Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Others
Abstract
The Simultaneous Localization and Mapping (SLAM) technique has achieved astonishing progress over the last few decades and has generated considerable interest in the autonomous driving community. With its conceptual roots in navigation and mapping, SLAM outperforms some traditional positioning and localization techniques since it can support more reliable and robust localization, planning, and controlling to meet some key criteria for autonomous driving. In this study the authors first give an overview of the different SLAM implementation approaches and then discuss the applications of SLAM for autonomous driving with respect to different driving scenarios, vehicle system components and the characteristics of the SLAM approaches. The authors then discuss some challenging issues and current solutions when applying SLAM for autonomous driving. Some quantitative quality analysis means to evaluate the characteristics and performance of SLAM systems and to monitor the risk in SLAM estimation are reviewed. In addition, this study describes a real-world road test to demonstrate a multi-sensor-based modernized SLAM procedure for autonomous driving. The numerical results show that a high-precision 3D point cloud map can be generated by the SLAM procedure with the integration of Lidar and GNSS/INS. Online four–five cm accuracy localization solution can be achieved based on this pre-generated map and online Lidar scan matching with a tightly fused inertial system.
- Simultaneous Localization and Mapping
- autonomous driving
- localization
- high definition map
1. Introduction
Autonomous (also called self-driving, driverless, or robotic) vehicle operation is a significant academic as well as an industrial research topic. It is predicted that fully autonomous vehicles will become an important part of total vehicle sales in the next decades. The promotion of autonomous vehicles draws attention to the many advantages, such as service for disabled or elderly persons, reduction in driver stress and costs, reduction in road accidents, elimination of the need for conventional public transit services, etc. [1][2].
A typical autonomous vehicle system contains four key parts: localization, perception, planning, and controlling (Figure 1). Positioning is the process of obtaining a (moving or static) object’s coordinates with respect to a given coordinate system. The coordinate system may be a local coordinate system or a geodetic datum such as WGS84. Localization is a process of estimating the carrier’s pose (position and attitude) in relation to a reference frame or a map. The perception system monitors the road environment around the host vehicle and identifies interested objects such as pedestrians, other vehicles, traffic lights, signage, etc.
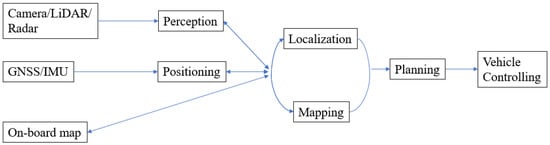
Figure 1. Functional components of an autonomous driving system.
By determining the coordinates of objects in the surrounding environment a map can be generated. This process is known as Mapping.
Path planning is the step that utilizes localization, mapping, and perception information to determine the optimal path in subsequent driving epochs, guiding the automated vehicle from one location to another location. This plan is then converted into action using the controlling system components, e.g., brake control before the detected traffic lights, etc.
All these parts are closely related. The location information for both vehicle and road entities can be obtained by combining the position, perception, and map information. In contrast, localization and mapping can be used to support better perception. Accurate localization and perception information is essential for correct planning and controlling.
To achieve fully automated driving, there are some key requirements that need to be considered for the localization and perception steps. The first is accuracy. For autonomous driving, the information about where the road is and where the vehicle is within the lane supports the planning and controlling steps. To realize these, and to ensure vehicle safety, there is a stringent requirement for position estimation at the lane level, or even the “where-in-lane” level (i.e., the sub-lane level). Recognition range is important because the planning and controlling steps need enough processing time for the vehicle to react [3]. Robustness means the localization and perception should be robust to any changes while driving, such as driving scenarios (urban, highway, tunnel, rural, etc.), lighting conditions, weather, etc.
Traditional vehicle localization and perception techniques cannot meet all of the aforementioned requirements. For instance, GNSS error occurs as the signals may be distorted, or even blocked, by trees, urban canyons, tunnels, etc. Often an inertial navigation system (INS) is used to support navigation during GNSS signal outages, to continue providing position, velocity, and altitude information. However, inertial measurement bias needs frequently estimated corrections or calibration, which is best achieved using GNSS measurements. Nevertheless, an integrated GNSS/INS system is still not sufficient since highly automated driving requires not only positioning information of the host vehicle, but also the spatial characteristics of the objects in the surrounding environment. Hence perceptive sensors, such as Lidar and Cameras, are often used for both localization and perception. Lidar can acquire a 3D point cloud directly and map the environment, with the aid of GNSS and INS, to an accuracy that can reach the centimeter level in urban road driving conditions [4]. However, the high cost has limited the commercial adoption of Lidar systems in vehicles. Furthermore, its accuracy is influenced by weather (such as rain) and lighting conditions. Compared to Lidar, Camera systems have lower accuracy but are also affected by numerous error sources [5][6]. Nevertheless, they are much cheaper, smaller in size, require less maintenance, and use less energy. Vision-based systems can provide abundant environment information, similar to what human eyes can perceive, and the data can be fused with other sensors to determine the location of detected features.
A map with rich road environment information is essential for the aforementioned sensors to achieve accurate and robust localization and perception. Pre-stored road information makes autonomous driving robust to the changing environment and road dynamics. The recognition range requirement can be satisfied since an onboard map can provide timely information on the road network. Map-based localization and navigation have been studied using different types of map information. Google Map is one example as it provides worldwide map information including images, topographic details, and satellite images [7], and it is available via mobile phone and vehicle apps. However, the use of maps will be limited by the accuracy of the maps, and in some selected areas the map’s resolution may be inadequate. In [8], the authors considered low-accuracy maps for navigation by combining data from other sensors. They detected moving objects using Lidar data and utilized a GNSS/INS system with a coarse open-source GIS map. Their results show their fusion technique can successfully detect and track moving objects. A precise curb-map-based localization method that uses a 3D-Lidar sensor and a high-precision map is proposed in [9]. However, this method will fail when curb information is lacking, or obstructed.
Recently, so-called “high-definition” (HD) maps have received considerable interest in the context of autonomous driving since they contain very accurate, and large volumes of, road network information [10]. According to some major players in the commercial HD map market, 10–20 cm accuracy has been achieved [11][12], and it is predicted that in the next generation of HD maps, a few centimeters of accuracy will be reached. Such maps contain considerable information on road features, not only the static road entities and road geometry (curvature, grades, etc.), but also traffic management information such as traffic signs, traffic lights, speed limits, road markings, and so on. The autonomous car can use the HD map to precisely locate the host-car within the road lane and to estimate the relative location of the car with respect to road objects by matching the landmarks which are recognized by onboard sensors with pre-stored information within the HD map.
Therefore, maps, especially HD maps, play several roles in support of autonomous driving and may be able to meet the stringent requirements of accuracy, precision, recognition ranging, robustness, and information richness. However, the application of the “map” for autonomous driving is also facilitated by techniques such as Simultaneous Localization and Mapping (SLAM). SLAM is a process by which a moving platform builds a map of the environment and uses that map to deduce its location at the same time. SLAM, which is widely used in the robotic field, has been demonstrated [13][14] as being applicable for autonomous vehicle operations as it can support not only accurate map generation but also online localization within a previously generated map.
With appropriate sensor information (perception data, absolute and dead reckoning position information), a high-density and accurate map can be generated offline by SLAM. When driving, the self-driving car can locate itself within the pre-stored map by matching the sensor data to the map. SLAM can also be used to address the problem of DATMO (detection and tracking of moving objects) [15] which is important for detecting pedestrians or other moving objects. As the static parts of the environment are localized and mapped by SLAM, the dynamic components can concurrently be detected and tracked relative to the static objects or features. However, SLAM also has some challenging issues when applied to autonomous driving applications. For instance, “loop closure” can be used to reduce the accumulated bias within SLAM estimation in indoor or urban scenarios, but it is not normally applicable to highway scenarios.
This paper will review some key techniques for SLAM, the application of SLAM for autonomous driving, and suitable SLAM techniques related to the applications. Section 2 gives a brief introduction to the principles and characteristics of some key SLAM techniques. Section 3 describes some potential applications of SLAM for autonomous driving. Some challenging issues in applying the SLAM technique for autonomous driving are discussed in Section 4. A real-world road test to show the performance of a multi-sensor-based SLAM procedure for autonomous driving is described in Section 5. The conclusions are given in Section 6.
This entry is adapted from the peer-reviewed paper 10.3390/rs15041156
References
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning. In Proceedings of the 2015 Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 January 2015.
- Katrakazas, C.; Quddus, M.; Chen, W.H.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. C-EMER 2015, 60, 416–442.
- Seif, H.G.; Hu, X. Autonomous driving in the iCity- HD maps as a key challenge of the automotive industry. Engineering 2016, 2, 159–162.
- Suganuma, N.; Yamamto, D.; Yoneda, K. Localization for autonomous vehicle on urban roads. J. Adv. Control Autom. Robot. 2015, 1, 47–53.
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendon-Mancha, J.M. Visual simultaneous localization and mapping: A survey. Aritf. Intell. Rev. 2015, 43, 55–81.
- Pupilli, M.; Calway, A. Real-time visual SLAM with resilience to erratic motion. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), 2006, New York, NY, USA, 17–22 June 2006; pp. 1244–1249.
- He, L.; Lai, Z. The study and implementation of mobile GPS navigation system based on Google maps. In Proceedings of the International Conference on Computer and Information Application (ICCIA), Tianjin, China, 3–5 December 2010; pp. 87–90.
- Hosseinyalamdary, S.; Balazadegan, Y.; Toth, C. Tracking 3D moving objects based on GPS/IMU navigation solution, Laser Scanner Point Cloud and GIS Data. ISPRS Int. J. Geo.-Inf. 2015, 4, 1301–1316.
- Wang, L.; Zheng, Y.; Wang, J. Map-based Localization method for autonomous vehicle using 3D-LiDAR. IFCA Pap. 2017, 50, 278–281.
- Liu, R.; Wang, J.; Zhang, B. High definition map for automated driving, overview and analysis. J. Navig. 2020, 73, 324–341.
- HERE. HERE HD Live Map—The Most Intelligent Vehicle Sensor. 2017. . Available online: https://here.com/en/products-services/products/here-hd-live-map (accessed on 19 March 2017).
- TomTom. 2017, RoadDNA, Robust and Scalable Localization Technology. Available online: http://download.tomtom.com/open/banners/RoadDNA-Product-Info-Sheet-1.pdf (accessed on 25 May 2019).
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220.
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things 2018, 5, 829–846.
- Wang, C.C.; Thorpe, C.; Thrun, S.; Hebert, M.; Durrant-Whyte, H. Simultaneous Localization, Mapping and Moving Object Tracking. Int. J. Robot. Res. 2007, 26, 889–916.
This entry is offline, you can click here to edit this entry!