Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Zhou, L.; Ye, X.; Huang, Z.; Xie, P.; Song, Z.; Tong, Y. Genetic Algorithm for the Recovery System of USVs. Encyclopedia. Available online: https://encyclopedia.pub/entry/50133 (accessed on 24 June 2026).
Zhou L, Ye X, Huang Z, Xie P, Song Z, Tong Y. Genetic Algorithm for the Recovery System of USVs. Encyclopedia. Available at: https://encyclopedia.pub/entry/50133. Accessed June 24, 2026.
Zhou, Lulu, Xiaoming Ye, Zehao Huang, Pengzhan Xie, Zhenguo Song, Yanjia Tong. "Genetic Algorithm for the Recovery System of USVs" Encyclopedia, https://encyclopedia.pub/entry/50133 (accessed June 24, 2026).
Zhou, L., Ye, X., Huang, Z., Xie, P., Song, Z., & Tong, Y. (2023, October 11). Genetic Algorithm for the Recovery System of USVs. In Encyclopedia. https://encyclopedia.pub/entry/50133
Zhou, Lulu, et al. "Genetic Algorithm for the Recovery System of USVs." Encyclopedia. Web. 11 October, 2023.
Copy Citation
Compared to other vessels, the unmanned surface vehicle (USV) has the advantage of being smaller and operating more agilely, requiring only sufficient space for the relevant sensors and auxiliary navigation devices to make sure the vehicle functions properly. Moreover, the USV can be applied in extreme conditions independently, such as strong waves, tides, and radiation leaks, by means of a predefined system or remote control by professionals.
the unmanned surface vehicle
path planning
genetic algorithm
1. Introduction
If you ask chatGPT how much of the ocean has yet to be explored by mankind, it will tell you that over 80% of the ocean remains unmapped, unobserved, and unexplored. To be honest, we have no idea exactly how much of the ocean is uncharted by humanity. But we cannot deny that there has been an increasing enthusiasm and confidence among researchers in the development of ocean exploration technologies in recent years. Driven by oceanographic research and other marine equipment requirements, the unmanned surface vehicle (USV) has gained worldwide attention for its remarkable autonomy and mission assistance capabilities.
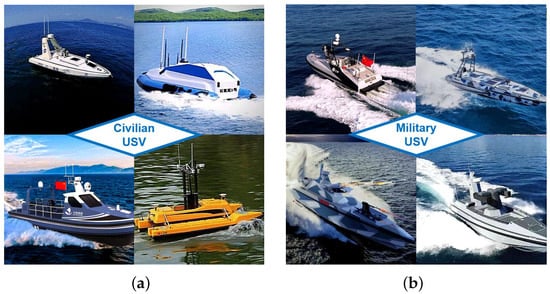
Compared to other vessels, the USV has the advantage of being smaller and operating more agilely, requiring only sufficient space for the relevant sensors and auxiliary navigation devices to make sure the vehicle functions properly. Moreover, the USV can be applied in extreme conditions independently, such as strong waves, tides, and radiation leaks, by means of a predefined system or remote control by professionals; thus, the safety of the operators can be ensured. Due to a variety of these aforementioned advantages, the USV has been well-accepted in both civilian and military fields in recent years [1][2][3][4], as shown in Figure 1.
Unlike maritime navigation, the recovery situation of the USV does not need to consider the International Regulations for Preventing Collisions at Sea (COLREGS) for its immediate environment, close to the stern ramp of its large target ship, without the interference of other vessels. The intelligence of the stowage and release process of the USV will have a direct impact on the efficiency of its mission performance. It is mainly divided into hoist-based recovery, well-deck recovery, and stern ramp recovery. Examples are shown in Figure 2. The hoist-based recovery method shows advanced development with minimal modifications to the mother ship’s hull, but recovery speed is highly affected by water surface conditions, leading to challenging bracket alignment and extended retrieval times. In contrast, the well-deck recovery technique accommodates complex water surface conditions and achieves rapid retrieval speeds but requires greater structural demands on the mother ship and the inclusion of a spacious docking bay.
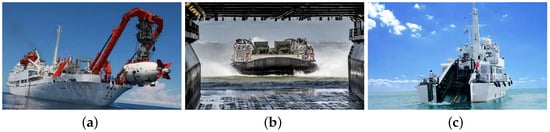
Figure 2. (a) Hoist-based recovery requires the installation of davits, parking racks, and towing devices on board the mother ship. To complete the unhooking operation, manual assistance is needed [13]. (b) The recovery enables small boat stowage on racks in a well-deck, and once the water reaches a certain depth, the release mechanism activates for deployment [14]. (c) The stern ramp of a ship [15].
The stern ramp recovery technology exhibits superior overall performance in terms of the mother ship’s hull structure requirements, adaptability to water surface conditions, and stowage efficiency, making it highly suitable for the rapid autonomous recovery of USVs. This method not only allows the mother ship to retract and release small boats at higher speeds, but also adapts to sea conditions of level 6. This advantage allows the mother ship to choose the appropriate timing for flushing. The primary operating principle of the stern ramp recovery system is that during recovery, the USV navigates a predetermined trajectory toward the mother ship’s aft section. During this approach, the USV continuously adjusts its heading angle to ensure alignment with the centerline of the mother ship’s stern ramp. In addition, it maintains a specified distance from the aft section of the mother ship while staying on course. However, achieving precise centering and control near the stern ramp remains challenging. The low dependency on manual assistance from the mothership during the recycling process results in high autonomous navigation accuracy and strong resistance to wake interference from the USV. This places higher demands on the convergence rate of the USV path planning algorithm and the accuracy of the recovery system. The development of autonomous recovery technology for USVs is still in its nascent stages.
The genetic algorithm, known for its global planning capabilities and retrieval efficiency, has proven to be highly practical. However, traditional two-dimensional modeling approaches and single fitness evaluation systems significantly increase the time required for path planning. In the realm of algorithm optimization, the viability of a genetic algorithm utilizing 3D modeling alongside a novel coding mechanism was validated. By enhancing genetic operations to boost progeny diversity, a substantial improvement in the convergence rate can be achieved. Furthermore, the multifactor screening of the fitness function enhances efficiency, albeit placing higher demands on the formulation of linear coefficients.
2. The Planning Algorithm
Currently, path planning algorithms used for USVs in domestic and international research can be classified into four main categories: graph search algorithms, virtual potential field methods, random sampling algorithms, and intelligent algorithms.
Graph search algorithms are considered classical path planning algorithms; however, their usage has declined in recent years due to the slow computational speed of individual underlying logic. Among these algorithms, the A* algorithm has garnered attention for its remarkable scalability. Singh et al. [16] considered moving ships as quasi-static entities and other ships as static obstacles during the current planning time for map modeling. They used the A* algorithm to search for collision avoidance paths by incorporating the notion of ship safety. Simulation results demonstrated the effectiveness of the algorithm in effectively avoiding moving ships while achieving commendable real-time performance.
The basic concept of the virtual potential field (VPF) method is to construct a virtual potential field within the map using certain techniques. The path is then generated using the gradient descent algorithm. However, this method suffers from inherent limitations such as local minima and oscillations. Kim et al. [17] integrated the method with the velocity obstacle method by incorporating a repulsive force field associated with the encountered velocity obstacle between two ships into the classical potential field. This fusion approach enabled dynamic collision avoidance for USVs. Similarly, Sang et al. [18] used a hierarchical programming approach. They first used the A* algorithm to generate an initial path and then used an improved artificial potential field (APF) method to generate the desired USV formation.
Random sampling methods exhibit varying convergence rates, making them extensively employed in the context of Multi-Agent Path Finding (MAPF) due to their inherent efficacy. Lee et al. [19] introduced a novel approach called the grafting RRT algorithm to achieve dynamic collision avoidance in USVs which uses the speed obstacle method to detect potential collisions and calculates the grafting angle. By generating and inserting grafting points based on this angle, successful dynamic collision avoidance is achieved.
In terms of obstacle avoidance, Khan et al. introduce a penalty term in the objective function, so that the tracking control and obstacle avoidance problems are unified into a constrained optimization problem, and active rewards are given to obstacle evaders [20]. As objectives become more complex, intelligent algorithms, such as the genetic algorithm, excel in path planning. It utilizes genetic manipulations like mutation and crossover to enhance diversity in the sample population, enabling efficient multi-target search. However, the traditional genetic algorithm exhibits low convergence rates in USV path planning and heavily relies on well-designed genetic operators. To address these limitations, Wang et al. [21] propose a combination of GA and fuzzy APF for hierarchical path planning, effectively adapting to unpredictable environments. Nonetheless, challenges persist in handling time-varying dynamic obstacles. Xin et al. [22] suggest mitigating these issues by increasing the number of superior offspring through multi-domain inversion and second fitness evaluation. Nevertheless, this approach introduces additional complexities to the algorithm and encoding process.
3. The Tracking Algorithm
The purpose of tracking control is to manipulate the propulsion system, such as the propeller and rudder, based on a rational tracking control law. This enables the USV to navigate along the intended trajectory determined by the path planning module. Depending on whether the trajectory includes a time dimension, the problem can be divided into two categories: path tracking and trajectory tracking. The stern ramp recovery involves dynamic obstacle avoidance and requires a higher speed than the mother ship during the slope flushing phase. Therefore, it is a trajectory tracking problem.
Pettersen [23] used the LOS algorithm to compute the desired heading angle and combined it with a cascaded feedback controller to control the yaw torque. This approach achieved linear tracking of the USV at a constant velocity. Fossen [24], using kinematic models for both USV and Unmanned Aerial Vehicle (UAV), rigorously proved the unified semi-global exponential stability of path tracking under LOS control. This contribution enriched the theoretical foundation of the LOS guidance law.
To improve the tracking stability and accuracy of the USV under environmental disturbances such as wind, waves, and currents, Caharija [25] introduced an integral term into the classical LOS guidance. This term compensated for the lateral drift of the USV and mitigated tracking biases caused by environmental disturbances. Building on this work, Fossen [26] used a nonlinear adaptive controller to achieve two-dimensional Dubins curve path tracking. Simulation results demonstrated the successful application of this tracking control method in accurately tracking the USV even under significant drift angles induced by wind, waves, and power disturbances.
Liu [27] proposed an improved LOS tracking algorithm based on prediction. This algorithm was designed for tracking underactuated USVs, effectively compensating the uncontrollable sideslip caused by marine environmental disturbances through adaptive terms. In addition, this study cascaded the tracking error system with the prediction error system and rigorously demonstrated the consistent global stability of the entire system.
References
- Arzamendia, M.; Espartza, I.; Reina, D.G.; Toral, S.; Gregor, D. Comparison of eulerian and hamiltonian circuits for evolutionary-based path planning of an autonomous surface vehicle for monitoring ypacarai lake. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 1495–1507.
- Peng, Z.; Wang, J.; Wang, D.; Han, Q.L. An overview of recent advances in coordinated control of multiple autonomous surface vehicles. IEEE Trans. Ind. Inform. 2020, 17, 732–745.
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* algorithm for practical unmanned surface vehicle path planning. Appl. Ocean. Res. 2019, 83, 9–20.
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control. 2016, 41, 71–93.
- Weihai Skysailing Technology. SKYSAILING. 2021. Available online: http://tianfanzhineng.com/product/info/1/ (accessed on 3 August 2023).
- SUITOR. Unmanned System. 2023. Available online: https://www.4008075595.com/content_2_12_122.html (accessed on 3 August 2023).
- Ku, Y.N.Z. Analysis of the Development of USV’s Technology and Operational Styles Abroad. 2022. Available online: https://www.eet-china.com/mp/a158815.html (accessed on 3 August 2023).
- Carboniferous. USVs Launched to Assist in Water Environmental Protection. Available online: https://stjep.cn/article (accessed on 3 August 2023).
- China Economic Net. Israel Unveils Unmanned Combat Marine System. 2014. Available online: http://en.ce.cn/World/Middleeast (accessed on 4 August 2023).
- Observer, S. Türkiye Has Developed the “Marlin” Unmanned Boat, and the Era of Unmanned Combat at Sea is Coming? 2022. Available online: https://export.shobserver.com/baijiahao/html/538455.html (accessed on 4 August 2023).
- Xie, Y. China’s First Comprehensive Geological Survey of Coastal Zones Using Unmanned Boats. 2017. Available online: https://www.shu.edu.cn/info/1055/58977.htm (accessed on 4 August 2023).
- Yunzhou Intelligence. Alumni Enterprise Yunzhou Intelligent Will Participate in the Tongji University Alumni Industry Expo. 2019. Available online: https://www.163.com/dy/article/ESNP6V960518SJIU.html (accessed on 4 August 2023).
- Eads, M.K.E. Well Deck Entry. 2017. Available online: https://www.defense.gov/Multimedia/Photos/igphoto/2002038005/ (accessed on 25 July 2023).
- Chuang, G.Z. The Invention Patent for the Stern Slide of Guangzhou Shipyard Won the first Chinese Patent Silver Award. 2019. Available online: https://www.sohu.com/picture/286333857 (accessed on 25 July 2023).
- Sohu. What Kind of Wonderful Sights Can You See If You Dive into the 7000-Meter-Deep Sea? 2022. Available online: http://it.sohu.com/a/576939130_121118997 (accessed on 25 July 2023).
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean. Eng. 2018, 169, 187–201.
- Kim, Y.H.; Son, W.S.; Park, J.B.; Yoon, T.S. Smooth path planning by fusion of artificial potential field method and collision cone approach. MATEC Web Conf. 2016, 75, 05004.
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean. Eng. 2021, 223, 108709.
- Lee, H.C.; Yaniss, T.; Lee, B.H. Grafting: A path replanning technique for rapidly-exploring random trees in dynamic environments. Adv. Robot. 2012, 26, 2145–2168.
- Khan, A.H.; Li, S.; Luo, X. Obstacle avoidance and tracking control of redundant robotic manipulator: An RNN-based metaheuristic approach. IEEE Trans. Ind. Inform. 2019, 16, 4670–4680.
- Wang, N.; Xu, H.; Li, C.; Yin, J. Hierarchical path planning of unmanned surface vehicles: A fuzzy artificial potential field approach. Int. J. Fuzzy Syst. 2021, 23, 1797–1808.
- Xin, J.; Zhong, J.; Yang, F.; Cui, Y.; Sheng, J. An improved genetic algorithm for path-planning of unmanned surface vehicle. Sensors 2019, 19, 2640.
- Pettersen, K.Y.; Lefeber, E. Way-point tracking control of ships. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 1, pp. 940–945.
- Fossen, T.I.; Pettersen, K.Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws. Automatica 2014, 50, 2912–2917.
- Caharija, W.; Pettersen, K.Y.; Sørensen, A.J.; Candeloro, M.; Gravdahl, J.T. Relative velocity control and integral line of sight for path following of autonomous surface vessels: Merging intuition with theory. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 180–191.
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control. Syst. Technol. 2014, 23, 820–827.
- Liu, L.; Wang, D.; Peng, Z. Predictor-based line-of-sight guidance law for path following of underactuated marine surface vessels. In Proceedings of the 2015 Sixth International Conference on Intelligent Control and Information Processing (ICICIP), Wuhan, China, 26–28 November 2015; pp. 284–288.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
508
Revisions:
2 times
(View History)
Update Date:
12 Oct 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No