Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Jean-David Caprace | -- | 2346 | 2023-11-21 11:32:24 | | | |
| 2 | Sirius Huang | Meta information modification | 2346 | 2023-11-22 01:58:59 | | | | |
| 3 | Sirius Huang | Meta information modification | 2346 | 2023-11-24 09:50:11 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Fun Sang Cepeda, M.; Freitas Machado, M.D.S.; Sousa Barbosa, F.H.; Santana Souza Moreira, D.; Legaz Almansa, M.J.; Lourenço De Souza, M.I.; Caprace, J. Approaches of Offshore Inspection. Encyclopedia. Available online: https://encyclopedia.pub/entry/51846 (accessed on 09 June 2026).
Fun Sang Cepeda M, Freitas Machado MDS, Sousa Barbosa FH, Santana Souza Moreira D, Legaz Almansa MJ, Lourenço De Souza MI, et al. Approaches of Offshore Inspection. Encyclopedia. Available at: https://encyclopedia.pub/entry/51846. Accessed June 09, 2026.
Fun Sang Cepeda, Maricruz, Marcos De Souza Freitas Machado, Fabrício Hudson Sousa Barbosa, Douglas Santana Souza Moreira, Maria José Legaz Almansa, Marcelo Igor Lourenço De Souza, Jean-David Caprace. "Approaches of Offshore Inspection" Encyclopedia, https://encyclopedia.pub/entry/51846 (accessed June 09, 2026).
Fun Sang Cepeda, M., Freitas Machado, M.D.S., Sousa Barbosa, F.H., Santana Souza Moreira, D., Legaz Almansa, M.J., Lourenço De Souza, M.I., & Caprace, J. (2023, November 21). Approaches of Offshore Inspection. In Encyclopedia. https://encyclopedia.pub/entry/51846
Fun Sang Cepeda, Maricruz, et al. "Approaches of Offshore Inspection." Encyclopedia. Web. 21 November, 2023.
Copy Citation
Operators of offshore production units (OPUs) employ risk-based assessment (RBA) techniques in order to minimise inspection expenses while maintaining risks at an acceptable level. However, when human divers and workers are involved in inspections conducted at high heights, the operational risks can be significant. There has been a growing trend towards the use of unmanned aerial vehicles (UAVs), autonomous surface vehicles (ASVs), remotely operated vehicles (ROVs), and autonomous underwater vehicles (AUVs) for inspections of offshore structures as a means to reduce exposure to human risk.
inspection
offshore platform
risk
maintenance
1. Introduction
1.1. Context
The offshore industry is experiencing rapid growth and technological advancement in exploration, collection, and storage. This progress is accompanied by a commitment to improving safety measures to minimise the risk of accidents [1]. Although occasional incidents pose environmental and human risks, the industry has adopted preventive measures and response strategies, demonstrating ongoing commitment to safety [2].
1.2. Challenges of Traditional Offshore Inspection Methods
The current offshore inspection methods face several issues that hinder their effectiveness and efficiency. One of the main issues is the reliance on traditional inspection techniques, such as visual inspection and nondestructive testing (NDT), which are often time-consuming, costly, and limited in their ability to access hard-to-reach areas [3]. These methods require human intervention and are subject to human error, which makes them less reliable [4]. Furthermore, offshore installations are subject to perpetual fatigue loading and harsh marine environments, which can cause structural degradation and damage [5]. Current inspection methods may not be able to accurately detect and assess the extent of such damage, putting the integrity and safety of offshore structures at risk [6].
Another issue is the lack of comprehensive risk-based inspection planning (RBI) for offshore installations [4]. RBI involves assessing the risks associated with the operation of offshore facilities and developing inspection plans based on the identified risks [7]. However, the implementation of RBI in the offshore industry has been limited and a more systematic and integrated approach to RBI is required [4]. This is particularly important for offshore wind turbines, which are expected to continue to develop in deep ocean areas in the coming years [8].
Furthermore, current inspection methods may not be able to effectively monitor the health and safety of offshore structures in real time [8]. Traditional inspection techniques often provide a snapshot of the current condition of the structure, but do not provide continuous monitoring or early detection of potential problems [3]. This can lead to unexpected failures and higher maintenance costs [9]. Advanced monitoring systems are needed to continuously collect data on the structural health of offshore installations and provide real-time feedback on their condition [8].
Moreover, current inspection methods may not be cost-effective, especially considering the large number of offshore structures and the challenging marine environments in which they operate [10]. Traditional inspection techniques require significant resources, including manpower, equipment, and time, which can result in high inspection and maintenance costs [10]. It is essential to find a cost-effective way to plan inspection and maintenance activities that takes into account the probability, consequences, and cost of these activities [10]. It is necessary to investigate alternative methods to reduce expenses while still maintaining a high level of accuracy and quality both above and below the water.
1.3. Advancements in Autonomous Technologies
To address these issues, there have been efforts to develop and implement new inspection technologies and methodologies in the offshore industry that provide more efficient and cost-effective solutions while minimising human risk [11]. These include the use of autonomous vehicles such as autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), unmanned aerial vehicles (UAVs), and autonomous surface vehicles (ASVs).
As noted in [12], these alternatives must be able to provide accurate and reliable information on the condition of the equipment, even in challenging environments such as thousands of metres below the ocean surface.
Remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) have become key players in the offshore industry, each offering unique advantages [13][14].
ROVs are tethered vehicles that are remotely operated by human operators. They are commonly used for routine inspection tasks at subsea oil and gas installations and can perform light interventions, as discussed by [15][16]. ROVs provide real-time video feeds and high-resolution imaging capabilities, allowing operators to visually inspect and assess the condition of offshore structures [17]. This makes them especially valuable for detailed close inspections that require high-resolution imagery and advanced sensory data. Their ability to be controlled in real time also allows for an immediate response to obstacles or changes in mission parameters.
AUVs, on the other hand, which operate independently of surface vessels, have distinct advantages in range, manoeuvrability, and deployment flexibility [18]. These advantages are particularly significant in complex environments where tethers can restrict operations. The absence of a tether greatly reduces the risk of entanglement with subsea structures and allows the AUV to dive deeper and faster. They are equipped with advanced instrumentation and measurement systems to perform subaquatic tasks and gather data for analysis, as shown by [18][19]. AUVs have also been used to map the seafloor and inspect cable and pipelines under the ocean surface, utilising multimodal sonar sensors for accurate mapping and monitoring [20]. AUVs have recently undergone significant advancements in terms of operational range and endurance due to the new battery technology, and certain AUV models are now capable of several days of autonomous operation, as recently demonstrated by the HUGIN© endurance AUV. Lastly, waves and impacts of underwater currents on the tether are of great concern for ROVs because they may cause them to be swept away or limit their controllability. AUVs are immune to this limitation, allowing operations under more challenging weather conditions.
Similarly, the industry has shown a recent interest in using autonomous surface vessels (ASVs) and unmanned aerial vehicles (UAVs) for the inspection of ocean structures that are above the sea water, as shown by [21]. These emerging technologies have established themselves as essential tools due to their distinct advantages and benefits.
As widely discussed by [22], ASVs are highly adaptable for collecting data on both the ocean surface and the subsurface environment, making them a reliable choice even in harsh sea conditions. These vehicles have the ability to navigate independently around offshore structures while collecting data using integrated sensors including multibeam echosounders and side-scan sonars [23]. By minimising human error and reducing risks associated with manned operations, ASVs greatly improve the efficiency of maintenance schedules and potential threat assessments. These vehicles are designed to operate in harsh ocean environments and reduce human participation in offshore infrastructure monitoring [20].
Autonomous UAV technology, also called drones, has emerged as a crucial tool for conducting inspections above the waterline. These UAVs possess the ability to access difficult-to-reach areas on floating platforms and other ocean structures, enabling them to capture detailed high-resolution imagery that offers essential information for structural health monitoring, as shown by [24][25]. With their agile manoeuvrability and advanced imaging technologies, drones can quickly detect problems such as corrosion or mechanical damage, allowing for prompt remedial actions. Some even have the capacity to climb structures [26]. Furthermore, by reducing the need for inspectors to work at great heights or in hazardous conditions, drones significantly improve safety during inspections.
2. Inspection Requirements for Offshore Production Units
To determine the effectiveness and suitability of vehicle inspection technologies, it is important to have a clear understanding of the inspection needs of offshore production units. Offshore production units, such as oil rigs and platforms, and more recently offshore wind turbines [27], must comply with various safety regulations and undergo regular inspections. These inspections are conducted to verify the integrity and functionality of the equipment, identify potential dangers or problems, and ensure compliance with safety standards. Structural integrity management (SIM) is an organised approach that aims to ensure the long-term reliability and durability of physical structures [12][28][29]. It encompasses various aspects such as human resources, systems, procedures, and assets.
In order to adhere to the inspection needs of offshore production units, it is essential to comprehend and address the unique obstacles and circumstances that these structures encounter. Maintaining the SIM plays a critical role in ensuring the safety and reliability of OPUs. This is achieved through regular inspections conducted in various areas of the platform (see Section 2.1) with the objective of identifying potential risks or damages that could jeopardise personnel, assets, and environmental integrity. These inspections are not only obligatory for regulatory compliance, but also serve as proactive measures aimed at avoiding costly incidents and failures.
Offshore production units can be divided into several zones of inspection depending on the accessibility of the asset and methodologies available to perform the inspection.
2.1. Zones of Inspections
In accordance with the literature, the researchers suggest a division of offshore structures into the following zones [Z*] (see Figure 1):
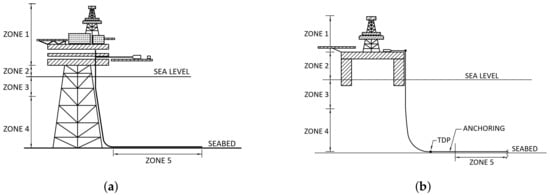
Figure 1. Inspection zones of offshore structures. (a) Fixed platform; (b) Floating platform.
-
Z1 Superstructure (from the lower deck to the upper mast): This refers to the upper part of the offshore platform, including living quarters, helidecks, and process equipment (modules). Inspections in this zone are crucial to ensure the safety and functionality of the equipment and structures located on the topside [30]. The accessibility of this zone is relatively easier compared to other areas, as it can be reached by personnel and equipment through stairs or elevators, except for some specific structures, such as flares and towers.
-
Z2 Splash/Spray zone (from the waterline to the lower deck): This zone is located above the waterline and includes areas that are exposed to waves, wind, and occasional splashes of seawater. Inspections in the splash/spray zone are crucial, as this area is susceptible to corrosion and degradation as a result of exposure to harsh environmental conditions [31]. However, this area is difficult to access and requires specialised equipment and techniques for inspection (climbing).
-
Z3 Subsea zone near the water line (below the water line up to 50 m depth): This zone encompasses the hull of the floating/fixed platform [32], as well as the equipment and connections of the risers. Inspections in this subsea zone are crucial to ensure the integrity of the hull and the proper functioning of the risers [12]. Accessing this zone for inspections can be challenging, as it commonly requires diving. Today, common ROVs and AUVs cannot operate in this depth due to limitations in their capabilities and manoeuvrability.
-
Z4 Subsea dynamic zone (from 50 m depth until the touchdown point (TDP) and pipe anchoring system laying on the seabed): This zone includes the risers that carry hydrocarbons from the subsea wells to the top-side processing facility [29]. Inspections in this subsea dynamic zone are critical in identifying potential defects or damage to the risers that could lead to leaks or failures. Inspections in this zone are particularly challenging due to the extreme depths and harsh conditions encountered. The “vertical” position of the pipes and their movements may make the inspection process difficult.
-
Z5 Subsea submerged zone (all assets laying on the seabed): This zone encompasses all assets located on the seabed, such as pipelines, structures, and equipment [28]. Inspections in this submerged subsea zone are essential to detect any damage, corrosion, or integrity issues that could affect the safety and reliability of the assets [33]. This area may be easier to inspect, as the pipes are horizontal and fixed on the seabed. However, from time to time, the equipment may be submerged in sediment or covered with marine growth, making inspections more challenging.
It is important to recognise that certain structural components can extend over several areas, requiring a range of inspection techniques within each zone. This emphasises the need for a comprehensive selection of inspection methods to effectively assess various aspects of these complex elements; see Table 1.
Table 1. Specifications of elements within different zones of offshore production units.
| Zone | Specific Element |
|---|---|
| 1 | Platform superstructure and top-side modules |
| 2, 3 | Riser balcony, I-tube, bend stiffener |
| 3, 4 | Rigid and flexible risers |
| 3, 4, 5 | Control lines and umbilicals |
| 3, 4 | Subsea structure |
| 2, 3, 4, 5 | Mooring system |
| 5 | Wellheads |
| 5 | Flowlines |
3. Common Approaches of Offshore Inspection
It should be emphasised that the traditional method used in inspection operations heavily depends on visual inspections. This method effectively identifies various anomalies such as damage (e.g. abrasion, rupture, leakage, and deformations) present on the outer covering of a submarine system. Additionally, it can also detect failures in relief valves located at the top section and identify errors in ship positioning for floating platforms. There are two primary techniques used for visual inspections: General Visual Inspection (GVI) and Close Visual Inspection (CVI). GVI involves using cameras mounted on ROVs or AUVs to visually detect damage and leaks. On the other hand, CVI requires more thorough cleaning processes and is typically employed to examine welds, corrosion levels, and cracks. These visual inspection techniques, although widely used and effective in detecting surface-level issues, have limitations when it comes to assessing the overall health and condition of underwater structures.
Common approaches to offshore inspection include mainly the use of inspectors for the superstructure (zone 1), climbing workers for the splash/spray area (zone 2), divers for the subsea area near the water line (zone 3), and remotely operated vehicles for the dynamic subsea zone (zone 4) and underwater zone (zone 5) [34]. However, in recent years, offshore companies have been trying to improve inspection efficiency while reducing risks to human life. This has led to the adoption of technological advancements in inspection techniques, such as the use of UAVs and ASVs (zones 1 and 2), mini ROVs (zone 3), advanced inspection systems (zone 4), and AUVs (zone 5). These technological advancements have revolutionised the inspection process by offering greater mobility, remote monitoring capabilities, and better accessibility to difficult-to-reach areas.
The use of drones in zones 1 and 2 allows for more efficient inspections of the superstructure and splash/spray area, reducing the need for human inspectors to physically climb or access these areas. Furthermore, drones equipped with high-resolution cameras and sensors can provide detailed visual imagery and data for analysis, allowing operators to identify potential problems or defects without the need for direct physical inspection. Similarly, mini ROVs have become popular for inspections in zone 3, as they can navigate the subsea area near the water line with greater agility and flexibility compared to human divers. Advanced inspection systems and autonomous underwater vehicles are used in zones 4 and 5, respectively. These advanced technologies offer the advantage of collecting data on the states of the subsea structure without the need for humans to operate them.
References
- Waqar, A.; Othman, I.; Shafiq, N.; Mansoor, M.S. Evaluating the critical safety factors causing accidents in downstream oil and gas construction projects in Malaysia. Ain Shams Eng. J. 2023, 102300.
- Tang, K.H.D.; Md Dawal, S.Z.; Olugu, E.U. A review of the offshore oil and gas safety indices. Saf. Sci. 2018, 109, 344–352.
- Angulo, Á.; Tang, J.; Khadimallah, A.; Soua, S.; Mares, C.; Gan, T. Acoustic emission monitoring of fatigue crack growth in mooring chains. Appl. Sci. 2019, 9, 2187.
- Goyet, J.; Straub, D.; Faber, M. Risk-based inspection planning of offshore installations. Struct. Eng. Int. 2002, 12, 200–208.
- Ma, K.; Shu, H.; Smedley, P.; L’Hostis, D.; Duggal, A. A historical review on integrity issues of permanent mooring systems. In Proceedings of the Offshore Technology Conference (OTC), Houston, TX, USA, 6–9 May 2013.
- Feijóo, M.; Zambrano, Y.; Vidal, Y.; Tutivén, C. Unsupervised damage detection for offshore jacket wind turbine foundations based on an autoencoder neural network. Sensors 2021, 21, 3333.
- Sørensen, J. Framework for risk-based planning of operation and maintenance for offshore wind turbines. Wind Energy 2009, 12, 493–506.
- Lian, J.; Cai, O.; Dong, X.; Jiang, Q.; Zhao, Y. Health monitoring and safety evaluation of the offshore wind turbine structure: A review and discussion of future development. Sustainability 2019, 11, 494.
- Kotp, M.; Hassan, W.; Mohamed, A.; Ahmed, A. Ensure the integrity of offshore risers at the splash zone area & optimize their external inspection regime. Port-Said Eng. Res. J. 2017, 21, 250–260.
- Papatzimos, A.; Dawood, T.; Thies, P. Cost-effective risk-based inspection planning for offshore wind farms. Insight Non-Destr. Test. Cond. Monit. 2018, 60, 299–305.
- Santos, W.R.D. A Importância da Inspeção em Dutos Submarinos na Prevenção de Riscos Ambientais em Águas Oceânicas. In Proceedings of the Congresso Técnico Científico da Engenharia e da Agronomia—CONTECC’2016, CONFEA, Foz do Iguaçu, Brazil, 29 August–1 September 2016.
- Sharp, J.V.; Ersdal, G. Underwater Inspection and Repair for Offshore Structures; Wiley: Hoboken, NJ, USA, 2021.
- Bond, T.; Prince, J.; McLean, D.L.; Partridge, J.C. Comparing the utility of industry rov and hybrid-auv imagery for surveys of fish along a subsea pipeline. Mar. Technol. Soc. J. 2020, 54, 33–42.
- Jones, D.O.; Gates, A.R.; Huvenne, V.A.; Phillips, A.B.; Bett, B.J. Autonomous marine environmental monitoring: Application in decommissioned oil fields. Sci. Total Environ. 2019, 668, 835–853.
- Sverdrup-Thygeson, J.; Kelasidi, E.; Pettersen, K.; Gravdahl, J. Modeling of underwater swimming manipulators. Ifac-Papersonline 2016, 49, 81–88.
- He, Y.; Wang, D.W.; Ali, Z. A review of different designs and control models of remotely operated underwater vehicle. Meas. Control 2020, 53, 1561–1570.
- Hover, F.; Eustice, R.; Kim, A.; Englot, B.; Johannsson, H.; Kaess, M.; Leonard, J. Advanced perception, navigation and planning for autonomous in-water ship hull inspection. Int. J. Robot. Res. 2012, 31, 1445–1464.
- Fernández-Avilés, F.; Papaelias, M.; Márquez, F.P.G. Autonomous underwater vehicles: Instrumentation and measurements. IEEE Instrum. Meas. Mag. 2020, 23, 105–114.
- Gorma, W.; Post, M.; White, J.; Gardner, J.; Kim, J.; Mitchell, P.; Morozs, N.; Wright, M.; Xiao, Q. Development of modular bio-inspired autonomous underwater vehicle for close subsea asset inspection. Appl. Sci. 2021, 11, 5401.
- Jung, J.; Lee, Y.; Park, J.; Yeu, T. Multi-modal sonar mapping of offshore cable lines with an autonomous surface vehicle. J. Mar. Sci. Eng. 2022, 10, 361.
- Campos, D.; Matos, A.; Pinto, A. Modular multi-domain aware autonomous surface vehicle for inspection. IEEE Access 2022, 10, 113355–113375.
- Zhang, Y.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93.
- Felski, A.; Zwolak, K. The ocean-going autonomous ship—Challenges and threats. J. Mar. Sci. Eng. 2020, 8, 41.
- Sayed, M.; Roberts, J.; McKenzie, R.; Aracri, S.; Buchoux, A.; Stokes, A. Limpet ii: A modular, untethered soft robot. Soft Robot. 2021, 8, 319–339.
- Ahmed, H.; La, H.; Gucunski, N. Review of non-destructive civil infrastructure evaluation for bridges: State-of-the-art robotic platforms, sensors and algorithms. Sensors 2020, 20, 3954.
- Myeong, W.; Myung, H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism. IEEE Access 2019, 7, 4868–4879.
- Sarker, B.R.; Faiz, T.I. Minimizing maintenance cost for offshore wind turbines following multi-level opportunistic preventive strategy. Renew. Energy 2016, 85, 104–113.
- DNV. DNV-RP-F116 Integrity Management of Submarine Pipeline Systems. Rules, Det Norske Veritas (DNV), Oslo, Norway, 2017. Available online: https://www.dnv.com/oilgas/download/dnv-rp-f116-integrity-management-of-submarine-pipeline-systems.html (accessed on 15 August 2023).
- DNV. DNV-RP-F206 Riser Integrity Management. Rules, Det Norske Veritas (DNV), Oslo, Norway, 2019. Available online: https://www.dnv.com/oilgas/download/dnv-rp-f206-riser-integrity-management.html (accessed on 15 August 2023).
- Amaechi, C.V.; Reda, A.; Butler, H.O.; Ja’e, I.A.; An, C. Review on Fixed and Floating Offshore Structures. Part II: Sustainable Design Approaches and Project Management. J. Mar. Sci. Eng. 2022, 10, 973.
- Moan, T. Life Cycle Structural Integrity Management of Offshore Structures. Struct. Infrastruct. Eng. 2018, 14, 911–927.
- Zhu, J. Review on Structural Health Monitoring of Offshore Platform. J. Phys. Conf. Ser. 2021, 2014, 012019.
- PETROBRAS. PETROBRAS N-1487 Inspeção de Dutos Rígidos Submarinos; Rules; PETROBRAS: Rio de Janeiro, Brazil, 2006.
- de Souza, A.P.F.; de Souza, M.I.L.; Netto, T.A.; Brandão, G.; Estefen, S.; Rubi, V.; Vilardo, G.P.; Procaci, M. Técnicas de Inspeção de Sistemas Submarinos—Uma Visão Geral Para Uma Implementação Ideal de Inspeção Baseada em Risco (IBR). In Proceedings of the 8th International Congress on Waterborne Transportation, Shipbuilding and Offshore Constructions Proceedings, Campinas, Galoá, Rio de Janeiro, Brazil, 26 October 2020.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
895
Revisions:
3 times
(View History)
Update Date:
24 Nov 2023
Table of Contents




Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No