Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Nikita Martyushev | -- | 3881 | 2023-06-26 10:28:28 | | | |
| 2 | Rita Xu | Meta information modification | 3881 | 2023-06-26 10:55:05 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling and Electric Vehicle. Encyclopedia. Available online: https://encyclopedia.pub/entry/46031 (accessed on 24 June 2026).
Martyushev NV, Malozyomov BV, Sorokova SN, Efremenkov EA, Qi M. Mathematical Modeling and Electric Vehicle. Encyclopedia. Available at: https://encyclopedia.pub/entry/46031. Accessed June 24, 2026.
Martyushev, Nikita V., Boris V. Malozyomov, Svetlana N. Sorokova, Egor A. Efremenkov, Mengxu Qi. "Mathematical Modeling and Electric Vehicle" Encyclopedia, https://encyclopedia.pub/entry/46031 (accessed June 24, 2026).
Martyushev, N.V., Malozyomov, B.V., Sorokova, S.N., Efremenkov, E.A., & Qi, M. (2023, June 26). Mathematical Modeling and Electric Vehicle. In Encyclopedia. https://encyclopedia.pub/entry/46031
Martyushev, Nikita V., et al. "Mathematical Modeling and Electric Vehicle." Encyclopedia. Web. 26 June, 2023.
Copy Citation
The estimated range of an electric vehicle is a variable value. The assessment of this power reserve is possible by various methods, and the results of the assessment by these methods will be quite different. Thus, building a model based on these cycles is an extremely important task for manufacturers of electric vehicles.
electric transport
motion cycle
mathematical model
1. Background
The global automotive industry today is characterized by structural changes, expressed in the introduction of new technologies, in the development of vehicles, and the transition of many companies to strategies for the production of electric vehicles. Electric transport is already a used technology for some countries of the world and its development will only intensify in the coming years. Thanks to the new strategies of major automakers and government decisions to tighten emissions of harmful substances from cars and support vehicles and encourage the use of alternative fuels (under various incentive measures), the EVs and fuel cells market is developing dynamically and has the potential for further growth. Many automotive companies (Tesla, Volkswagen, Toyota, BYD) and IT industry leaders (Google, Baidu, Yandex, BYD, etc.) consider next-generation vehicles (including electric) one of the most promising areas in business development and are considering strengthening technological competencies as the basis of future competitiveness in the market. Until now, when using battery electric vehicles before cars, there have been a number of limitations—relatively low performance indicators, including the resources of traction batteries, which are designed for 1000–1500 charge–discharge cycles, a relatively low mileage of autonomous driving compared to cars based on internal combustion engines, a rather high cost of batteries, an insufficient ratio of charging stations to power electric vehicles, and a decrease in the electric capacity of batteries when the ambient temperature drops below 20 °C for northern countries. Most performance indicators depend on the efficiency of replenishment, storage, and use of electricity on board an electric vehicle. These include mileage, battery life, and economic operating costs.
At the same time, the efficiency of energy use on board depends on the possibility of reducing the additional mass of the battery, which ultimately leads to an improvement in transport operation and performance in general. With existing shortcomings, it is possible to organize the effective operation of the weakest link—the battery—in such a way as to increase the resource and energy efficiency of the electric vehicle.
For this researchers need:
-
to develop a complex mathematical model of the system of traction electrical equipment, for a qualitative and quantitative assessment of the charge–discharge modes of the battery;
-
to analyze the operating modes of the battery using mathematical and simulation modeling, as part of the traction electrical equipment system of an electric vehicle; determine the thermal conditions of the battery, using simulation modeling of charge–discharge modes, with intensive movement of the electric vehicle;
-
to develop methods for determining resource characteristics based on the operating cycles of electric vehicles.
The environmental situation in the world is currently under the close attention of scientists and the public and the threat of global warming is becoming more and more real, so it is important to reduce harmful emissions into the atmosphere. In addition, there is an obvious increase in fuel prices, which contributes to the high cost of operating traditional cars. These and other factors are motivational for consumers to purchase a hybrid vehicle or a fully fledged electric vehicle [1].
At the current time, there are a large number of variations in electric vehicles. Depending on the power source and traction drive, there are: battery electric vehicles (BEV); hydrogen batteries (FCEV); combining a power plant with a power plant running on a different type of fuel (HEV) [2].
In the future, all-electric vehicles will become the most widespread. However, at the moment, manufacturers are still in search of the most energy efficient and economical power sources. Most often, the manufacturer equips its vehicles with one or another type of lithium-ion battery; however, the technologies are updated annually, because scientists are finding more and more energy-efficient battery components or improving their manufacturing technology [3].
Combined sales of hybrid (HEV) and all-electric vehicles (EV) exceeded 2 million units in 2019, according to the International Energy Agency, representing about 2.4–2.6% of the global new car market. The pandemic and global lockdown that triggered the economic crisis have placed the world’s leading electric car manufacturers in a very difficult position. To a greater extent, this affected European automakers, who faced the possible threat of penalties for non-compliance with the green program of the European Union. On 1 January 2020, new standards for carbon dioxide emissions from cars came into force in the EU. According to the new rules, automakers must produce 95% of cars with 95 g/km emissions from 2020, and from 2021 all incoming cars must have this emission figure. In addition, to stimulate the production of electric vehicles, from 2020 each car sold with an emission of less than 50 g/km is counted to automakers as 2 low-emission vehicles, from 2021 as 1.67 and from 2022 as 1.33. It was assumed that such a gradual transition and serious state support would give automakers time for a “soft” modernization of production for the release of more “green” models. Now, researchers have to start from scratch and a total and accelerated transition to hybrids and electric vehicles will require and unprecedented level of investment from European automakers. At the same time, they are at risk of losing market share in favor of electric vehicles from Tesla, the Renault–Nissan–Mitsubishi alliance, etc., and in the less expensive segment they will have to compete with cars from Chinese automakers BYD, JAC, Zotye, etc.
The term “electric vehicle” (EV) generally refers to a vehicle that is driven by an electric motor powered by a self-contained power source. According to their type, electric vehicles are divided into hybrid (HEV), charged by an internal combustion engine (in such cars, electric mileage is extremely limited), and plug-in hybrid (PHEV). Plug-in hybrids (hybrid plugins) are divided into several types:
-
parallel—they combine the operation of electric and gasoline engines and allow the battery to be charged from the network;
-
series-parallel—capable of operating as both serial and parallel hybrid vehicles with an electric motor as the main drive;
-
sequential (REEV/REX)—electric vehicles with an increased range. In this type of hybrid, the car is always powered by an electric motor that is powered directly from the battery, but the battery itself is charged while driving by the built-in fuel generator;
-
fully electric vehicles (EV/BEV) and fuel cell vehicles (FCV), which include an electrochemical generator to convert hydrogen into electrical energy.
The autonomy or driving range of modern hybrid cars reaches 750 km or more. In the near future, it can reach one thousand kilometers. Serial all-electric cars, as a rule, have an autonomy of 250–300 km. The declared autonomy of the top modification of the Tesla Model 3 is approaching 500 km, and the maximum autonomy of the Tesla Model S, according to the US Environmental Protection Agency (EPA), exceeds 600 km. Such a high autonomy of Tesla electric vehicles was achieved primarily through the use of high-capacity batteries, as well as by optimizing the battery management system. However, it should be noted that the American company Tesla has repeatedly been identified as overestimating the technical characteristics of its cars.
In 2020, the Institute for Transportation Research at the University of California (ITS-Davis) conducted a comparative study of the autonomy of hybrid (PHEV) and electric vehicles (EV) (Figure 1) [4]. Based on the data in Figure 1, it can be concluded that PHEVs are not mainly focused on running a longer distance on a battery charge, but on the efficient use of a battery charge–discharge cycle. This is also evidenced by the relatively small capacity of PHEV batteries. EVs show the promise of manufacturers to use more capacity and hence mileage.
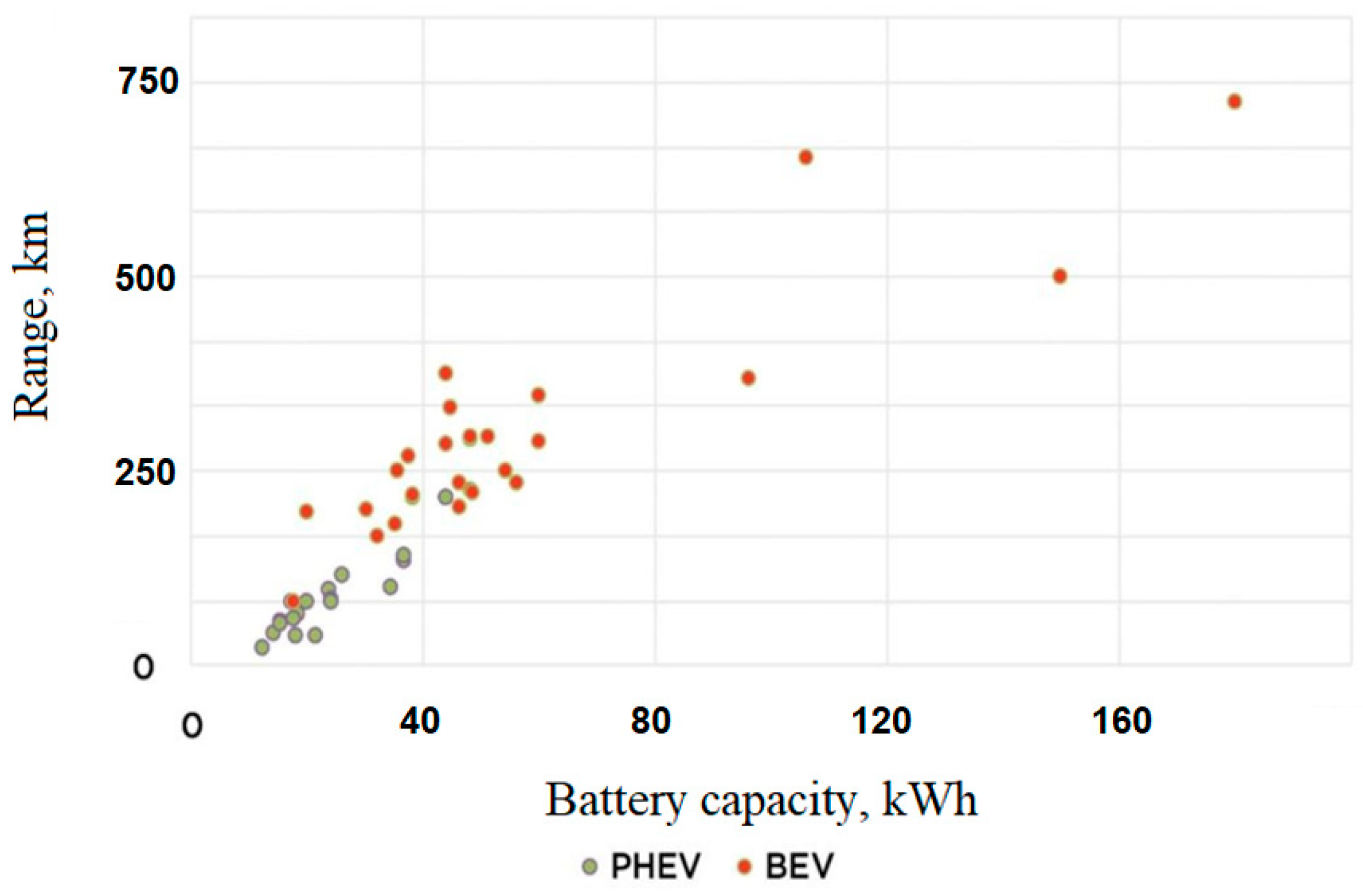
Figure 1. Comparison of hybrid (PHEV) and fully electric vehicles (BEV) autonomy.
Comparing these figures with the data that researchers have by 2022, they can safely say that the main drawback of electric vehicles associated with their low autonomy has not yet been eliminated. Thus, insufficient capacity, long charging time, and low specific energy of batteries have been limiting the efforts of electric vehicle designers for many years. In addition, the growing popularity of electric vehicles requires the use of more and more batteries, which are components of complex systems that must work optimally in order to ensure the safe and efficient use of energy.
At the same time, another key disadvantage of electric vehicles, related to the cost of batteries, is gradually becoming a thing of the past (Figure 2). If in 2005 batteries cost an average of USD 1300–1500 per kWh, then by 2015 the price had fallen by almost 3 times, to USD 500. According to optimistic forecasts [5], in 2025 the price may approach USD 100 per kWh.
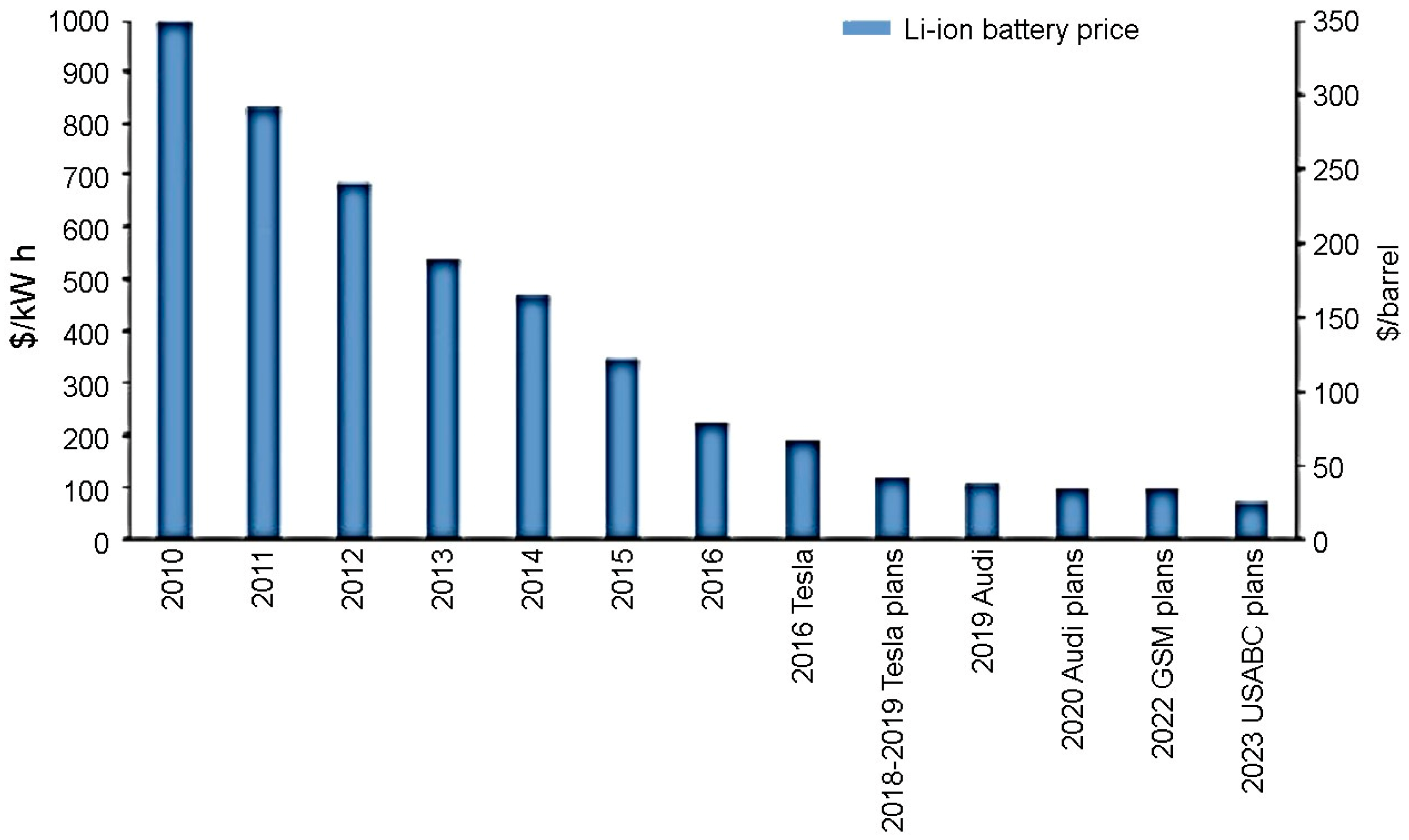
Figure 2. The cost of lithium-ion (Li-Ion) batteries for electric vehicles.
At the same time, it should be understood that the competitiveness of an electric vehicle directly depends on the cost of oil. So, at a price of USD 240 per kWh, lithium-ion batteries are competitive at an oil price of USD 75 per barrel. With an oil price of USD 50 per barrel, the cost of batteries should not exceed USD 150 per 1 kWh.
Certain grounds for optimism are provided by the improvement in battery technology. If in the 1980s nickel–metal hydride batteries had a specific capacity of up to 120 Wh/kg, then modern lithium-ion batteries used in electric vehicles can hold up to 2.6 kWh per kilogram of their own weight (Table 1).
Table 1. Characteristics of batteries of modern electric vehicles.
| Battery Parameters | Tesla Model S | Nissan Leaf | BMW i3 |
|---|---|---|---|
| Battery capacity, kWh | 85 | 24 | 22 |
| Power reserve to full charge, km | 426 | 175 | 160 |
| Resource, years | 7 | 5 | 5 |
| Full charge cycle (220 V), h | 8 | 8 | 8 |
| Energy consumption, kWh/100 km | 27.7 | 21 | 12 |
In addition, modern batteries allow a deeper charge and discharge. If for a nickel–metal hydride battery, the optimal charging range is from 40 to 60%, that is, only 20% of the total capacity, then for a lithium-ion battery it is 2.5 times greater: from 25 to 75% [6].
However, lithium-ion batteries also have significant disadvantages. Unlike most electronic integrated circuits and microchips, the optimum temperature range for lithium-ion batteries is quite narrow (25 to 45 °C) and varies by vendor, charging mode, and other factors. To ensure normal operation and avoid permanent damage, the average temperature of the cells and the temperature difference between them must be within the target range. Extended use of batteries at temperatures below −15 ˚C can reduce battery capacity and the number of possible charge cycles by half. This fact should be taken into account when operating electric vehicles in cold climates. In addition, the battery of an electric vehicle experiences degradation of approximately 0.007–0.01% with each discharge and charge cycle due to the decrease in the active substance of the anode, cathode, and electrolyte.
2. Cycles of Movement of an Electric Vehicle for Mathematical Modeling of Energy Characteristics
The automotive industry is currently one of the most important global industries, not only on an economic level, but also in terms of research and development. However, the rapid increase in the number of cars has led to a sharp increase in air pollution levels in cities. In this connection, the authorities of most developed countries are on the path of encouraging the use of vehicles with zero emissions [4].
In addition to the environmental component, the rise in fuel prices is also important. Currently, there is an increase in the popularity of electric vehicles, today there are cars with an electric motor in the assortment of many well-known automakers. There are both fully electric cars and hybrid ones, in which an internal combustion engine is combined with an electric motor. When driving in a hybrid vehicle, it is possible to cover a greater distance without refueling, because after the traction batteries are discharged, the car will work due to the internal combustion engine using combustible fuel. A fully fledged electric car is deprived of the possibility of movement due to a non-electric engine, so automakers tend to install the most capacious traction batteries possible in order to increase the range [5].
Electric cars appeared before the internal combustion engine was created. In 1841, the first electric car was shown, which was a trolley with an electric motor. The beginning of the 20th century is characterized by the ubiquity of electric vehicles and cars with a steam engine. In 1900, about half of the cars in the United States were steam-powered, and in particular, in New York, about 70 thousand electric cars worked in taxis [6][7].
The technical and economic parameters of electric vehicles primarily depend on the characteristics of the batteries used. The very first electric cars at the beginning of the 20th century were equipped with lead–acid batteries. Modern electric vehicle construction began in the 1990s of the last century, and then nickel–metal hydride (NiMH) traction batteries (batteries) were installed. In 1994, General Motors acquired the exclusive rights to NiMH from Ovonics. The battery of this type was equipped with the electric car (EV), produced since 1997 for two years. With a battery capacity of 18.7 kWh, the electric car was able to travel 240 km. However, in 2003 this model was completely withdrawn from the owners and destroyed [8].
NiMH is still used in electric cars, although lithium-ion (Li-ion) batteries have begun to replace them and the transition to a more modern energy storage system is visible everywhere. Unlike lithium-ion batteries, nickel–metal hydride batteries use hydrogen, nickel, and titanium or a similar metal to store energy. This makes them much cheaper to manufacture compared to the first type of batteries. The main obstacle to the continued use of NiMH batteries is their low energy density, which is almost 40% less than that of their main competitor. NiMH can definitely be made the same capacity as lithium-ion batteries, but only by increasing their size [8].
The first electric car to use Li-ion batteries was the Tesla Roadster in 2008. In 2010, based on the Audi A2, an electric car was developed with the innovative Kolibri AlphaPolymer battery, which is a lithium metal polymer (LMP). The difference in this technology is that it is not lithium phosphate or oxide that is used, but metallic lithium and a solid electrolyte. The capacity of the traction battery was 115 kWh, which made it possible to set a record for a range of 700 km on public roads. One of the key disadvantages of the LMP battery was its extremely low service life—100–200 charge–discharge cycles [9].
Among the 90 chemical elements from the periodic table that can participate in redox reactions, it is lithium that has the limiting characteristics, has the lowest electrode potential, and the highest current load is 3.83 A·h/year. Other chemical elements can improve one characteristic, but harm another. For these reasons, over a long period, the direction of lithium batteries has been developing [10][11].
3. Model Range of Electric Vehicles and Parameters of Mathematical Modeling
The range, in most cases, is one of the fundamental criteria for the consumer when choosing an electric vehicle model for purchase. Its value is influenced by many factors related to both the design of the vehicle and the driving style. Aggressive driving, large differences in track profile, and extreme climatic conditions significantly reduce the range [12].
Scientists from the University of Žilina (Slovakia) [13][14] assessed the factors affecting the range of an electric vehicle by modeling using the MATLAB Simulink software. As input parameters, traffic cycles based on real indicators for the cities of Žilina and Prague were used [15]. First of all, an assessment of regenerative braking in an urban environment was carried out. The comparison of vehicle deceleration from 90 km/h to 50 km/h when using regenerative braking and coasting showed greater efficiency when coasting, both under the condition of partial subsequent use of regenerative energy, and with its full consumption [16][17]. However, while driving, it is not always possible to accurately assess the right moment for effective coasting.
Electricity consumption during acceleration of an electric vehicle directly depends on the parameters of the installed electric motor. Engine operation in the zone of high efficiency values is the most energy efficient [18][19].
An assessment of the effect of the size of the battery on the range showed that, in most cases of everyday urban operation of an electric vehicle, the capacity of the battery is excessive, leading only to an increase in the weight of the electric vehicle in the absence of consumer need consumer in the proposed battery parameters [20].
The mass of the vehicle increases in proportion to the capacity of the battery. If an electric vehicle has a large capacity battery and is used for short distances, it is less efficient than the same electric vehicle with a smaller battery. In this case, an electric car with a smaller battery pack is more efficient due to the greater travel distance achieved using 1 kW of energy [21].
According to research by scientists from Columbia University (USA) [22], aimed at studying GPS data on the length of trips on electric vehicles, the distance covered by an electric car during the day does not exceed 50–80 km on average [23].
The review of studies has shown that at present the assessment of the range of an electric vehicle is a variable value. The assessment of this power reserve is possible by various methods, and the results of the assessment by these methods will be quite different. The main parameters used for such an assessment are the driving mode, road surface structure, route relief, traffic dynamics, and external operating conditions (weather conditions, technical condition of the electric vehicle) [24][25].
Most estimation methods use these parameters as factors. Standard driving cycles (NEDC, WLTC, JC08, US06) were adopted for simulation, designed to determine the economical consumption of the traction battery.
In the study, researchers developed an electric vehicle driving model based on standard driving cycles (NEDC, WLTC, JC08, US06) presented in various regions of the world. These cycles take into account the landscape of the area, climatic conditions, urbanization of the region, and traction loads [26]. The NEDC, WLTC, JC08, and US06 standard driving cycles were originally used for cars, but now that electric vehicles are becoming more popular, these cycles have also formed the basis of EV energy analysis. In this case, only the energy of liquid fuel is converted into electrical energy. Thus, the use of mathematical methods to describe various cycles of movement will allow the creation of a mathematical model for studying the range of an electric vehicle, taking into account four driving cycles, in which the lengths of cycles and the forces acting on the electric vehicle are determined; calculation of the forces of resistance to movement is carried out taking into account the efficiency of the electric motor; the energy consumption of an electric vehicle is determined. Next, a simulation of the study of motion cycles on the presented model is completed and mathematical assessment of the battery life based on the simulation results is performed.
4. Features of the Choice of Driving Cycles for Mathematical Modeling of Battery Operating Parameters
Currently, lithium-ion batteries in electric vehicles are forced to operate in severe conditions, namely, under non-standard conditions of sudden surges in load current and randomly changing charge and discharge cycles associated with acceleration and regenerative braking cycles, which leads to a deterioration in performance and intensive aging of battery materials. Therefore, in order to obtain an integral estimate of the parameters of a traction battery and SOC operated in heavy forced electric traction modes with recuperation modes, it is necessary to perform simulation mathematical modeling of the battery behavior during various driving cycles. There are a fairly large number of motion cycles [27], but the authors chose the next most difficult ones not only in terms of amplitude load, but also in terms of a large number of load cycling on an electric vehicle.
To implement the mathematical model of the electric vehicle battery charge–discharge modes, dynamic models of the following motion cycles were taken, the features of which are given below.
A driving cycle of a vehicle is a series of data points representing a vehicle’s speed over time. Some are highly stylized, such as the outdated European NEDC which was designed with specific requirements in mind but had little to do with actual driving patterns.
The NEDC driving cycle is from 2000 and calculates driving on motorways and in urban areas based on the following data. The general evaluation criterion are based on covering a distance of 11 km in 20 min. The speed indicators of this cycle are concentrated at around 33.6 km/h, at which, in a 20-min period, the car has 12 stops and, accordingly, accelerations. For urban use, NEDC offers four evaluation blocks, each covering 1013 km of distance with a driving time of approximately 3 min and 15 s. Estimated vehicle acceleration for these blocks is 18/32/50 km/h, with an average speed of 18.7 km/h. Driving outside the city limits within the cycle is estimated based on the data, where the estimated average speed of movement is 62.6 km/h, over a distance of 6.955 km, which the car travels in 400 s. At the same time, the maximum acceleration of the car is assumed at the level of 120 km/h. The cycle is designed for low speeds on the track, designed for a leisurely ride.
The JC08 movement cycle has been operating in Japan since 2007, and in 2010 it was adopted as a single evaluation standard. The estimated time for this cycle is 20 min, during which the car is expected to cover a distance of 8.17 km. The speed range of the JC08 measuring cycle is 24.4 km/h for medium speed and 81.6 km/h for maximum speed. There are several specific evaluation criteria in this cycle, firstly, the allowed acceleration is almost the maximum compared to the rest of the studied cycles, and secondly, the evaluation involves measurements taking into account the “quick” and “calm” start. Crucial to evaluating the range of electric vehicles is the fact that vehicle stops will last about 30% of the estimated time (6 min out of 20 min tested). Of course, in this mode, the electric car does not use electricity, and, accordingly, the range figures for the JC08 cycle will be the largest. The optimal calculation of this cycle is for cars that move in city traffic with constant stops at traffic lights, traffic jams, and parking lots. However, it is not optimal in its calculations for vehicles used on highways, and more precisely, it does not take high-speed operation into account at all.
The US06 driving cycle is based in the US and is designed to simulate vigorous city driving. A large number of stops, followed by a rather sharp increase in speed, are typical for this cycle.
The WLTC driving cycle is the state of the art driving cycle standard for determining the fuel and energy consumption of automobiles and electric vehicles. It was created on the basis of statistical data on the modes of movement of light vehicles in different countries. The cycle consists of four sections with different control modes, the first two of which (Low and Medium) simulate traffic in an urban environment, and the next two (High and Extra High) simulate a suburban traffic mode. Thus, the Low phase is a frequent alternation of short traction and braking modes, and the Extra High phase is a long traction mode with acceleration to high speeds followed by sharp braking. Based on these features of diverse driving cycles, building a model based on these cycles is an urgent task.
References
- Lin, C.; Tang, A.; Wang, W. A review of SOH estimation methods in lithium-ion batteries for Electric Vehicle Applications. Energy Procedia 2015, 75, 1920–1925.
- Thomann, M.; Popescu, F. Estimating the effect of domestic load and renewable supply variability on battery capacity requirements for decentralized microgrids. Procedia Comput. Sci. 2014, 32, 715–722.
- Ormston, T.; Maleville, L.; Tran, V.D.; Lucas, L.; Van Der Pols, K.; Denis, M.; Mardle, N. Lithium Ion Battery Management Strategies for European Space Operations Center Missions. In Proceedings of the SpaceOps 2014 Conference, Pasadena, CA, USA, 5–9 May 2014.
- Ashokkumar, R.; Suresh, M.; Sharmila, B.; Panchal, H.; Gokul, C.; Udhayanatchi, K.V.; Sadasivuni, K.K.; Israr, M. A Novel Method for Arduino Based Electric Vehicle Emulator. Int. J. Ambient Energy 2022, 43, 4299–4304.
- Naumann, M.; Karl, R.C.; Truong, C.N.; Jossen, A.; Hesse, H.C. Lithium-ion battery cost analysis in PV-household application. Energy Procedia 2015, 73, 37–47.
- Yagües-Goma, M.; Olivella-Rosell, P.; Villafafila-Robles, R.; Sumper, A. Aging of Electric Vehicle Battery considering mobility needs for urban areas. In Proceedings of the International Conference on Renewable Energy and Power Quality Journal, Cordoba, Spain, 8–10 April 2014; pp. 1019–1024.
- Tian, Y.; Xia, B.; Wang, M.; Sun, W.; Xu, Z. Comparison study on two model-based adaptive algorithms for SOC estimation of lithium-ion batteries in electric vehicles. Energies 2014, 7, 8446–8464.
- Xia, B.; Wang, S.; Tian, Y.; Sun, W.; Xu, Z.; Zheng, W. Experimental research on the linixcoymnzo2 lithium-ion battery characteristics for model modification of SOC estimation. Inf. Technol. J. 2014, 13, 2395–2403.
- Li, X.; Jiang, J.; Zhang, C.; Wang, L.Y.; Zheng, L. Robustness of SOC estimation algorithms for EV lithium-ion batteries against modeling errors and measurement noise. Math. Probl. Eng. 2015, 2015, 719490.
- Barcellona, S.; Brenna, M.; Foiadelli, F.; Longo, M.; Piegari, L. Analysis of aging effect on Li-polymer batteries. Sci. World J. 2015, 2015, 979321.
- Fleischer, C.; Waag, W.; Bai, Z.; Sauer, D.U. Adaptive on-line state-of-available-power prediction of lithium-ion batteries. J. Power Electron. 2013, 13, 516–527.
- He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptive State of charge estimation for Li-ion batteries based on an unscented Kalman filter with an enhanced battery model. Energies 2013, 6, 4134–4151.
- Patel, M.A.; Asad, K.; Patel, Z.; Tiwari, M.; Prajapati, P.; Panchal, H.; Suresh, M.; Sangno, R.; Israr, M. Design and Optimisation of Slotted Stator Tooth Switched Reluctance Motor for Torque Enhancement for Electric Vehicle Applications. Int. J. Ambient Energy 2022, 43, 4283–4288.
- Tseng, K.-H.; Liang, J.-W.; Chang, W.; Huang, S.-C. Regression models using fully discharged voltage and internal resistance for state of health estimation of lithium-ion batteries. Energies 2015, 8, 2889–2907.
- Sepasi, S.; Roose, L.; Matsuura, M. Extended Kalman filter with a fuzzy method for accurate battery pack state of charge estimation. Energies 2015, 8, 5217–5233.
- Sheela, A.; Suresh, M.; Gowri Shankar, V.; Panchal, H.; Priya, V.; Atshaya, M.; Sadasivuni, K.K.; Dharaskar, S. FEA Based Analysis and Design of PMSM for Electric Vehicle Applications Using Magnet Software. Int. J. Ambient Energy 2020, 43, 2742–2747.
- Prada, E.; Di Domenico, D.; Creff, Y.; Sauvant-Moynot, V. Towards advanced BMS algorithms development for (p)hev and EV by use of a physics-based model of Li-Ion Battery Systems. World Electr. Veh. J. 2013, 6, 807–818.
- Chen, L.; Tian, B.; Lin, W.; Ji, B.; Li, J.; Pan, H. Analysis and prediction of the discharge characteristics of the lithium–ion battery based on the Gray System theory. IET Power Electron. 2015, 8, 2361–2369.
- Wu, J.; Li, K.; Jiang, Y.; Lv, Q.; Shang, L.; Sun, Y. Large-scale battery system development and user-specificdriving behavior analysis for emerging electric-drive vehicles. Energies 2011, 4, 758–779.
- Qing, D.; Huang, J.; Sun, W. SOH estimation of lithium-ion batteries for electric vehicles. In Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC), Sydney, Australia, 9–11 July 2014.
- Gyan, P.; Aubret, P.; Hafsaoui, J.; Sellier, F.; Bourlot, S.; Zinola, S.; Badin, F. Experimental Assessment of Battery Cycle Life within the Simstock Research Program. Oil Gas Sci. Technol. Rev. D’ifp Energ. Nouv. 2013, 68, 137–147.
- Grolleau, S.; Delaille, A.; Gualous, H. Predicting lithium-ion battery degradation for efficient design and management. World Electr. Veh. J. 2013, 6, 549–554.
- Leng, F.; Tan, C.M.; Pecht, M. Effect of temperature on the aging rate of Li ion battery operating above room temperature. Sci. Rep. 2015, 5, 12967.
- Suresh, M.; Meenakumari, R.; Panchal, H.; Priya, V.; El Agouz, E.S.; Israr, M. An Enhanced Multiobjective Particle Swarm Optimisation Algorithm for Optimum Utilisation of Hybrid Renewable Energy Systems. Int. J. Ambient Energy 2020, 43, 2540–2548.
- Shi, Q.; Zheng, Y.B.; Wang, R.S.; Li, Y.W. The study of a new method of driving cycles construction. Procedia Eng. 2011, 16, 79–87.
- Hafsaoui, J.; Sellier, F. Electrochemical model and its parameters identification tool for the follow up of batteries aging. World Electr. Veh. J. 2010, 4, 386–395.
- Martyushev, N.V.; Malozyomov, B.V.; Khalikov, I.H.; Kukartsev, V.A.; Kukartsev, V.V.; Tynchenko, V.S.; Tynchenko, Y.A.; Qi, M. Review of Methods for Improving the Energy Efficiency of Electrified Ground Transport by Optimizing Battery Consumption. Energies 2023, 16, 729.
More
Information
Subjects:
Mathematics, Applied
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
833
Revisions:
2 times
(View History)
Update Date:
26 Jun 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No