 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Benjamin Bizjan | -- | 3429 | 2023-02-15 10:02:15 | | | |
| 2 | Lindsay Dong | + 10 word(s) | 3439 | 2023-02-16 07:33:23 | | |
Video Upload Options
Turbulent free-surface flows are encountered in several engineering applications and are typically characterized by the entrainment of air bubbles due to intense mixing and surface deformation. The resulting complex multiphase structure of the air–water interface presents a challenge in precise and reliable measurements of the free-water-surface topography. Conventional methods by manometers, wave probes, point gauges or electromagnetic/ultrasonic devices are proven and reliable, but also time-consuming, with limited accuracy and are mostly intrusive. Accurate spatial and temporal measurements of complex three-dimensional free-surface flows in natural and man-made hydraulic structures are only viable by high-resolution non-contact methods, namely, The light detection and ranging (LIDAR)-based laser scanning, photogrammetric reconstruction from cameras with overlapping field of view, or laser triangulation that combines laser ranging with high-speed imaging data. In the absence of seeding particles and optical calibration targets, sufficient flow aeration is essential for the operation of both laser- and photogrammetry-based methods, with local aeration properties significantly affecting the measurement uncertainty of laser-based methods.
1. Introduction
2. Methods for Measuring Free Water Surface
2.1. General Classification
2.2. Manometers, Wave Probes, Point Gauges
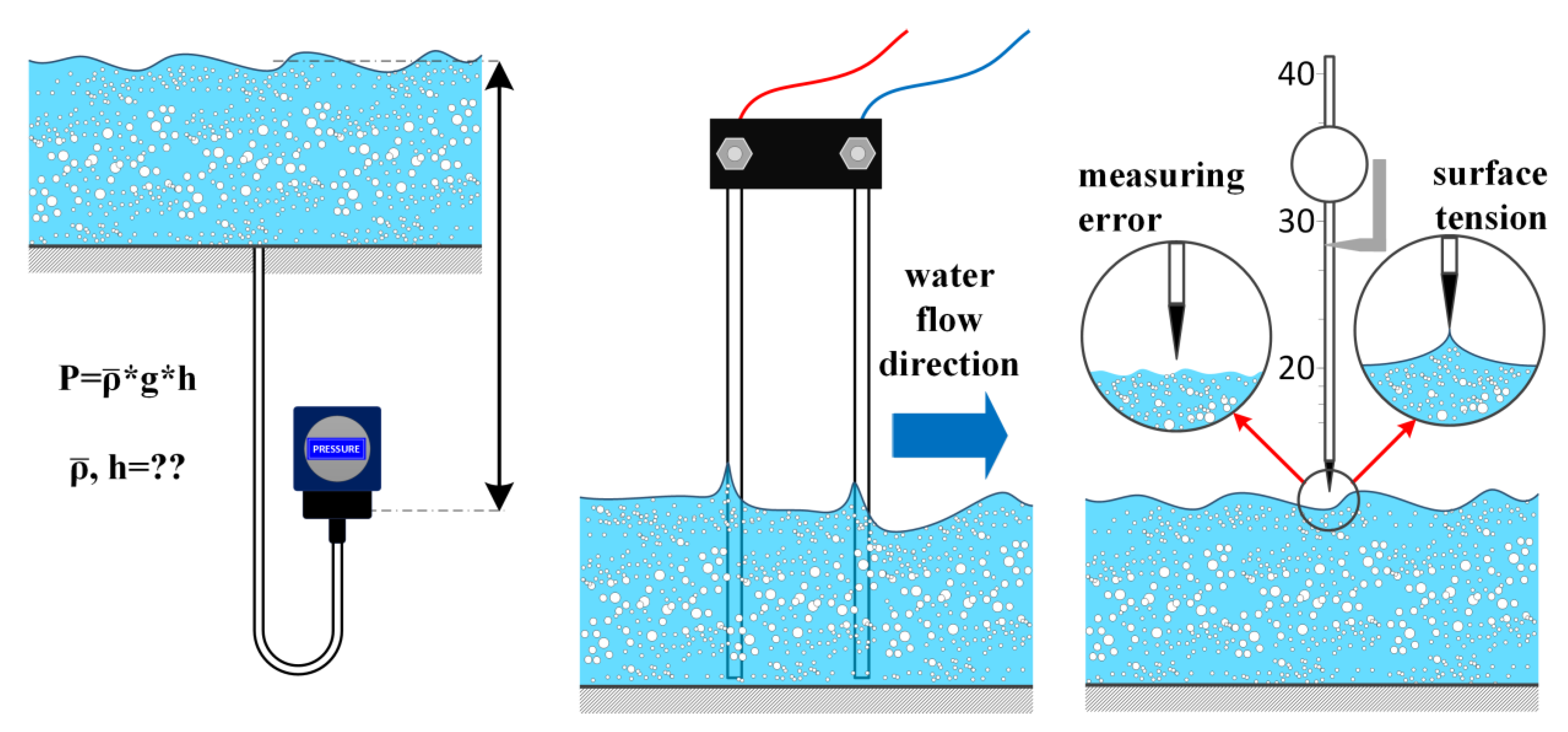
2.3. Electromagnetic and Ultrasonic Methods
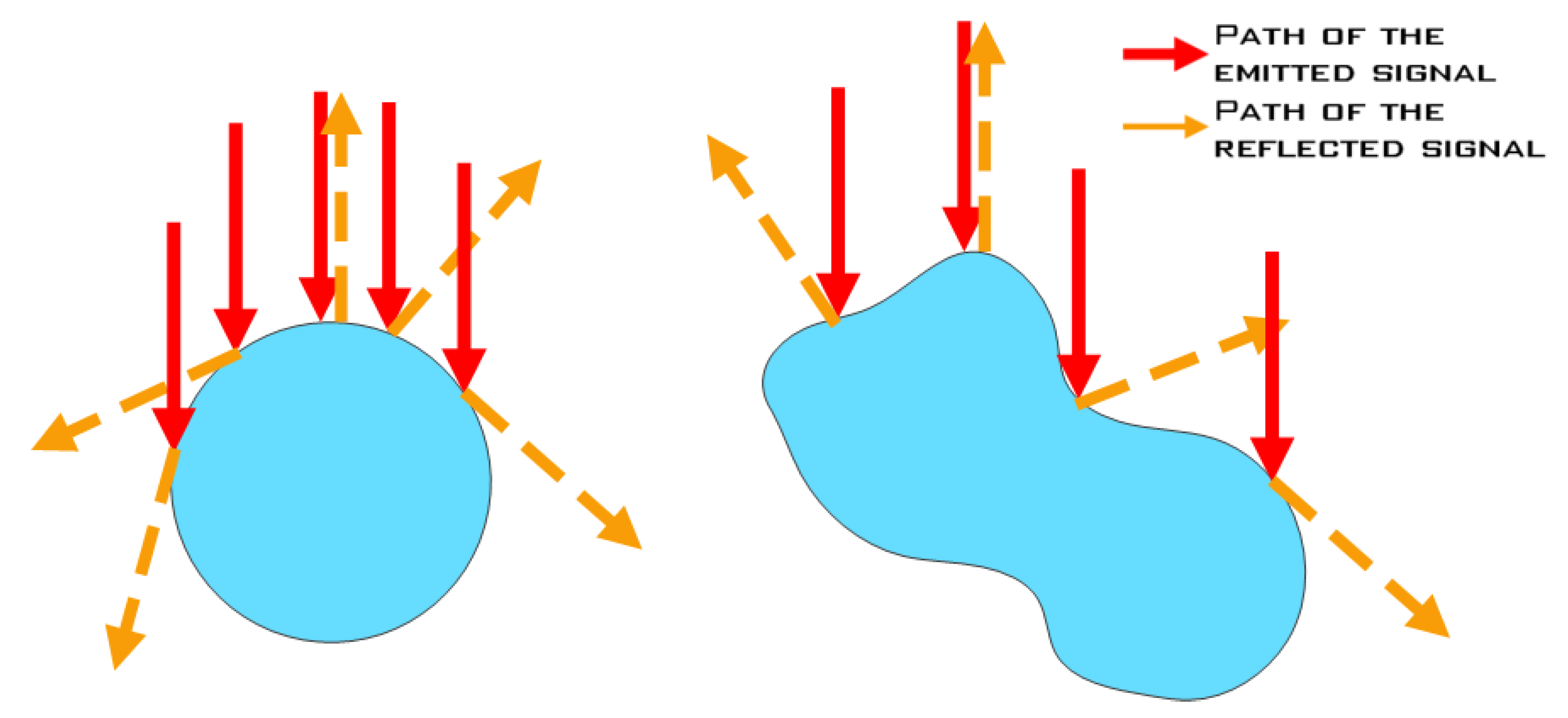
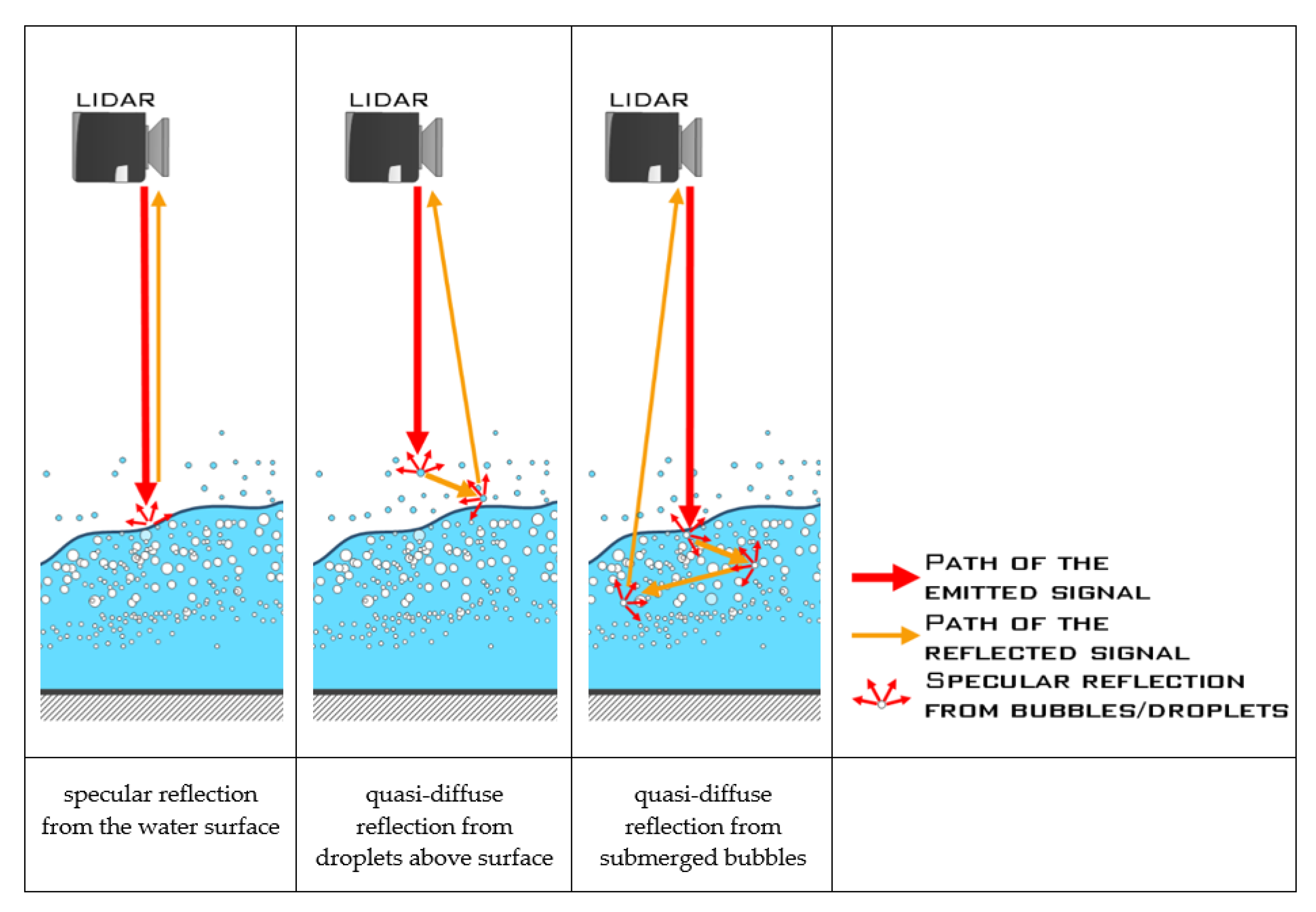
2.4. Light Detection and Ranging (LIDAR)
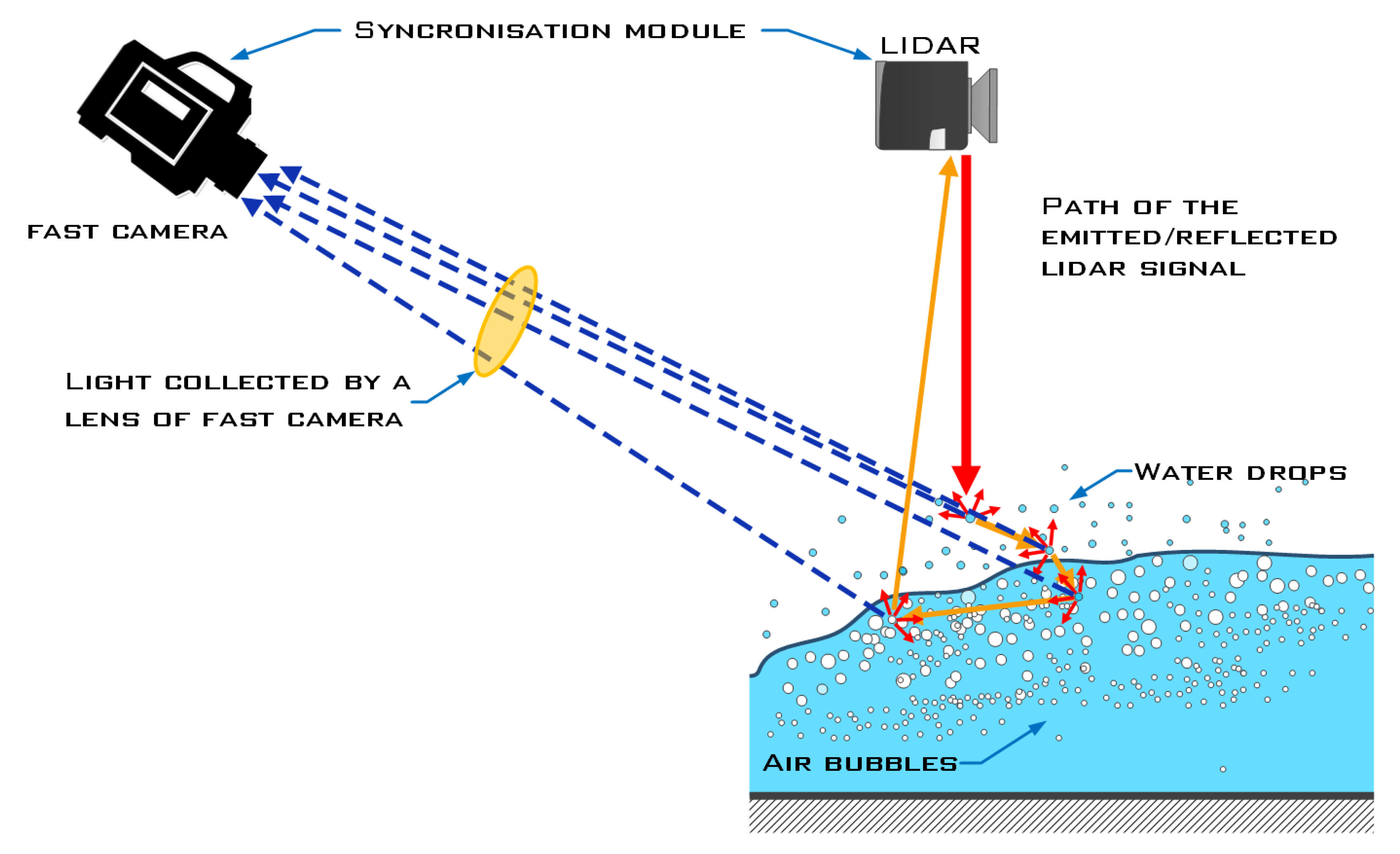
2.5. Laser Triangulation
2.6. Photogrammetric Methods
References
- Chanson, H. Hydraulics of Aerated Flows: Qui pro Quo? J. Hydraul. Res. 2013, 51, 223–243.
- Hager, W.H.; Boes, R.M. Hydraulic Structures: A Positive Outlook into the Future. J. Hydraul. Res. 2014, 52, 299–310.
- Chanson, H.; Leng, X.; Wang, H. Challenging Hydraulic Structures of the Twenty-First Century–from Bubbles, Transient Turbulence to Fish Passage. J. Hydraul. Res. 2021, 59, 21–35.
- Rak, G.; Hočevar, M.; Steinman, F. Water Surface Topology of Supercritical Junction Flow. J. Hydrol. Hydro-Mech. 2019, 67, 163–170.
- Pfister, M.; Chanson, H. Two-Phase Air-Water Flows: Scale Effects in Physical Modeling. J. Hydrodyn. 2014, 26, 291–298.
- Gualtieri, C.; Chanson, H. Physical and Numerical Modelling of Air-Water Flows: An Introductory Overview. Environ. Model. Softw. 2021, 143, 105109.
- Jiang, F.; Xu, W.; Deng, J.; Wei, W. Flow Structures of the Air-Water Layer in the Free Surface Region of High-Speed Open Channel Flows. Math. Probl. Eng. 2020, 2020, 5903763.
- Rak, G.; Hočevar, M.; Steinman, F. WATER SURFACE FLUCTUATIONS OF STANDING WAVES AT THE SUPERCRITICAL CONFLUENCE FLOW. Acta Hydrotech. 2017, 30, 107–120.
- Bung, D.; Valero, D. Re-Aeration on Stepped Spillways with Special Consideration of Entrained and Entrapped Air. Geosciences 2018, 8, 333.
- Arora, S.; Keshari, A.K. Estimation of Re-Aeration Coefficient Using MLR for Modelling Water Quality of Rivers in Urban Environment. Groundw. Sustain. Dev. 2018, 7, 430–435.
- Pavlovčič, U.; Rak, G.; Hočevar, M.; Jezeršek, M. Ranging of Turbulent Water Surfaces Using a Laser Triangulation Principle in a Laboratory Environment. J. Hydraul. Eng. 2020, 146, 04020052.
- Teng, P.; Yang, J. Modeling and Prototype Testing of Flows over Flip-Bucket Aerators. J. Hydraul. Eng. 2018, 144, 04018069.
- Pfister, M.; Gisonni, C. Head Losses in Junction Manholes for Free Surface Flows in Circular Conduits. J. Hydraul. Eng. 2014, 140, 06014015.
- Felder, S.; Chanson, H. Air–Water Flow Patterns of Hydraulic Jumps on Uniform Beds Macroroughness. J. Hydraul. Eng. 2018, 144, 04017068.
- Nallayarasu, S.; Fatt, H.; Shankar, N.J. Estimation of incident and reflected waves in regular wave experiments. Ocean. Eng. 1995, 22, 77–86.
- Brossard, J.; Hemon, A.; Rivoalen, E. Improved Analysis of Regular Gravity Waves and Coefficient of Reflexion Using One or Two Moving Probes. Coast. Eng. 2000, 39, 193–212.
- Bung, D.B. Non-Intrusive Detection of Air-Water Surface Roughness in Self-Aerated Chute Flows. J. Hydraul. Res. 2013, 51, 322–329.
- Zhang, G.; Valero, D.; Bung, D.B.; Chanson, H. On the Estimation of Free-Surface Turbulence Using Ultrasonic Sensors. Flow Meas. Instrum. 2018, 60, 171–184.
- Kramer, M.; Chanson, H.; Felder, S. Can We Improve the Non-Intrusive Characterization of High-Velocity Air–Water Flows? Application of LIDAR Technology to Stepped Spillways. J. Hydraul. Res. 2020, 58, 350–362.
- Rak, G.; Hočevar, M.; Steinman, F. Measuring Water Surface Topography Using Laser Scanning. Flow Meas.-Strum. 2017, 56, 35–44.
- Wang, K.; Tang, R.; Bai, R.; Wang, H. Evaluating Phase-Detection-Based Approaches for Interfacial Velocity and Turbulence Intensity Estimation in a Highly-Aerated Hydraulic Jump. Flow Meas. Instrum. 2021, 81, 102045.
- Murzyn, F.; Chanson, H. Two-Phase Flow Measurements in Turbulent Hydraulic Jumps. Chem. Eng. Res. Des. 2009, 87, 789–797.
- Chanson, H. On Velocity Estimations in Highly Aerated Flows with Dual-Tip Phase-Detection Probes-A Commentary. Int. J. Multiph. Flow 2020, 132, 103330.
- Kramer, M.; Hohermuth, B.; Valero, D.; Felder, S. On Velocity Estimations in Highly Aerated Flows with Dual-Tip Phase-Detection Probes-Closure. Int. J. Multiph. Flow 2021, 134, 103475.
- Sang, W.; Li, X.; Feng, Y.; Zhang, Q.; Li, D. Improvement of the Sludge Flocculation Dewatering Efficient by Electromagnetic Wave Loading: Research Based on Removal of Bound Water. Environ. Sci. Pollut. Res. 2020, 27, 3413–3427.
- Rodriguez, A.; Sah Nchez-Arcilla, A.; Mok, C.; Redondo, J.M. Macroturbulence Measurements with Electromagnetic and Ultrasonic Sensors: A Comparison under High-Turbulent Flows; Springer: Berlin/Heidelberg, Germany, 1999; Volume 27.
- Clifford, N.J.; French, R.J.; Hardisty, J. Monitoring and Modeling Turbulent Flows. In Turbulence: Perspectives on Flow and Sediment Transport; Wiley: New York, NY, USA, 1993.
- Valero, D.; Chanson, H.; Bung, D.B. Robust Estimators for Free Surface Turbulence Characterization: A Stepped Spillway Application. Flow Meas. Instrum. 2020, 76, 101809.
- Rak, G.; Hočevar, M.; Steinman, F. Non-Intrusive Measurements of Free-Water-Surface Profiles and Fluctuations of Turbu-lent, Two-Phase Flow Using 2-D Laser Scanner. Meas. Sci. Technol. 2020, 31, 064001.
- Chen, Q.; Wang, H.; Zhang, H.; Sun, M.; Liu, X. A Point Cloud Filtering Approach to Generating DTMs for Steep Moun-tainous Areas and Adjacent Residential Areas. Remote Sens. 2016, 8, 71.
- Wang, R.; Hu, Y.; Wu, H.; Wang, J. Automatic Extraction of Building Boundaries Using Aerial LiDAR Data. J. Appl. Remote Sens. 2016, 10, 016022.
- Prufer, K.M.; Thompson, A.E.; Kennett, D.J. Evaluating Airborne LiDAR for Detecting Settlements and Modified Landscapes in Disturbed Tropical Environments at Uxbenká, Belize. J. Archaeol. Sci. 2015, 57, 1–13.
- Risbøl, O.; Briese, C.; Doneus, M.; Nesbakken, A. Monitoring Cultural Heritage by Comparing DEMs Derived from Historical Aerial Photographs and Airborne Laser Scanning. J. Cult. Herit. 2015, 16, 202–209.
- Awrangjeb, M.; Lu, G.; Fraser, C.S. Automatic Building Extraction from LIDAR Data Covering Complex Urban Scenes. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences-ISPRS Archives. Int. Soc. Photogramm. Remote Sens. 2014, 40, 25–32.
- Zhang, Y.; Li, Q.; Lu, H.; Liu, X.; Huang, X.; Song, C.; Huang, S.; Huang, J. Optimized 3D Street Scene Reconstruction from Driving Recorder Images. Remote Sens. 2015, 7, 9091–9121.
- Kelbe, D.; van Aardt, J.; Romanczyk, P.; van Leeuwen, M.; Cawse-Nicholson, K. Marker-Free Registration of Forest Terres-trial Laser Scanner Data Pairs with Embedded Confidence Metrics. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4314–4330.
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting Forest Stand Characteristics with Airborne Scanning Lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1372.
- Palace, M.; Sullivan, F.B.; Ducey, M.; Herrick, C. Estimating Tropical Forest Structure Using a Terrestrial Lidar. PLoS ONE 2016, 11, e0154115.
- Brodu, N.; Lague, D. 3D Terrestrial Lidar Data Classification of Complex Natural Scenes Using a Multi-Scale Dimensionality Criterion: Applications in Geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134.
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near Water Surface Penetration in Laser Bathymetry—A Case Study at the River Pielach. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Göttingen, Germany, 16 October 2013; Copernicus GmbH: Göttingen, Germany, 2013; Volume 2, pp. 175–180.
- Smith, M.; Vericat, D.; Gibbins, C. Through-Water Terrestrial Laser Scanning of Gravel Beds at the Patch Scale. Earth Surf. Process. Landf. 2012, 37, 411–421.
- Mandlburger, G.; Hauer, C.; Höfle, B.; Habersack, H.; Pfeifer, N. Optimisation of LiDAR Derived Terrain Models for River Flow Modelling. Hydrol. Earth Syst. Sci. 2009, 13, 1453–1466.
- Li, R.; Splinter, K.D.; Felder, S. LIDAR Scanning as an Advanced Technology in Physical Hydraulic Modelling: The Stilling Basin Example. Remote Sens. 2021, 13, 3599.
- Škerjanec, M.; Kregar, K.; Štebe, G.; Rak, G. Analysis of Floating Objects Based on Non-Intrusive Measuring Methods and Machine Learning. Geomorphology 2022, 408, 108254.
- Lee, S.J.Y.; An, H.; Wang, P.C.; Hang, J.G.; Yu, S.C.M. Effects of Liquid Viscosity on Bubble Formation Characteristics in a Typical Membrane Bioreactor. Int. Commun. Heat Mass Transf. 2021, 120, 105000.
- Blenkinsopp, C.E.; Mole, M.A.; Turner, I.L.; Peirson, W.L. Measurements of the Time-Varying Free-Surface Profile across the Swash Zone Obtained Using an Industrial LIDAR. Coast. Eng. 2010, 57, 1059–1065.
- Blenkinsopp, C.E.; Turner, I.L.; Allis, M.J.; Peirson, W.L.; Garden, L.E. Application of LiDAR Technology for Measurement of Time-Varying Free-Surface Profiles in a Laboratory Wave Flume. Coast. Eng. 2012, 68, 1–5.
- Hofland, B.; Diamantidou, E.; van Steeg, P.; Meys, P. Wave Runup and Wave Overtopping Measurements Using a Laser Scanner. Coast. Eng. 2015, 106, 20–29.
- Martins, K.; Blenkinsopp, C.E.; Zang, J. Monitoring Individual Wave Characteristics in the Inner Surf with a 2-Dimensional Laser Scanner (LiDAR). J. Sens. 2016, 2016, 7965431.
- Martins, K.; Bonneton, P.; Frappart, F.; Detandt, G.; Bonneton, N.; Blenkinsopp, C.E. High Frequency Field Measurements of an Undular Bore Using a 2D LiDAR Scanner. Remote Sens. 2017, 9, 462.
- Martins, K.; Blenkinsopp, C.E.; Power, H.E.; Bruder, B.; Puleo, J.A.; Bergsma, E.W.J. High-Resolution Monitoring of Wave Transformation in the Surf Zone Using a LiDAR Scanner Array. Coast. Eng. 2017, 128, 37–43.
- Montano, L.; Li, R.; Felder, S. Continuous Measurements of Time-Varying Free-Surface Profiles in Aerated Hydraulic Jumps with a LIDAR. Exp. Therm. Fluid Sci. 2018, 93, 379–397.
- Montano, L.; Felder, S. LIDAR Observations of Free-Surface Time and Length Scales in Hydraulic Jumps. J. Hydraul. Eng. 2020, 146, 04020007.
- Li, R.; Splinter, K.D.; Felder, S. Aligning Free Surface Properties in Time-Varying Hydraulic Jumps. Exp. Therm. Fluid Sci. 2021, 126, 110392.
- Szeliski, R. Computer Vision: Algorithms and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2022.
- Amann, M.-C.; Bosch, T.; Lescure, M.; Myllylä, R.; Rioux, M. Laser Ranging: A Critical Review of Usual Techniques for Distance Measurement. Opt. Eng. 2001, 40, 10.
- Mulsow, C.; Schulze, M.; Westfeld, P. An optical triangulation method for height measurements on instationary water surfaces. Photogramm. Fernerkund. Geoinf. 2007, 2007, 177.
- Mulsow, C.; Maas, H.G.; Westfeld, P.; Schulze, M. Triangulation Methods for Height Profile Measurements on Instationary Water Surfaces. J. Appl. Geod. 2008, 2, 21–29.
- Furukawa, Y.; Hernández, C. Multi-View Stereo: A Tutorial. Found. Trends Comput. Graph. Vis. 2015, 9, 1–148.
- Spreitzer, G.; Tunnicliffe, J.; Friedrich, H. Using Structure from Motion Photogrammetry to Assess Large Wood (LW) Ac-cumulations in the Field. Geomorphology 2019, 346, 106851.
- Shih, N.J.; Wu, Y.C. AR-Based 3D Virtual Reconstruction of Brick Details. Remote Sens. 2022, 14, 748.
- Grehl, S.; Sasstuba, M.; Donner, M.; Ferber, M.; Schreiter, F.; Mischo, H.; Jung, B. Towards Virtualization of Underground Mines Using Mobile Robots-from 3D Scans to Virtual Mines. In Proceedings of the Southern African Institute of Mining and Metallurgy MPES 2015–Smart Innovation in Mining, Johannesburg, South Africa, 8–11 November 2015; The Southern African Institute of Mining and Metallurgy: Johannesburg, South Africa, 2015.
- Ferreira, E.; Chandler, J.; Wackrow, R.; Shiono, K. Automated Extraction of Free Surface Topography Using SfM-MVS Pho-togrammetry. Flow Meas. Instrum. 2017, 54, 243–249.

