheme on the resiliency in the presence of channel impairments | MatLab | Higher data rate, low latency |
| [32] | Bathymetry and environmental data collection tasks | Proof of concept of the system design for technical feasibility | practical setup | Remote operations and control, reliable communication |
| [33] | Global resource administration | Algorithm for inadequate sending and allocation of resources through SLA | N/A | Higher data rate |
Bushnaq et al. [33] proposed a model designed to be compatible with both 5G and 6G infrastructure standards. The particle swarm optimization method employs the automated slicing framework that considers the unique characteristics of underwater acoustic methods to allocate resources efficiently, ensuring that the service level agreements of various stakeholders or applications are met. The proposed model’s effectiveness, flexibility, and efficiency are evaluated through advanced computational modeling.
Signori et al. [28] designed an effective approach that implements a reputation system. In the system, the node accumulates trust through good behavior and loses trust when exhibiting suspicious behavior. Applying a reputation system in an underwater network distinguishes intentional malicious behavior from performance degradation due to changing channel conditions, leading to a higher packet drop rate.
Petroni et al. [29] proposed a spatial division multiple access, achievable in Multiple-Input Multiple-Output (MIMO) systems. It has emerged as a promising technique suitable for the multipath propagation characteristics of UWANs. In the context of underwater medium access control, this study explores a novel hybrid multiple access technique operating in a two-dimensional resources domain, encompassing space and frequency. The objective is to alleviate multi-user interference by leveraging spatial diversity and, if necessary, implementing frequency reuse.
Huang et al. [30] explore the application of ML techniques with intelligent capabilities to improve system performance through task-oriented learning from data. The overview encompasses the literature on UAC and ML, specifically focusing on adaptive modulation and coding (AMC) as a promising niche application. Key open issues and research opportunities are discussed, providing a layered perspective and a concise taxonomy of ML algorithms relevant to UWANs.
Jakubisin et al. [31] investigate the influence of modulation schemes on the resilience of underwater acoustic communications in the presence of channel impairments, interference, and jamming. Specifically, Binary Frequency Shift Keying (BFSK) and Orthogonal Frequency Division Multiplexing (OFDM) schemes for underwater acoustic communications are examined, and the effectiveness of polar coding in enhancing resilience is evaluated.
Coccolo et al. [32] introduce the complete system implemented for small-scale demonstrations within the Robotic Vessels as-a-Service project. The project introduces an on-demand, service-based cloud system that dispatches unmanned vehicles capable of autonomously or piloted performing required services. These vessels interact with sensors in the port and the shore station through an integrated underwater and above-water network. The system’s validation through sea trials and its demonstration in an underwater sensor data collection use case establishes the proof of concept, demonstrating technical feasibility.
UWANs play a vital role in advancing our understanding of the underwater environment and supporting various applications. Ongoing research focuses on improving communication protocols, enhancing energy efficiency, and developing innovative techniques to overcome the challenges associated with acoustic communication underwater.
7. Underwater Visible Light Networks
Underwater Visible Light Communication (UVLC) networks involve the use of visible light as a medium for communication underwater. Visible light communication (VLC) utilizes the visible light spectrum, typically the range of visible light to the human eye, for data transmission. This technology is particularly relevant when traditional wireless communication methods like radio frequency may be limited. Here are key aspects of Underwater Visible Light Networks:
-
Visible Light Spectrum: UVLC uses light in the visible spectrum, which includes wavelengths between approximately 380 and 750 nanometers. Light-emitting diodes (LEDs) are commonly used as light sources for UVLC.
-
Advantages:
-
Higher Data Rates: Visible light communication can offer higher data rates than traditional acoustic communication in underwater environments.
-
Low Latency: Light travels faster than sound in water, resulting in lower communication latency.
-
No Interference with Marine Life: UVLC does not produce acoustic signals, making it less likely to interfere with marine life than acoustic communication.
-
Table 6 lists work-related UVLC with 5G and simulation tools for evaluation.
Table 6. Summary of UVLC with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [34] | Autonomous ships and their monitoring and control |
The research infrastructure’s purpose and scope of operation, as well as the technical design and physical setup | N/A | Higher data rate |
| [35] | Channel information without additional knowledge |
A novel efficient channel impulse response (CIR) prediction model for UWA MIMO communications | N/A | Reliable communication |
| [36] | Access capacity of a traditional multi-antenna communication | An algorithm for adaptive selection and merging beams based on the degree of interference between beams in space, which merges LED beams with high interference | MatLab | Higher data rate, reliable communication |
| [37] | Network performance | PIoT as an on-going academic simulator project |
PIoT | Remote control |
| [38] | Hubs for maritime logistics and the transportation of goods and people, as well as the energy demands of seaports | Identify pioneering smart seaports in the fields of automation, realtime management, connectivity, and accessibility control | N?A | Remote control |
| [39] | Potential wireless carrier candidate for signal transmission in highly critical, unknown, and acrimonious water | Comprehensive survey of recent advancements in UVLC implementations to cope with optical signal propagation issues | N/A | Low latency |
Alsos et al. [34] outline the purpose, operational scope, technical design, physical setup, and equipment of the research infrastructure. They also present a roadmap for its ongoing development to address future challenges related to autonomous ships and their supervision and control. Additionally, the paper highlights several research questions that will be explored in the lab in the coming years.
The model proposed by Hu et al. [35] utilizes preceding short-term committed information rate (CIR) data from channel estimation for online training and subsequently applies the trained model for CIR prediction to track time-varying UWA channels. To assess the predicted CIRs’ effectiveness, a scheme combining space-time block coding (STBC) and minimum mean square error (MMSE) pre-equalization for the UWA MIMO system is designed. Numerical simulations demonstrate the practical feasibility and low BER of the proposed STBC-MMSE pre-equalization scheme.
Li et al. [36] proposed a strategy that involves an algorithm for the adaptive selection and merging of beams based on the degree of interference between them in space. Beams with high interference are merged using diversity technology to reduce interference, while spatial multiplexing is still performed between low-interference LED groups. Within the same beam, researchers employ an OFDM-NOMA scheme to match and group users, sending signals from different user groups through different subcarriers to enhance resource utilization. Simulation results indicate that users employing the adaptive transmit diversity strategy achieve a BER meeting Forward Error Correction (FEC) limits, even in high inter-beam interference.
Firouzabadi et al. [37] provide a new simulation framework, an ongoing academic project, that is publicly accessible through a user interface on 14 December 2023 http://www.piotsimulation.com, requiring no installation. It employs a realistic database containing actual locations and features of BSs along with the actual locations of IoT user equipment devices. The interface serves operators and researchers, providing insights into network behavior while deploying new applications and generating data for artificial intelligence and machine learning algorithms. This paper aims to offer a comprehensive description of the PIoT modeling architecture, along with illustrative use cases to aid potential users in understanding the simulator’s capabilities.
Through an examination of container-terminal case studies and their specific contexts, Clemente et al. [38] review these crucial aspects and identify leading smart seaports in automation, real-time management, connectivity, and accessibility control. The paper also explores the potential integration of marine renewable-energy systems to contribute, at least partially, to seaport energy requirements. By integrating these considerations, the paper aims to propose a comprehensive model.
The study by Ali et al. [39] offers a thorough and comprehensive survey of recent developments in UVLC implementations aimed at addressing challenges related to optical signal propagation. The research provides a detailed overview and future perspectives on underwater optical signaling, focusing on its relevance to 5G and beyond (5GB) networks. The discussion covers various aspects, including ongoing project schemes, channel impairments, optical signal modulation techniques, architectures for UWSN incorporating energy harvesting approaches, possibilities for hybrid communication, and advancements in the IoUTs.
Integration with other technologies provides the following key research directions:
-
Hybrid approaches: Hybrid networks that combine UVLC with other communication technologies, such as acoustic communication, are explored to leverage the strengths of each in different underwater scenarios.
-
Ongoing research focuses on improving the range and reliability of UVLC in varying underwater conditions. This includes developing advanced modulation techniques and signal-processing algorithms. UVLNs represent an innovative approach to address the challenges of underwater communication. As technology continues to advance, UVLC has the potential to play a significant role in underwater sensing, exploration, and communication, offering higher data rates and new possibilities for underwater applications.
8. Practical Development Infrastructure for Internet of Underwater Things Enabled Autonomous Underwater Vehicles
8.1. Designing Shore Control Centres in the Age of Autonomous Ships
The AUVs employ control rooms to perform various scheduled tasks. Ref. [34] explored the future design of submarine control rooms, considering factors like team composition and control room layout. The sensors used in these control rooms are also integrated into a simulation environment, offering a valuable research tool.
Various research organizations share an interest in this field, and it is noteworthy that simulators are frequently employed to investigate human aspects and the implications of innovative design concepts. This approach proves highly advantageous in safety-critical scenarios, preventing accidents while testing new design ideas. It underscores the importance of creating and utilizing a simulator in the context discussed in this article. In summary, there is a certain degree of knowledge transfer from other domains to the maritime sector, such as incorporating insights from wide-angle camera views studied in aviation. However, the differences in technologies, dimensions, environmental factors, and required expertise are substantial. Therefore, the shore-based monitoring and control of Maritime Autonomous Surface Systems (MASS) stand out as crucial research facilities for advancing automation in the Maritime Domain [34]. The illustration of the implementation is shown in the Figure 1.
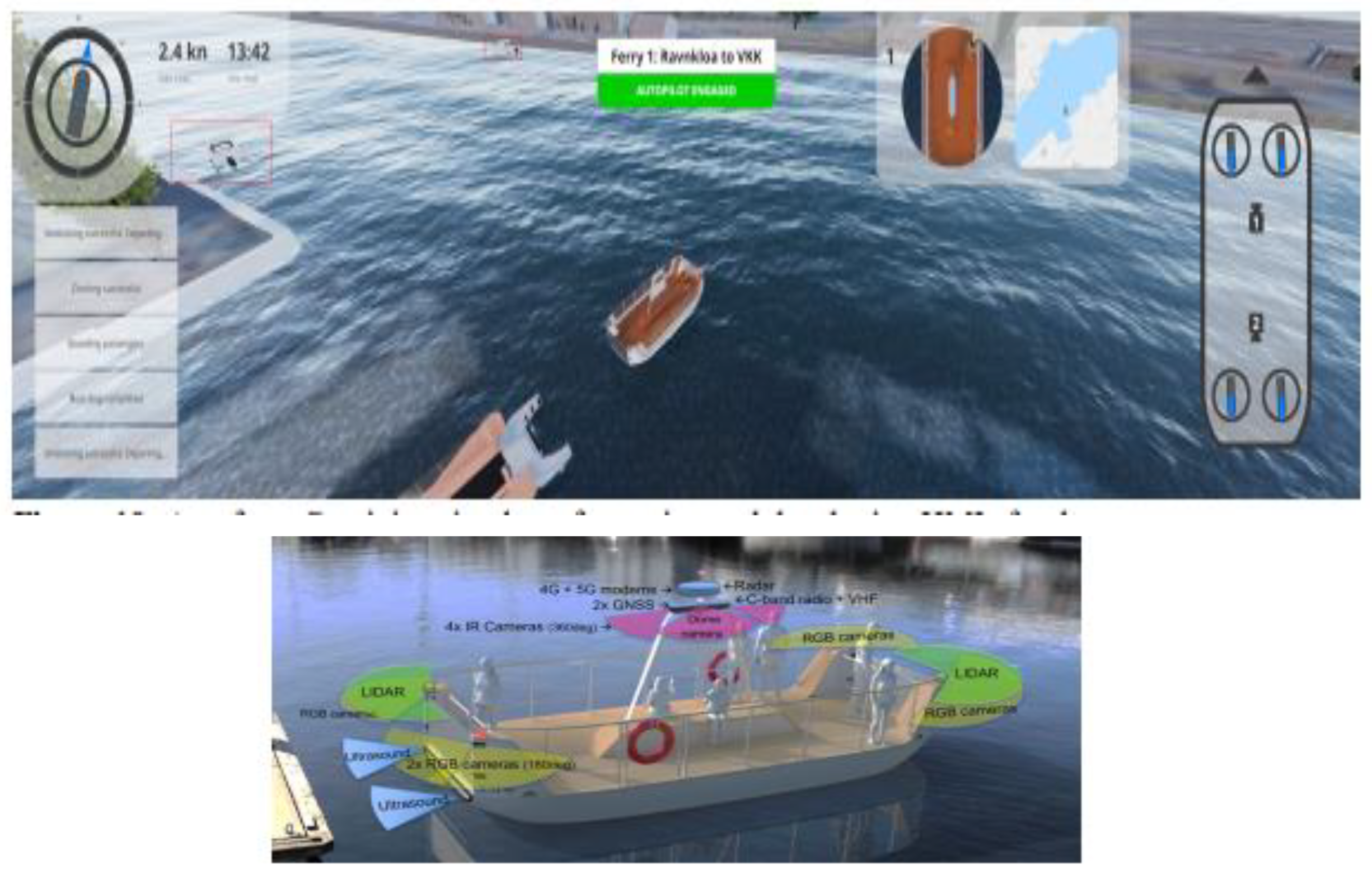
Figure 1. Shore-based control centers.
8.2. System Architecture and Communication Infrastructure for the RoboVaaS Project
The use of drones, whether they operate in the air, on land, or in water, has experienced a significant surge in popularity in recent years [23]. This trend reflects the concerted efforts of the scientific community and the industry to establish common ground for tools necessary to operate and advance such robotic systems. The primary challenges revolve around mobile robots’ diverse and intricate nature, stemming from either the nonlinearities inherent in their mathematical models or the broadly defined operational parameters. Additionally, integrating real-time data poses significant challenges, serving as input for complex navigation algorithms or teleoperation. The architecture illustration is shown in the Figure 2.
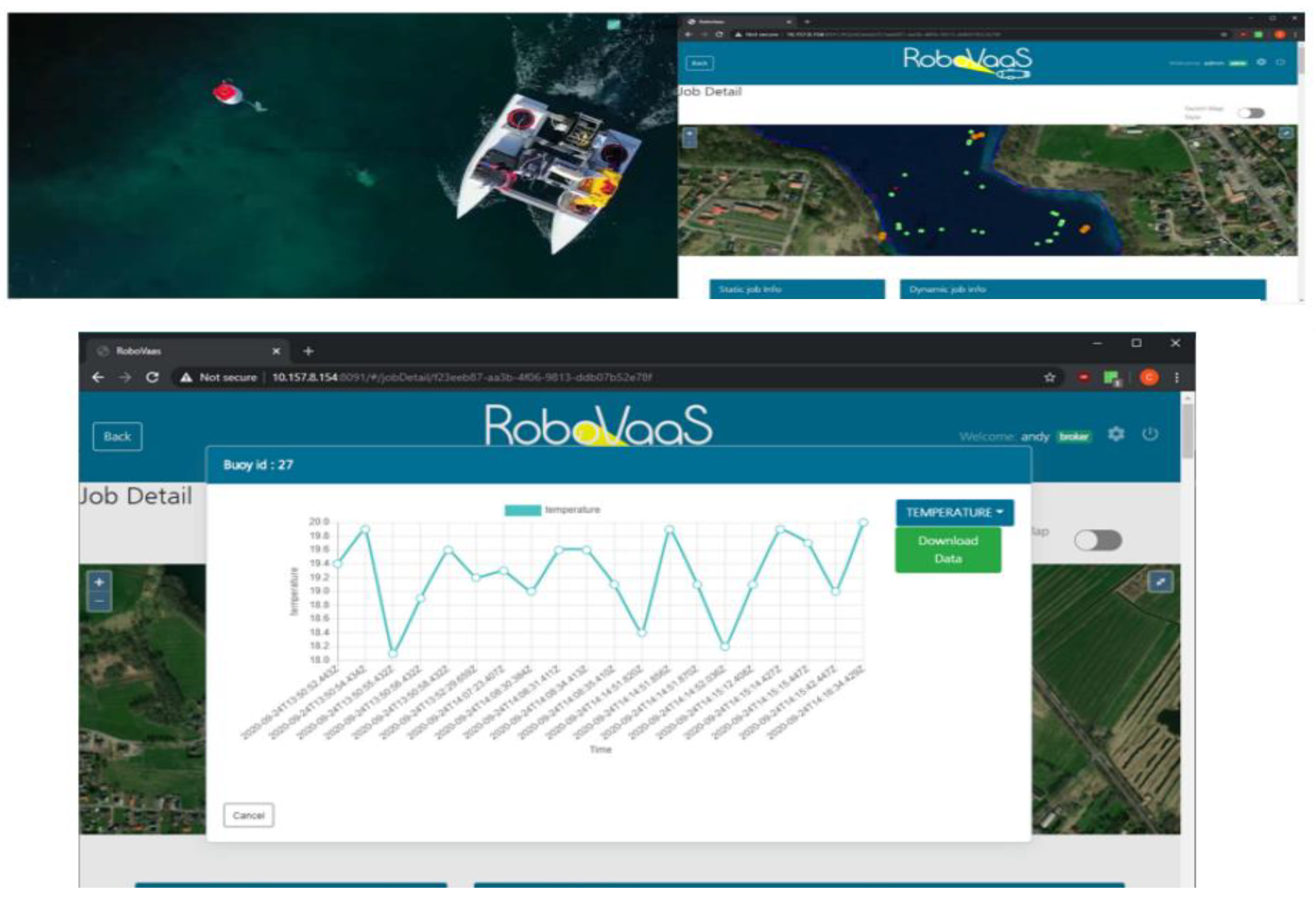
Figure 2. Web service for monitoring underwater environment in the RoboVaaS Project.
The marine assets employed in this project, both underwater and above water, require information exchange to facilitate the RoboVaaS services. For underwater data transfer, acoustic communication systems benefit from the maturity achieved in acoustic transmission and signal processing techniques [28]. Recently developed acoustic low-power sensor nodes [4] have been utilized, and the data gathered by these sensors have been gathered by a newly designed Autonomous Surface Vehicle (ASV). This ASV has an acoustic modem for underwater communication and an above-water wireless link. The ASV utilizes the wireless link to transmit the collected data to the shore.
This project introduces two primary innovative elements. Firstly, it brings forth the “as-a-service” concept to port activities, allowing the on-demand execution of tasks typically performed periodically by port authorities. Users can request services through a web interface, deviating from the traditional approach. The second significant innovation is utilizing unmanned surface and underwater vehicles for all services. It eliminates the necessity for manned vessels, specialized crews, or divers, significantly reducing risks for human operators, particularly at greater depths where risks escalate. Implementing each service involved introducing various innovative components, ranging from a surface vessel capable of transporting an ROV to integrating underwater and above-water network components. A cost-effective acoustic modem was also developed to retrieve data from a dense underwater sensor network. The article provides a detailed account of deploying this integrated and affordable system, enabling the monitoring of coasts, rivers, and lakes at a significantly lower cost than traditional offshore deployments. All components operate in real-time without the need for additional postprocessing, underscoring the high Technology Readiness Level (TRL) of the system.
References
- Gavali, R.; Kadam, M.; Patil, R. Energy Optimization using Swarm Intelligence for IoT-Authorized Underwater Wireless Sensor Networks. Microprocess. Microsyst. 2022, 93, 104597.
- Sathish, K.; Ravikumar, C.; Srinivasulu, A.; Gupta, A. Performance Analysis of Underwater Wireless Sensor Network by Deploying FTP, CBR, and VBR as Applications. J. Comput. Netw. Commun. 2022, 2022, 707.
- Soumadeep, D.; Aryan, M.P.; Prosanta, G.; Clark, J.A.; Chintan, P.; Biplab, S. AIDPS: Adaptive Intrusion Detection and Prevention System for Underwater Acoustic Sensor Networks. IEEE/ACM Trans. Netw. 2023, 1–16.
- Alablani, I.A.; Arafah, M.A. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 488.
- Hussain, A.; Hussain, T.; Ullah, I.; Muminov, B.; Khan, M.; Alfarraj, O.; Gafar, A. CR-NBEER: Cooperative-Relay Neighboring-Based Energy Efficient Routing Protocol for Marine Underwater Sensor Networks. J. Mar. Sci. Eng. 2023, 11, 1474.
- Schirripa, S.G.; Cozzella, L.; Leccese, F. Underwater Optical Wireless Communications: Overview. Sensors 2020, 20, 2261.
- Ponraj, T.C.S.; Sukumaran, R.; Vignesh, S.R.; Saravanan, M.; Manikandan, T.T.; Radhakrishnan, M. Stochastic Network Calculus for Network Function Virtualization in Underwater Wireless Sensor Networks. In Proceedings of the 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–5.
- Deivasigamani, M.; Gauni, S.; Manimegalai, C.; Kalimuthu, K. Challenges and vision of wireless optical and acoustic communication in underwater environment. Int. J. Commun. Syst. 2022, 35, 5227.
- Pourkabirian, A.; Kooshki, F.; Anisi, H.; Jindal, A. An Accurate RSS/AoA-based Localization Method for Internet of Underwater Things. Ad Hoc Netw. 2023, 145, 103177.
- Diwan, S. A Multi-Layered Energy Efficient Approach for Performance Aware Internet of Ocean Things. Int. J. Interact. Mob. Technol. (iJIM) 2022, 16, 88–100.
- Pei, J.; Liu, W.; Wang, L.; Liu, C.; Bashir, A.K.; Wang, Y. Fed-IoUT: Opportunities and Challenges of Federated Learning in the Internet of Underwater Things. IEEE Internet Things Mag. 2023, 6, 108–112.
- Omeke, K.G.; Abubakar, A.I.; Zhang, L.; Abbasi, Q.H.; Imran, M.A. How Reinforcement Learning is Helping to Solve Internet-of-Underwater-Things Problems. IEEE Internet Things Mag. 2022, 5, 24–29.
- Yan, L.; He, T.; Wang, Y.; Zhang, R.; Li, X. Hybrid Geographical Routing Protocol for Internet of Underwater Things. J. Electron. Inf. Technol. 2022, 44, 1966–1973.
- Zainab, T.; Karstens, J.; Landsiedel, O. Cross-domain fusion in smart seafloor sensor networks. Informatik Spektrum 2022, 45, 290–294.
- Taneja, A.; Rani, S.; Raza, S.; Jain, A.; Sefat, S. Energy efficient IRS assisted 6G network for Industry 5.0. Sci. Rep. 2023, 13, 12814.
- Sayed, A.; Ahmed, E.; Saeed, R.; Eltahir, I.; Abdelhaq, M.; Alsaqour, R.; Mokhtar, R. Energy Efficient CH Selection Scheme Based on ABC and Q-Learning Approaches for IoUT Applications. Systems 2023, 11, 529.
- Nomikos, N.; Gkonis, P.; Bithas, P.; Panagiotis, T. A Survey on AUV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges. IEEE Open J. Commun. Soc. 2022, 4, 56–78.
- Jadav, N.K.; Nair, A.; Gupta, R.; Tanwar, S.; Alabdulatif, A. Blockchain-Assisted Onion Routing Protocol for Internet of Underwater Vehicle Communication. IEEE Internet Things Mag. 2022, 5, 30–35.
- Kot, R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics 2022, 11, 2301.
- Kotis, K.; Stavrinos, S.; Kalloniatis, C. Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things. Future Internet 2022, 15, 11.
- Gao, Z. Research on Information Sensing and Transmitting Technology for Island Using 5G System. In Proceedings of the 2022 IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 27–29 May 2022; pp. 868–871.
- Xu, J.; Kishk, M.A.; Alouini, M.-S. Space-Air-Ground-Sea Integrated Networks: Modeling and Coverage Analysis. IEEE Trans. Wirel. Commun. 2023, 22, 6298–6313.
- Kabanov, A.; Kramar, V. Marine Internet of Things Platforms for Interoperability of Marine Robotic Agents: An Overview of Concepts and Architectures. J. Mar. Sci. Eng. 2022, 10, 1279.
- Zhu, L.; Yao, H.; Chang, H.; Tian, Q.; Zhang, Q.; Xin, X.; Yu, F.R. Adaptive Optics for Orbital Angular Momentum-Based Internet of Underwater Things Applications. IEEE Internet Things J. 2022, 9, 24281–24299.
- Ali, M.F.; Jayakody, D.N.K.; Garg, S.; Kaddoum, G.; Hossain, M.S. Dual-Hop Mixed FSO-VLC Underwater Wireless Communication Link. IEEE Trans. Netw. Serv. Manag. 2022, 19, 3105–3120.
- Shin, H.; Kim, S.M.; Song, Y. Learning-Aided Joint Beam Divergence Angle and Power Optimization for Seamless and Energy-Efficient Underwater Optical Communication. IEEE Internet Things J. 2023, 10, 22726–22739.
- Zhou, L.; Zhu, Y.; Zheng, W. Analysis and Simulation of Link Performance for Underwater Wireless Optical Communications. EAI Endorsed Trans. Wirel. Spectrum. 2017, 3, 153467.
- Signori, A.; Campagnaro, F.; Nissen, I.; Zorzi, M. Channel-Based Trust Model for Security in Underwater Acoustic Networks. IEEE Internet Things J. 2022, 9, 20479–20491.
- Petroni, A.; Ko, H.-L.; Im, T.; Cho, Y.-H.; Cusani, R.; Scarano, G.; Biagi, M. Hybrid Space-Frequency Access for Underwater Acoustic Networks. IEEE Access 2022, 10, 23885–23901.
- Huang, L.; Wang, Y.; Zhang, Q.; Han, J.; Tan, W.; Tian, Z. Machine Learning for Underwater Acoustic Communications. IEEE Wirel. Commun. 2022, 29, 102–108.
- Jakubisin, D.J.; Schutz, Z.; Davis, B. Resilient Underwater Acoustic Communications in the Presence of Interference and Jamming. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–5.
- Coccolo, E.; Delea, C.; Steinmetz, F.; Francescon, R.; Signori, A.; Au, C.N.; Campagnaro, F.; Schneider, V.; Favaro, F.; Oeffner, J.; et al. System Architecture and Communication Infrastructure for the RoboVaaS Project. IEEE J. Ocean. Eng. 2023, 48, 716–739. Available online: http://hdl.handle.net/11420/14962 (accessed on 7 January 2024).
- Bushnaq, O.M.; Zhilin, I.V.; Masi, G.D.; Natalizio, E.; Akyildiz, I.F. Automatic Network Slicing for Admission Control, Routing, and Resource Allocation in Underwater Acoustic Communication Systems. IEEE Access 2022, 10, 134440–134454.
- Alsos, O.; Veitch, E.; Pantelatos, L.; Vasstein, K.; Eide, E.; Petermann, F.; Breivik, M. NTNU Shore Control Lab: Designing shore control centres in the age of autonomous ships. J. Phys. Conf. Ser. 2022, 2311, 012030.
- Hu, X.; Huo, Y.; Dong, X.; Wu, F.-Y.; Huang, A. Channel Prediction Using Adaptive Bidirectional GRU for Underwater MIMO Communications. IEEE Internet Things J. 2023, 11, 3250–3263.
- Li, Y.; Jiang, Y.; Chen, X.; Jiang, P.; Li, S.; Hu, Y. Research on Adaptive Transmit Diversity Strategy for Reducing Interference in Underwater Optical Multi-Beam Non-Orthogonal Multiple Access Systems. Photonics 2023, 10, 1152.
- Firouzabadi, A.D.; Mellah, H.; Manzanilla-Salazar, O.; Khalvi, R.; Therrien, V.; Boutin, V.; Sansò, B. PIoT: A Performance IoT Simulation System for a Large-Scale City-Wide Assessment. IEEE Access 2023, 11, 56273–56286.
- Clemente, D.; Cabral, T.; Santos, P.; Taveira-Pinto, F. Blue Seaports: The Smart, Sustainable and Electrified Ports of the Future. Smart Cities 2023, 6, 1560–1588.
- Ali, M.F.; Jayakody, D.N.K.; Li, Y. Recent Trends in Underwater Visible Light Communication (UVLC) Systems. IEEE Access 2022, 10, 22169–22225.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.5K
Revisions:
4 times
(View History)
Update Date:
01 Feb 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No