 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Sepideh Ghodrat | + 4582 word(s) | 4582 | 2021-09-19 15:06:45 | | | |
| 2 | Conner Chen | Meta information modification | 4582 | 2021-10-08 08:45:46 | | | | |
| 3 | Lindsay Dong | Meta information modification | 4582 | 2021-10-09 11:36:53 | | |
Video Upload Options
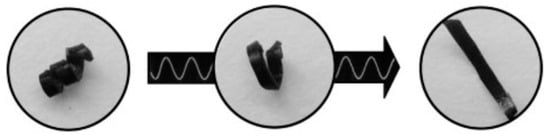
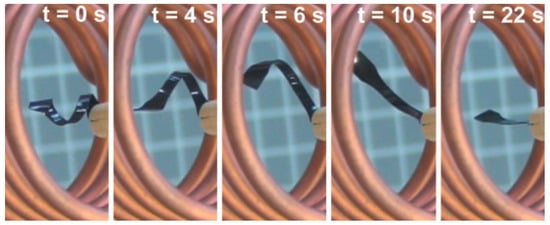
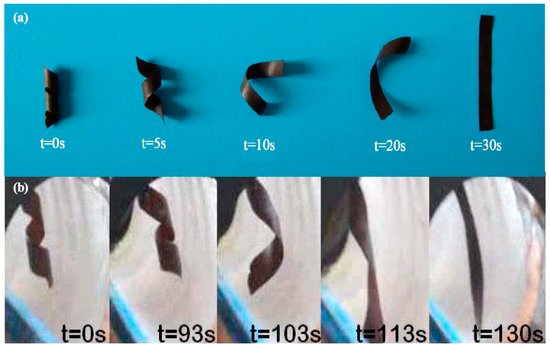
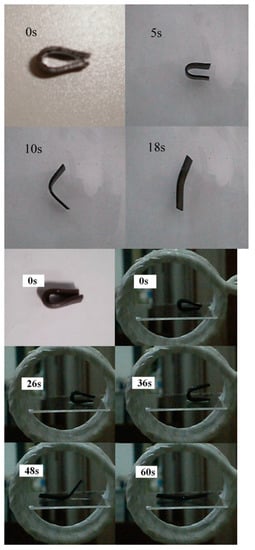
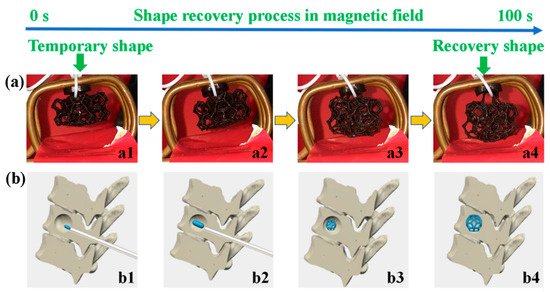
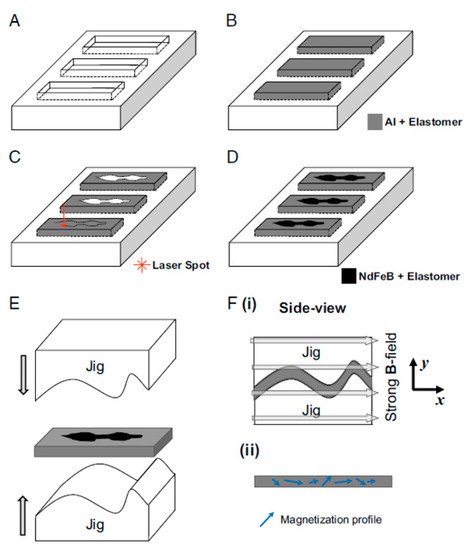
Magnetic shape memory polymers (MSMPs) belong to the group of shape memory materials, a group that can change their shape back to their “remembered” shape when they are exposed to a stimulus. MSMPs are essentially shape memory polymers whose shape memory effect is stimulated by heat. In the case of the MSMPs, magnetic particles are incorporated in the shape memory polymer. When the material is placed in an external alternating magnetic field, the magnetic particles heat up due to induction heating. The heated particles heat the shape memory polymer from the inside and when the activation temperature is reached, the shape memory effect is activated. Magnetic soft materials (MSMs) exist out of an elastomer with incorporated magnetic particles. The magnetic fields of these magnetic particles are set in specific magnetization patterns inside the elastomer during the fabrication process. When the magnetic soft material is placed inside an external static magnetic field, the magnetic fields of the magnetic particles align with the external magnetic field. This creates micro torques in the elastomer and pulls the elastomer matrix in a programmed shape.
1. MSMP Filled with Magnetic Fillers
1.1. MSMPs Filled with Fe3O4

1.2. MSMP Filled with NdFeB
1.3. MSMP Filled with Carbonyl Iron
1.4. MSMP Filled with Nickel Zinc Ferrite
1.5. MSMP Filled with Ni-Mn-Ga
1.6. MSMP Filled with Magnetite
1.7. MSMP Filled with Iron
1.8. MSMP Filled with Magnetite or Iron Oxide
2. MSM
References
- Schmidt, A.M. Electromagnetic Activation of Shape Memory Polymer Networks Containing Magnetic Nanoparticles. Macromol. Rapid Commun. 2006, 27, 1168–1172.
- Massart, R.; Cabuil, V. Synthèse en milieu alcalin de magnétite colloïdale: Contrôle du rendement et de la taille des particules. J. De Chim. Phys. 1987, 84, 967–973.
- Mohr, R.; Kratz, K.; Weigel, T.; Lucka-Gabor, M.; Moneke, M.; Lendlein, A. Initiation of shape-memory effect by inductive heating of magnetic nanoparticles in thermoplastic polymers. Proc. Natl. Acad. Sci. USA 2006, 103, 3540–3545.
- Leng, J.S.; Lan, X.; Liu, Y.J.; Du, S.Y.; Huang, W.M.; Liu, N.; Phee, S.J.; Yuan, Q. Electrical conductivity of thermoresponsive shape-memory polymer with embedded micron sized Ni powder chains. Appl. Phys. Lett. 2008, 92, 014104.
- Yakacki, C.M.; Satakar, N.S.; Call, K.; Likos, R.; Hilt, J.Z. Shape-Memory Polymer Networks with Fe3O4 Nanoparticles for Remote Activation. J. Appl. Polym. Sci. 2009, 112, 3166–3176.
- Razzaq, M.Y.; Anhalt, M.; Frormann, L.; Weidenfeller, B. Thermal, electrical and magnetic studies of magnetite filled polyurethane shape memory polymers. Mater. Sci. Eng. 2007, 444, 227–235.
- Yu, X.; Zhou, S.; Zheng, X.; Guo, T.; Xiao, Y.; Song, B. A biodegradable shape-memory nanocomposite with excellent magnetism sensitivity. Nanotechnology 2009, 20, 235702.
- Weigel, T.; Mohr, R.; Lendlein, A. Investigation of parameters to achieve temperatures required to initiate the shape-memory effect of magnetic nanocomposites by inductive heating. Smart Mater. Struct. 2009, 18, 025011.
- Kumar, U.N.; Kratz, K.; Wagermaier, W.; Behl, M.; Lendlein, A. Non-contact actuation of triple-shape effect in multiphase polymer network nanocomposites in alternating magnetic field. J. Mater. Chem. 2010, 20, 3404–3415.
- Yang, D.; Huang, W.; He, X.; Xie, M. Electromagnetic activation of a shape memory copolymer matrix incorporating ferromagnetic nanoparticles. Polym. Int. 2012, 61, 38–42.
- Cai, Y.; Jian, J.-S.; Zheng, B.; Xie, M.-R. Synthesis and properties of magnetic sensitive shape memory Fe3O4/poly(ε-caprolactone)-polyurethane nanocomposites. J. Appl. Polym. Sci. 2012, 12, 49–56.
- Yu, K.; Westbrook, K.K.; Kao, P.H.; Leng, J.; Qi, H.J. Design considerations for shape memory polymer composites with magnetic particles. J. Compos. Mater. 2012, 47, 51–63.
- Liu, C.; Huang, J.; Yuan, D.; Chen, Y. Design of a High-Strength XSBR/Fe3O4/ZDMA Shape-Memory Composite with Dual Response. Ind. Eng. Chem. Res. 2018, 57, 14527–14534.
- Zhang, F.; Wang, L.; Zheng, Z.; Liu, Y.; Leng, J. Magnetic programming of 4D printed shape memory composite structures. Compos. Part A Appl. Sci. Manuf. 2019, 125.
- Zhao, W.; Huang, Z.; Liu, L.; Wang, W.; Leng, J.; Liu, Y. Porous bone tissue scaffold concepts based on shape memory PLA/Fe3O4. Compos. Sci. Technol. 2021, 203, 108563.
- Golbang, A.; Kokabi, M. Magnetic Field Actuation of Shape Memory Nanocomposites. Adv. Mater. Res. 2010, 123–125, 999–1002.
- Hassan, R.U.; Jo, S.; Seok, J. Fabrication of a functionally graded and magnetically responsive shape memory polymer using a 3D printing technique and its characterization. J. Appl. Polym. Sci. 2018, 135, 45997.
- Buckley, P.R.; McKinley, G.H.; Wilson, T.S.; Small, W.; Bennett, W.J.; Bearinger, J.P.; McElfresh, M.W.; Maitland, D.J. Inductively Heated Shape Memory Polymer for the Magnetic Actuation of Medical Devices. IEEE Trans. Biomed. Eng. 2006, 53, 2075–2083.
- Zhang, D.; Liu, Y.; Leng, J. Magnetic field activation of SMP networks containing micro nickel (Ni) powder. In Proceedings of the Second International Conference on Smart Materials and Nanotechnology in Engineering, Weihai, China, 8–11 July 2009.
- Aaltio, I.; Nilsén, F.; Lehtonen, J.; Ge, Y.; Spoljaric, S.; Seppälä, J.; Hannula, S.-P. Magnetic Shape Memory—Polymer Hybrids. Mater. Sci. Forum 2016, 879, 133–138.
- Razzaq, M.Y.; Anhalt, M.; Frormann, L.; Weidenfeller, B. Mechanical spectroscopy of magnetite filled polyurethane shape memory polymers. Mater. Sci. Eng. 2007, 471, 57–62.
- Puig, J.; Hoppe, C.E.; Fasce, L.A.; Pérez, C.J.; Piñeiro-Rendondo, Y.; Bañobre-López, M.; López-Quintela, M.A.; Rivas, J.; Williams, R.J.J. Superparamagnetic Nanocomposites Based on the Dispersion of Oleic Acid-Stabilized Magnetite Nanoparticles in a Diglycidylether of Bisphenol A-Based Epoxy Matrix: Magnetic Hyperthermia and Shape Memory. J. Phys. Chem. C 2012, 116, 13421–13428.
- Cuevas, J.M.; Alonso, J.; German, L.; Iturrondobeitia, M.; Laza, J.M.; Vilas, J.L.; León, L.M. Magneto-active shape memory composites by incorporating ferromagnetic microparticles in a thermo-responsive polyalkenamer. Smart Mater. Struct. 2009, 18, 075003.
- Vialle, G.; Prima, M.D.; Hocking, E.; Gall, K.; Garmestani, H.; Sanderson, T.; Arzberger, S.C. Remote activation of nanomagnetite reinforced shape memory polymer foam. Smart Mater. Struct. 2009, 18, 115014.
- Lagcore, L.K.; Brand, O.; Allen, M.G. Magnetic microactuators based on polymer magnets. J. Microelectromechanical Syst. 1999, 8, 2–9.
- Khoo, M.; Liu, C. Micro magnetic silicone elastomer membrane actuator. Sens. Actuators A 2001, 89, 259–266.
- Kim, J.; Chung, S.E.; Choi, S.-E.; Lee, H.; Kim, J.; Kwon, S. Programming magnetic anisotropy in polymeric microactuators. Nat. Mater. 2011, 10, 747–752.
- Erb, R.M.; Sander, J.S.; Grisch, R.; Studart, A.R. Self-shaping composites with programmable bioinspired microstructures. Nat. Commun. 2013, 4, 1712.
- Lum, G.Z.; Ye, Z.; Dong, X.; Marvi, H.; Erin, O.; Hu, W.; Sitti, M. Shape-programmable magnetic soft matter. Proc. Natl. Acad. Sci. USA 2016, 113, E6007–E6015.
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279.
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4.
- Roh, S.; Okello, L.B.; Golbasi, N.; Hankwitz, J.P.; Liu, J.A.-C.; Tracy, J.B.; Velev, O.D. 3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfigurations. Adv. Mater. Technol. 2019, 4, 1800528.
- Lantean, S.; Barrera, C.; Pirri, C.F.; Tiberto, P.; Sangermano, M.; Roppolo, I.; Rizza, G. 3D Printing of Magnetoresponsive Polymeric Materials with Tunable Mechanical and Magnetic Properties by Digital Light Processing. Adv. Mater. Technol. 2019, 4, 1900505.
- Venkiteswaran, V.K.; Samaniego, L.F.P.; Sikorski, J.; Misra, S. Bio-Inspired Terrestrial Motion of Magnetic Soft Millirobots. IEEE Robot. Autom. Lett. 2019, 4, 1753–1759.
- Wu, S.; Ze, Q.; Zhang, R.; Hu, N.; Cheng, Y.; Yang, F.; Zhao, R. Symmetry-Breaking Actuation Mechanism for Soft Robotics and Active Metamaterials. Appl. Mater. Interfaces 2019, 11, 41649–44658.

