 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Mohd Azman Abas | + 2067 word(s) | 2067 | 2022-02-08 07:54:57 | | | |
| 2 | Conner Chen | + 341 word(s) | 2408 | 2022-02-17 03:32:53 | | |
Video Upload Options
Numerous countries have developed guidelines for public road testing, but those rules are not uniform, and discrepancies occur between nations. Issues such as vehicular safety, registrations, authority, insurance, cybersecurity, and infrastructures weigh differently in each country. Rather than relying on a single national standard as a reference, an amalgam of guidelines from different countries allows a more holistic and measured view of AV testing practices. Synthesizing these diverse national regulations into global guidelines would promote the safety and sustainability of autonomous vehicle testing and benefit all parties interested in autonomous vehicles.
1. Introduction
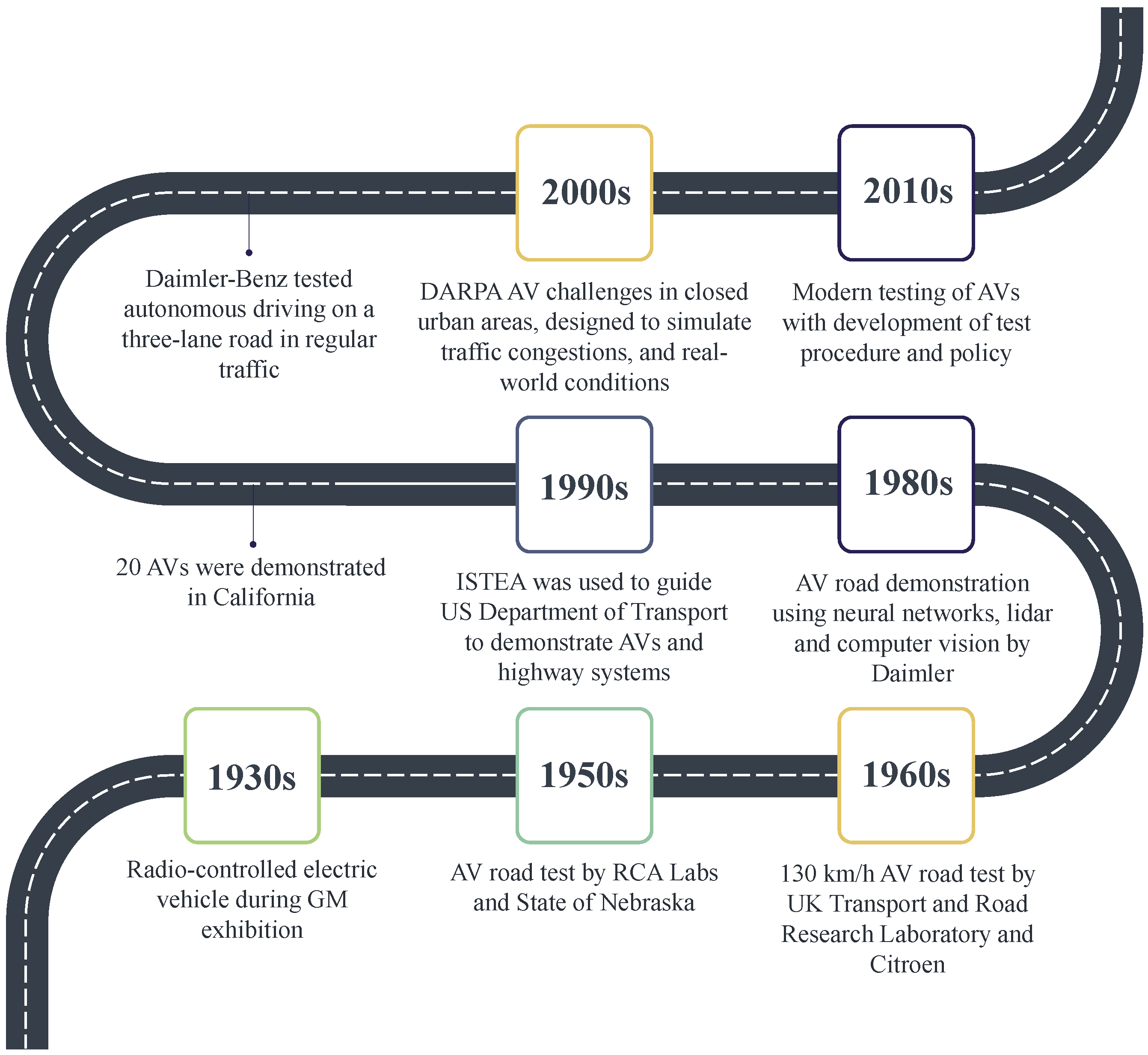
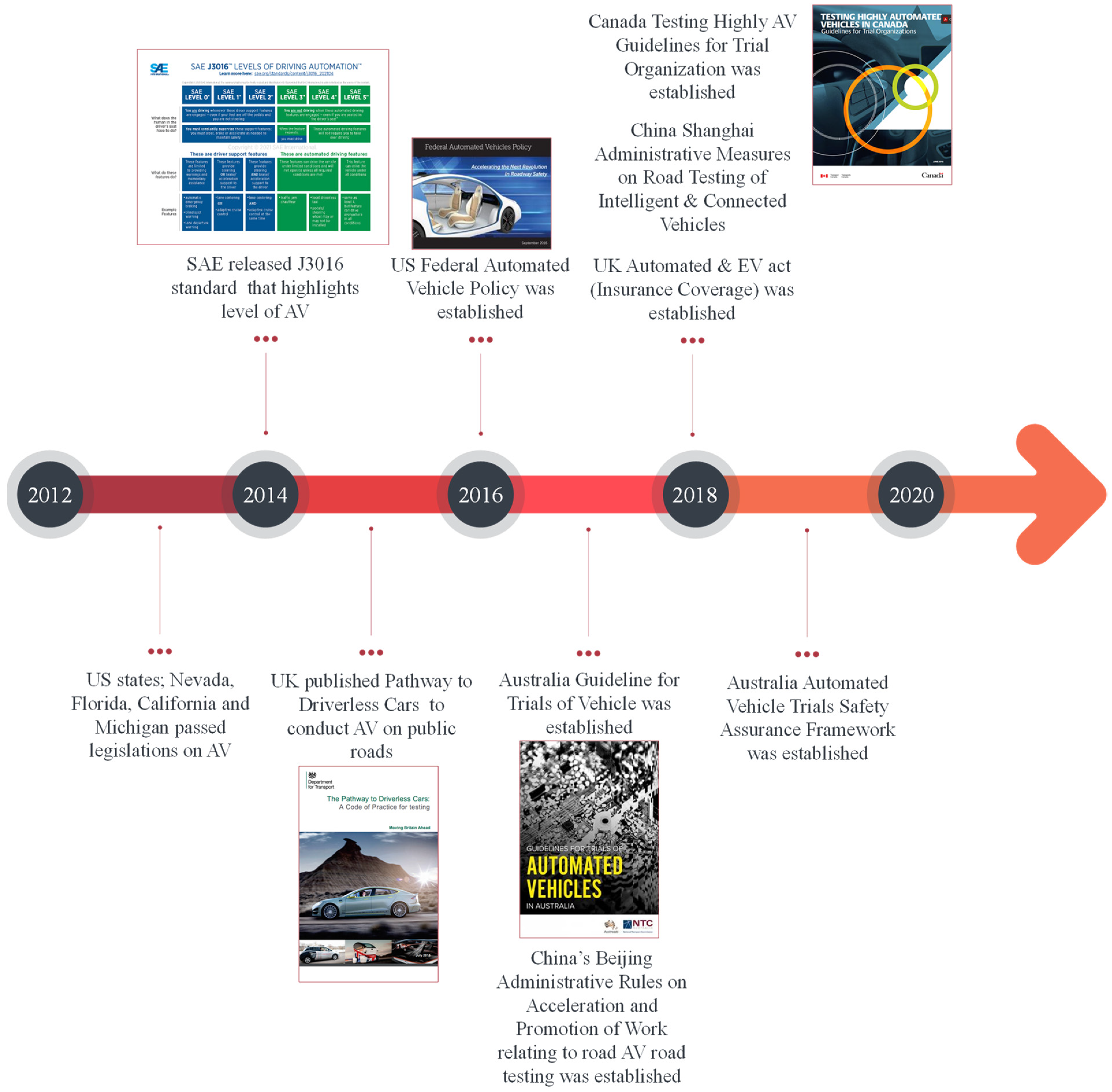
2. Background
3. AV Public Road-Testing Guidelines
AV testing guidelines provide recommendations to testing organisation and authorities on standards and practices they should consider and apply when planning and conducting public road testing. As mentioned earlier, this study examined the guidelines for AV public road testing from Australia, Canada, and United Kingdom, with a particular focus on (1) Preparation (preliminary activities before the testing), (2) Testing, (practices during the testing) and (3) Post-Testing (reporting and data management). Highlights of guidelines from Australia, Canada, and the United Kingdom, are listed in Table 1. The findings from the review of these guidelines are used to develop a synthesis.
Table 1. Highlights of guidelines from Australia, Canada, and the United Kingdom.
| Subject | Australia | Canada | United Kingdom |
|---|---|---|---|
| Approvals and permits | Follow the regulations of local authorities and the policies mentioned in the guideline. May conduct trial without requiring permit which depends largely on the local authorities. |
Obtained appropriate authorisation from the local authorities. Compliance with each jurisdiction is required when testing. | Obey all traffic laws such as MOT test, Road Traffic Act 1988, Highway Code. |
| Safety requirements |
Map out routes and describe Operational Design Domain (ODD). Explain technology being tested to authorities. Sufficient closed-track testing of technologies. Establish a Traffic Management Plan. | Sufficient closed-track testing of technologies. Communication plan for the public. Notification to local authorities. Automation and manual mode switch. |
Can be tested anywhere on public roads. Stability of technology must be tested and proven. Sufficient closed track testing. Automation and manual mode switch. |
| Data collection, storage, and security |
Information such as time, date, location, automation status, traffic conditions, vehicle information, sensor detection, and the vehicle operator during the incident must be accessible. | Availability of data recording device that records technical information about the AV status and operations. | Fitted with a data recording device with a minimum frequency of 10 Hz. Include data such as driving modes, vehicle speed, steer and braking, and objects surrounding the vehicle. May include video and audio storage. |
| Test driver/operator | Does not need an operator in the vehicle, but real-time remote monitoring is necessary. | Must always require driver or remote operators. | Must always require driver or remote operators. |
| Insurance | Compulsory third-party insurance. Comprehensive vehicle insurance. Public liability insurance. Product liability insurance. Self-insurance. Work or occupational health and safety insurance. |
The minimum insured value of CAD 5 million in liability insurance, in the form and manner required by the MTA authority. Additional liability insurance for large seating capacity. | Anyone conducting tests of automated vehicles on public roads or in other public places must hold appropriate insurance or otherwise comply with the statutory requirements. |
| Reporting | Provide an initial report of the incident within 24 h. The full report, including the relevant data and information, must be provided within a week. Must submit a report to relevant agencies monthly for minor incidents. |
Preliminary report submitted within 24 h of an accident. | Give full cooperation with relevant authorities in the event of an investigation. |
References
- Cartenì, A. The acceptability value of autonomous vehicles: A quantitative analysis of the willingness to pay for shared autonomous vehicles (SAVs) mobility services. Transp. Res. Interdiscip. Perspect. 2020, 8, 100224.
- Yuen, K.F.; Chua, G.; Wang, X.; Ma, F.; Li, K.X. Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour. Int. J. Environ. Res. Public Health 2020, 17, 4419.
- Aoyama, Y.; Leon, L.F.A. Urban governance and autonomous vehicles. Cities 2021, 119, 103410.
- Shetty, A.; Yu, M.; Kurzhanskiy, A.; Grembek, O.; Tavafoghi, H.; Varaiya, P. Safety challenges for autonomous vehicles in the absence of connectivity. Transp. Res. Part C Emerg. Technol. 2021, 128, 103133.
- Taeihagh, A.; Lim, H.S. Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cyber-security, and industry risks. Transp. Rev. 2019, 39, 103–128.
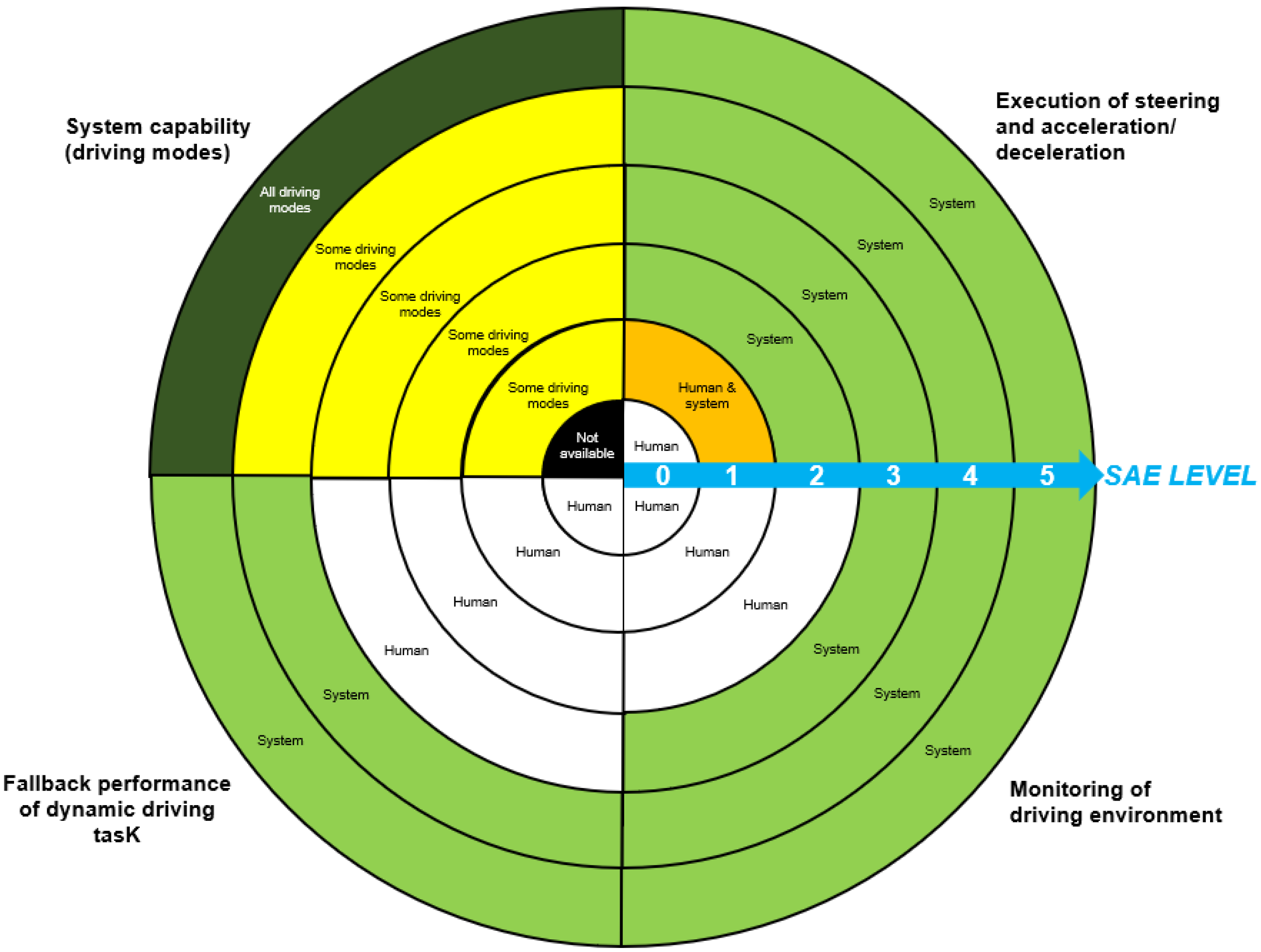
- SAE. SAE J3016: Levels of Driving Automation; SAE: Warrendale, PA, USA, 2017.
- Slovick, M. Worlds First Level 3 Self-Driving Production Car Now Available in Japan. 2021. Available online: https://www.electronicdesign.com/markets/automotive/article/21158656/electronic-design-worlds-first-level-3-selfdriving-production-car-now-available-in-japan (accessed on 9 September 2021).
- Hawkins, A.J. Waymo Gets the Green Light to Test Fully Driverless Cars in California. 2018. Available online: https://www.theverge.com/2018/10/30/18044670/waymo-fully-driverless-car-permit-california-dmv (accessed on 30 January 2021).
- Humphries, M. Germany Allows Intel to Test Self-Driving Vehicles at 80 mph. 2020. Available online: https://sea.pcmag.com/infotainment-systems/38232/germany-allows-intel-to-test-self-driving-vehicles-at-80mph (accessed on 30 January 2021).
- Husley, J. AV Testing Must Keep the Public on Side in Order for AV Testing to Remain a Practical Process. 2019. Available online: https://www.automotiveworld.com/articles/av-testing-must-keep-the-public-on-side/ (accessed on 5 February 2021).
- Gringer, B. History of the Autonomous Car. 2018. Available online: https://www.titlemax.com/resources/history-of-the-autonomous-car/#:~:text=History%20of%20Autonomous%20Cars,made%20this%20concept%20a%20reality (accessed on 6 February 2021).
- Hicks, N. Nebraska Tested Driverless Car Technology 60 Years Ago. 2018. Available online: https://journalstar.com/news/local/govt-and-politics/nebraska-tested-driverless-car-technology-years-ago/article_a702fab9-cac3-5a6e-a95c-9b597fdab078.html (accessed on 10 February 2021).
- Reynolds, J. Cruising into the Future. 2010. Available online: https://www.telegraph.co.uk/motoring/4750544/Cruising-into-the-future.html (accessed on 6 February 2021).
- Daimler. The Prometheus Project Launched in 1986: Pioneering Autonomous Driving. 2016. Available online: https://media.daimler.com/marsMediaSite/en/instance/ko/The-PROMETHEUS-project-launched-in-1986-Pioneering-autonomous-driving.xhtml?oid=13744534 (accessed on 13 April 2021).
- Lowrie, J.W.; Gremban, K.; Thomas, M.; Turk, M. The Autonomous Land Vehicle (ALV) Preliminary Road-Following Demonstration. Int. Soc. Opt. Photonics 1985, 579, 336–350.
- Bishop, R. Intelligent Vehicle Technologies and Trend; Artech House: Boston, MA, USA, 2005.
- Thrun, S. Toward Robotic Cars. Commun. ACM 2010, 53, 99–106.
- Harris, M. How Googles Autonomous Car Passed the First U.S. State Self-Driving Test. 2014. Available online: https://spectrum.ieee.org/transportation/advanced-cars/how-googles-autonomous-car-passed-the-first-us-state-selfdriving-test (accessed on 14 April 2021).
- Nothdurft, T.; Hecker, P.; Saust, F.; Maurer, M.; Bohmer, J.R.; Ohl, S.; Reschka, A. Stadtpilot: First fully autonomous test drives in urban traffic. In Conference Record—IEEE Conference on Intelligent Transportation Systems; Technische Universitat Braunschweig: Braunschweig, Germany, 2011; pp. 919–924.
- Markoff, J. Google Cars Drive Themselves, in Traffic. 2010. Available online: https://www.nytimes.com/2010/10/10/science/10google.html (accessed on 14 April 2021).
- Ryan, C. Nevada Issues Google First License for Self-Driving Car. 2012. Available online: https://lasvegassun.com/news/2012/may/07/nevada-issues-google-first-license-self-driving-ca/ (accessed on 9 March 2021).
- NELIS. Revises Certain Provisions Governing Transportation; (BDR 43-1109), AB511; Nevada Legislature: Carson City, NV, USA, 2011.
- Oram, J. Governor Brown Signs California Driverless Car Law at Google HQ. 2012. Available online: https://brightsideofnews.com/governor-brown-signs-california-driverless-car-law-at-google-hq/ (accessed on 21 January 2021).
- Watts, J.M. Worlds First Self-Driving Taxis Hit the Road in Singapore. 2016. Available online: https://www.wsj.com/articles/worlds-first-self-driving-taxis-hit-the-road-in-singapore-1472102747 (accessed on 27 February 2021).
- OKane, S. Ontario Is the First Canadian Province to Allow Autonomous Vehicle Testing. 2015. Available online: https://www.theverge.com/2015/10/14/9532001/ontario-canada-self-driving-cars (accessed on 18 June 2021).
- Caughill, P. Canada Is Officially Testing Driverless Cars on Public Streets. 2017. Available online: https://futurism.com/canada-is-officially-testing-driverless-cars-on-public-streets (accessed on 4 May 2021).
- National Transport Commission. Guidelines for Trials of Automated Vehicles in Australia 2020; National Transport Commission: Melboune, Australia, 2020.
- Department for Transport. The Pathway to Driverless Cars: A Code of Practice for Testing; Department for Transport: London, UK, 2019.

