Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Robotics
Uncrewed aerial vehicles (UAVs), also known as drones, are ubiquitous and their use cases extend today from governmental applications to civil applications such as the agricultural, medical, and transport sectors, etc. In accordance with the requirements in terms of demand, it is possible to carry out various missions involving several types of UAVs as well as various onboard sensors.
- UAV
- RPAS
- UAS
- uncrewed aerial vehicles
- UAV Classifcation
1. Introduction
Uncrewed aerial vehicles (UAVs) or drones [1] belong to the large family of connected objects. After being utilized extensively in military operations [2,3], drones have remained out of reach for civilians [4] due to their high price. With recent innovations in micro-controllers and sensors, drone prices have been reduced to become affordable. Currently, they are widely used for commercial purposes such as surveys, photography, and cinematography. UAVs, in general, are outfitted with on-board sensors that allow them to collect geospatial information about their environment and are remotely controlled from a ground control station [5]. From this station, the operator can plan and supervise the evolution of the mission. Their use in the civil and industrial sector [4] has allowed us to optimize industrial processes or to carry out missions in hostile environments that are partially or entirely inaccessible to humans [6,7,8,9]. For example, in the agricultural field, farmers are now facing various problems that impact the quality of their crops. Drones are an efficient and cheap means to collect information on ecosystems and their variations due to, e.g., climate change, soil erosion, water availability, and meteorological extreme events. They are, for example, also used in spraying plantations, which saves time and optimizes yields [10]. Goodrich Payton et al. [11] have demonstrated the efficiency of drones in precision agriculture. From the collected data, they reconstructed a 3D cartographic representation of the plots to better analyze the density of vegetation and soil heterogeneities.
Drones provide a broad variety of purposes in the health sector, including delivering medical supplies to remote or hard-to-reach areas, e.g., transporting blood samples and lab results [12]. In the field of transportation, drones can be used for package delivery [13,14,15], traffic monitoring [16], and infrastructure inspections [17]. Drones have also been used to map volcanoes’ terrain and to detect volcanic activity. Thiele et al. [5] used drones equipped with thermal cameras, gas sensors, and other instruments to measure temperature, gas concentrations, and other indicators of volcanic activity. This information can be used to predict eruptions, to elaborate rescue operations, for photogrammetry and infrastructure monitoring, or even for delivery services. UAVs can also be used to study the geology of a volcano and its surrounding area, providing valuable information for volcano research. The use of UAVs in this field can greatly improve the efficiency, accuracy, and safety of operations, as well as decrease costs by reducing the need for human intervention in dangerous areas [5]. However, it implies several challenges related to communication services, such the range, security system, and communication architecture [18].
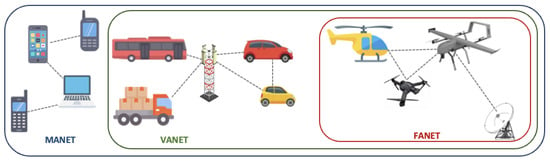
The communication architecture of drones relies on a Flying Ad-Hoc Network (FANET) [19], without the requirement for a fixed infrastructure. FANET is a decentralized ad-hoc network that enables communication between the ground station and flying vehicles, such as drones and aircraft [20]. As shown in Figure 1, FANET inherits from both Vehicular Ad-Hoc Network (VANET) [21] and Mobile Ad-Hoc Network (MANET) [22] networks. It is a subclass of MANET that is an extension to highly mobile devices such as smartphones and laptops. These three types of ad-hoc networks share the ability to form and maintain a network connection dynamically [23]. Combined, they are an effective tool in creating a wide-area network that links UAVs, vehicles, and communication devices. They can also be used for applications such as collision avoidance [24], traffic jam prevention, and intelligent transportation systems [25].
As the need for UAVs grows, there is an increasing requirement for systems that can coordinate several UAVs in a dispersed environment [1,26]. This is where multi-UAV systems are relevant. Multi-UAV systems, commonly called swarms, are composed of multiple UAVs that are coordinated to collaborate in order to accomplish a shared purpose [27]. These systems have the potential to coordinate mission tasks across multiple UAVs in a parallel manner. They have several possible applications, including rescue missions [7,28], surveillance and reconnaissance [6,26,29,30], environmental monitoring [17], and even payload carrying [13,14,15]. One of the primary benefits of swarms is their capacity to operate cohesively, allowing them to cover large regions quickly and make choices collectively, making them more robust to failure than individual UAVs [31]. Swarms operate according to the design of a multi-UAV system architecture that is controlled by a central system [6] or through decentralized algorithms [1,32,33].
To work in a coordinated manner, a multi-UAV system requires the following key components. (1) The UAVs themselves: these are the drones that make up the swarm. (2) A ground control station: this is the central point of control for the drone swarm. It oversees the transmission of commands to the drones, as well as the retrieval of data from them. It can be a single computer or a cluster of computing nodes. (3) A communication system: it consists of devices and antennas that enable communication between the drones and the ground station via a common protocol. The communication system can use a variety of technologies, including MANET [22], FANET [19], and VANET [21]. (4) A navigation system: this is the system that enables the UAVs to fly and locate themselves in the environment. It includes sensors such as GPS and Inertial Measurement Units (IMUs). (5) A control system: it allows the ground station to control the drones and to coordinate their actions. It consists of software for mission planning, decision making, and swarm behavior. (6) Finally, a data processing system: this is the system that allows the ground station to process the data in real time and feed the data back to the control system. It can include tools for image processing, data analysis, and machine learning. All these components work together to allow the swarm to function as a cohesive unit, with the ground station providing overall command and control, while the UAVs collaborate to attain a common aim.
Depending upon the operations’ nature and mission requirements, the architecture of a multi-UAV system might be centralized [6] or decentralized [32,33]. Because of its complexity and the very dynamic environment of operation, there are several challenges related to using multi-UAV for highly mobile networks operating in large-area missions:
-
Communication: maintaining communication between the drones in a swarm can be challenging, especially in highly mobile and wide areas. The drones must be able to maintain communication even when they are moving at high speeds or when they are far apart from each other.
-
Coordination: coordinating the actions of the UAVs is complex, especially in elaborate missions. To reach a shared purpose, the drones must be able to successfully collaborate.
-
Autonomy: the drones must be able to operate autonomously without human intervention. This requires collaborative actions for decision making, navigation, and swarm behavior. Theses challenges include spatial awareness, maintaining a distance from each other, and communicating potential threats to other drones, such as heavy wind gusts, rain, and obstructions.
-
Scalability: multi-UAV systems must be able to support a large number of drones, they must be reliable, and they must be able to scale up or down depending on the requirements of the mission.
-
Reliability: the system must be reliable, even if one or more UAVs fail. This requires robust algorithms for fault detection, diagnosis, and recovery.
-
Interference: in highly dynamic surroundings, drones may encounter interference from other wireless devices, which can affect communication or navigation [18].
-
Interoperability: the system must guarantee the exchange of information between different types of drones regardless of their communication protocols. Unfortunately, there is still no common protocol for drones to communicate with each other.
One key challenge in the design and implementation of multi-UAV systems is ensuring that the UAVs work together effectively in a distributed environment. This requires the development of robust communication and coordination architectures, as well as the integration of sensors and other equipment to allow the UAVs to sense and adapt to their environment. One of the main problems with swarms is the coordination of multiple UAVs carrying out a task in a distributed area. This problem can be addressed by using distributed algorithms. Algorithms such as consensus algorithms [43], leader–follower algorithms [44], and distributed optimization algorithms [45] can be used to coordinate multiple drones in a distributed area. These algorithms allow the UAVs to communicate and coordinate with each other so that they can complete the task in an efficient manner. Furthermore, these algorithms can also be used to ensure safety and prevent collisions between UAVs. Overall, these challenges require sophisticated algorithms and technologies, and the development of new solutions to these challenges is an active area of research in the field of drone swarm technology.
2. Classification of UAVs
The growing interest in UAVs in recent years has led to the strong emergence of various types of aircraft with varying configurations and components in terms of shape and size. UAVs are divided into four types: single-rotor, multi-rotor, fixed-wing, and hybrid [33], as shown in Figure 4.
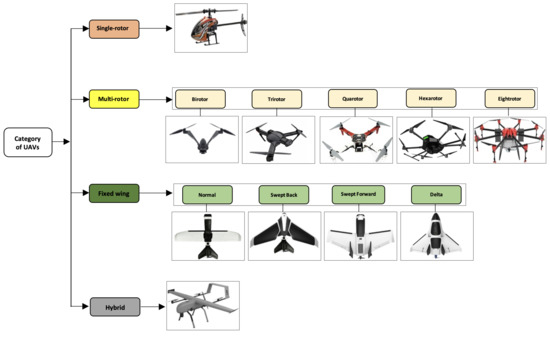
Figure 4. Different categories of UAVs.
- 1.
-
Single-rotor [50] (or helicopter): this category of UAVs takes off and lands vertically. Generally, they use a main rotor for attitude control (roll, pitch, and yaw) and a tail rotor to control the direction. Its main advantage is the ability to carry heavy payloads over a longer flight time. However, the complexity of their mechanical systems, as well as the large size and high cost of the rotors constitute a danger for the uncrewed versions. It is more unstable in bad weather.
- 2.
-
Multi-rotor [51] (or multicopter): this is a UAV having more than two rotors. This UAV category is further subdivided into five sub-categories, which are birotor, trirotor, quadrotor, hexarotor, and eight-rotor (octocopter) [13,15]. As with single-rotor UAVs, multi-rotor UAVs also ensure a vertical takeoff and landing. They are fast and agile in flight, allowing them to perform complex maneuvers and flights in confined spaces. However, the short flight time is the main weakness of these types of aircraft.
- 3.
-
Fixed-wing [52]: the navigation principle of this category of UAVs is based on a simple structure of a fixed rigid wing. The classification of these drones is not only based on the type of wing, but also on the body and the power system (Li-ion, Li-Po batteries, or gas-powered). They are subdivided into four subcategories: normal, swept back, swept forward, and delta. Furthermore, they can carry heavier payloads than multi-rotors [53]. The disadvantage of these UAVs is that they have limited agility in flight, which does not allow them to perform complex maneuvers and fly over confined spaces, as well as the necessity for a runway for takeoff and landing.
- 4.
-
Hybrid [54]: this last category is still under development. It is an improved version that takes advantage of both multi-rotor and fixed-wing UAVs. They offer good agility and velocity on long-distance flights. They can carry large payloads and do not require a runway. The main disadvantages are the high price, the complicated mechanics, and the lower performance in terms of flight stability and the restrictive speed ranges.
Table 1 presents a brief comparative study of the advantages and disadvantages of each category of UAV. This comparison focuses on payload capacity, endurance, agility, speed, and area of coverage.
Table 1. Comparative study of UAVs: advantages vs. disadvantages.
| Categories | Strengths | Weak Points |
|---|---|---|
| Single-rotor | Heavy payload Flight time Hovering flight VTOL |
Mechanical system Rotor size |
| Multi-rotor | Hovering flight VTOL Velocity Agile maneuverability Confined-space flying |
Flight time |
| Fixed-wing | Flight time High Velocity Large-area coverage |
Complex aerofoil Limited payload No hovering flight Limited maneuverability |
| Hybrid | Flight time Hovering flight VTOL Agile maneuverability Velocity Large-area coverage |
Very expensive Unstable transition mechanism from horizontal to vertical flight |
As shown in Table 2, four classes of UAVs, organized as very small, small, medium, and large, are usually defined.
Table 2. UAV classification according to the size (https://www.e-education.psu.edu/geog892/node/5, accessed on 15 March 2023).
| Size | Dimensions (m2) |
Payload (kg) |
Velocity (km/h) |
Altitude (km) |
Example (Accessed on 15 March 2023) |
|---|---|---|---|---|---|
| Very small | 0.3–0.5 | <9 | ≤10 | <0.12 | SmartPlane Pro (https://www.drohnen.de/tag/tobyrich/) DJI Mavic 3 (https://store.dji.com/de/product/dji-mavic-3) |
| Small | 0.51–2 | <185 | <0.4 | Wingcopter 198 (https://wingcopter.com/) Astro (https://freeflysystems.com/alta-x) Scorpion (https://www.quantum-systems.com/) |
|
| Medium | 5–10 | <200 | <463 | <1.1 | Trinity F90+ (https://www.quantum-systems.com/) Vector (https://www.quantum-systems.com/) Alta X (https://freeflysystems.com/alta-x) Yangda YD6-1600S (https://www.yangdaonline.com/) |
| Large | >10 | <600 | <5.5 | Primoco UAV One 150 (https://uav-stol.com/primoco-uav-one-150/) Feng Ru 3-100 (https://ev.buaa.edu.cn/info/1133/3165.htm) |
Very small UAVs refer to micro- or nano-UAVs. These UAVs resemble insects or birds with wings, and their dimensions generally vary between 5 and 50 cm. The components are extremely small and lightweight. They can reach a top speed of >10 km/h and are limited to a maximum altitude of ca. 120 m by law. Typical examples of very small UAVs include the German TobyRich SmartPlane Pro (https://www.drohnen.de/tag/tobyrich/, accessed on 15 March 2023) with a wing length of 30 cm; it is ultra-stable and equipped with a VGA camera of 640 × 480 pixels. Moreover, the DJI Mavic 3 (https://store.dji.com/de/product/dji-mavic-3, accessed on 15 March 2023), configured with dimensions of 28.3 × 10.7 cm2, is another small model of UAV; it is equipped with a 4:3 CMOS camera and can fly for 46 min with a maximum transmission range of ca. 15 km.
Small UAVs, often known as mini-UAVs, refer to UAVs whose dimensions exceed at least 50 cm and not more than 2 m. The design of these aircraft is essentially based on the fixed-wing model, and the majority are launched by propelling them into the air by the operator. They can carry a maximum payload of 9 kg and fly at a maximum speed of ca. 150 km/h at an altitude usually not exceeding 400 m. The German Wingcopter 198 (https://wingcopter.com/, accessed on 15 March 2023) is an electric VTOL drone used for delivery services. It is designed with a configuration of 198 × 154 cm2 with a flight time of 90 min. It is hybrid and can fly in both multicopter and fixed-wing modes. The second one is Astro (https://freeflysystems.com/alta-x, accessed on 15 March 2023), a quadrotor designed with a configuration of 141 × 51 cm2 with a flight time of 37 min. It incorporates a gimbaled a7R IV mapping camera and the data transfer is based on the MAVLink communication protocol [55]. The last one is Scorpion (https://www.quantum-systems.com/, accessed on 15 March 2023), a VTOL that has a wingspan of 1.37 m2 and a flight endurance of 35 min. It provides data transfer up to a range of 25 km and it supports a maximum weight of >7 kg.
A UAV is considered “medium” if it is too heavy to be handled by one person but smaller than an aeroplane, since they can only carry a payload of 200 kg. They are usually in the category of fixed-wing UAVs and typically have a wingspan whose length ranges from 5 to 10 m. They can fly at a maximum velocity of 463 km/h without exceeding an altitude of almost 1 km. There are numerous examples of UAVs in this scope of size, such as the Trinity F90+ (https://www.quantum-systems.com/, accessed on 15 March 2023), Vector (https://www.quantum-systems.com/, accessed on 15 March 2023), Alta X (https://freeflysystems.com/alta-x, accessed on 15 March 2023), and, recently, the Yangda YD6-1600S (https://www.yangdaonline.com/, accessed on 15 March 2023). The German intelligent VTOL Trinity F90+ and Vector have average fixed wings of 2.8 m and, respectively, a flight time of 90 min and 120 min. The Alta X is a VTOL quadrotor with a 50 min flight time and it carries a maximum payload of 15 kg for 8 min. It has a peak speed of more than >95 km/h and uses the MAVLink [55] protocol for data transmission. The hexacopter Yangda YD6-1600S is designed with dimensions of 1.6 × 2.35 m2. It can reach a cruise speed of >72 km/h and can also carry a maximum payload of 5 kg for a flight time not exceeding 45 min.
The last class of UAVs is mainly used for military purposes. The large UAVs have a wide range and endurance. Furthermore, their designs are usually based on a fixed-wing structure, which allows them to carry heavy payloads over long distances while reaching a maximum altitude of 5.5 km. Some examples of these UAVs are the Czech Primoco UAV One 150 (https://uav-stol.com/primoco-uav-one-150/, accessed on 15 March 2023) and the Chinese Feng Ru 3-100 (https://ev.buaa.edu.cn/info/1133/3165.htm, accessed on 15 March 2023). Primoco is designed to fly for 15 h. It can carry a payload of 50 kg and has a radio range of 200 km. Feng Ru is designed for couriers; it has a wingspan of 19.6 m and can fly for 5 days.
This entry is adapted from the peer-reviewed paper 10.3390/drones7040263
This entry is offline, you can click here to edit this entry!