- Subjects: Agricultural Engineering
- |
- Contributors:
- Dário Pedro ,
- João P. Matos-Carvalho ,
- Fábio Azevedo ,
- Luis Bernardo ,
- Luis Miguel Campos ,
- Jose Fonseca ,
- André Mora
- UAV
- framework
- drones
- collision avoidance
- resilience
- artificial intelligence
- machine learning
- neuronal network
- deep learning
This video is adapted from 10.3390/rs12213533
We live in the ‘era’ of Unmanned Aircraft Systems (UAS), an all-encompassing term that includes the aircraft or the UAV, the ground-based controller (the person or software agent operating the machine), and the communications systems connecting the two [1]. Furthermore, new solutions are being proposed, allowing one to interconnect the different components of this system using cloud-oriented architecture [2].
Today, the UAVs are revolutionizing the world and businesses in a way that hardly anyone could have ever imagined [3][4]. This rapid evolution of UAVs and more importantly their commercial application in an ever-larger spectrum of scenarios, increases the need for safer and more reliable solutions [5][6][7][8]. At the same time, the incremental developments of sensing technologies (e.g., thermal, multispectral, and hyperspectral) in multiple areas may change parts of society by creating new solutions and applications [9][10][11][12][13].
In order to safely deploy UAVs in an urban environment, UAVs must reach the same level of reliability and safety as cars [14]. This level of safety and reliability must be assured regardless of the operation conditions and occurrence of unexpected events. This leads to the obvious conclusion that, just as for other autonomous vehicles, it is required to develop a collision avoidance architecture that is agnostic of the environment constrains, and is capable of finding solutions to unexpected events in real-time. The lack of such robust architectures has led to multiple disasters in the past [15][16][17][18][19][20][21], which will naturally increase with the expected exponential growth in the number of UAVs that will be deployed (both by consumers and companies). In this video, a robust architecture, part of a complete Framework for Fully Autonomous UAVs (FFAU) is proposed along with complete implementation (both software and hardware) that satisfy the functional and technical requirements of the proposed architecture. The increased safety of the proposed framework allows new and interesting usage scenarios such as the long distance remote control of UAVs. Furthermore, a novel Dynamic Collision Avoidance algorithm is proposed, which utilizes a Convolutional Neural Network (CNN) to extract features from video frames, and a Recursive Neural Network (RNN) that takes advantage of the video temporal characteristics capable of estimating if there is an incoming collision, such as the one depicted in Figure 1. This figure illustrates two frames from a video, retrieved from the ColANet dataset [22], that presents a kid kicking a ball into a UAV.
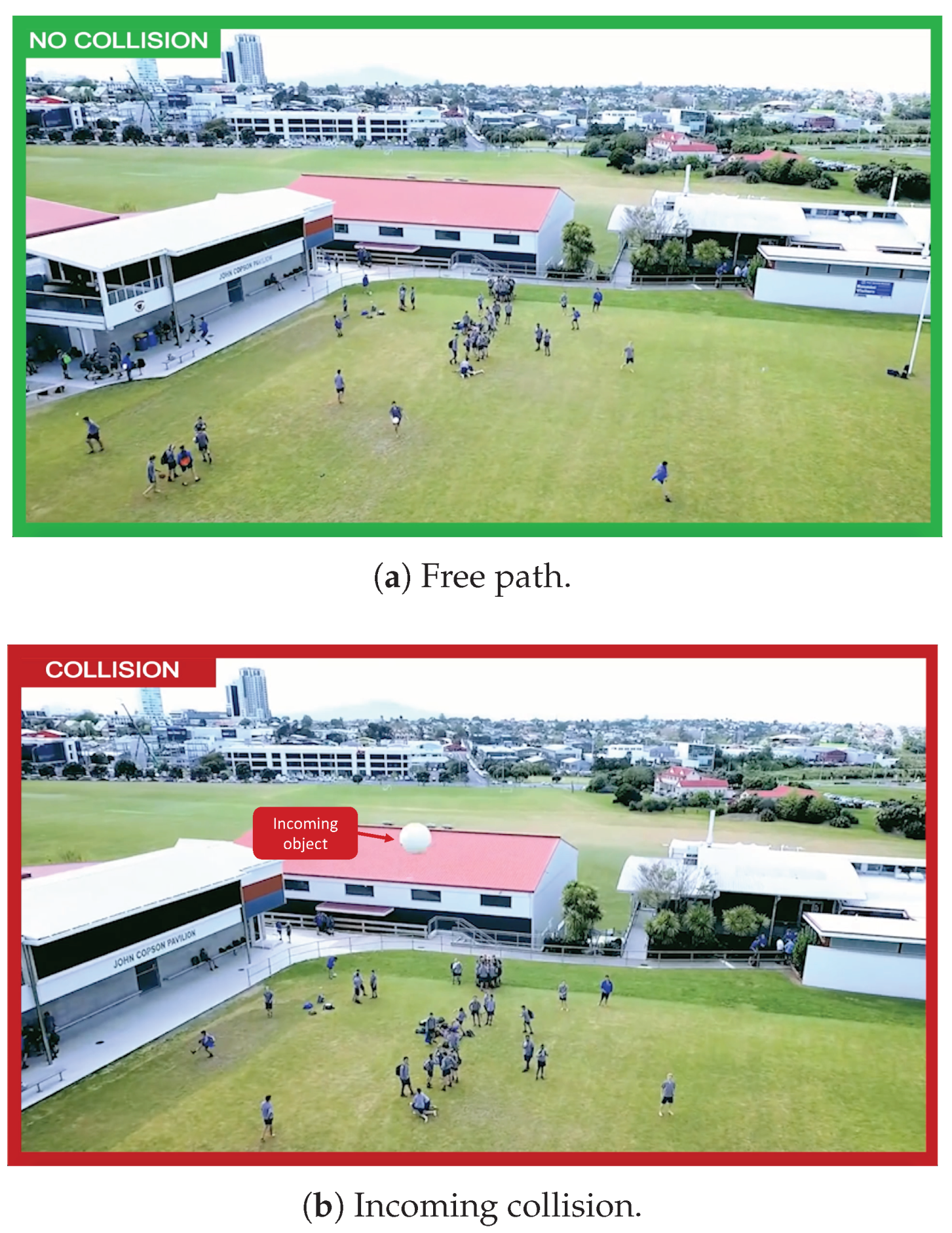
Figure 1. Novel Dynamic Collision Avoidance Detection. The images represent two frames from the same video, where a boy kicks a ball into a UAV.
There are quite a few attempts to integrate UAVs into an architecture that links different UAVs modules and a cloud platform. The architecture presented in [23] covers three main topics: Air traffic control network, cellular network, and the Internet. The layered architecture provides services for different UAV applications, such as surveillance or search and rescue. The video does not present any implementation of the proposed architecture and only outlines general concepts of the IoD (Internet-of-Drones), which later had a partial implementation [2]. Neither papers gave much importance to a key factor: The UAV itself. Contrarily, this video analyzes in greater depth the UAV functional blocks without disregarding the equally important cloud connection.
- Patias, P. Introduction to Unmanned Aircraft Systems. Photogramm. Eng. Remote. Sens. 2016, 82, 89–92.
- Koubaa, A.; Qureshi, B.; Sriti, M.F.; Javed, Y.; Tovar, E. A service-oriented Cloud-based management system for the Internet-of-Drones. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2017, Coimbra, Portugal, 26–28 April 2017.
- Alvarez-Vanhard, E.; Houet, T.; Mony, C.; Lecoq, L.; Corpetti, T. Can UAVs fill the gap between in situ surveys and satellites for habitat mapping? Remote Sens. Environ. 2020, 243, 111780.
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The application of Unmanned Aerial Vehicles (UAVs) to estimate above-ground biomass of mangrove ecosystems. Remote Sens. Environ. 2020, 242, 111747.
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634.
- Weibel, R.E.; Hansman, R.J. Safety Considerations for Operation of Unmanned Aerial Vehicles in the National Airspace System; MIT International Center for Air Transportation: Cambridge, UK, 2005.
- Zhong, Y.; Hu, X.; Luo, C.; Wang, X.; Zhao, J.; Zhang, L. WHU-Hi: UAV-borne hyperspdectral with high spatial resolution (H2) benchmark datasets and classifier for precise crop identification based on deep convolutional neural network with CRF. Remote Sens. Environ. 2020, 250, 112012.
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666.
- Bhardwaj, A.; Sam, L.; Akanksha; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204.
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443.
- Gerhards, M.; Schlerf, M.; Mallick, K.; Udelhoven, T. Challenges and Future Perspectives of Multi-/Hyperspectral Thermal Infrared Remote Sensing for Crop Water-Stress Detection: A Review. Remote Sens. 2019, 11, 1240.
- Messina, G.; Modica, G. Applications of UAV thermal imagery in precision agriculture: State of the art and future research outlook. Remote Sens. 2020, 12, 1491.
- Gaffey, C.; Bhardwaj, A. Applications of unmanned aerial vehicles in cryosphere: Latest advances and prospects. Remote Sens. 2020, 12, 948. [Google Scholar] [CrossRef]
- Rödel, C.; Stadler, S.; Meschtscherjakov, A.; Tscheligi, M. Towards autonomous cars: The effect of autonomy levels on Acceptance and User Experience. In Proceedings of the Automotive UI 2014—6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, in Cooperation with ACM SIGCHI, Seattle, WA, USA, 17–19 September 2014.
- Caron, C. After Drone Hits Plane in Canada, New Fears About Air Safety. 2017. Available online: https://www.nytimes.com/2017/10/17/world/canada/canada-drone-plane.html (accessed on 19 May 2019).
- BBC. Drone’ Hits British Airways Plane Approaching Heathrow Airport. 2016. Available online: https://www.bbc.com/news/uk-36067591 (accessed on 19 May 2019).
- Canada, C. Drone That Struck Plane Near Quebec City Airport Was Breaking the Rules|CBC News. 2017. Available online: http://www.cbc.ca/news/canada/montreal/garneau-airport-drone-quebec-1.4355792 (accessed on 19 May 2019).
- BBC. Drone Collides with Commercial Aeroplane in Canada. 2017. Available online: https://www.bbc.com/news/technology-41635518 (accessed on 19 May 2019).
- Goglia, J. NTSB Finds Drone Pilot at Fault for Midair Collision with Army Helicopter. 2017. Available online: https://www.forbes.com/sites/johngoglia/2017/12/14/ntsb-finds-drone-pilot-at-fault-for-midair-collision-with-army-helicopter/ (accessed on 19 May 2019).
- Rawlinson, K. Drone Hits Plane at Heathrow Airport, Says Pilot. 2016. Available online: https://www.theguardian.com/uk-news/2016/apr/17/drone-plane-heathrow-airport-british-airways (accessed on 19 May 2019).
- Tellman, J.; News, T.V. First-Ever Recorded dRone-Hot Air Balloon Collision Prompts Safety Conversation. 2018. Available online: https://www.postregister.com/news/local/first-ever-recorded-drone-hot-air-balloon-collision-prompts-safety/article_7cc41c24-6025-5aa6-b6dd-6d1ea5e85961.html (accessed on 19 May 2019).
- Pedro, D.; Mora, A.; Carvalho, J.; Azevedo, F.; Fonseca, J. ColANet: A UAV Collision Avoidance Dataset. In Technological Innovation for Life Improvement; Springer: Cham, Switzerland, 2020.
- Gharibi, M.; Boutaba, R.; Waslander, S.L. Internet of Drones. IEEE Access 2016, 4, 1148–1162.