Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
In this study the authors first give an overview of the different SLAM implementation approaches and then discuss the applications of SLAM for autonomous driving with respect to different driving scenarios, vehicle system components and the characteristics of the SLAM approaches. The authors then discuss some challenging issues and current solutions when applying SLAM for autonomous driving. Some quantitative quality analysis means to evaluate the characteristics and performance of SLAM systems and to monitor the risk in SLAM estimation are discussed. In addition, this study describes a real-world road test to demonstrate a multi-sensor-based modernized SLAM procedure for autonomous driving. The numerical results show that a high-precision 3D point cloud map can be generated by the SLAM procedure with the integration of Lidar and GNSS/INS.
- Simultaneous Localization and Mapping
- autonomous driving
- localization
- high definition map
Depending on the different characteristics of SLAM techniques, there could be different applications for autonomous driving. One classification of the applications is whether they are offline or online. A map satisfying a high-performance requirement is typically generated offline, such as the High Definition (HD) map [1]. For this kind of 3D point cloud map, an offline map generation process ensures the accuracy and reliability of the map. Such maps can be pre-generated to support the real-time operations of autonomous vehicles.
1 High Definition Map Generation and Updating
As stated earlier, SLAM can be used to generate digital maps used for autonomous driving, such as the HD map [1]. Due to the stringent requirements, high quality sensors are used. Lidar is one of the core sensors for automated cars as it can generate high-density 3D point clouds. High-end GNSS and INS technology are also used to provide accurate position information. Cameras can provide information that is similar to the information detected by human eyes. The fusion of sensor data and analysis of road information to generate HD maps needs considerable computational power, which is not feasible in current onboard vehicle systems. Therefore the HD map is built-up offline, using techniques such as optimization-based SLAM. The offline map creation can be performed by driving the road network several times to collect information, and then all the collected perceptive sensor information and position information is processed together to improve the accuracy of the final map. An example of a HD map is shown in Figure 4 [2].
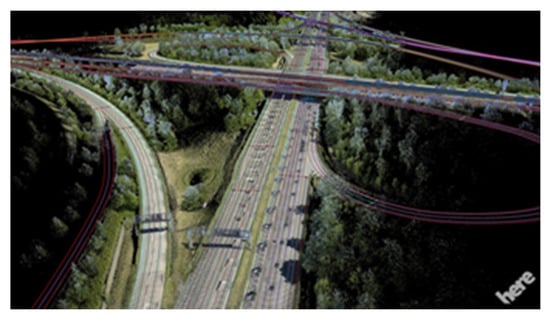
Figure 4. An image from a high definition map (https://here.com/) [2].
The road environment and road rules may change, for instance, the speed limit may be reduced due to road work, road infrastructure may be changed due to building development, and so on. Therefore the HD map needs frequent updates. Such updates can utilize the online data collected from any autonomous car. For example, the data is transmitted to central (cloud) computers where the update computations are performed. Other cars can receive such cloud-based updates and make a timely adjustment to driving plans. Jo et al. [3] proposed a SLAM change update (SLAMCU) algorithm, utilizing a Rao–Blackwellized PF approach for online vehicle position and (new) map state estimation. In the work of [4], a new feature layer of HD maps can be generated using Graph SLAM when a vehicle is temporarily stopped or in a parking lot. The new feature layer from one vehicle can then be uploaded to the map cloud and integrated with that from other vehicles into a new feature layer in the map cloud, thus enabling more precise and robust vehicle localization. In the work of Zhang et al. [5], real-time semantic segmentation and Visual SLAM were combined to generate semantic point cloud data of the road environment, which was then matched with a pre-constructed HD map to confirm map elements that have not changed, and generate new elements when appearing, thus facilitating crowdsource updates of HD maps.
2 Small Local Map Generation
SLAM can also be used for small local areas. One example is within parking areas. The driving speed in a parking lot is low, therefore the vision technique will be more robust than in other high-speed driving scenarios. The parking area could be unknown (public parking lot or garage), or known (home zone)–both cases can benefit from SLAM. Since SLAM can be used without GNSS signals, it is suitable for vehicles in indoor or underground parking areas, using just the perceptive sensor and odometry measurements (velocity, turn angle) or IMU measurements. For unknown public parking areas, the position of the car and the obstacles, such as pillars, sidewalls, etc., can be estimated at the same time, guiding the parking system. For home zone parking, the pre-generated map and a frequent parking trajectory can be stored within the automated vehicle system. Each time the car returns home, re-localization using the stored map can be carried out by matching detected features with the map. The frequent trajectory could be used for the planning and controlling steps.
An approach that utilizes multi-level surface (MLS) maps to locate the vehicle, and to calculate and plan the vehicle path within indoor parking areas was proposed in [6]. In this study, graph-based SLAM was used for mapping, and the MLS map is then used to plan a global path from the start to the destination, and to robustly localize the vehicle with laser range measurements. In the work of [7], a grid map and an EKF SLAM algorithm were used with W-band radar for autonomous back-in parking. In this work, an efficient EKF SLAM algorithm was proposed to enable real-time processing. In [8], the authors proposed an around-view monitor (AVM)/ Lidar sensor fusion method to recognize the parking lane and to provide rapid loop closing performance. The above studies have demonstrated that both filter-based SLAM and optimization-based SLAM can be used to support efficient and accurate vehicle parking assistance (local area mapping and localization), even without GNSS. In the work of Qin et al. [9], pose graph optimization is performed so as to achieve an optimized trajectory and a global map of a parking lot, with semantic features such as guide signs, parking lines, and speed bumps. These kinds of features are more (long-term) stable and robust than traditional geometrical features, especially in underground parking environments. An EKF was then used to complete the localization system for autonomous driving.
3 Localization within the Existing Map
In map-based localization, a matching method is used to match “live” data with map information, using methods such as Iterative Closest Point (ICP), Normal Distribution Transform (NDT), and others [1][10]. These algorithms can be linked to the SLAM problem since SLAM executes loop closing and re-localization using similar methods. For a SLAM problem, the ability to recognize a previously mapped object or feature and to relocate the vehicle within the environment is essential for correcting the maps [11]. Therefore, the reuse of a pre-generated map to localize the vehicle can be considered an extension of a SLAM algorithm. In other words, the pre-generated and stored map can be treated as a type of “sensor” to support localization.
This entry is adapted from the peer-reviewed paper 10.3390/rs15041156
References
- Liu, R.; Wang, J.; Zhang, B. High definition map for automated driving, overview and analysis. J. Navig. 2020, 73, 324–341.
- HERE. HERE HD Live Map—The Most Intelligent Vehicle Sensor. 2017. . Available online: https://here.com/en/products-services/products/here-hd-live-map (accessed on 19 March 2017).
- Jo, K.; Kim, C.; Sunwoo, M. Simultaneous localization and map change update for the high definition map-based autonomous driving car. Sensors 2018, 18, 3145.
- Kim, C.; Cho, S.; Sunwoo, M.; Jo, K. Crowd-sourced mapping of new feature layer for high-definition map. Sensors 2018, 18, 1472.
- Zhang, P.; Zhang, M.; Liu, J. Real-Time HD Map Change Detection for Crowdsourcing Update Based on Mid-to-High-End Sensors. Sensors 2021, 21, 2477.
- Kummerle, R.; Hahnel, D.; Dolgov, D.; Thrun, S.; Burgard, W. Autonomous driving in a multi-level parking structure. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3395–3400.
- Lee, H.; Chun, J.; Jeon, K. Autonomous back-in parking based on occupancy grid map and EKF SLAM with W-band radar. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Australia, 27–31 August 2018; pp. 1–4.
- Im, G.; Kim, M.; Park, J. Parking line based SLAM approach using AVM/LiDAR sensor fusion for rapid and accurate loop closing and parking space detection. Sensors 2019, 19, 4811.
- Qin, T.; Chen, T.; Chen, Y.; Su, Q. AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5939–5945.
- Zheng, S.; Wang, J. High definition map based vehicle localization for highly automated driving. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June 2017; pp. 1–8.
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220.
This entry is offline, you can click here to edit this entry!