Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Giovanni Pau | -- | 1254 | 2023-01-18 18:10:24 | | | |
| 2 | Rita Xu | Meta information modification | 1254 | 2023-01-19 03:12:28 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Sathish, K.; Venkata, R.C.; Anbazhagan, R.; Pau, G. USV and AUV for Underwater Wireless Sensor Networks. Encyclopedia. Available online: https://encyclopedia.pub/entry/40372 (accessed on 12 June 2026).
Sathish K, Venkata RC, Anbazhagan R, Pau G. USV and AUV for Underwater Wireless Sensor Networks. Encyclopedia. Available at: https://encyclopedia.pub/entry/40372. Accessed June 12, 2026.
Sathish, Kaveripakam, Ravikumar Chinthaginjala Venkata, Rajesh Anbazhagan, Giovanni Pau. "USV and AUV for Underwater Wireless Sensor Networks" Encyclopedia, https://encyclopedia.pub/entry/40372 (accessed June 12, 2026).
Sathish, K., Venkata, R.C., Anbazhagan, R., & Pau, G. (2023, January 18). USV and AUV for Underwater Wireless Sensor Networks. In Encyclopedia. https://encyclopedia.pub/entry/40372
Sathish, Kaveripakam, et al. "USV and AUV for Underwater Wireless Sensor Networks." Encyclopedia. Web. 18 January, 2023.
Copy Citation
Oceanographic data collection, disaster prevention, aided navigation, critical observation sub-missions, contaminant screening, and seaward scanning are just a few of the submissions that use underwater sensor hubs. Unmanned submerged vehicles (USVs) or autonomous acoustic underwater vehicles (AUVs) through sensors would similarly be able to explore unique underwater resources and gather data when utilized in conjunction with integrated screen operations. The most advanced technological method of oceanic observation is wireless information routing beneath the ocean or generally underwater. Water bottoms are typically observed using oceanographic sensors that collect data at certain ocean zones.
network of underwater sensors
arrival time
arrival time difference
1. Introduction
Water covers the majority of the surface of the Earth. Recently, there has been a flow of concentration aimed at discovering relatively uncharted regions. A configurable number of sensors are deployed using Underwater Acoustic Sensor Networks (UW-ASN) to carry out monitoring operations over a specific area [1]. As a result of multiple previous tragedies, humans now continuously monitor ocean ecosystems for various reasons, including scientific, environmental, and military purposes. For these monitoring tasks, industries are interested in immersing sensor nodes.
Emerging technologies such as autonomous cars and sensor deployment capabilities inspired the underwater sensor networking system. Even though there are communication problems, the idea can be implemented using acoustics technology. For short-range communications, interdependent communication strategies have been proposed [2]. The Underwater Acoustic Networks are unique and can be used for industrial and commercial purposes [3]. This research raises several unresolved issues which are shown in Figure 1. In order to determine the natural facts of oceanic resources and collect scientific data for monitoring, AUVs and UUVs are equipped with underwater sensors that may also be viewed. Various problems can be resolved using underwater sensor networks because of the technology’s effectiveness. The network’s diverse technologies, such as localization and energy efficiency, help to solve issues such as node scattering, high attenuation, and absorption impact [4].
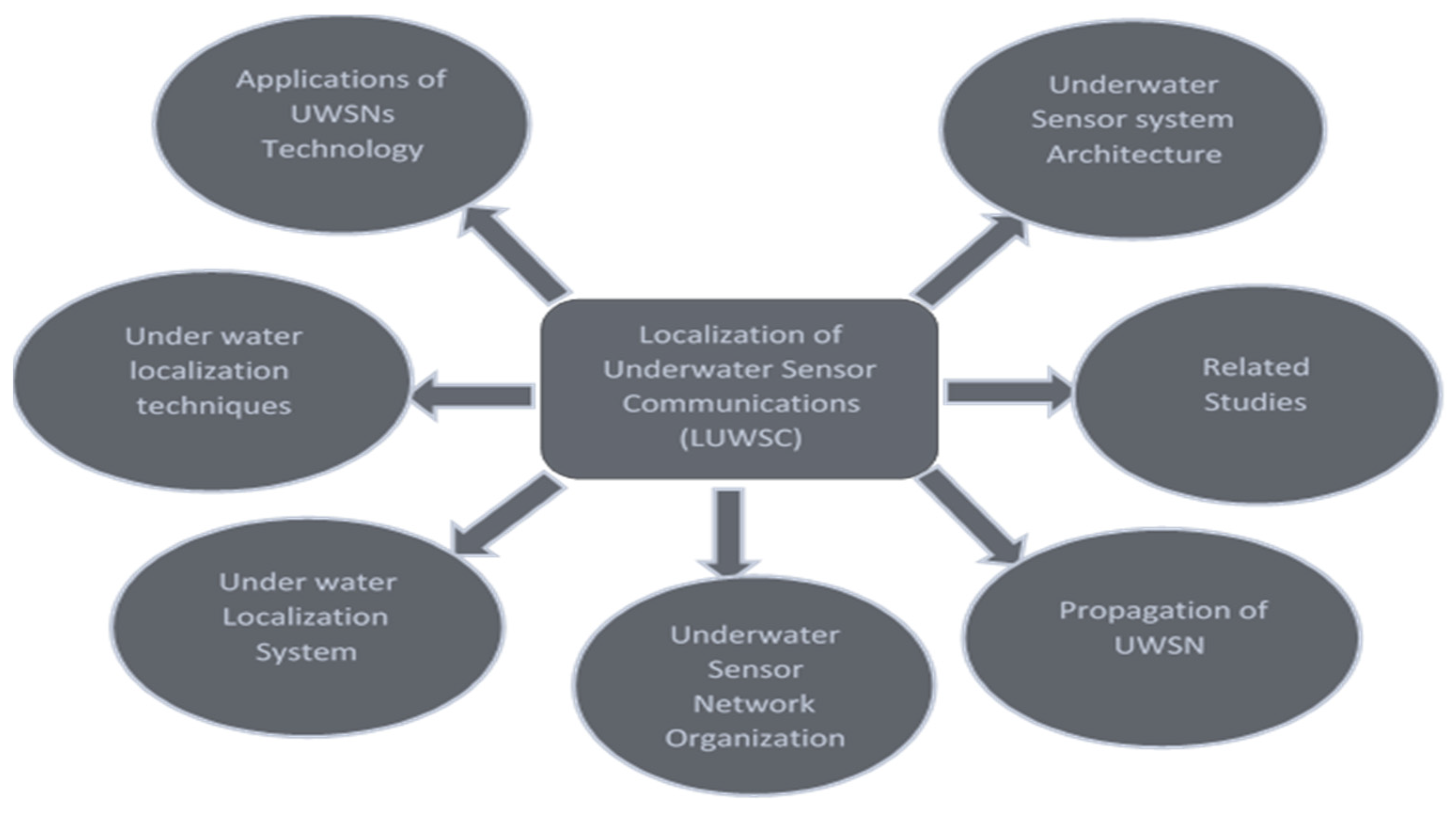
Figure 1. Organization of the research.
High concentrations of saline water, electromagnetic, optical, and radio waves can travel great distances underwater and be dispersed in numerous directions [5]. Because of this, the situation can be managed by utilizing various methods, such as a subterranean setting, and data might be easily conveyed using an acoustic transmission is depicted in Figure 2. Multi-hop networks are required because underwater sensor nodes are more significant, consume more power, and must be replaced frequently [6]. It is challenging to replace nodes and batteries in multi-hop networks that penetrate downward at the surface and transfer data once or several times. Information can be advanced to onshore control stations through data sinking. Higher bandwidth-demanding routing techniques have considerable end-to-end delays; hence, they should not be used in these conditions. Underwater communication is challenging due to propagation delay, a high bit error rate, and a limited bandwidth [7][8].
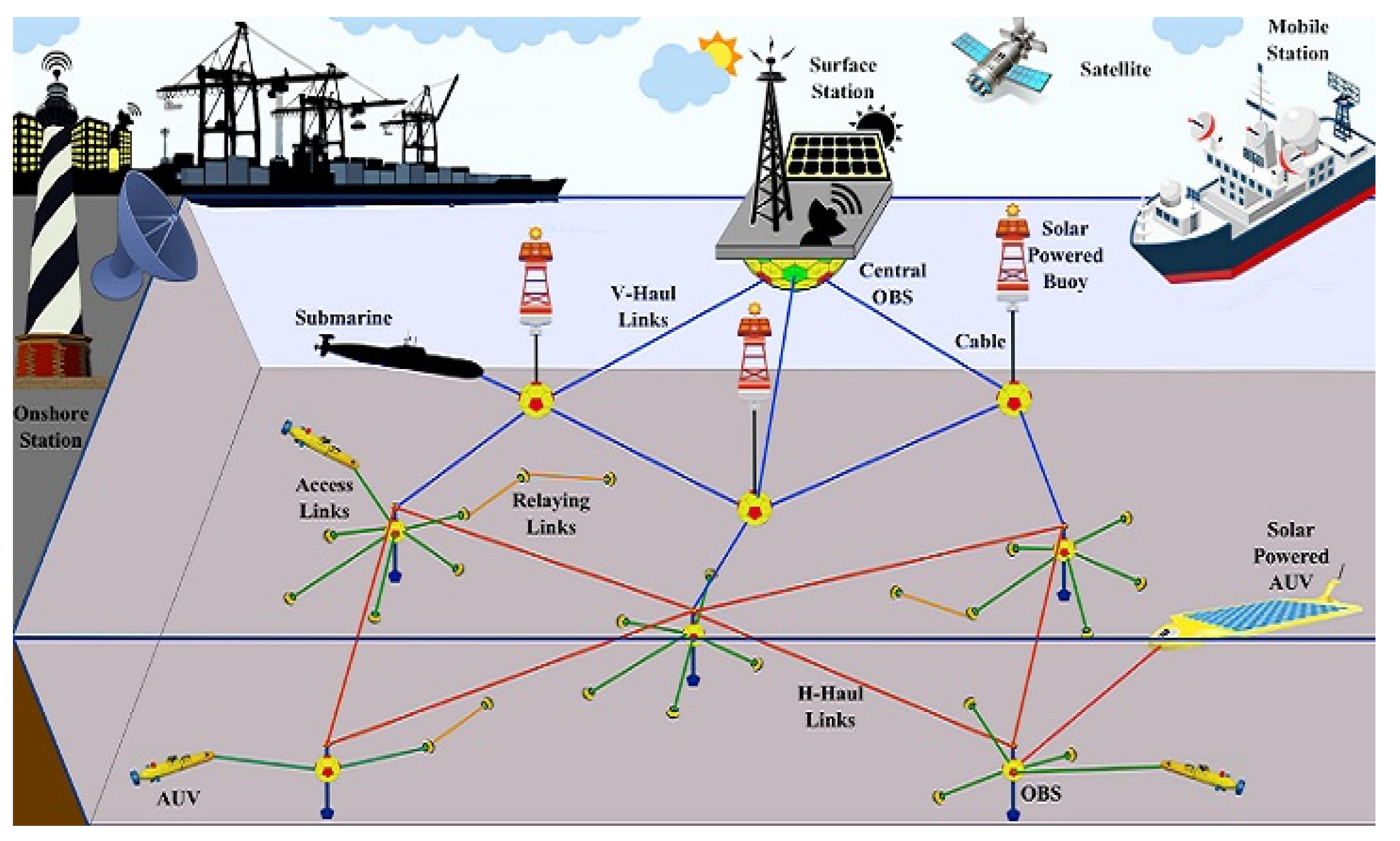
Figure 2. Underwater Sensor System Architecture.
Motivation and Contribution
USWNs, used to monitor the marine activities of marine species by using acoustic device networks, are preferred by researchers due to their self-organization and transmission. In this context, the choice of UWSN protocols can communicate information from one sensor to another to transmit maritime environmental conditions. The information gathered can then be utilized to create ecosystem models that can forecast changes in the undersea environment and climate changes. Such UWSNs have an application in monitoring seismic activities such as oil extraction from fields under the water. A 4D model is used to study the oil reservoir’s fluctuation over time to evaluate the oil field operation and apply ad hoc treatments. Onshore fields are often routinely monitored using permanent instruments on a daily, quarterly, or annual basis [9][10]. Conversely, sub-merged oil fields are more demanding because the deployment of sensors is not presently permanent in the oil fields underwater.
2. Underwater Sensor’s Internal Structure
The internal components of a submerged or acoustically isolated sensor organize include the CPU-on-board control, sensor interface HW, acoustic modem, memory, power supply, and sensor. Every application of an acoustically isolated sensor contains these parts, which comprise most of the main body.
The primary control is linked to the sensor via a sensor interface circuitry [11]. The CPU or control collects the sensor’s data, stores them in memory, analyzes them, and then sends them via an acoustic modem to other sensors is shown in the Figure 3. Occasionally, bottom-mounted instrument frames are designed to authorize unidirectional messages to protect all sensor components from potential trawling gear damage [12].
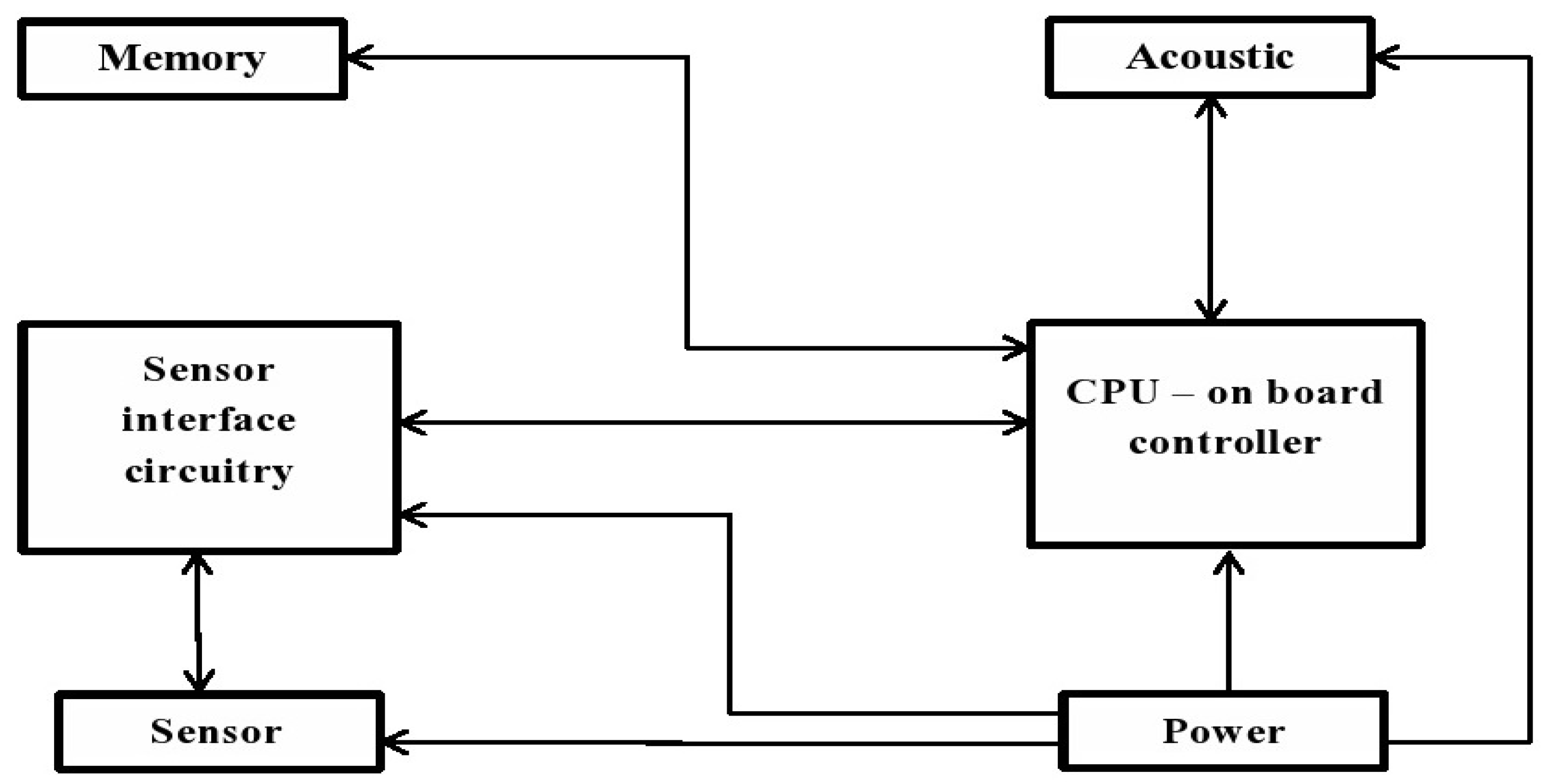
Figure 3. Submerged sensor’s internal structure.
Submerged acoustic message channels are centrally influenced by factors such as water heat, commotion, multi-path, Doppler spread, and sign lessening. Every one of these components causes a high-piece mistake and a deferred change [13]. Accordingly, message connections in UWSNs are particularly blunder-inclined. Additionally, sensor hubs are mostly powerless in cruel, submerged conditions. In contrast, their earthly, submerged systems have a higher hub disappointment rate and parcel misfortune likelihood [14]. UWSNs are generally sent in a three-dimensional space. This situation is different from the two-dimensional sending of most earthly sensor systems. These qualities of submerged sensors raise numerous crisp difficulties and make the current directing conventions for earthbound sensor systems unsatisfactory here. For UWSNs, the directing conventions ought to have the option of dealing with the hub versatility and the unreliable message joins with high vitality proficiencies [15].
3. Parameters Influencing the Propagation of UWSN
The process of converting acoustic energy into heat becomes more efficient as distance and frequency rise. Its applications include scattering, reverberation, refraction, and dispersion. In contrast to horizontal channels, which can have extremely long multi-path spreads, vertical channels have restricted time dispersion, which is limited by the water depth, high delay, and high variance in delay.
-
The throughput of the framework is severely decreased by the underwater acoustic channels’ engendering speed, which is five significant degrees slower than that of the radio channel.
-
It degrades the exhibition of advanced correspondences due to the Doppler spread. Correspondences with high information rates make different neighboring images medal at the recipient, which requires modern signs; it degrades the exhibition of standard correspondence conventions.
-
To ensure trustworthy data delivery from sensor nodes to sink, two-hop provides a dynamic security paradigm. Which determines the ideal data packet size for effective data transport in the two-hop paradigm. Two-hop routing to boost wireless sensor network communication performance are tabulated in the Table 1.
- ○
-
Data Transmission Dynamic security
- ○
-
Bandwidth Aggregation
- ○
-
Load balance transmission
- ○
-
Congestion-free transmission
- ○
-
Low latency transmission
Table 1. Findings of propagation of UWSN.
| S.no | Area Focused | Findings | Metrics |
|---|---|---|---|
| 1 | Difficulties with UWSN routing and upcoming work | The speed of sound rises with rising ocean temperature and falls with falling ocean temperature; an increase in ocean temperature of 10C can bring the sound speed up to almost 4.0 m/s. | as the temperature rises |
| 2 | Wireless Communication Prospects and Challenges for Underwater Sensor Networks | Temperature differences, surface noise, and the multi-path effect due to reflection and refraction all have an impact on auditory communication. | Communication’s effects |
| 3 | An analysis of how temperature changes affect underwater wireless audio transmission | Temperature, depth, and salinity of the undersea environment all have an impact on sound speed. These elements cause changes in the sound speed in the water. | varying the speed |
| 4 | The underwater audio communication channel’s capacity might vary depending on the depth and temperature. | Larger temperatures and depths result in higher channel capacities and throughput rates when computing the acoustic channel capacity over short distances. | expanding throughput |
| 5 | Simulation of an underwater channel | The temperature at the sea’s surface is substantially higher than the temperature at the bottom. As depth, salinity, and temperature increase, so does the sound’s velocity. | grows when the temperature rises |
References
- Bhanumathi, S.; Rajkishore, S.; Kowshik, S. Localized aided energy efficient optimal relay selection protocol for underwater wireless sensor networks. In Proceedings of the 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 23–25 April 2019; pp. 880–885.
- Almutairi, A.; Mahfoudh, S. Deployment Protocol for Underwater Wireless Sensors Network based on Virtual Force. Int. J. Adv. Comput. Sci. Appl. 2017, 8, 241–249.
- Blidberg, D.R. The development of autonomous underwater vehicles (auv); a brief summary. IEEE ICRA 2001, 4, 1–12.
- Alsulami, M.; Elfouly, R.; Ammar, R.; Alenizi, A. A modified k-medoids algorithm for de- ploying a required number of computing systems in a three dimensional space in underwater wireless sensor networks. In Proceedings of the 2020 IEEE International Symposium on Signal Processing and Information Technology (IS-SPIT), Louisville, KY, USA, 9–11 December 2020; pp. 1–5.
- Cv, R.; Sathish, K. Performance Analysis of Clustered Based Underwater Wireless Sensor Network by Deploying Application as CBR. In Proceedings of the 2022 Third International Conference on Intelligent Computing Instrumentation and Control Technologies (ICICICT), Kannur, India, 11–12 August 2022; pp. 1678–1686.
- Alsulami, M.; Elfouly, R.; Ammar, R. A reliable underwater computing system. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; pp. 467–472.
- Collins, A. Application of subsea wireless technology to environmental monitoring. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–5.
- Stojanovic, M. Acoustic (underwater) communications. In Encyclopedia of Telecommunications; Wiley: Hoboken, NJ, USA, 2019.
- Maindalkar, A.; Ansari, S.M. Design of Robotic Fish for Aquatic Environment Monitoring. Int. J. Comput. Appl. 2015, 117, 31–34.
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.; Qaisar, S. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832.
- Bagadi, K.; Ravikumar, C.V.; Sathish, K.; Alibakhshikenari, M.; Virdee, B.S.; Kouhalvandi, L.; Olan-Nuñez, K.N.; Pau, G.; See, C.H.; Dayoub, I.; et al. Detection of signals in MC-CDMA using a novel IBDFE, Institute of Electrical and Electronics Engineers. IEEE Access 2022, 10, 105674–105684.
- Zhou, R.; Chen, J.; Tan, W.; Cai, C. Sensor Selection for Optimal Target localization with 3-D Angle of Arrival Estimation in Underwater Wireless Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 245.
- Bouabdallah, F.; Zidi, C.; Boutaba, R. Joint routing and energy management in underwater acoustic sensor networks. IEEE Trans. Netw. Serv. Manag. 2017, 14, 456–471.
- Kilfoyle, D.B.; Baggeroer, A.B. The state of the art in underwater acoustic telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27.
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.2K
Revisions:
2 times
(View History)
Update Date:
19 Jan 2023
Table of Contents




Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No