 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Józef Andrzej Lisowski | -- | 1568 | 2023-01-04 11:55:34 | | | |
| 2 | Rita Xu | Meta information modification | 1568 | 2023-01-05 02:39:11 | | | | |
| 3 | Rita Xu | -32 word(s) | 1536 | 2023-01-06 08:00:34 | | |
Video Upload Options
This research presents a combination of remote sensing, an artificial neural network, and game theory to synthesize a system for safe ship traffic management at sea. Serial data transmission from the ARPA anti-collision radar system are used to enable computer support of the navigator’s maneuvering decisions in situations where a large number of ships must be passed.
1. Introduction
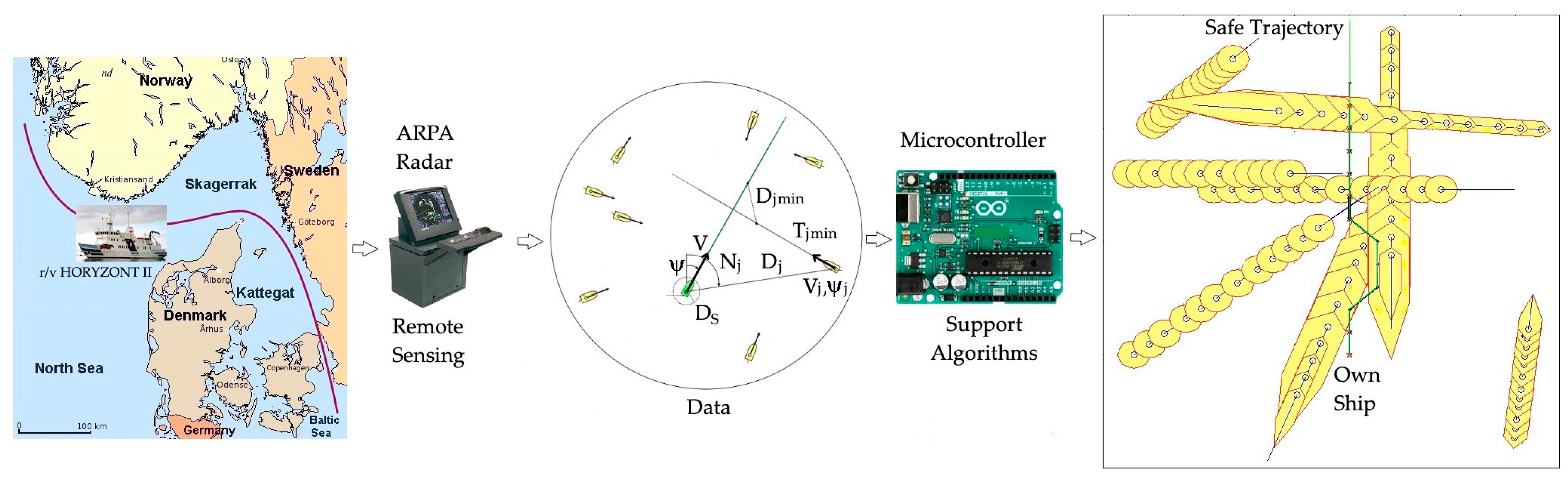
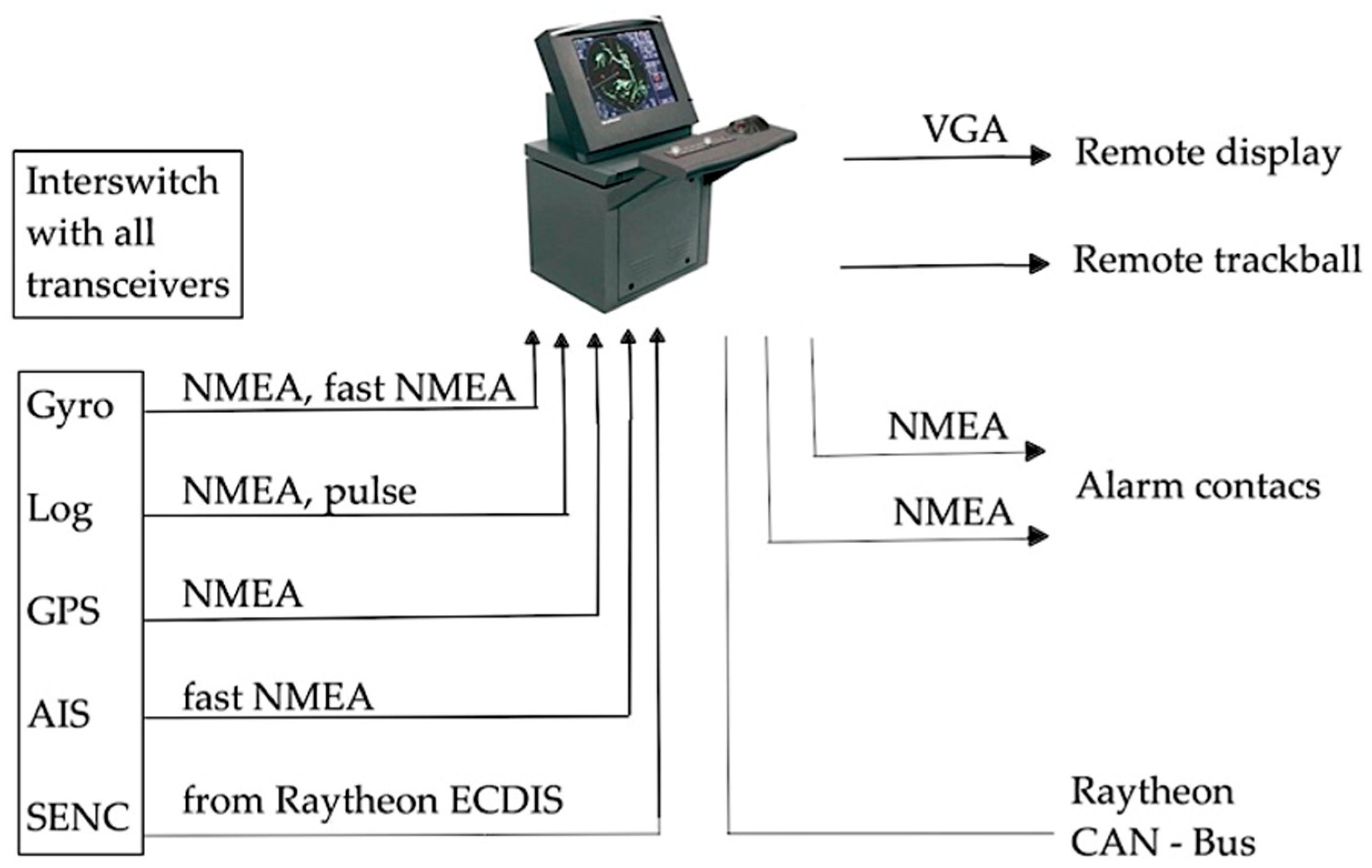
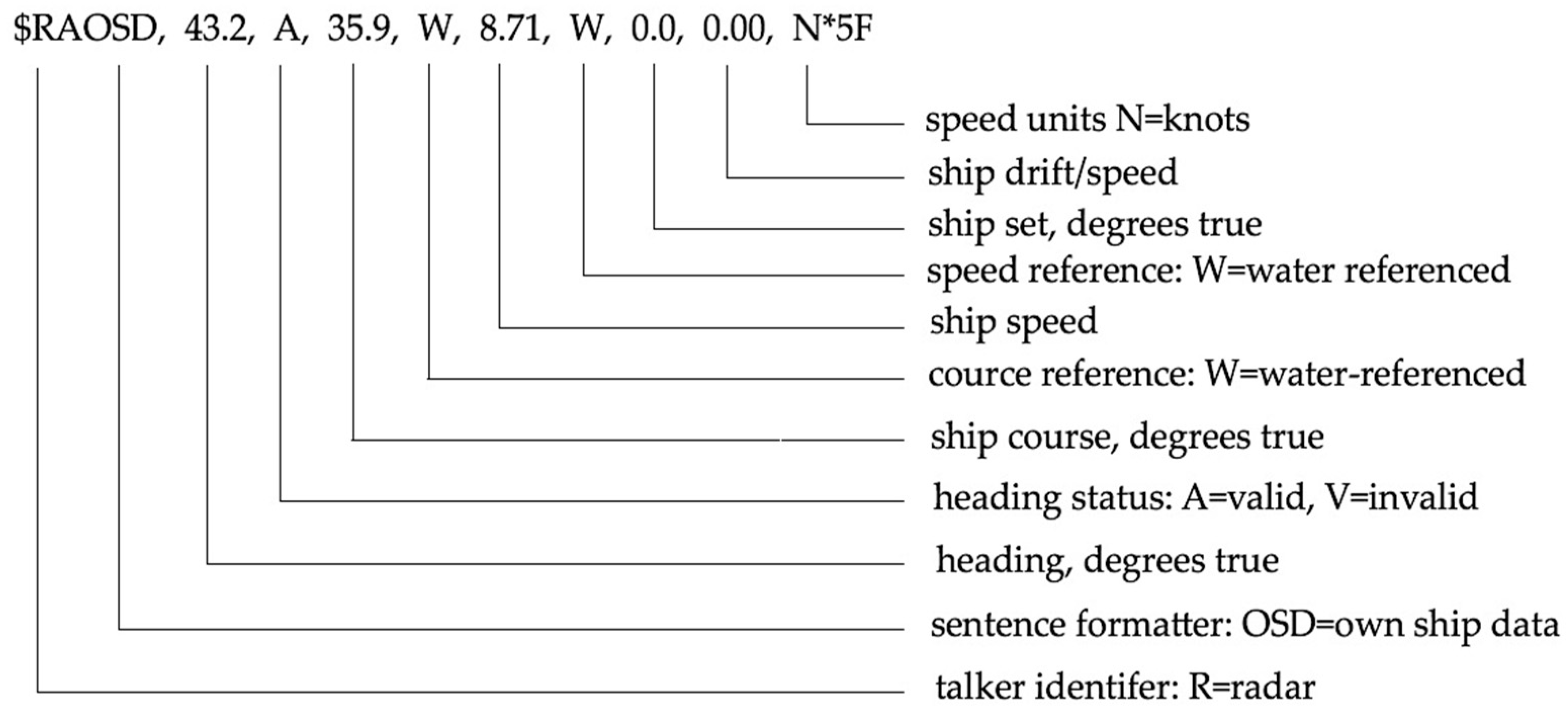
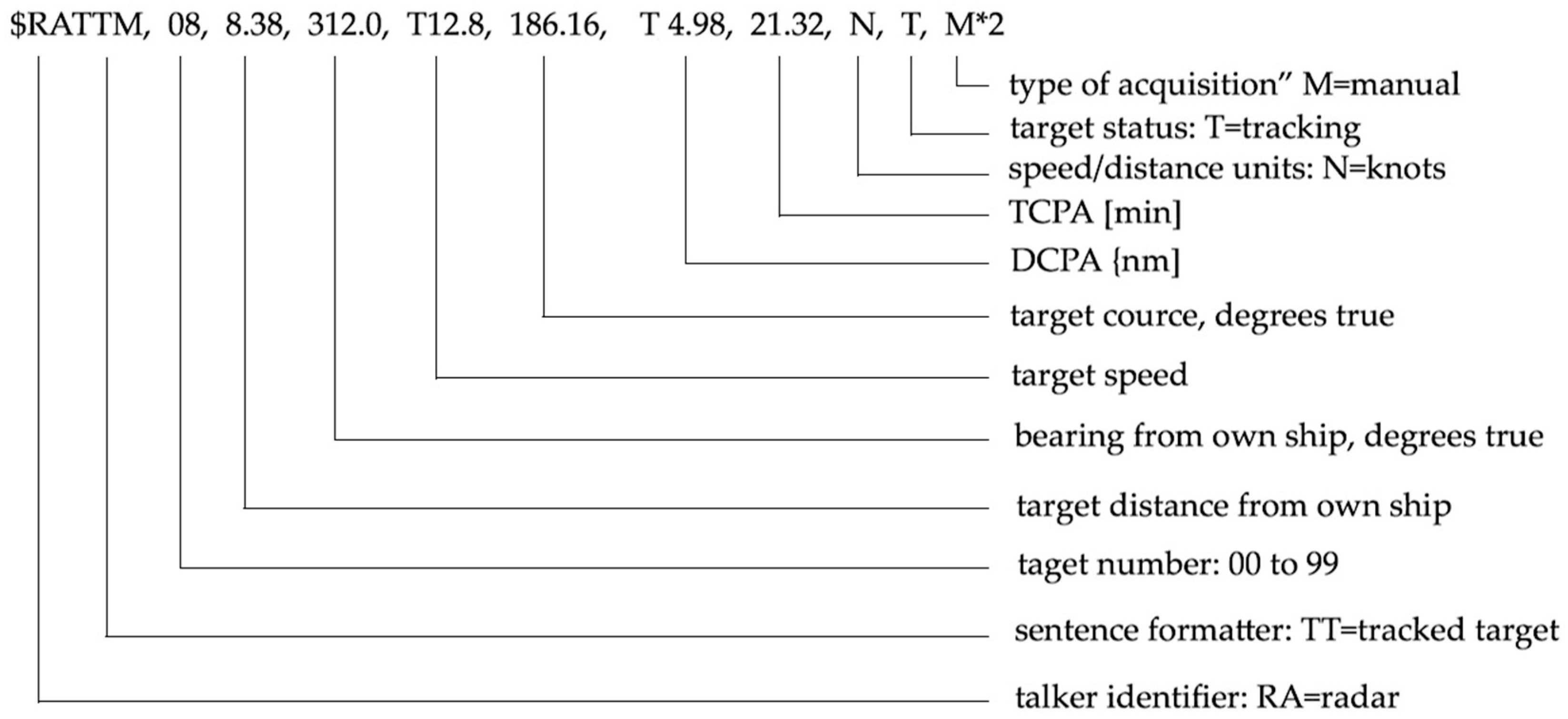
2. Marine Environment Remote Sensing Using a Radar ARPA System
- Artificial Intelligence Methods in the Synthesis of Safe Control Algorithms in a Marine Environment
To ensure safe navigation, ships are required to respect the rules of COLREGs. However, these rules are limited to only two vessels under good conditions and restricted visibility at sea. These rules, moreover, only give recommendations of a general nature and are not able to cover all of the necessary conditions for the actual process [18].
Thus, the actual process of ships passing each other often takes place under conditions of indeterminacy and conflicts with the inexact cooperation of ships in accordance with COLREGs. Therefore, it is advisable to present the process and develop and test, for practical purposes, methods of safe ship control using elements of game theory.
Several studies have indicated that in order to take into account the possible maneuvering strategies of passing ships and their dynamic properties, it is best to use a description of this control process in a differential game model.
For the synthesis of control algorithms, models simplifying the complex differential game model and artificial intelligence models are used. On the basis of such approximate models, appropriate algorithms for computer-aided maneuvering decisions of the navigator under collision situations are synthesized (Table 1).
Table 1. Types of algorithms for determining the ship’s safe trajectory in a collision situation at sea.
|
Artificial Intelligence Method |
Control Synthesis Method |
Algorithm |
|
Artificial Neural Network |
Dynamic Programming |
Dynamic Trajectory DT |
|
Positional Game |
Triple Linear Programming |
Game Positional Trajectory GPT |
|
Matrix Game |
Dual Linear Programming |
Game Risk Trajectory GRT |
|
Multi-stage optimization |
Linear Programming |
Kinematic Trajectory KT |
References
- Lazarowska, A. Safe Trajectory Planning for Maritime Surface Ships; Springer: Berlin/Heidelberg, Germany, 2022; Volume 13, pp. 1–185.
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV-UAV Systems: 3D Mapping Guidance and Adaptive Fuzzy Control. IEEE Trans. Control. Netw. Syst. 2022, 11, 1–11.
- Zhong, S.; Wen, Y.; Huang, Y.; Cheng, X.; Huang, L. Ontological Ship Behavior Modeling Based COLREGs for Knowledge Reasoning. J. Mar. Sci. Eng. 2022, 10, 203.
- Kim, H.-G.; Yun, S.-J.; Choi, Y.-H.; Ryu, J.-K.; Suh, J.-H. Collision Avoidance Algorithm Based on COLREGs for Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2021, 9, 863.
- Zhang, G.; Li, J.; Liu, C.; Zhang, W. A robust fuzzy speed regulator for unmanned sailboat robot via the composite ILOS guidance. Nonlinear Dyn. 2022, 110, 2465–2480.
- Zhou, X.; Huang, J.; Wang, F.; Wu, Z.; Liu, Z. A Study of the Application Barriers to the Use of Autonomous Ships Posed by the Good Seamanship Requirement of COLREGs. J. Navig. 2020, 73, 710–725.
- Lebkowski, A. Evolutionary methods in the management of vessel traffic. In Proceedings of the International Conference on Marine Navigation and Safety of Sea Transportation, Gdynia, Poland, 17–19 June 2015; pp. 259–266.
- Borkowski, P. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors 2017, 17, 1432.
- Tomera, M. Ant Colony Optimization Algorithm Applied to Ship Steering Control. 18th Annual International Conference on Knowledge-Based and Intelligent Information and Engineering Systems KES, Gdynia, Poland. Procedia Comput. Sci. 2014, 35, 83–92.
- Pietrzykowski, Z.; Wołejsza, P. Decision support system in marine navigation. In Challenge of Transport Telematics, Proceedings of the 16th International Conference on Transport Systems Telematics, Katowice-Ustroń, Poland, 16–19 March 2016; Springer: Berlin/Heidelberg, Germany, 2016; Volume 640, pp. 462–474.
- Ożoga, B.; Montewka, J. Towards a decision support system for maritime navigation on heavily trafficked baśni. Ocean Eng. 2018, 159, 88–97.
- Aylward, K.; Weber, R.; Lundh, M.; MacKinnin, S.N.; Dahlman, J. Navigators’ views of a collision avoidance decision support system for maritime navigation. J. Navig. 2022, 75, 1035–1048.
- Szlapczynski, R.; Szlapczynska, J. A method of determining and visualizing safe motion parameters of a ships navigating in restricted waters. Ocean. Eng. 2017, 129, 363–373.
- Hongguang, L.; Yong, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 12, 2592.
- Wei, D.; Langxiong, G.; Chunhui, Z.; Yuanzhou, Z.; Mingjuan, L.; Lei, Z. Study on Path Planning of Ship Collision Avoidance in Restricted Water base on AFS Algorithm. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; pp. 1–7.
- Dinh, G.H.; Im, N.K. Study on the Construction of Stage Discrimination Model and Consecutive Waypoints Generation Method for Ship’s Automatic Avoiding Action. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 294–306.
- Hinostroza, M.A.; Xu, H.; Soares, C.G. Cooperative operation of autonomous surface vehicles for maintaining formation in complex marine environment. Ocean Eng. 2019, 183, 132–154.

